1.本发明涉及机器人系统。
背景技术:
2.近年来,因工厂人工费高涨、人才不足而通过各种机器人、该机器人周边设备加速了一直由人工进行的作业的自动化。例如,专利文献1所记载的机器人具备机器人臂、内置有对机器人臂进行驱动的编码器的多个电机、分别连接于各电机的伺服驱动器、对朝各伺服驱动器的通电条件进行控制的控制器、和监视各电机的工作的速度监视器。
3.此外,在专利文献1中,速度监视器通过专用的布线分别与各伺服驱动器连接。此外,控制器通过布线与各伺服驱动器中的一个连接,且以使各伺服驱动器分别为串联连接的方式而通过多个布线连接。
4.专利文献1:日本特开2002-354859号公报
5.然而,在专利文献1的结构中,由于速度监视器与各伺服驱动器通过专用的布线分别连接,因此布线的根数变多。进一步,在专利文献1的结构中,到控制器以及速度监视器获取完各电机的位置信息为止,需要花费时间。
技术实现要素:
6.本发明的机器人系统,其特征在于,具备:机器人臂,具有第一臂及第二臂、检测所述第一臂的位置的第一位置检测部以及检测所述第二臂的位置的第二位置检测部;驱动控制部,基于所述第一位置检测部以及所述第二位置检测部所输出的位置信息来控制所述机器人臂的驱动;监视部,基于所述位置信息来判断所述机器人臂的工作是否正常;第一通信线,分别连接所述驱动控制部及所述第一位置检测部、和所述驱动控制部及所述第二位置检测部,进行半双工通信;以及第二通信线,分别连接所述监视部及所述驱动控制部、所述监视部及所述第一位置检测部、以及所述监视部及所述第二位置检测部,进行半双工通信,所述驱动控制部在时间上重叠地进行经由所述第一通信线的与所述第一位置检测部的第一通信、和经由所述第二通信线的与所述第二位置检测部的第二通信。
附图说明
7.图1是本发明的机器人系统的第一实施方式的概略结构图。
8.图2是图1所示的机器人系统的功能框图。
9.图3是图1所示的编码器的功能框图。
10.图4是图1所示的驱动控制部以及监视部的功能框图。
11.图5是用于说明图1所示的编码器、驱动控制部以及监视部的连接方式的图。
12.图6是示出图1所示的编码器、驱动控制部以及监视部的通信定时的时序图。
13.图7是用于说明本发明的机器人系统的第二实施方式具备的编码器、驱动控制部以及监视部的连接方式的图。
14.图8是图7所示的编码器的功能框图。
15.图9是图7所示的驱动控制部以及监视部的功能框图。
16.图10是示出图7所示的编码器、驱动控制部以及监视部的通信定时的时序图。
17.图11是用于说明本发明的机器人系统的第三实施方式具备的编码器、驱动控制部以及监视部的连接方式的图。
18.图12是示出本发明的机器人系统的第四实施方式具备的编码器、驱动控制部以及监视部的通信定时的时序图。
19.附图标记说明
20.2:机器人;3:示教装置;4:驱动单元;5:驱动单元;6:u驱动单元;7:z驱动单元;8a:驱动控制部;8b:监视部;9a:第一编码器;9b:第二编码器;9c:第三编码器;9d:第四编码器;10a:第一通信线;10b:第二通信线;10c:第三通信线;20:机器人臂;21:基台;22:臂;23:臂;24:臂;25:末端执行器;26:力检测部;31:处理器;32:存储部;33:通信部;34:显示部;41:电机;42:减速器;51:电机;52:减速器;61:电机;62:减速器;71:电机;72:减速器;91:控制部;91a:控制部;92:控制部;92a:i/o接口;93:检测部;93a:i/o接口;94:i/o接口;94a:连接器;95:i/o接口;96:i/o接口;97:i/o接口;98:连接器;99:连接器;100:机器人系统;101a:总线;101b:总线;101c:总线;102a:布线;102b:布线;102c:布线;103a:布线;103b:布线;103c:布线;104a:布线;104b:布线;104c:布线;105a:布线;105b:布线;105c:布线;106a:布线;106b:布线;106c:布线;107b:布线;107c:布线;220:壳体;230:壳体;241:轴;811:控制部;812:控制部;813:逆变器;814:电源电路;815:i/o接口;816:i/o接口;817:i/o接口;818:i/o接口;819:连接器;820:连接器;821:连接器;822:控制部;823:控制部;824:电源监视电路;825:电源切断电路;826:i/o接口;827:i/o接口;828:连接器;836:连接器;837:i/o接口;o1:第一轴;o2:第二轴;o3:第三轴;tcp:控制点。
具体实施方式
21.以下,基于附图所示的优选的实施方式对本发明的机器人系统详细进行说明。
22.第一实施方式
23.图1是本发明的机器人系统的第一实施方式的概略结构图。图2是图1所示的机器人系统的功能框图。图3是图1所示的编码器的功能框图。
24.图4是图1所示的驱动控制部以及监视部的功能框图。图5是用于说明图1所示的编码器、驱动控制部以及监视部的连接方式的图。图6是示出图1所示的编码器、驱动控制部以及监视部的通信定时的时序图。
