1.本公开涉及再生制动器的控制方法以及机器人系统。
背景技术:
2.以往,在机器人中,存在有如下技术:除了基于电磁制动器的机械制动以外,还进行基于驱动机器人的电机的再生制动。使电机作为发电机发挥功能的情况下的制动力是根据此时的电机的旋转速度来决定的。在专利文献1的技术中,在紧急停止动作中速度指令成为零的时间点,执行再生制动和伺服电源断开。通过进行这样的处理,能够减少相对于目标位置的过冲量。
3.专利文献1:日本特开2017-24137号公报
4.但是,在专利文献1中,没有提及在伺服电机以通常的旋转速度进行动作的情况下控制再生制动的制动力的方法。
技术实现要素:
5.根据本公开的一个方式,提供一种机器人系统。该机器人系统具备:一个以上的组合,所述组合包括驱动部、可动部、检测部、电阻设备以及开关;以及控制部,控制所述机器人系统,所述驱动部接受电力供给而生成输出轴的旋转输出,并且接受向所述输出轴的旋转力的供给而生成电力,所述可动部通过所述旋转输出而移动,所述检测部检测所述输出轴的角度位置,所述电阻设备具有电阻,并且与所述驱动部连接,所述开关能够进行所述电阻设备与所述驱动部的连接的接通以及断开。所述控制部能够执行第一制动控制,所述第一制动控制是如下的制动控制:以未进行电力供给的所述驱动部为对象,基于所述检测部的输出来计算所述驱动部的所述旋转输出的速度,在根据针对所述驱动部预先决定的目标减速度和所述旋转输出的所述速度而按时间序列决定的时间点,使所述开关进行所述电阻设备与所述驱动部的连接的接通以及断开。
附图说明
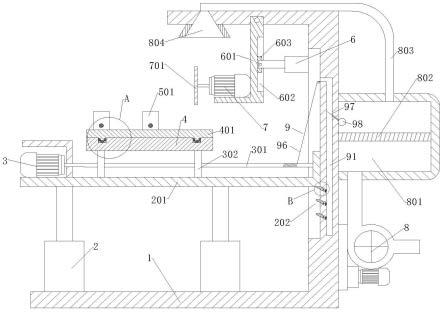
6.图1是表示本实施方式所涉及的机器人系统50的整体结构的说明图。
7.图2是表示电机单元1的结构的说明图。
8.图3是表示与电机11连接的电气结构的框图。
9.图4是表示控制装置52的主要功能部的框图。
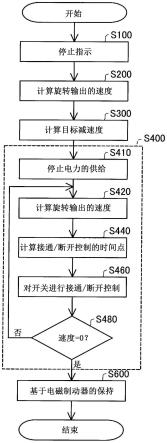
10.图5是表示存在有使机器人51的动作停止的停止指示的情况下的控制装置52的处理的流程图。
11.图6是表示控制装置52将再生制动器设为接通的时间以及设为断开的时间的图表。
12.图7是表示按照图6反复进行再生制动器的接通和断开的情况下的、与电机11连接的电阻的大小的图表。
13.图8是表示按照图6反复进行再生制动器的接通和断开的情况下的、基于电机11的制动力的大小的图表。
14.图9是表示步骤s460中的控制装置52的主要功能部的关系的框图。
15.图10是表示在第二实施方式的机器人系统50b中与电机11连接的电结构的框图。
16.图11是表示在第二实施方式中使机器人51的动作停止的情况下的控制装置52的处理的流程图。
17.图12是按时间序列表示发生了瞬间停电的情况下的输出轴12的电机角速度的大小和速度指令所示出的角速度的大小的图表。
18.附图标记说明
[0019]1…
电机单元;3
…
电机板;3a
…
轴孔;11
…
电机;12
…
输出轴;15
…
编码器;21
…
电磁制动器;31
…
带轮;40
…
动作指令部;41
…
位置控制器;42
…
速度控制器;43
…
电流控制器;44
…
电机驱动器;45
…
电磁制动器控制部;46
…
再生制动器控制部;50
…
机器人系统;50b
…
机器人系统;51
…
机器人;52
…
控制装置;53
…
基台;54
…
臂构件;54a
…
旋转轴;55
…
臂构件;55a
…
旋转轴;56
…
臂构件;56a
…
旋转轴;57
…
臂构件;57a
…
旋转轴;58
…
臂构件;58a
…
旋转轴;59
…
臂构件;59a
…
旋转轴;81
…
商用电源;82
…
第一整流器;83
…
逆变器;84
…
电阻器;84b
…
二次电池;85
…
第二整流器;86
…
开关;87
…
电子设备;88
…
设备保护部;cr
…
再生电力电路;g0
…
表示速度指令所示出的角速度的大小的图表;g0r
…
表示修正后的速度指令所示出的角速度的大小的图表;g1
…
表示输出轴12的实际的电机角速度的大小的图表;j1
…
关节;j2
…
关节;jn
…
关节;v0
…
角速度的值;t0
…
瞬间停电的开始时刻;t1
…
瞬间停电的结束时刻;t2
…
角速度恢复到v0的时刻。
具体实施方式
[0020]
a.第一实施方式:
[0021]
图1是表示本实施方式所涉及的机器人系统50的整体结构的说明图。机器人系统50具备机器人51和控制装置52。
[0022]
机器人51是所谓的垂直多关节机器人。机器人51具备基台53和臂构件54、55、56、57、58、59。虽然在图1中未示出,但是机器人51还具备逆变器83、电阻器84以及开关86。
[0023]
基台53支撑构成机器人51的其他构件。通过将基台53固定于地面,机器人51被设置于地面上。
