1.本发明涉及清洁技术领域,特别是涉及一种垃圾袋封口装置及清洁设备。
背景技术:
2.为了提高清洁设备的清洁效率,清洁设备上增加了垃圾袋打包装置,使得清洁设备在垃圾仓装满时不必到固定的垃圾场倾倒垃圾,而是直接从垃圾仓将装满垃圾的垃圾袋排到路边。但是在给垃圾袋打包的过程中,由于树枝等异物存在,会导致垃圾袋密封性不高;此外在给垃圾袋打包过程中,超声波焊接组件会发出较大的噪音,给环境带来不利影响。
技术实现要素:
3.基于此,本发明的目的在于提供一种垃圾袋焊接密封性高且封口过程中噪音小的垃圾袋封口装置及清洁设备。
4.第一方面,本发明实施例提供一种垃圾袋封口装置,包括:
5.框架,所述框架中间设有供垃圾袋穿过的通孔;
6.封口机构,所述封口机构安装在所述框架上,所述封口机构包括封口驱动组件、封口组件以及超声波焊接组件,所述封口驱动组件能驱动所述封口组件沿预设路径朝所述超声波焊接组件运动,所述预设路径经过所述通孔;
7.所述预设路径的起点位置和终点位置之间具有第一预设位置,所述超声波焊接组件在所述封口组件运动至所述第一预设位置时开始工作。
8.可选地,在所述封口组件运动至终点位置时,所述超声波焊接组件继续工作第一预设时间。
9.可选地,在所述封口组件由所述第一预设位置运动至所述终点位置过程中,所述封口组件运动速度的范围为2mm/s-15mm/s。
10.可选地,所述封口机构包括第一位置传感器和第一感应器,所述第一位置传感器安装在所述封口组件和所述框架中的一者上,所述第一感应器安装在所述封口组件和所述框架中的另一者上,在所述第一位置传感器检测到所述第一感应器时,所述封口组件运动至所述第一预设位置;或者,
11.所述封口驱动组件包括伺服驱动电机,所述伺服驱动电机内置有编码器,在所述编码器检测的脉冲个数达到预设数量时,所述封口组件运动至所述第一预设位置。
12.可选地,所述预设路径上具有位于第一预设位置和终点位置之间的第二预设位置;
13.在所述封口组件运动至第二预设位置时,所述封口驱动组件停止驱动第二预设时间,再接着驱动所述封口组件沿预设路径朝所述超声波焊接组件运动,所述超声波焊接组件在所述第二预设时间内持续工作。
14.可选地,所述封口机构包括安装在所述封口组件上的压力传感器,在所述压力传
感器检测到的压力达到预设阈值时,所述封口组件运动至所述第二预设位置;或者,
15.所述封口机构包括第二位置传感器和第二感应器,所述第二预设位置传感器安装在所述封口组件和所述框架中的一者上,所述第二感应器安装在所述封口组件和所述框架中的另一者上;在所述第二预设位置传感器检测到所述第二感应器时,所述封口组件运动至所述第二预设位置;或者,
16.所述封口驱动组件包括伺服驱动电机,所述伺服驱动电机内置有编码器,在所述编码器检测的脉冲个数达到预设数量时,所述封口组件运动至所述第二预设位置。
17.可选地,所述封口组件包括封口杆和安装在所述封口杆中部的压板;
18.所述封口驱动组件包括两组直线驱动组件,所述两组直线驱动组件分别与所述封口杆的两端连接,或者所述封口驱动组件包括电机,两个传动件和两个并排设置的丝杆,所述电机通过传动件与所述丝杆传动连接,所述封口杆的两端分别安装在所述丝杆的滑座上。
19.可选地,所述超声波焊接组件包括超声波发生器和超声波模头,所述超声波发生器安装在所述框架上,所述超声波模头安装在所述超声波发生器的端部。
20.可选地,所述预设路径的沿向为第一方向;所述垃圾袋封口装置还包括安装在所述框架上的收拢机构,所述收拢机构包括收拢驱动组件和收拢杆,所述收拢驱动组件驱动所述收拢杆沿着第二方向运动,所述第二方向和所述第一方向垂直相交。
21.第二方面,本发明实施例还提供一种清洁设备,包括:
22.底盘;
23.垃圾仓,所述垃圾仓安装在所述底盘的底部,所述垃圾仓设有垃圾袋入口;
24.垃圾袋盒,所述垃圾袋盒位于所述垃圾仓的上方,所述垃圾袋盒内部收纳有垃圾袋,所述垃圾袋盒设有垃圾袋出口;
25.上述第一方面任一种可能实现的垃圾袋封口装置,所述垃圾袋封口装置安装在所述底盘上且位于所述垃圾仓和所述垃圾袋盒之间,所述垃圾袋封口装置的通孔与所述垃圾袋入口和所述垃圾袋出口连通。
26.本发明的有益技术效果如下:
27.在本发明实施例提供的技术方案中,在垃圾袋口存在异物时,由于超声波焊接组件在第一预设位置与终点位置之间就处于工作状态,能够提前振碎或者振落异物,从而减少或取消超声波焊接组件在终点位置的工作时间,能提高垃圾袋的焊接密封性。而在垃圾袋口不存在异物时,由于超声波焊接组件在终点位置工作时间的减少或取消,相应的能减少或者消除超声波焊接组件在该阶段产生的噪音。虽然超声波焊接组件在第一预设位置与终点位置之间处于工作状态,但由于这一阶段超声波焊接组件与封口组件之间有比较大的距离,两者不会接触,因此不会因为碰撞产生噪音。
28.为了更好地理解和实施,下面结合附图详细说明本发明。
附图说明
29.图1为本发明实施例提供的一种垃圾袋封口装置的立体结构图;
30.图2为本发明实施例提供的一种垃圾袋封口装置的主视图;
31.图3为本发明实施例提供的一种垃圾袋封口装置的俯视图;
32.图4为本发明实施例提供的一种清洁设备的剖视图。
具体实施方式
33.在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于其构造进行定义的,它们是相对的概念。因此,有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
34.以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与本公开的一些方面相一致的实施方式的例子。
35.在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。在本公开中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。除非有相反的说明,本发明实施例提及“第一”、“第二”等序数词用于对多个对象进行区分,不用于限定多个对象的顺序、时序、优先级或者重要程度。
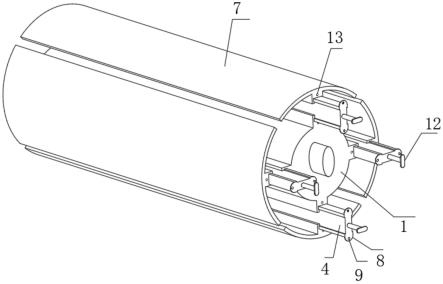
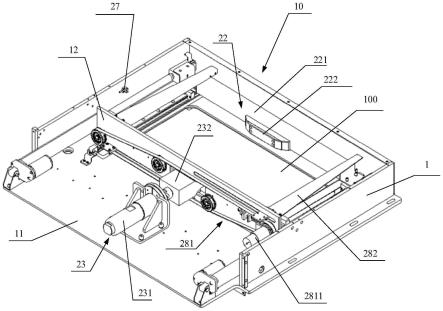
36.如图1-3所示,本发明实施例提供一种垃圾袋封口装置10,包括:
37.框架1,框架1中间设有供垃圾袋穿过的通孔100;
38.封口机构2,封口机构2安装在框架1上,封口机构2包括封口驱动组件21、封口组件22以及超声波焊接组件23,封口驱动组件21能驱动封口组件22沿预设路径朝超声波焊接组件23运动,该预设路径经过通孔100;
39.该预设路径的起点位置和终点位置之间具有第一预设位置,超声波焊接组件23在封口组件22运动至第一预设位置时开始工作。
40.目前垃圾袋封口装置的工作方法是:在封口组件运动到终点位置时,超声波焊接组件启动,以将垃圾袋封口并切断。由于垃圾袋口有时候会存在树枝等异物,为了保证垃圾袋能够正常密封,一种方式是增加超声波焊接组件在终点位置的工作时间。但这样的话,在垃圾袋口不存在异物时,垃圾袋封口并切断后还剩下一些时间,剩下的时间中超声波焊接组件会不断与封口组件之间碰撞产生很大的噪音。
41.采用本发明实施例的方案,在垃圾袋口存在异物时,由于超声波焊接组件23在第一预设位置与终点位置之间就处于工作状态,能够提前振碎或者振落异物,因此能提高垃圾袋的焊接密封性。由于异物提前被振碎或者振落,可以减少或者取消超声波焊接组件23在终点位置的工作时间。这样在垃圾袋口不存在异物时,由于超声波焊接组件23在终点位置的工作时间时间减少或者消除,超声波焊接组件23在完成垃圾袋封口和切断后就可以停止工作或者只工作一小段时间,从而不会再额外产生噪音或者减少了额外产生的噪音。虽然超声波焊接组件23在第一预设位置与终点位置之间处于工作状态,但由于该阶段中超声波焊接组件23与封口组件22之间有比较大的距离,两者不会接触,因此不会在这一阶段碰撞产生噪音。
42.在具体实施时,第一预设位置可以是根据垃圾袋开口处的异物大小设定。示例性的,封口组件22在运动到第一预设位置时,与超声波焊接组件23之间的距离可以为20至30mm。
43.在具体实施时,框架1包括底板11,底板11的中部开设有该通孔100。
44.可选地,在封口组件22运动至终点位置时,超声波焊接组件23继续工作第一预设