25.此外,在图1中,为了便于说明,作为相互正交的三个轴,图示出x轴、y轴以及z轴。此外,在以下,将与x轴平行的方向也称为“x轴方向”,将与y轴平行的方向也称为“y轴方向”,将与z轴平行的方向也称为“z轴方向”。此外,将绕z轴的方向以及绕与z轴平行的轴的方向也称为“u方向”。
26.此外,在以下,为了便于说明,将图1中的z轴的箭头的前端侧、即上侧也称为“上”或“上方”,将基端侧、即下侧也称为“下”或“下方”。此外,对于机器人臂20,将图1中的基台21侧称为“基端”,将其相反侧、即末端执行器25侧称为“前端”。此外,将图1中的z轴方向、即上下方向作为“铅垂方向”,将x轴方向以及y轴方向作为“水平方向”。
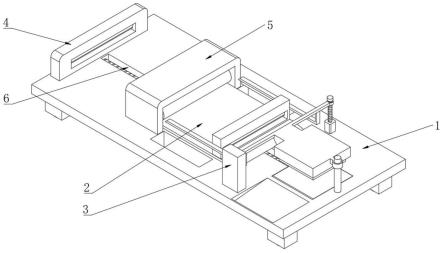
27.图1以及图2所示的机器人系统100例如是在电子部件以及电子设备等工件的保持、传送、组装以及检查等作业中所使用的装置。机器人系统100具备机器人2和对机器人2示教动作程序的示教装置3。
28.首先,对机器人2进行说明。
29.机器人2在图示的结构中是水平多关节机器人、即scara机器人。如图1所示,机器人2具有基台21、连接于基台21的机器人臂20、末端执行器25、力检测部26和控制这些各部分的工作的驱动控制部8a。
30.基台21是支承机器人臂20的部分。在基台21内置有后述的驱动控制部8a。此外,在基台21的任意部分设定有机器人坐标系的原点。另外,图1所示的x轴、y轴以及z轴是机器人坐标系的轴。
31.机器人臂20具备臂22、臂23和作为作业头的臂24。
32.另外,机器人2并不限定于图示的结构,臂的数量也可以是两个,还可以是四个以上。
33.此外,机器人2具备使臂22相对于基台21旋转的驱动单元4、使臂23相对于臂22旋转的驱动单元5、使臂24的轴241相对于臂23旋转的u驱动单元6、和使轴241相对于臂23在z轴方向上移动的z驱动单元7。
34.如图1以及图2所示,驱动单元4内置于臂22的壳体220内,具有产生驱动力的电机41、对电机41的驱动力进行减速的减速器42、和检测电机41或减速器42的旋转轴的旋转量的第一编码器9a。在此,旋转量意思是一个旋转内的自基准位置起的角度以及转数的任一方或两方。
35.驱动单元5内置于臂23的壳体230,具有产生驱动力的电机51、对电机51的驱动力进行减速的减速器52、和检测电机51或减速器52的旋转轴的旋转量的第二编码器9b。
36.u驱动单元6内置于臂23的壳体230,具有产生驱动力的电机61、对电机61的驱动力进行减速的减速器62、和检测电机61或减速器62的旋转轴的旋转量的第三编码器9c。
37.z驱动单元7内置于臂23的壳体230,具有产生驱动力的电机71、对电机71的驱动力进行减速的减速器72、和检测电机71或减速器72的旋转轴的旋转量的第四编码器9d。
38.作为电机41、电机51、电机61以及电机71,例如能够使用ac伺服电机、dc伺服电机等伺服电机。电机41、电机51、电机61以及电机71分别连接于对应的、未图示的电机驱动器,经由电机驱动器而被驱动控制部8a控制。
39.此外,作为减速器42、减速器52、减速器62以及减速器72,例如能够使用行星齿轮型的减速器、波动齿轮装置等。
40.基台21例如通过螺栓等经由力检测部26而固定于未图示的地面。臂22连结于基台21的上端部。臂22相对于基台21能够绕沿着铅垂方向的第一轴o1旋转。当使臂22旋转的驱动单元4进行驱动时,臂22相对于基台21绕第一轴o1在水平面内旋转。此外,在该旋转时,通过第一编码器9a,能够检测臂22相对于基台21的旋转量。
41.此外,臂23连结于臂22的前端部。臂23相对于臂22能够绕沿着铅垂方向的第二轴o2旋转。第一轴o1的轴方向与第二轴o2的轴方向相同。即第二轴o2与第一轴o1平行。当使臂23旋转的驱动单元5进行驱动时,臂23相对于臂22绕第二轴o2在水平面内旋转。在该旋转时,通过第二编码器9b,能够检测臂23相对于臂22的旋转量。
42.此外,臂24设置、支承于臂23的前端部。臂24具有轴241。轴241相对于臂23能够绕沿着铅垂方向的第三轴o3旋转,且能够在上下方向上移动。该轴241是机器人臂20的最前端的臂。
43.当使轴241旋转的u驱动单元6进行驱动时,轴241绕z轴旋转。在该旋转时,通过第三编码器9c,能够检测轴241相对于臂23的旋转量。
44.此外,当使轴241在z轴方向上移动的z驱动单元7进行驱动时,轴241在上下方向、即z轴方向上移动。在该移动时,通过第四编码器9d,能够检测轴241相对于臂23的z轴方向的移动量。
45.此外,在机器人2中,将轴241的前端作为控制点tcp,设定以该控制点tcp为原点的前端坐标系。此外,该前端坐标系与上述的机器人坐标系校准完毕,能够将前端坐标系中的位置转换到机器人坐标系。由此,能够在机器人坐标系中确定控制点tcp的位置。
46.此外,各种末端执行器能够装卸地连结于轴241的前端部。作为末端执行器,并不特别限定,例如可列举对被传送物进行把持的末端执行器、对被加工物进行加工的末端执行器、用于检查的末端执行器等。在本实施方式中,能够装卸地连结有末端执行器25。