[0024]
臂构件54在一端被基台53支撑。臂构件54能够以与设置面大致垂直的旋转轴54a为中心,相对于基台53在规定的角度范围内旋转。臂构件55的另一端与臂构件55连接。臂构件55在一端与臂构件54连接。臂构件55能够以与旋转轴54a垂直的旋转轴55a为中心,相对于臂构件54在规定的角度范围内旋转。臂构件55的另一端与臂构件56连接。臂构件56在一端与臂构件55连接。臂构件56能够以与旋转轴55a大致平行的旋转轴56a为中心,相对于臂构件55在规定的角度范围内旋转。臂构件56的另一端与臂构件57连接。
[0025]
臂构件57在一端与臂构件56连接。臂构件57能够以与旋转轴56a垂直的旋转轴57a为中心,相对于臂构件56在规定的角度范围内旋转。臂构件57的另一端与臂构件58连接。臂构件58在一端与臂构件57连接。臂构件58能够以与旋转轴57a垂直的旋转轴58a为中心,相对于臂构件57在规定的角度范围内旋转。臂构件58的另一端与臂构件59连接。
[0026]
臂构件59在一端与臂构件58连接。臂构件59能够以与旋转轴58a垂直的旋转轴59a为中心,相对于臂构件58在规定的角度范围内旋转。在臂构件59的另一端安装有末端执行器。末端执行器能够保持作为机器人51的作业的对象物的工件。机器人51的控制点例如设定在臂构件59的旋转轴59a上、且与臂构件59相距规定距离的位置。此外,为了容易地理解技术,在图1中省略末端执行器的显示。
[0027]
臂构件54与基台53的连接部分构成扭转关节。臂构件55与臂构件54的连接部分构成弯曲关节。臂构件56与臂构件55的连接部分构成弯曲关节。臂构件57与臂构件56的连接部分构成扭转关节。臂构件58与臂构件57的连接部分构成弯曲关节。臂构件59与臂构件58的连接部分构成扭转关节。旋转轴58a、56a、55a相互平行。
[0028]
在各臂构件的连接部分、即机器人51的关节处分别设有电机单元1。通过电机单元1所具备的电机11的输出轴12的旋转输出而使臂构件54、55、56、57、58、59移动。通过使臂构件54、55、56、57、58、59移动,经由关节相互连接的两个臂构件的相对角度发生改变。其结果是,安装于臂构件59的末端执行器以任意的姿态配置于三维空间的任意的位置。关于电机单元1的结构,在后面进行说明。
[0029]
控制装置52控制机器人系统50。控制装置52通过电缆与机器人51连接为能够通信。控制装置52具备作为处理器的cpu、ram以及rom。ram包括主存储器和辅助存储装置。控制装置52的cpu通过将存储于辅助存储装置的计算机程序加载到主存储器并执行而使机器人动作。
[0030]
控制装置52针对机器人51的控制点的控制,能够进行ptp控制(point to point control,点位控制)和cp控制(continuous path control,连续轨迹控制)。ptp控制是仅指定作为目标的位置和姿态而不指定到达作为目标的位置为止的动作路径的控制。cp控制是沿动作路径指定位置和姿态的控制。
[0031]
图2是表示电机单元1的结构的说明图。电机单元1具备电机11、编码器15、电磁制动器21、带轮31以及电机板3。
[0032]
电机板3是用于将电机单元1固定于机器人51的构件。在电机板3上固定有电机11和电磁制动器21。电机板3具备轴孔3a。
[0033]
电机11具备输出轴12。电机11接受电力供给而生成输出轴12的旋转输出。另外,电机11接受朝向输出轴12的旋转力的供给而生成电力。电机11固定于电机板3。输出轴12贯通电机板3的轴孔3a。
[0034]
带轮31经由减速器与电机11的输出轴12连接。带轮31通过电机11的输出轴12而旋转。带轮31的旋转经由带传递至臂构件,使臂构件移动。另外,带轮31在未向连接有带轮31的电机11供给电力的状态下,传递由臂构件的动作引起的旋转力,并将该旋转力向输出轴12供给。其结果是,电机11作为发电机发挥功能。
[0035]
编码器15检测电机11的输出轴12的角度位置。编码器15在相对于电机11与电机板3相反的一侧固定于电机11。
[0036]
电磁制动器21在相对于电机板3与电机11相反的一侧固定于电机板3。电磁制动器21在未向电磁制动器21供给电力的状态下,将静止的输出轴12保持为不能旋转。具体而言,电磁制动器21利用基于弹簧的弹力相对于与输出轴12连接的构件按压可动构件,从而利用可动构件与该构件之间的摩擦力将输出轴12保持为不能旋转。在向电磁制动器21供给有电
力的状态下,电磁制动器21使输出轴12能够旋转。具体而言,电磁制动器21通过被供给电力而克服基于弹簧的弹力,使可动构件从与输出轴12连接的构件离开。其结果是,输出轴12能够旋转。
[0037]
