技术特征:
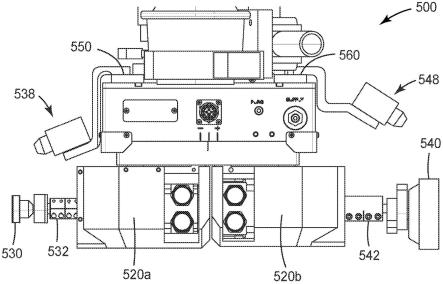
1.一种双安装端部执行器系统,所述端部执行器系统安装在动力机械臂上以准备物体表面,所述端部执行器系统包括:第一工具,所述第一工具被构造成接触并准备所述物体表面;第二工具,所述第二工具被构造成接触并准备所述物体表面;力控制件;并且其中所述力控制件被构造成在第一状态下与位于接触并准备所述物体表面的位置的所述第一工具对准,并且在第二状态下与位于接触并准备所述物体表面的位置的所述第二工具对准。2.根据权利要求1所述的系统,其中所述第一工具具有第一马达,所述第一马达被构造成当所述系统处于第一位置时操作所述第一工具,并且其中所述第二工具具有第二马达,所述第二马达被构造成当所述系统处于第二位置时操作所述第二工具。3.根据权利要求2所述的系统,其中所述第一马达和所述第二马达安装到所述力控制件。4.根据权利要求3所述的系统,其中所述第一马达和所述第二马达进行首尾安装,使得所述第一工具和所述第二工具相隔约180
°
。5.根据权利要求1至4中任一项所述的系统,其中所述第一工具选自由以下项组成的组:砂磨机、抛光机、打磨机、喷洒器、流体施加器或流体去除工具。6.根据权利要求1至5中任一项所述的系统,其中所述第一工具和所述第二工具是相同的。7.根据权利要求1至6中任一项所述的系统,其中所述第一工具和所述第二工具是不同的。8.根据权利要求1至7中任一项所述的系统,并且所述系统还包括:第三工具,所述第三工具被构造成接触并准备所述物体表面;第四工具,所述第四工具被构造成接触并准备所述物体表面;并且其中所述第三工具被构造成在所述端部执行器系统处于第三位置时操作,并且其中所述第四工具被构造成在所述端部执行器系统处于第四位置时操作。9.根据权利要求8所述的系统,其中所述系统还包括联接到第三马达的第二力控制件,所述第三马达被构造成操作所述第三工具,并且其中所述第二力控制件联接到第四马达,所述第四马达被构造成操作所述第四工具。10.据权利要求2至9中任一项所述的系统,其中所述第一工具通过第一联接器与所述第一马达联接,所述第一联接器在第一端上可拆卸地联接到所述第一马达的主轴。11.根据权利要求10所述的系统,其中所述第一联接器在第二端上可拆卸地联接到所述第一工具。12.根据权利要求1至11中任一项所述的系统,其中所述第一工具选自由以下项组成的组:砂磨机、抛光机、打磨机、擦拭器。13.根据权利要求1至12中任一项所述的系统,并且所述系统还包括:一个或多个传感器,所述传感器被构造成在所述功能部件接触并准备所述物体表面时检测所述端部执行器工具的工作状态;和控制电路,所述控制电路用于从所述传感器接收信号并处理所述信号,以生成所述端
部执行器工具的状态信息。14.根据权利要求13所述的系统,其中所述传感器包括用于获得位置数据的线性位置传感器、用于获得压力数据的压力传感器和用于获得表面标测数据的传感器中的至少一者。15.根据权利要求1至14中任一项所述的系统,所述系统还包括安装接口以将所述端部执行器系统功能性地连接到所述动力机械臂。16.根据权利要求1至15中任一项所述的系统,所述系统还包括喷嘴,所述喷嘴被构造成将流体分配到所述物体表面上。17.根据权利要求16所述的系统,其中所述流体选自由以下项组成的组:水、表面活性剂或抛光剂。18.根据权利要求13至17中任一项所述的系统,其中所述控制电路包括通信部件以在所述控制电路和所述动力机械臂的控制系统之间传送信号。19.一种自动化表面准备系统,所述自动化表面准备系统包括:根据权利要求1至18中任一项所述的端部执行器系统;动力机械臂;并且其中所述系统安装在所述动力机械臂上。20.根据权利要求19所述的系统,其中所述动力机械臂还包括微处理器以执行机器人控制系统。21.根据权利要求1至20中任一项所述的系统,其中所述动力机械臂是汽车修复机器人,并且其中所述第一工具被构造成接触并研磨所述表面。22.根据权利要求21所述的系统,其中研磨所述表面包括所述第一工具从所述表面去除材料层,并且其中所述材料层是所述表面上的涂料、底漆、电泳漆或清漆的层。23.一种使用表面准备系统来准备物体表面的方法,所述方法包括:检测处于第一位置的端部执行器系统,其中所述端部执行器系统包括第一工具和第二工具,并且其中在第一位置,所述第一工具与所述物体表面对准;接收需要第二工具来准备所述物体表面的输入;致动所述端部执行器系统的移动机构,其中致动包括所述移动机构使所述第二工具与所述物体表面对准;验证所述第二工具的位置;以及其中检测、接收、致动和验证的步骤由所述端部执行器系统响应于由与所述端部执行器系统相关联的处理器生成的指令来执行。24.根据权利要求23所述的方法,其中所述第一工具包括第一马达,并且所述第二工具包括第二马达,并且其中所述第一马达和所述第二马达安装到所述力控制件。25.根据权利要求24所述的方法,其中所述第一马达和所述第二马达相隔180