47.另外,在本实施方式中,末端执行器25并非为机器人2的结构要素,但末端执行器25的一部分或全部也可以为机器人2的结构要素。
48.如图1所示,力检测部26检测施加于机器人2的力、即施加于机器人臂20以及基台21的力。在本实施方式中,力检测部26设置在基台21的下方、即z轴负方向上,从下方支承基台21。
49.力检测部26例如由水晶等压电体构成,能够构成为具有当受到外力时会输出电荷的多个元件。此外,驱动控制部8a能够根据该电荷量而转换为机器人臂20受到的外力的值。此外,当是这样的压电体时,能够根据设置的朝向而对受到外力时能够使电荷产生的朝向进行调整。
50.接下来,对第一编码器9a~第四编码器9d进行说明。
51.另外,由于除了对旋转量进行检测的对象的电机不同以外,第一编码器9a~第四编码器9d是同样的结构,因此,以下,对第一编码器9a代表性地进行说明。
52.如图3所示,第一编码器9a具备控制部91、控制部92、检测部93、i/o接口94、i/o接口95、i/o接口96、i/o接口97、连接器98和连接器99。
53.控制部91以及控制部92具有处理器和存储器。处理器例如由cpu(central processing unit:中央处理器)构成,能够读入并执行存储于存储器的各种程序等。存储器保存处理器能够执行的各种程序等。作为存储器,例如可列举ram(random access memory:随机存取存储器)等易失性存储器、rom(read only memory:只读存储器)等非易失性存储器、具有易失区域和非易失区域的存储器等。
54.检测部93例如具有连接于电机41的旋转轴的未图示的标尺、和读取标尺的旋转的未图示的光学元件。检测部93将与标尺的旋转量相对应的信号向控制部91以及控制部92输出。另外,检测部93中的检测方式不管是光学式、磁式等都行。
55.此外,在本实施方式中,检测部93将不同的检测方式下的检测结果向控制部91以及控制部92输出。由此,能够提高第一编码器9a~第四编码器9d的可靠性。
56.控制部91以及控制部92接收从检测部93所输出的信号,算出电机41的旋转量。该
算出结果是臂22的位置信息。
57.i/o接口94经由第一通信线10a而与驱动控制部8a进行通信,接收请求信号,并向控制部91输入。请求信号是驱动控制部8a输出的、请求位置信号的信号。
58.i/o接口95经由第一通信线10a而与驱动控制部8a进行通信,将从控制部91所输出的响应信号、即位置信号作为输出信号向驱动控制部8a发送。
59.i/o接口96经由第二通信线10b而与监视部8b进行通信,接收请求信号,并向控制部92输入。
60.i/o接口97经由第二通信线10b而与监视部8b进行通信,将从控制部92所输出的响应信号、即位置信号作为输出信号向监视部8b发送。
61.i/o接口94~i/o接口97与驱动控制部8a或监视部8b进行分组通信。该通信方式是串行通信。即,第一通信线10a以及第二通信线10b进行半双工通信,其中,该半双工通信分时地进行收发。由此,第一通信线10a以及第二通信线10b与进行并行通信的结构相比,能够减少第一通信线10a以及第二通信线10b的布线数量。
62.连接器98是连接第一通信线10a的连接部。此外,连接器98被设为与进行串行通信的布线对应的标准。
63.连接器99是连接第二通信线10b的连接部。此外,连接器99被设为与进行串行通信的布线对应的标准。
64.接下来,对驱动控制部8a进行说明。
65.如图4所示,驱动控制部8a基于从第一编码器9a~第四编码器9d接收到的位置信息来控制机器人臂20的工作。具体而言,具有控制部811、控制部812、逆变器813、电源电路814、i/o接口815、i/o接口816、i/o接口817、i/o接口818、连接器819、连接器820和连接器821。
66.控制部811以及控制部812分别具有处理器和存储器。处理器例如由cpu构成,能够读入并执行存储于存储器的各种程序等。存储器保存处理器能够执行的各种程序等。
67.控制部811进行臂22~臂24的位置控制以及速度控制。即,生成、输出请求信号,并接收响应信号。控制部811将接收到的响应信号向控制部812输出。
68.控制部812例如基于从示教装置3所输入的示教信息而生成机器人臂22的路径规划以及机器人臂20的轨道。而且,控制部812基于从控制部811所输入的各臂位置信息和存储于存储器的程序来决定如何使臂22~臂24移动到目标位置以及以多大程度的速度进行驱动,并将与该位置指令以及速度指令相关的信号向控制部811输出。
69.而且,控制部811基于所输入的位置指令以及速度指令,通过逆变器813将从电源电路814供给的电力转换为交流,并对朝电机41、电机51、电机61以及电机71的通电条件进行控制。
70.另外,控制部812将与位置指令以及速度指令相关的信号向控制部811输出,并且向监视部8b输出。
71.i/o接口815经由第一通信线10a而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,并分别发送请求位置信息的请求信号。另外,i/o接口815发送的请求信号由控制部811生成,是请求第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9向驱动控制部8a以及监视部8b发送位置信息的信号。