图3是表示与电机11连接的电气结构的框图。逆变器83与电机11和商用电源81连接。逆变器83对从商用电源81供给的交流电力的频率以及电压进行转换,并向电机11供给。在机器人51中,相对于驱动一个关节的一个电机11,设有一个逆变器83。
[0038]
电阻器84具有电阻。电阻器84被供给电力而发热。电阻器84经由开关86与电机11连接。开关86进行电阻器84与电机11的连接的接通以及断开。
[0039]
与一个关节jn相对应地设有电机11、通过该电机11的旋转输出而移动的臂构件、编码器15、电磁制动器21以及开关86的一个组合(参照图2以及图3)。即,在机器人系统50中,设有电机11、通过该电机11的旋转输出而移动的臂构件、编码器15、电磁制动器21以及开关86的六个组合。在图3中,用虚线包围并表示与一个关节jn相对应的结构。
[0040]
在机器人系统50中,与六个关节jn相对应的六组电机11以及逆变器83相互并联地与商用电源81连接。
[0041]
在机器人系统50中,与六个关节jn相对应的六组电机11以及开关86相互并联地与电阻器84连接。即,与六个关节jn相对应的、电机11、臂构件、编码器15以及开关86的六个组合共用一个电阻器84(参照图2以及图3)。在功能上,能够掌握为与一个关节jn相对应地设有电机11、开关86、逆变器83以及电阻器84的一个组合。
[0042]
图4是表示控制装置52的主要功能部的框图。控制装置52具备动作指令部40、电磁制动器控制部45以及再生制动器控制部46。
[0043]
动作指令部40受理位置指令,根据位置指令控制电机11的动作。动作指令部40具备位置控制器41、速度控制器42、电流控制器43以及电机驱动器44。
[0044]
位置控制器41基于输入到位置控制器41的位置指令与从编码器15输入的输出轴12的角度位置的差值,生成速度指令。
[0045]
速度控制器42根据从位置控制器41输入的速度指令和电机11的旋转输出的速度即电机角速度,计算输出轴12的目标旋转速度,生成与该目标旋转速度相对应的电流指令。电机角速度是以编码器15的输出为基础的。更具体而言,电机角速度是通过对由编码器15检测出的输出轴12的角度位置进行微分而获得的。
[0046]
电流控制器43对从速度控制器42输入的电流指令与从电机驱动器44输入的电机11的驱动电流的差值进行比例控制以及积分控制,并以将与电流指令相应的电流向电机11供给的方式控制电机驱动器44。
[0047]
电机驱动器44包括逆变器83以及开关86来作为结构构件(参照图3)。电机驱动器44向电机11供给电流,从而对电机11进行驱动。电机驱动器44在不向电机11供给电流的状态下,使电阻器84朝向电机11的连接接通以及断开。
[0048]
电磁制动器控制部45根据从动作指令部40输入的电磁制动器执行指令,使电磁制动器21工作(参照图4的下段)。电机11的输出轴12被电磁制动器21保持为不能旋转。
[0049]
再生制动器控制部46根据从位置控制器41输入的速度指令以及电机角速度,针对在未被供给电力的情况下接受了向输出轴12的旋转力的供给的电机11,经由电机驱动器44控制再生制动器的制动力(参照图4的上段右部)。
[0050]
图5是表示存在有使机器人51的动作停止的停止指示的情况下的控制装置52的处理的流程图。通过图5的处理,实现再生制动器的控制方法。停止指示例如是通过按下紧急停止按钮来发出的。
[0051]
在步骤s100中,控制装置52接收停止指示。
[0052]
在步骤s200中,控制装置52基于编码器15的输出,计算电机11的旋转输出的速度即电机角速度。电机角速度是通过对由编码器15检测出的输出轴12的角度位置进行微分而获得的。
[0053]
在步骤s300中,控制装置52针对各关节的电机11,以从当前的电机角速度起以不损伤与电机11连接的设备的减速度进行减速的方式决定电机11的目标减速度、目标角速度以及目标角度位置。目标减速度基于该关节之前的机器人51的臂的质量、机器人51所保持的工件的质量、末端执行器的质量等,被设定为与电机11连接的减速器等不会破损的数值。目标角速度以及目标角度位置是基于所设定的目标减速度来设定的。
[0054]
例如,为了在控制点存在于cp控制中指定的动作路径上的状态下使机器人51的动作停止,以使控制点沿指定的动作路径一边减速一边移动的方式决定各关节的电机11的目标减速度、目标角速度以及目标角度位置。其结果是,各关节的电机11分别以独自的减速度减速。
[0055]
在步骤s400中,控制装置52执行使电机11停止的停止处理。更具体而言,在步骤s400中,对机器人51的各电机11执行再生制动。
[0056]
在步骤s410中,控制装置52停止电力朝向电机11的供给。
[0057]
在步骤s420~s460中,在根据针对电机11在步骤s300中决定的目标减速度和电机11的旋转输出的速度而按时间序列决定的时间点,控制装置52使开关86接通以及断开电阻器84与电机11的连接。