时间。由于终点位置和超声波焊接组件23振幅的选择,在某些实施例中,在封口组件22运动至终点位置时,垃圾袋还没有完成封口和切断,本实施例通过合理的设定超声波焊接组件23继续工作第一预设时间,确保切断垃圾袋的焊接封口,以及降低封口组件22和超声波焊接组件23之间碰撞接触的时长。
45.在具体实施时,终点位置和第一预设时间可以根据垃圾袋开口处的异物大小以及垃圾袋的厚度设定。示例性的,第一预设时间可以设定为1s至3s,封口组件22运动至终点位置时,封口组件22与超声波焊接组件23之间的距离为0.4mm至0.6mm。
46.可选地,在封口组件22由第一预设位置运动至终点位置过程中,封口组件22运动速度的范围为2mm/s-15mm/s。由于封口组件22从第一预设位置运动至终点位置的过程中,封口组件22和超声波焊接组件23之间还未全部压紧垃圾袋,超声波焊接组件23提前在封口组件22的此运动过程中工作。
47.在具体实施时,封口组件22的运动速度在第一预设位置和终点位置之间可以根据使用工况设定。例如,若垃圾袋开口处的异物多,则封口组件22的运动速度可以设置较慢,此时,超声波焊接组件23的振幅可以调高,反之,封口组件22的运动速度可以设置较快,此时,超声波焊接组件23的振幅可以调小。
48.可选地,在一种实施方式中,封口机构2包括第一位置传感器24和第一感应器25,第一位置传感器24安装在封口组件22和框架1中的一者上,第一感应器25安装在封口组件22和框架1中的另一者上,在第一位置传感器24检测到第一感应器25时,封口组件22运动至第一预设位置,从而可以精准地对封口组件22进行定位。其中,图1-3以封口机构2包括第一位置传感器24和第一感应器25为例。通过采用第一位置传感器24和第一感应器25来定位封口组件22,具有控制简单、通用性、结构简单以及成本低的特点。
49.在具体实施时,第一位置传感器24可以为光电传感器,第一感应器25可以是感应片。当然,第一位置传感器24和第一感应器25也可以是任何可用于检测位置的元器件,本发明实施例不限定。
50.可选地,在另一种实施方式中,封口驱动组件21包括伺服驱动电机2811,伺服驱动电机2811内置有编码器,在编码器检测的脉冲个数达到预设数量时,封口组件22运动至第一预设位置,从而可以精准地对封口组件22进行定位。
51.可选地,预设路径上具有位于第一预设位置和终点位置之间的第二预设位置;在封口组件22运动至第二预设位置时,封口驱动组件21停止驱动第二预设时间,再接着驱动封口组件22沿预设路径朝超声波焊接组件23运动,超声波焊接组件23在第二预设时间内持续工作,使得在垃圾袋的开口处存在较多异物的情况下,使得封口组件22和超声波焊接组件23之间更能产生震动能量,更容易将垃圾袋开口处的异物融化,以进一步提高垃圾袋封口的密封性。其中,图1-3以封口机构2包括第二位置传感器26和第二感应器27为例。通过采用第二位置传感器26和第二感应器27来定位封口组件22,具有控制简单、通用性、结构简单以及成本低的特点。
52.在具体实施时,第二位置传感器26可以为光电传感器,第二感应器27可以是感应片。当然,第二位置传感器26和第二感应器27也可以是任何可用于检测位置的元器件,本发明实施例不限定。其中,第二位置传感器26和上述第一位置传感器24可以是相同或不同类型的位置传感器,第二感应器27和第一感应器25可以是相同或者不同类型的传感器。
53.可选地,在一种实施方式中,封口机构2包括安装在封口组件22上的压力传感器,在压力传感器检测到的压力达到预设阈值时,封口组件22运动至第二预设位置。在封口组件22遇到树枝等异物时,在前进的过程中会受到很大的挤压力。通过设置压力传感器,可以根据封口组件22与超声波焊接组件23之间压力来确定设定第二预设位置,以便于灵活控制封口组件22的运动,进一步可以确保将垃圾袋开口处的异物融化,还可以达到节能、效率高的效果。
54.可选地,在另一种实施方式中,封口机构2包括第二位置传感器26和第二感应器27,第二位置传感器26安装在封口组件22和框架1中的一者上,第二感应器27安装在封口组件22和框架1中的另一者上;在第二位置传感器26检测到第二感应器27时,所述封口组件22运动至第二预设位置。通过设置第二位置传感器26和第二感应器27,可以精准控制封口组件22的运动停止位置,进一步可以确保将垃圾袋开口处的异物融化。