72.i/o接口816经由第一通信线10a而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,接收位置信息的响应信号,并向控制部811输出。
73.i/o接口817经由第二通信线10b而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,分别发送请求位置信息的请求信号。
74.i/o接口818经由第二通信线10b而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,接收位置信息的响应信号,并向控制部811输出。
75.连接器819是连接第一通信线10a的连接部。此外,连接器819被设为与进行串行通信的布线对应的标准。
76.连接器820是连接第二通信线10b的连接部。此外,连接器820被设为与进行串行通信的布线对应的标准。
77.连接器812是具有多个端口的连接部,其中,该多个端口连接朝电机的信号线、电力线等。
78.如图1以及图2所示,在本实施方式中,驱动控制部8a内置于基台21。只是,并不限定于该结构,也可以是设置于基台21的外侧的任意位置的结构。
79.接下来,对监视部8b进行说明。
80.如图4所示,监视部8b具有判断从第一编码器9a~第四编码器9d接收到的位置信息是否正常的功能。监视部8b具有控制部822、控制部823、电源监视电路824、电源切断电路825、i/o接口826、i/o接口827和连接器828。
81.控制部822以及控制部823分别具有处理器和存储器。处理器例如由cpu构成,能够读入并执行存储于存储器的各种程序等。存储器保存处理器能够执行的各种程序等。
82.控制部822基于经由i/o接口826接收到的位置信息来计算控制点tcp的位置以及控制点tcp的速度。此外,控制部822判断经由i/o接口826接收到的位置信息、和从驱动控制部8a的控制部812所输入的位置指令的信息是否一致。即,控制部822基于对各臂22~臂24的位置指令,来判断各臂22~臂24是否按指令那样进行了移动。在判断为不一致的情况下,视为机器人的工作不正常,对电源切断电路825发送指令以停止对机器人臂20的电力的供给。此外,控制部822判断算出的控制点tcp的速度是否在规定速度以下。在判定为控制点tcp的速度超过了规定速度的情况下,视为机器人的工作不正常,对电源切断电路825发送指令以停止对机器人臂20的电力的供给。
83.这样,在监视部8b判断为机器人臂20的工作不正常的情况下,使机器人臂20的工作停止。由此,能够提高安全性。
84.控制部823基于经由i/o接口827接收到的位置信息来计算控制点tcp的位置以及控制点tcp的速度。此外,控制部823判断经由i/o接口827接收到的位置信息和从驱动控制部8a的控制部812所输入的位置指令的信息是否一致。该判断以及这之后的控制动作与控制部822是同样的。此外,两个控制部822以及控制部823相互进行是否正常的监视。
85.这样,通过两个控制部822以及控制部823来监视机器人臂20的工作是否正常。由此,能够提高使机器人2工作时的安全性。
86.电源监视电路824判断从电源供给的电力是否正常。电源监视电路824在判断为从电源供给的电力不正常的情况下,对电源切断电路825发送指令以停止对机器人臂20的电力的供给。由此,能够防止向机器人臂20的各部分例如供给过多的电力。因此,能够提高使
机器人2工作时的安全性。
87.i/o接口826经由第二通信线10b而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,接收位置信息的响应信号,并向控制部822输出。
88.i/o接口827经由第二通信线10b而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,接收位置信息的响应信号,并向控制部823输出。
89.连接器828是连接第二通信线10b的连接部。此外,连接器828被设为与进行串行通信的布线对应的标准。
90.接下来,对示教装置3进行说明。
91.如图1以及图2所示,示教装置3具有对机器人臂20的工作进行控制的功能,具有处理器31、存储部32、通信部33和显示部34。作为示教装置3,并不特别限定,例如可列举平板、个人计算机、智能手机等。
92.处理器31由cpu等构成,读出并执行存储于存储部32的示教程序等各种程序。另外,示教程序可以由示教装置3生成,例如也可以从cd-rom等外部记录介质而被存储,还可以经由网络等而被存储。
93.由处理器31生成的信号经由通信部33而向机器人2的驱动控制部8a发送。由此,机器人臂20能够在规定的条件下执行规定的作业。此外,处理器31对图1所示的显示部34的驱动进行控制。
94.存储部32保存处理器31能够执行的各种程序等。作为存储部32,例如可列举ram等易失性存储器、rom(read only memory)等非易失性存储器、装卸式的外部存储装置等。