[0058]
在步骤s420中,控制装置52基于编码器15的输出,计算电机11的旋转输出的速度即电机角速度。电机角速度是通过对由编码器15检测出的输出轴12的角度位置进行微分而获得的。
[0059]
在步骤s440中,控制装置52基于在步骤s300中决定的目标减速度和在步骤s420中获得的电机角速度,计算接下来将再生制动器设为接通的时间以及将再生制动器设为断开的时间,以实现目标减速度。
[0060]
在步骤s460中,控制装置52在步骤s230中获得的时间点,使开关86接通以及断开电阻器84与电机11的连接(参照图3)。
[0061]
在步骤s480中,控制装置52判定电机角速度是否处于包括0在内的规定的范围内。在电机角速度处于包括0在内的规定的范围内的情况下,处理进入步骤s600。在电机角速度未处于包括0在内的规定的范围内的情况下,处理返回到步骤s420。其结果是,反复进行再生制动器的接通和断开,直到电机角速度成为0附近为止。
[0062]
图6是表示控制装置52将再生制动器设为接通的时间以及设为断开的时间的图表。在图6的例子中可知,最初每单位时间的将再生制动器设为接通的时间的比例被设定得较大,之后,每单位时间的将再生制动器设为接通的时间的比例变小。在电机角速度恒定这样的前提下,在发挥较高的制动力的情况下,每单位时间的将再生制动器设为接通的时间的比例被设定得较大。在发挥较低的制动力的情况下,每单位时间的将再生制动器设为接
通的时间的比例被设定得较小。
[0063]
图7是表示按照图6反复进行再生制动器的接通和断开的情况下的、与电机11连接的电阻的大小的图表。电阻器84的电阻是恒定的(参照图3)。因此,图7的图表是与图6的图表相似的形状。
[0064]
图8是表示按照图6反复进行再生制动器的接通和断开的情况下的、基于电机11的制动力的大小的图表。电机角速度越低,则再生制动器接通时的制动力越小。另外,在从电阻器84与电机11连接起到产生制动力为止的期间、以及从电机11与电阻器84的连接被切断起到制动力完全消失为止的期间,产生时间延迟。其结果是,按照图6反复进行再生制动器的接通和断开的情况下的、基于电机11的制动力的大小变得如图8所示。在图8的例子中可知,最初制动力变大,之后制动力变小。通过这样控制制动力,能够使电机11顺畅地停止。
[0065]
通过进行图5的步骤s420~s460的处理,能够通过再生制动使臂构件54、55、56、57、58、59沿目标减速度减速。其结果是,能够防止与电机11连接的减速器等设备因再生制动而破损的情况。另外,根据本实施方式的结构,与进行电流控制来控制再生制动器的制动力的方式相比,能够以简单的结构控制再生制动器的制动力。
[0066]
图9是表示步骤s460中的控制装置52的主要功能部的关系的框图。具体而言,图5的步骤s420~s460的处理在控制装置52中如下这样进行。控制装置52根据在图5的步骤s300中计算出的目标角度位置来生成位置指令。位置控制器41基于所输入的位置指令与从编码器15输入的输出轴12的角度位置的差值,生成速度指令,并向再生制动器控制部46输入。
[0067]
再生制动器控制部46根据从位置控制器41输入的速度指令和电机角速度,计算接下来将再生制动器设为接通的时间以及将再生制动器设为断开的时间。然后,根据该计算结果来控制电机驱动器44。电机驱动器44根据来自再生制动器控制部46的指示使开关86接通以及断开(参照图3)。
[0068]
在图5的步骤s410中,停止电力朝向电机11的供给。因此,在图5的步骤s420~s460的处理中,再生制动器控制部46不进行向电机11供给的电流的控制。在图5的步骤s420~s460的处理中,速度控制器42以及电流控制器43不发挥功能。
[0069]
在图5的步骤s600中,电磁制动器控制部45使电磁制动器21工作(参照图9的下段)。其结果是,电机11的输出轴12被电磁制动器21保持为不能旋转。
[0070]
也将第一实施方式中的电机11称为“驱动部”。也将臂构件54、55、56、57、58、59称为“可动部”。也将编码器15称为“检测部”。也将电阻器84称为“电阻设备”。也将控制装置52称为“控制部”。也将对没有电力供给的电机11进行的步骤s400的处理称为“第一制动控制”。
[0071]
b.第二实施方式:
[0072]
作为电阻设备,第二实施方式的机器人系统50b具有二次电池84b来取代电阻器84。第二实施方式的机器人系统50b具有第二整流器85。进而,在第二实施方式的机器人系统50b中,使机器人51停止时的控制装置52的处理与第一实施方式的机器人系统50不同。第二实施方式的机器人系统50b的其他方面与第一实施方式的机器人系统50相同。
[0073]