55.可选地,在又一种实施方式中,封口驱动组件21包括伺服驱动电机2811,伺服驱动电机2811内置有编码器,在编码器检测的脉冲个数达到预设数量时,封口组件22运动至第二预设位置。通过设置伺服驱动电机2811,可以精准控制封口组件22的运动停止位置,进一步可以确保将垃圾袋开口处的异物融化。
56.可选地,封口组件22包括封口杆221和安装在封口杆221中部的压板222。可以通过压板222与超声波焊接组件23挤压垃圾袋的开口处,进行垃圾袋的封口焊接。示例性的,封口杆221在运动到第一预设位置时,压板222与超声波焊接组件23之间的距离可以为25mm,封口杆221在运动到终点位置时,压板222与超声波焊接组件23之间的距离可以为0.5mm。
57.可选地,在一种实施方式中,封口驱动组件21包括两组直线驱动组件211,两组直线驱动组件211分别与封口杆221的两端连接。在具体实施时,可以通过两组直线驱动组件211驱动封口杆221朝向或远离超声波焊接组件23运动。具体地,直线驱动组件211包括电动推杆。其中,图1-3以封口驱动组件21包括直线驱动组件211为例。
58.可选地,在另一种实施方式中,封口驱动组件21包括电机,两个传动件和两个并排设置的丝杆,电机通过传动件与丝杆传动连接,封口杆221的两端分别安装在丝杆的滑座上。在具体实施时,电机可以通过传动件驱动丝杆的滑座带动封口杆221朝向或远离超声波焊接组件23运动。传动件可以为齿轮传动组件,也可以为皮带传动组件。
59.可选地,超声波焊接组件23包括超声波发生器231和超声波模头232,超声波发生器231安装在底板11,超声波模头232安装在所述超声波发生器231的端部。在具体实施时,超声波模头232与压板222正对,与压板222共同压紧垃圾袋,并对垃圾袋进行封口。
60.可选地,预设路径的沿向为第一方向;垃圾袋封口装置10还包括安装在框架1上的收拢机构28,收拢机构28包括收拢驱动组件281和收拢杆282,收拢驱动组件281收拢杆282沿着第二方向,以将垃圾袋口收拢到超声波模头232的宽度,所述第二方向和所述第一方向垂直相交,以便于与封口驱动组件21和超声波焊接组件23压紧垃圾袋,并对垃圾袋进行封口,可以提高收拢垃圾袋的效率。
61.在具体实施时,收拢杆282设有两个,框架1还包括侧板12,收拢驱动组件281包括均设于侧板12远离封口杆221一侧的侧壁上的驱动电机2811、第一同步带轮2812、第二同步带轮2813,以及同步皮带2814,第一侧板12两端对应设有第一同步带轮2812和第二同步带轮2813,第一同步带轮2812和第二同步带轮2813之间绕设有同步皮带2814,驱动电机2811
用于驱动第一同步带轮2812和第二同步带轮2813转动,两个收拢杆282对应与该侧板12上部和下部的同步皮带2814固定连接,以在同步皮带2814的传动下带动两收拢杆282沿第二方向相互靠近或远离。
62.在具体实施时,收拢驱动组件281还包括均设于侧板12远离封口杆221一侧侧壁的第一同步惰轮2815和第二同步惰轮2816,第一同步惰轮2815和第二同步惰轮2816对应邻近于封口组件22的两侧,第一同步带轮2812和第一同步惰轮2815处于同一高度且均位于侧板12上部,第二同步带轮2813和第二同步惰轮2816处于同一高度且均位于第一侧板12下部,同步皮带2814绕设于第一同步带轮2812、第二同步带轮2813、第一同步惰轮2815,以及第二同步惰轮2816之间,可以方便收拢驱动组件281的布置。
63.本发明实施例还提供一种清洁设备,包括:底盘20;垃圾仓30,垃圾仓30安装在底盘20的底部,垃圾仓30设有垃圾入口;垃圾袋盒40,垃圾袋盒40位于垃圾仓30的上方,垃圾袋盒40内部收纳有垃圾袋,垃圾袋盒40设有垃圾袋出口;上述任一种可能实施例中的垃圾袋封口装置10,垃圾袋封口装置10安装在底盘20上且位于垃圾仓30和垃圾袋盒40之间,垃圾袋封口装置10的通孔100与垃圾袋入口和垃圾袋出口连通。
64.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。