95.通信部33例如使用有线lan、无线lan等外部接口而在与驱动控制部8a之间进行信号的收发。
96.显示部34由具有显示画面的各种显示器构成。在本实施方式中,作为一例,对作为触摸面板式、即显示部34具备显示功能和输入操作功能的结构进行说明。当操作者触碰显示画面时,处理器31进行切换到规定的显示的控制。
97.只是,并不限定于这样的结构,也可以是另行具备输入操作部的结构。在该情况下,作为输入操作部,例如可列举鼠标、键盘等。此外,也可以是并用触摸面板和鼠标、键盘的结构。
98.在此,如图5所示,第一编码器9a~第四编码器9d、驱动控制部8a以及监视部8b分别通过第一通信线10a以及第二通信线10b连接。第一通信线10a具有总线101a、和连接于总线101a的布线102a、布线103a、布线104a、布线105a及布线106a。第二通信线10b具有总线101b、和连接于总线101b的布线102b、布线103b、布线104b、布线105b、布线106b及布线107b。
99.布线102a连接总线101a和驱动控制部8a。布线103a连接总线101a和第一编码器9a。布线104a连接总线101a和第二编码器9b。布线105a连接总线101a和第三编码器9c。布线106a连接总线101a和第四编码器9d。
100.布线102b连接总线101b和驱动控制部8a。布线103b连接总线101b和第一编码器9a。布线104b连接总线101b和第二编码器9b。布线105b连接总线101b和第三编码器9c。布线106b连接总线101b和第四编码器9d。布线107b连接总线101b和监视部8b。
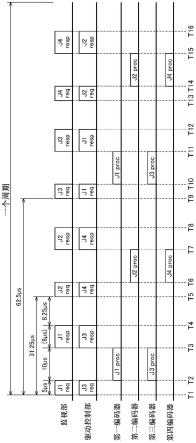
101.接下来,使用图6所示的时序图,参照图5,对第一编码器9a~第四编码器9d、驱动
控制部8a以及监视部8b的通信定时进行说明。另外,图6中“req”表示请求信号,“resp”表示响应信号。此外,监视部8b的时序图中的“req”实际上驱动控制部8a向编码器发送,请求向监视部8b发送响应信号,,但为了易于对说明进行理解,在监视部8b的时序图中示出。
102.此外,图6、图7、图10~图12中,“j1”表示第一编码器9a,“j2”表示第二编码器9b,“j3”表示第三编码器9c,“j4”表示第四编码器9d。此外,图6中,“proc”表示生成响应信号的处理。
103.首先,在时间t1处,驱动控制部8a经由第一通信线10a而对第三编码器9c开始进行请求位置信息的请求信号的发送。此外,在时间t1处,驱动控制部8a经由第二通信线10b而对第一编码器9a开始进行请求向监视部8b发送位置信息的请求信号的发送。开始发送请求信号到完成为止的所需时间例如是5μs左右。
104.接着,在时间t2处,完成对第一编码器9a以及第三编码器9c的请求信号的发送,第一编码器9a以及第三编码器9c开始进行与位置信息相关的信号的生成。而且,例如在10μs后的时间t3处,第一编码器9a开始进行对监视部8b的响应信号的发送,第三编码器9c开始进行对驱动控制部8a的响应信号的发送。
105.在时间t3处,监视部8b开始进行来自第一编码器9a的响应信号的接收,并且驱动控制部8a开始进行来自第三编码器9c的响应信号的接收。而且,例如在8μs后的时间t4处,分别完成接收。接收到的信息存储于存储器。
106.另外,在从时间t4起到执行下一个处理为止,例如经过8.25μs的时间。到此为止是控制周期中的1/4周期,其所需时间是31.25μs。在之后,每1/4周期的所需时间也是相同的,接收时间、发送时间、处理时间也与上述分别相同。
107.接着,在8.25μs后的时间t5处,驱动控制部8a经由第一通信线10a而对第四编码器9d开始进行请求位置信息的请求信号的发送。此外,在时间t5处,驱动控制部8a经由第二通信线10b而对第二编码器9b开始进行请求向监视部8b发送位置信息的请求信号的发送。
108.接着,在时间t6处,完成对第二编码器9b以及第四编码器9d的请求信号的发送,第二编码器9b以及第四编码器9d开始进行与位置信息相关的信号的生成。而且,在时间t7处,第二编码器9b开始进行对监视部8b的响应信号的发送,第四编码器9d开始进行对驱动控制部8a的响应信号的发送。而且,在时间t8处,分别完成接收。接收到的信息存储于存储器。
109.接着,在8.25μs后的时间t9处,驱动控制部8a经由第一通信线10a而对第一编码器9a开始进行请求位置信息的请求信号的发送。此外,在时间t9处,驱动控制部8a经由第二通信线10b而对第三编码器9c开始进行请求向监视部8b发送位置信息的请求信号的发送。
110.接着,在时间t10处,完成对第一编码器9a以及第三编码器9c的请求信号的发送,第一编码器9a以及第三编码器9c开始进行与位置信息相关的信号的生成。而且,在时间t11处,第三编码器9c开始进行对监视部8b的响应信号的发送,第一编码器9a开始进行对驱动控制部8a的响应信号的发送。而且,在时间t12处,分别完成接收。接收到的信息存储于存储器。