图10是表示在第二实施方式的机器人系统50b中与电机11连接的电结构的框图。第二实施方式的机器人系统50b具有第一整流器82、电子设备87、设备保护部88、二次电池
84b以及第二整流器85。
[0074]
电子设备87是机器人系统50b所具备的结构,是被供给直流的电力而进行动作的设备。电子设备87包括控制装置52(参照图1)。
[0075]
第一整流器82与商用电源81和设备保护部88连接。第一整流器82将从商用电源81供给的交流电力变换为直流电力,经由设备保护部88向电子设备87供给。
[0076]
二次电池84b相对于设备保护部88与第一整流器82并联地连接。二次电池84b与第二整流器85连接。二次电池84b经由第二整流器85蓄积电机11所生成的电力。二次电池84b经由设备保护部88向电子设备87供给电力。具体而言,二次电池84b是锂离子电池。
[0077]
第二整流器85与二次电池84b连接。电机11以及逆变器83经由开关86并联地连接于第二整流器85。第二整流器85将电机11所生成的交流电力变换为直流电力,并向二次电池84b供给。
[0078]
将向电子设备87供给电机11所生成的电力的电路称为再生电力电路cr。在再生电力电路cr中设有开关86、第二整流器85、二次电池84b以及设备保护部88。
[0079]
设备保护部88与电子设备87连接。在设备保护部88并联地连接有第一整流器82以及二次电池84b。设备保护部88将从第一整流器82或者二次电池84b向电子设备87供给的电力的电压控制为预先决定的值以下。具体而言,设备保护部88是自恢复保险丝。
[0080]
通过设为这样的结构,能够在不使电子设备87因过电压而损伤的情况下经由二次电池84b活用电机11所生成的电力。
[0081]
在第一实施方式中省略了说明,但是在第一实施方式的机器人系统50中,也设有第一整流器82、设备保护部88以及电子设备87。
[0082]
与一个关节jn相对应地设有电机11、通过该电机11的旋转输出而移动的臂构件、编码器15、电磁制动器21、开关86、第二整流器85以及逆变器83的一个组合(参照图2以及图10)。即,在机器人系统50b中,设有电机11、通过该电机11的旋转输出而移动的臂构件、编码器15、电磁制动器21、开关86、第二整流器85以及逆变器83的六个组合。在图10中,用虚线包围并表示与一个关节jn相对应的结构。
[0083]
在机器人系统50b中,与六个关节jn相对应的六组电机11、开关86以及第二整流器85相互并联地与二次电池84b连接。即,与六个关节jn相对应的、电机11、臂构件、编码器15、开关86以及第二整流器85的六个组合共用一个二次电池84b(参照图2以及图10)。即,机器人系统50b具备经由二次电池84b将六个电机11相互连接的连接电路cc。在功能上,能够掌握为与一个关节jn相对应地设有电机11、开关86、逆变器83、第二整流器85以及二次电池84b的一个组合。
[0084]
作为电子设备87的控制装置52例如在由于停电而切断了电力朝向电机11的供给的情况下,也能够从二次电池84b接受电力供给而进行动作(参照图10的上段右部)。通过设为这样的结构,即使在电机11无法进行动作之后,控制装置52也能够利用蓄积于二次电池84b的电能来执行第一制动控制(参照图5的s400以及图11的s400)。因此,生成了旋转输出的电机11能够在不使减速机等与电机11连接的设备破损的情况下通过控制装置52而恰当地停止。
[0085]
图11是表示在第二实施方式中使机器人51的动作停止的情况下的控制装置52的处理的流程图。图11的处理在以下的情况下被执行。(i)在从商用电源81向机器人系统50b
供给电力的情况下。(ii)虽然未从商用电源81向机器人系统50b供给电力,但是在使各关节的电机11停止为止的期间,在二次电池84b中蓄积有能够向各关节的电机11供给驱动电力的电能的情况。关于在未从商用电源81向机器人系统50b供给电力、且在使各关节的电机11停止为止的期间,在二次电池84b中未蓄积有能够向各关节的电机11供给驱动电力的电能的情况下的处理,在后面进行说明。
[0086]
图11的步骤s100~s300的处理与图5的步骤s100~s300的处理相同。
[0087]
在第二实施方式中,能够针对与六个关节相对应的、电机11、通过该电机11的旋转输出而移动的臂构件、编码器15、电磁制动器21以及开关86的六个组合中的、与一部分关节相对应的组合,执行第一制动控制(参照图5的s400以及图11的s400)。然后,对于与另一部分关节相对应的组合,能够执行第二制动控制(参照图11的s500)。
[0088]