°
进行安装。26.根据权利要求23至24中任一项所述的方法,其中所述端部执行器系统安装到动力机械臂。27.根据权利要求26所述的方法,其中所述处理器与所述动力机械臂相关联。28.根据权利要求27所述的方法,其中所述第一工具、所述第二工具和所述力控制件相
对于彼此固定,并且其中所述移动机构是所述动力机械臂的一部分。29.根据权利要求28所述的方法,其中所述移动机构是所述动力机械臂内的板,并且其中使所述第二工具对准包括旋转所述板直到所述第二工具就位。30.根据权利要求23至29中任一项所述的方法,其中接收输入包括从控制器接收指令,其中所述指令包括端部执行器系统位置,并且其中所述端部执行器系统位置是所述第一位置或所述第二位置。31.根据权利要求30所述的系统,其中所述动力机械臂还包括微处理器以执行机器人控制系统。32.根据权利要求23至31中任一项所述的方法,其中所述端部执行器系统还包括:第三工具,所述第三工具被构造成接触并准备所述物体表面;第四工具,所述第四工具被构造成接触并准备所述物体表面;并且其中所述第三工具被构造成在所述端部执行器系统处于第三位置时操作,并且其中所述第四工具被构造成在所述端部执行器系统处于第四位置时操作。33.根据权利要求32所述的方法,其中所述系统还包括联接到第三马达的第二力控制件,所述第三马达被构造成操作所述第三工具,并且其中所述第二力控制件联接到第四马达,所述第四马达被构造成操作所述第四工具。34.据权利要求33所述的方法,其中所述第一工具通过第一联接器与所述第一马达联接,所述第一联接器在第一端上可拆卸地联接到所述第一马达的主轴。35.根据权利要求34所述的方法,其中所述第一联接器在第二端上可拆卸地联接到所述第一工具。36.根据权利要求23至35中任一项所述的方法,其中所述第一工具选自由以下项组成的组:砂磨机、抛光机、打磨机、擦拭器。37.根据权利要求36所述的方法,其中所述第二工具与所述第一工具相同。38.根据权利要求36所述的方法,其中所述第二工具是与所述第一工具不同的工具。39.根据权利要求23至38中任一项所述的方法,并且所述方法还包括:一个或多个传感器,所述一个或多个传感器被构造成在所述功能部件接触并准备所述物体表面时检测所述端部执行器工具的工作状态;和控制电路,所述控制电路用于从所述传感器接收信号并处理所述信号,以生成所述端部执行器工具的状态信息。40.根据权利要求39所述的方法,其中所述传感器包括用于获得所述位置数据的线性距离传感器、用于获得所述压力数据的压力传感器和用于获得所述表面标测数据的传感器中的至少一者。41.根据权利要求23至40中任一项所述的方法,所述方法还包括安装接口以将所述端部执行器系统功能性地连接到所述动力机械臂。42.根据权利要求23至40中任一项所述的方法,并且所述方法还包括使用与所述第二工具相关联的喷嘴来将流体分配到所述物体表面上。43.根据权利要求42所述的方法,其中所述流体选自由以下项组成的组:水、表面活性剂或抛光剂。
技术总结
描述了一种双安装端部执行器系统,该端部执行器系统安装在动力机械臂上以准备物体表面。该系统包括被构造成接触并准备该物体表面的第一工具以及被构造成接触并准备该物体表面的第二工具。该系统还包括力控制件。该力控制件被构造成在第一状态下与位于接触并准备该物体表面的位置的该第一工具对准,并且在第二状态下与位于接触并准备该物体表面的位置的该第二工具对准。的该第二工具对准。的该第二工具对准。
技术研发人员:阿龙
受保护的技术使用者:3M创新有限公司
技术研发日:2020.11.24
技术公布日:2022/7/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。