111.接着,在8.25μs后的时间t13处,驱动控制部8a经由第一通信线10a而对第二编码器9b开始进行请求位置信息的请求信号的发送。此外,在时间t13处,驱动控制部8a经由第二通信线10b而对第四编码器9d开始进行请求向监视部8b发送位置信息的请求信号的发送。
112.接着,在时间t14处,完成对第二编码器9b以及第四编码器9d的请求信号的发送,第二编码器9b以及第四编码器9d开始进行与位置信息相关的信号的生成。而且,在时间t15处,第二编码器9b开始进行对监视部8b的响应信号的发送,第四编码器9d开始进行对驱动控制部8a的响应信号的发送。而且,在时间t16处,分别完成接收。接收到的信息存储于存储器。
113.这样,驱动控制部8a经由第一通信线10a而分时地向第一编码器9a~第四编码器9d发送请求信号,并且经由第一通信线10a而分时地从第一编码器9a~第四编码器9d接收响应信号。此外,监视部8b经由第二通信线10b而分时地从第一编码器9a~第四编码器9d接收响应信号。即,驱动控制部8a、监视部8b以及第一编码器9a~第四编码器9d通过半双工通信而分别分时地进行通信。由此,能够抑制第一通信线10a以及第二通信线10b的布线数量增加。
114.此外,驱动控制部8a在全部接收完来自第一编码器9a~第四编码器9d的响应信号之后,即、当过了控制周期中的一个周期时,基于各响应信号来算出机器人臂20的位置以及姿势,并输出下一个指令。通过反复进行这样的控制,从而机器人臂20能够进行期望的动作。
115.此外,监视部8b在全部接收完来自第一编码器9a~第四编码器9d的响应信号之后,即、当过了控制周期中的一个周期时,如上述那样,基于各响应信号来算出控制点tcp的速度并判断速度是否在规定速度以下,并且判断各臂22~臂24是否按指令那样进行了移动。通过反复进行这样的控制,从而能够确保机器人臂20的安全性。
116.此外,如上述那样,在机器人系统100中,在驱动控制部8a与第三编码器9c进行通信时,监视部8b与第一编码器9a进行通信,在驱动控制部8a与第四编码器9d进行通信时,监视部8b与第二编码器9b进行通信,在驱动控制部8a与第一编码器9a进行通信时,监视部8b与第三编码器9c进行通信,在驱动控制部8a与第三编码器9c进行通信时,监视部8b与第一编码器9a进行通信。
117.此外,如上述那样,在本实施方式中,驱动控制部8a在时间上重叠地同时进行如下通信:经由第一通信线10a而对第三编码器9c发送请求位置信息的请求信号;以及经由第二通信线10b而对第一编码器9a发送请求向监视部8b发送位置信息的请求信息。
118.此外,驱动控制部8a同时进行如下通信:经由第一通信线10a而对第四编码器9d发送请求位置信息的请求信号;以及经由第二通信线10b而对第二编码器9b发送请求向监视部8b发送位置信息的请求信息。
119.此外,驱动控制部8a同时进行如下通信:经由第一通信线10a而对第一编码器9a发送请求位置信息的请求信号;以及经由第二通信线10b而对第三编码器9c发送请求向监视部8b发送位置信息的请求信息。
120.此外,驱动控制部8a同时进行如下通信:经由第一通信线10a而对第二编码器9b发送请求位置信息的请求信号;以及经由第二通信线10b而对第四编码器9d发送请求向监视部8b发送位置信息的请求信息。
121.这样,在将驱动控制部8a经由第一通信线10a进行的通信作为第一通信,将驱动控制部8a经由第二通信线10b进行的通信作为第二通信时,驱动控制部8a在时间上重叠地进行第一通信和第二通信。由此,与第一通信和第二通信在时间上重叠相应地,能够使到驱动
控制部8a以及监视部8b获取完第一编码器9a~第四编码器9d的全部位置信息为止的所需时间缩短。特别是,在本发明中,是如下结构:为了减少布线数量,驱动控制部8a、监视部8b以及第一编码器9a~第四编码器9d通过半双工通信而分别分时地进行通信。在这样的结构的情况下,在分别分时地进行了驱动控制部8a及第一编码器9a~第四编码器9d的通信、和监视部8b及第一编码器9a~第四编码器9d的通信的情况下,到驱动控制部8a以及监视部8b获取完第一编码器9a~第四编码器9d的全部位置信息为止的所需时间变得比较长。与此相对,在本发明中,尽管通过半双工通信减少了布线数量,但是通过在时间上重叠地进行第一通信和第二通信,从而能够使到驱动控制部8a以及监视部8b获取完第一编码器9a~第四编码器9d的全部位置信息为止的所需时间缩短。通过以上,根据本发明,能够兼顾布线数量的降低和通信时间的缩短。
122.此外,第一通信的开始时间和第二通信的开始时间一致,且第一通信的结束时间和第二通信的结束时间一致。由此,能够更有效地缩短通信时间。
123.另外,在上述中,对第一通信以及第二通信的开始时间一致且第一通信以及第二通信的结束时间一致的情况进行了说明,但在本发明中并不限定于此,只要第一通信以及第二通信的即使一部分在时间上重叠,则开始时间以及结束时间中的一方或双方也可以错开。