具体而言,对于在步骤s300中获得的目标减速度的绝对值比阈值更接近0的关节的电机11,在步骤s300的处理之后,执行步骤s400的处理。对于目标减速度的绝对值为阈值以上的关节的电机11,在步骤s300的处理之后,执行步骤s500的处理。将目标减速度的绝对值比阈值更接近0的一个以上的关节统称为“关节j1”。将目标减速度的绝对值为阈值以上的一个以上的关节统称为“关节j2”。能够将目标减速度的阈值设为能够通过再生制动器实现的减速度的上限、或者对该上限乘以小于1的系数所得的值。
[0089]
图11的步骤s400的处理与图5的步骤s400的处理相同。但是,作为步骤s400的处理的结果而获得的基于电机11的再生的电力经由二次电池84b向执行步骤s500的处理的电机11供给。
[0090]
在步骤s500中,再生制动器控制部46对于作为对象的关节j2的电机11,不停止电力供给(参照图5的s410)。从商用电源81或者二次电池84b朝向作为对象的电机11供给电力(参照图10的下段左部和中段中央部)。从关节j1的电机11向二次电池84b供给再生电力。其结果是,第二制动控制能够经由连接电路cc,利用由第一制动控制生成的电力来进行。
[0091]
再生制动器控制部46控制电机11,使得针对关节j2的电机11产生与在步骤s300中决定的目标减速度相应的大小的、与此前旋转输出反向的旋转力。反向的旋转力以实现在步骤s100中决定的目标减速度的方式按时间序列决定。控制装置52中的处理与在第一实施方式中使用图4说明的处理相同。在步骤s500中,若电机角速度成为0,则处理进入步骤s600。
[0092]
也将针对被供给有电力的电机11进行的步骤s500的处理称为“第二制动控制”。
[0093]
通过进行这样的处理,能够通过步骤s400的第一制动控制和步骤s500的第二制动控制分别恰当地控制六个关节的电机11,使机器人的臂构件54、55、56、57、58、59恰当地减速。更具体而言,对于目标减速度较大的关节j2,能够产生与此前的旋转输出反向的旋转力,进行沿目标减速度的减速。另外,能够将通过关节j1的电机11的第一制动控制获得的能量用于其他关节j2的电机11的第二制动控制。因此,能够提高机器人系统50b的能量效率。
[0094]
图11的步骤s600的处理与图5的步骤s600的处理相同。
[0095]
另一方面,在未从商用电源81向机器人系统50b供给电力、且在使各关节的电机11停止为止的期间,在二次电池84b中未蓄积有能够向各关节的电机11供给驱动电力的电能的情况下,不进行图11的处理。在该情况下,进行步骤s410以外的图5的处理。在该情况下执行的图5的各工序是在电力朝向电机11的供给被切断的情况下,控制装置52从二次电池84b
接受电力供给而控制机器人系统50b的工序。
[0096]
图12是按时间序列表示发生了瞬间停电的情况下的输出轴12的电机角速度的大小和速度指令所示出的角速度的大小的图表。在图12中,横轴是时间。在时刻t0发生停电,在时刻t1恢复电力供给。从时刻t0到时刻t1的经过时间为300毫秒~400毫秒。
[0097]
在图12中,用单点划线的图表g0表示本来的速度指令所示出的角速度的大小。本来的速度指令所示出的角速度的大小为恒定值v0。用实线的图表g1表示输出轴12的实际的电机角速度的大小。用双点划线的图表g0r表示修正后的速度指令所示出的角速度的大小。修正后的速度指令所示出的角速度的图表g0r与输出轴12的实际的电机角速度的图表g1一致。但是,为了容易理解技术,在图12中,错开显示图表g0r和图表g1。
[0098]
在针对机器人51的控制点的控制进行ptp控制时,在发生了瞬间停电的情况下,控制装置52进行以下的处理。
[0099]
在发生了停电的情况下,如上所述,作为电子设备87的控制装置52从二次电池84b接受电力供给而进行动作。另一方面,各关节的电机11因电力供给被切断而失去驱动力。其结果是,输出轴12的电机角速度g1在时刻t0以后从v0降低。
[0100]
例如,在机器人51与其他构造物接触而动作受到阻碍、输出轴12的电机角速度降低的情况下,在机器人系统50b中进行以下的处理。即,在输出轴12的电机角速度与本来的速度指令所示出的角速度v0之差为阈值以上的情况下,进行“错误停止”的处理,停止机器人51的动作。其结果是,能够减少或者防止机器人51或者其他构造物的损伤。之后,进行恢复处理。
[0101]
在本实施方式中,控制装置52在来自商用电源81的电力供给被切断的情况下,取代上述处理而进行以下的处理。即,控制装置52将速度指令从由图表g0表示的内容修正为由图表g0r表示的内容。即,控制装置52使从时刻t0到时刻t1为止的速度指令的内容与输出轴12的实际的电机角速度g1一致。该处理在时刻t0之后通过反复的处理而进行至时刻t1为止。其结果是,从时刻t0到时刻t1之间的、输出轴12的电机角速度与修正后的速度指令所示出的角速度之差为0。
[0102]