124.此外,第一通信和第二通信的控制周期错开半周期。具体而言,如图6所示,在时间t1~时间t9为止的期间,即、在控制周期的半周期的期间,监视部8b与第一编码器9a以及第二编码器9b进行通信,驱动控制部8a与第三编码器9c以及第四编码器9d进行通信。根据这样的结构,通过共享驱动控制部8a以及监视部8b接收到的位置信息,从而在控制周期的半周期的期间,能够获取第一编码器9a~第四编码器9d的位置信息。其结果,能够更准确地驱动机器人臂20,并且能够更提高对安全性进行监视的频率。
125.另外,在本实施方式中,控制周期是以往的控制周期的两倍。在将多个编码器的信号分时地多路复用的情况下,编码器的数量被通信周期和通信频带限制。因此,通过将控制周期设为两倍,从而能够确保通信所需要的时间,增加编码器的数量。
126.如以上所说明的那样,本发明的机器人系统100具备:机器人臂20,其具有第一臂以及第二臂;第一位置检测部,其检测第一臂的位置;第二位置检测部,其检测第二臂的位置;驱动控制部8a,其基于第一位置检测部以及第二位置检测部所输出的位置信息来控制机器人臂20的驱动;监视部8b,其基于所述位置信息来判断机器人臂20的工作是否正常;第一通信线10a,其分别连接驱动控制部8a及第一位置检测部、和驱动控制部8a及第二位置检测部,进行半双工通信;以及第二通信线10b,其分别连接监视部8b及驱动控制部8a、监视部8b及第一位置检测部、和监视部8b及第二位置检测部,进行半双工通信,驱动控制部8a在时间上重叠地进行经由第一通信线10a的与第一位置检测部的第一通信、和经由第二通信线10b的与第二位置检测部的第二通信。另外,上述“第一臂”以及上述“第二臂”能够应用臂22~臂24中的任意两个,上述“第一位置检测部”以及上述“第二位置检测部”能够应用对第一编码器9a~第四编码器9d中由“第一臂”以及“第二臂”选择出的臂的位置进行检测的检测部。
127.根据这样的结构,由于第一通信线10a以及第二通信线10b进行半双工通信,因此能够减少布线数量。此外,虽然通过半双工通信减少了布线数量,但是通过在时间上重叠地
进行第一通信和第二通信,从而能够使到驱动控制部8a以及监视部8b获取完第一位置检测部以及第二位置检测的双方的位置信息为止的所需时间缩短。通过以上,根据本发明,能够兼顾布线数量的降低和通信时间的缩短。
128.第二实施方式
129.图7是用于说明本发明的机器人系统的第二实施方式具备的编码器、驱动控制部以及监视部的连接方式的图。图8是图7所示的编码器的功能框图。图9是图7所示的驱动控制部以及监视部的功能框图。图10是示出图7所示的编码器、驱动控制部以及监视部的通信定时的时序图。
130.以下,参照图7~图10,对本发明的机器人系统的第二实施方式进行说明,但以与上述的实施方式的不同点为中心进行说明,而对同样的事项省略其说明。
131.如图7所示,机器人系统100具有第三通信线10c。第一编码器9a~第四编码器9d、驱动控制部8a以及监视部8b分别通过第三通信线10c连接。第三通信线10c具有总线101c、和连接于总线101c的布线102c、布线103c、布线104c、布线105c、布线106c及布线107c。
132.布线102c连接总线101c和驱动控制部8a。布线103c连接总线101c和第一编码器9a。布线104c连接总线101c和第二编码器9b。布线105c连接总线101c和第三编码器9c。布线106c连接总线101c和第四编码器9d。布线107c连接总线101c和监视部8b。
133.此外,除了具备在第一实施方式中所描述的结构之外,第一编码器9a进一步具备控制部91a、i/o接口92a、i/o接口93a和连接器94a。
134.控制部91a具有处理器和存储器。处理器例如由cpu(central processing unit)构成,能够读入并执行存储于存储器的各种程序等。存储器保存处理器能够执行的各种程序等。作为存储器,例如可列举ram(random access memory)等易失性存储器、rom(read only memory)等非易失性存储器、具有易失区域和非易失区域的存储器等。
135.控制部91a接收从检测部93所输出的信号,算出电机41的旋转量。
136.i/o接口92a经由第三通信线10c而与监视部8b进行通信,接收请求信号,并向控制部91a输入。
137.i/o接口93a经由第三通信线10c而与监视部8b进行通信,发送从控制部91a所输出的响应信号、即位置信号。
138.连接器94a是连接第三通信线10c的连接部。此外,连接器94a被设为与进行串行通信的布线对应的标准。
139.上述结构关于第二编码器9b~第四编码器9d也是同样的。
140.此外,除了具备在第一实施方式中所描述的结构之外,驱动控制部8a进一步具备连接器836和i/o接口837。
141.连接器836是连接第二通信线10b的连接部。此外,连接器836被设为与进行串行通信的布线对应的标准。
142.i/o接口837经由第二通信线10b而与第一编码器9a、第二编码器9b、第三编码器9c以及第四编码器9d进行通信,分别发送请求位置信息的请求信号。
143.此外,除了具有在第一实施方式中所描述的结构之外,监视部8b进一步具有连接器836。连接器836是连接第二通信线10b的连接部。此外,连接器836被设为与进行串行通信的布线对应的标准。