然后,控制装置52以如下方式修正电力供给恢复的时刻t1以后的速度指令的内容。即,以如下方式修正速度指令:从时刻t1的输出轴12的实际的电机角速度g1起增大,在时刻t2成为本来的速度指令所示出的角速度的大小v0。通过进行这样的处理,机器人51即使在发生了瞬间停电的情况下,也能够不进行错误停止地继续动作。
[0103]
也将第二实施方式中的二次电池84b称为“蓄电部”或者“电阻设备”。
[0104]
c.其他实施方式:
[0105]
c1.其他实施方式1:
[0106]
(1)在上述第一实施方式中,与六个关节jn相对应的、电机11、臂构件、编码器15以及开关86的六个的组合共用一个电阻器84(参照图2以及图3)。另外,在上述第二实施方式中,与六个关节jn相对应的、电机11、臂构件、编码器15、开关86以及第二整流器85的六个的组合共用一个二次电池84b(参照图2以及图10)。但是,电阻设备也可以针对各个组合各设置一个。例如,作为电阻设备,也可以与各关节相对应地设置电容器。
[0107]
另外,在上述实施方式中,在机器人系统50、50b中,设有与关节jn相对应的、电机11、臂构件、编码器15以及开关86的六个组合。但是,它们的组合可以设置一个,也可以设置
三个、四个等其他数量。但是,它们的组合优选设置多组。
[0108]
(2)作为电阻设备,上述第二实施方式的机器人系统50b具有二次电池84b来取代电阻器84(参照图3以及图10)。但是,作为电阻设备,机器人系统也可以具备电阻器和蓄电池这双方。另外,蓄电池可以是镍氢电池,也可以是电容器。
[0109]
(3)在上述实施方式中,以不损伤与电机11连接的设备的减速度进行减速的方式决定电机11的目标减速度(参照图5的s300以及图11的s300)。但是,例如,在将本公开的技术应用于amr(autonomous mobile robot:自主移动机器人)的情况下,能够将目标减速度设定为amr不会翻倒的值。
[0110]
(4)输出轴12的角度位置的检测也可以通过角度位置的变化量的检测来进行。另外,也能够应用能够检测输出轴12的绝对角度位置的检测部。
[0111]
(5)在上述第一实施方式中,对于电机角速度,说明了在图5的步骤s200、s420中进行的情况。但是,也可以采用始终获取电机角速度的方式。
[0112]
(6)在上述实施方式中,通过步骤s420~s460的反复的处理,按时间序列决定将再生制动器设为接通的时间点以及设为断开的时间点(参照图5以及图6)。但是,直到电机角速度成为0为止的、将再生制动器设为接通的时间点以及设为断开的时间点也能够不依赖于反复的处理,而是预先通过计算来决定。另外,电力朝向电机11的供给的停止也可以不在第一制动控制内,而是在第一制动控制以外进行(参照图5的s410)。
[0113]
(7)在上述第二实施方式中,电子设备87包括控制装置52(参照图1)。该电子设备87也可以包括其他设备。
[0114]
(8)在上述第二实施方式中,具体而言,设备保护部88是自恢复保险丝。但是,设备保护部88也可以是dc/dc整流器等其他结构。例如,设备保护部88也可以构成为,在向电子设备供给的电力的电压为阈值以上的情况下,将具备追加的电阻设备的其他电路与电子设备串联地连接,降低对电子设备施加的电压。
[0115]
(9)在上述第二实施方式中,根据目标减速度进行第一制动控制或者第二制动控制(参照图11)。但是,进行第一制动控制的对象和进行第二制动控制的对象也可以通过电机的角速度等其他参数来划分。
[0116]
c2.其他实施方式2:
[0117]
在上述第二实施方式中,机器人系统50b具备二次电池84b。而且,作为电子设备87的控制装置52能够从二次电池84b接受电力供给而进行动作(参照图10的上段右部)。但是,如第一实施方式那样,机器人系统也能够设为不具备二次电池84b的方式(参照图3)。
[0118]
c3.其他实施方式3:
[0119]
在上述第二实施方式中,对一部分关节执行第一制动控制,对另一部分关节执行第二制动控制(参照图11的s400、s500)。但是,也可以如第一实施方式那样,采用不执行第二制动控制的方式。
[0120]
c4.其他实施方式4:
[0121]
在上述第二实施方式中,在再生电力电路cr中设有设备保护部88。但是,也可以如第一实施方式那样采用不具备再生电力电路cr的方式。
[0122]
d.其他方式:
[0123]
本公开并不局限于上述实施方式,在不脱离其主旨的范围内能够以各种方式实
现。例如,本公开也能够通过以下的方式来实现。为了解决本公开的课题的一部分或者全部、或者为了实现本公开的效果的一部分或者全部,与以下记载的各方式中的技术特征相对应的上述实施方式中的技术特征能够适当地进行替换、组合。另外,该技术特征在本说明书中只要不是作为必须的特征进行说明,就能够适当删除。
[0124]
(1)根据本公开的一个方式,提供一种机器人系统。
[0125]