144.此外,监视部8b对从第二通信线10b接收到的位置信息和从第三通信线10c接收到的位置信息进行比较。而且,只要它们不一致,则视为第一编码器9a~第四编码器9d的任一方发生了故障。由此,能够进一步提高可靠性。
145.此外,如图10所示,监视部8b使用第二通信线10b与第一编码器9a~第四编码器9d进行通信的定时、和使用第三通信线10c与第一编码器9a~第四编码器9d进行通信的定时一致。
146.这样,在本实施方式中,第一编码器9a~第四编码器9d以及监视部8b分别通过第二通信线10b以及第三通信线10c连接。即,将连接第一编码器9a~第四编码器9d以及监视部8b的布线进行双工。
147.另外,第一编码器9a~第四编码器9d以及监视部8b分别通过两根通信线连接,也可以说是将第二通信线10b进行双工。通过将第二通信线进行双工,从而即使一方的通信线发生了断线,也能够使用另一方的通信线进行通信,进行在所述第一实施方式中所描述的那样的控制。因此,能够进一步提高可靠性。
148.第三实施方式
149.图11是用于说明本发明的机器人系统的第三实施方式具备的编码器、驱动控制部以及监视部的连接方式的图。
150.以下,参照图11,对本发明的机器人系统的第三实施方式进行说明,但以与上述的实施方式的不同点为中心进行说明,而对同样的事项省略其说明。
151.如图11所示,在本实施方式中,仅第一通信线10a连接于第四编码器9d,而省略第二通信线10b以及第三通信线10c的连接。
152.这样,机器人2具备:作为第三臂的臂24,其位于比作为第一臂的臂22以及作为第二臂的臂23更靠指尖侧;以及第三位置检测部,其检测臂24的位置,仅第一通信线10a以及第二通信线10b中的一方连接于第三位置检测部,在图示的结构中,仅连接第一通信线10a。另外,上述“第二位置检测部”能够应用第三编码器9c或第四编码器9d的任一方。根据这样的结构,能够进一步减少布线根数。特别是,与臂22以及臂23相比,由于指尖侧的臂24的可动范围较小,因此位置精度也可以稍微低。此外,与臂22以及臂23相比,指尖侧的臂24的内部的空间变窄。因此,通过减少与臂24相关的布线,从而能够尽可能地抑制机器人臂20的位置精度的降低,并减少布线根数,能够使指尖侧的臂24小型。
153.此外,将第二通信线10b进行双工,第一通信线10a连接于第三位置检测部。这样,通过省略被进行了双工的第二通信线10b与第三位置检测部的连接,从而能够进一步有效地减少布线根数。
154.第四实施方式
155.图12是示出本发明的机器人系统的第四实施方式具备的编码器、驱动控制部以及监视部的通信定时的时序图。
156.在本实施方式中,虽然未图示,但机器人2是六轴机器人。即,具备第一臂、第二臂、第三臂、第四臂、第五臂、第六臂、检测第一臂的位置的第一位置检测部、检测第二臂的位置的第二位置检测部、检测第三臂的位置的第三位置检测部、检测第四臂的位置的第四位置检测部、检测第五臂的位置的第五位置检测部、和检测第六臂的位置的第六位置检测部。
157.此外,以如图12所示的那样的定时进行驱动控制部8a、监视部8b以及第一位置检
测部~第六位置检测部的通信。另外,图12中,“j1”表示第一位置检测部,“j2”表示第二位置检测部,“j3”表示第三位置检测部,“j4”表示第四位置检测部,“j5”表示第五位置检测部,“j6”表示第六位置检测部。
158.在监视部8b与第一位置检测部进行通信时,驱动控制部8a与第四位置检测部进行通信。在监视部8b与第二位置检测部进行通信时,驱动控制部8a与第五位置检测部进行通信。在监视部8b与第三位置检测部进行通信时,驱动控制部8a与第六位置检测部进行通信。在监视部8b与第四位置检测部进行通信时,驱动控制部8a与第一位置检测部进行通信。在监视部8b与第五位置检测部进行通信时,驱动控制部8a与第二位置检测部进行通信。在监视部8b与第六位置检测部进行通信时,驱动控制部8a与第四位置检测部进行通信。
159.此外,驱动控制部8a依次进行对第四位置检测部的请求信号的发送、来自第三位置检测部的响应信号的接收、对第五位置检测部的请求信号的发送、来自第四位置检测部的响应信号的接收、对第六位置检测部的请求信号的发送、来自第五位置检测部的响应信号的接收、对第一位置检测部的请求信号的发送、来自第六位置检测部的响应信号的接收、对第二位置检测部的请求信号的发送、来自第一位置检测部的响应信号的接收、对第三位置检测部的请求信号的发送、以及来自第二位置检测部的响应信号的接收。
160.这样,根据本发明,在六轴机器人中也能够减少布线数量并实现与第一位置检测部~第六位置检测部的通信时间的缩短。特别是,由于对不同的位置检测部反复进行请求信号的发送以及响应信号的接收,因此在需要延长生成响应信号的处理时间的情况下,能够进一步有效地实现通信时间的缩短。
161.以上,基于图示的实施方式对本发明的机器人系统进行了说明,但本发明并不限定于此,各部分的结构能够置换为具有同样的功能的任意结构。此外,也可以在机器人系统中附加其他任意结构物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。