该机器人系统具备:一个以上的组合,所述组合包括驱动部、可动部、检测部、电阻设备以及开关;以及控制部,控制所述机器人系统,所述驱动部接受电力供给而生成输出轴的旋转输出,并且接受向所述输出轴的旋转力的供给而生成电力,所述可动部通过所述旋转输出而移动,所述检测部检测所述输出轴的角度位置,所述电阻设备具有电阻,并且与所述驱动部连接,所述开关能够进行所述电阻设备与所述驱动部的连接的接通以及断开。所述控制部能够执行第一制动控制,所述第一制动控制是如下的制动控制:以未进行电力供给的所述驱动部为对象,基于所述检测部的输出来计算所述驱动部的所述旋转输出的速度,在根据针对所述驱动部预先决定的目标减速度和所述旋转输出的所述速度而按时间序列决定的时间点,使所述开关进行所述电阻设备与所述驱动部的连接的接通以及断开。
[0126]
根据这样的方式,能够通过再生制动使可动部沿目标减速度减速。
[0127]
(2)在上述方式的机器人系统中,能够设为如下方式:作为所述电阻设备的至少一部分,所述机器人系统具备蓄积所述驱动部所生成的电力的蓄电部,在向所述驱动部的电力供给被切断的情况下,所述控制部能够从所述蓄电部接受电力供给而进行动作。
[0128]
根据这样的方式,即使在驱动部无法动作之后,控制部也能够利用蓄积于蓄电部的能量来执行第一制动控制。因此,驱动部被恰当地停止。
[0129]
(3)在上述方式的机器人系统中,能够设为如下方式:所述一个以上的组合是多个所述组合,所述机器人系统具备连接电路,所述连接电路将多个所述组合所包括的多个所述驱动部相互连接,所述控制部针对所述多个所述组合中的一个以上的所述组合能够执行所述第一制动控制,所述控制部针对所述多个所述组合中的其他一个以上的所述组合能够执行第二制动控制,所述第二制动控制是如下的制动控制:以被供给电力的所述驱动部为对象,通过所述连接电路,利用通过所述第一制动控制生成的电力控制所述驱动部,以产生与针对所述驱动部预先决定的目标减速度相应的大小且与所述旋转输出反向的旋转力。
[0130]
根据这样的方式,通过第一制动控制和第二制动控制分别恰当地控制多个驱动部,能够使机器人的多个可动部恰当地减速。另外,能够将通过某个驱动部的第一制动控制获得的能量用于其他驱动部的第二制动控制,因此能够提高机器人系统的能量效率。
[0131]
(4)在上述方式的机器人系统中,能够设为如下方式:所述机器人系统具备:再生电力电路,将所述驱动部所生成的电力向所述机器人系统所具备的电子设备供给;以及设备保护部,设于所述再生电力电路,能够将向所述电子设备供给的电力的电压控制为预先决定的值以下。
[0132]
根据这样的方式,能够在不损伤电子设备的情况下活用驱动部所生成的电力。
[0133]
(5)根据本公开的其他方式,提供一种机器人系统中的再生制动器的控制方法。上述机器人系统具备一个以上的组合,所述组合包括驱动部、可动部、检测部、电阻设备以及开关,所述驱动部接受电力供给而生成输出轴的旋转输出,并且接受向所述输出轴的旋转力的供给而生成电力,所述可动部通过所述旋转输出而移动,所述检测部检测所述输出轴
的角度位置,所述电阻设备具有电阻,并且与所述驱动部连接,所述开关能够进行所述电阻设备与所述驱动部的连接的接通以及断开。所述控制方法包括如下工序:执行以未进行电力供给的所述驱动部为对象的第一制动控制,基于所述检测部的输出来计算所述旋转输出的速度,在根据针对所述驱动部预先决定的目标减速度和所述旋转输出的所述速度而按时间序列决定的时间点,使所述开关进行所述电阻设备与所述驱动部的连接的接通以及断开。
[0134]
(6)在上述方式的控制方法中,能够设为如下方式:所述机器人系统具备:控制部,控制所述机器人系统;以及蓄电部,作为所述电阻设备的至少一部分,蓄积所述驱动部所生成的电力,所述控制方法包括如下工序:在向所述驱动部的电力供给被切断的情况下,所述控制部从所述蓄电部接受电力供给而控制所述机器人系统。
[0135]
(7)在上述方式的控制方法中,能够设为如下方式:所述一个以上的组合是多个所述组合,所述机器人系统具备连接电路,所述连接电路将多个所述组合所包括的多个所述驱动部相互连接,所述控制方法包括如下工序:针对所述多个所述组合中的一个以上的所述组合执行所述第一制动控制,针对所述多个所述组合中的其他一个以上的所述组合执行第二制动控制,所述第二制动控制是如下的制动控制:以被供给电力的所述驱动部为对象,通过所述连接电路,利用通过所述第一制动控制生成的电力控制所述驱动部,以产生与针对所述驱动部预先决定的目标减速度相应的大小且与所述旋转输出反向的旋转力。
[0136]
本公开也能够以再生制动器的控制方法、机器人系统以外的各种方式来实现。例如,能够以机器人的控制方法、机器人的运转方法、实现这些控制方法的计算机程序、记录有该计算机程序的非暂时性的记录介质等方式来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。