衬底处理系统及衬底处理方法
1.[相关申请的交叉引用]
[0002]
本技术对应于2020年12月28日向日本专利厅提出申请的特愿2020-219355号,本技术的全部揭示通过引用并入此文中。
技术领域
[0003]
本发明涉及一种处理衬底的衬底处理系统、及处理衬底的衬底处理方法。作为处理对象的衬底,例如包含半导体晶圆、液晶显示装置及有机el(electroluminescence,电致发光)显示装置等fpd(flat panel display,平板显示器)用衬底、光盘用衬底、磁盘用衬底、磁光盘用衬底、光罩用衬底、陶瓷衬底、太阳电池用衬底等。
背景技术:
[0004]
日本专利特开2018-56466号公报中揭示了一种衬底处理装置,其是利用ipa(异丙醇)对衬底的上表面即器件面进行处理之后,将衬底的下表面即非器件面洗净。
技术实现要素:
[0005]
在日本专利特开2018-56466号公报中,以非器件面朝向下侧的状态,将非器件面洗净。在非器件面的下侧配置着旋转基座等部件,因此将非器件面洗净的构件受到空间上的限制。
[0006]
为了缓和空间上的限制,可以考虑在非器件面朝向上侧的状态下将非器件面洗净,为此,必须在将衬底搬送到衬底处理装置之前,使衬底翻转。然而,该情况下会产生如下问题:用于衬底翻转的部件接触器件面,而导致器件面受到污染。
[0007]
对此,本发明的目的之一在于提供一种既可抑制衬底的保护对象面受到污染,又可将衬底的洗净对象面良好地洗净的衬底处理系统及衬底处理方法。
[0008]
本发明的一态样提供一种衬底处理系统,其具备:第1衬底保持单元,包含从下侧与具有保护对象面及所述保护对象面相反侧的洗净对象面的衬底对向的第1基座,将所述衬底以所述保护对象面朝向上侧的第1姿势保持;保护膜涂布喷嘴,对于由所述第1衬底保持单元保持的所述衬底的所述保护对象面,至少在周缘部涂布保护膜;第1翻转单元,与所述衬底的周缘部接触并使所述衬底翻转,以使得所述衬底的姿势从所述第1姿势变化为所述保护对象面朝向下侧的第2姿势;第2衬底保持单元,包含从下侧与所述衬底对向的第2基座,将所述衬底以所述第2姿势保持;以及洗净单元,将由所述第2衬底保持单元保持的所述衬底的所述洗净对象面洗净。
[0009]
根据该构成,使衬底翻转时,衬底的周缘部与第1翻转单元接触。因此,只要在保护对象面的至少周缘部涂布着保护膜的状态下使衬底翻转,就能够抑制因第1翻转单元的接触引起的污染,且能够使衬底的姿势变化为第2姿势。之后,能够在衬底的姿势为第2姿势的状态下,利用洗净单元将衬底的洗净对象面从上侧洗净。因此,可不受第2基座的空间上的限制,将洗净对象面良好地洗净。
[0010]
如上所述,能够抑制衬底的保护对象面受到污染,且能够将衬底的洗净对象面良好地洗净。此外,所谓污染是指例如微粒等污染物质附着。
[0011]
本发明的一态样中,所述第1衬底保持单元包含第1吸附保持单元,该第1吸附保持单元使所述洗净对象面的中央部吸附在所述第1基座,而保持所述衬底。因此,第1衬底保持单元可以在不设置与衬底的周缘部接触的部件的情况下,保持衬底。即,可以在衬底的保护对象面的周缘部附近不设置妨碍保护膜涂布的部件的情况下,涂布保护膜。因此,能实现提高针对保护对象面的周缘部的保护膜的均匀性。因此,能够进一步抑制衬底的保护对象面受到污染。
[0012]
本发明的一态样中,所述第2衬底保持单元包含多个夹盘销,这些夹盘销支撑在所述第2基座上,与所述衬底的所述保护对象面的周缘部接触而固持所述衬底。
[0013]
将洗净对象面洗净时,必须使第2基座吸附在衬底的保护对象面的中央部,或利用支撑在第2基座上的多个夹盘销来固持衬底的周缘部。即,洗净对象面的洗净是在使构成第2衬底保持单元的部件与衬底的保护对象面的至少一部分接触的状态下执行的。
[0014]
根据该衬底处理系统,由于在衬底的保护对象面的周缘部至少涂布着保护膜,所以能够在不使多个夹盘销与衬底的保护对象面的周缘部直接接触的情况下,利用多个夹盘销固持衬底的周缘部。因此,能够更确实地抑制因洗净时保持衬底而导致保护对象面受到污染。
[0015]
本发明的一态样中,所述保护膜涂布单元构成为在所述衬底的整个所述保护对象面涂布所述保护膜。而且,所述第2衬底保持单元包含第2吸附保持单元,该第2吸附保持单元使所述保护对象面的中央部吸附在所述第2基座而保持所述衬底。
[0016]
根据该构成,在衬底的整个保护对象面上涂布保护膜。因此,不使第2基座直接接触衬底的保护对象面的中央部,就能使保护膜的中央部吸附在第2基座上而保持衬底。因此,能够抑制因洗净时保持衬底而导致保护对象面受到污染。
[0017]
本发明的一态样中,所述洗净单元包含喷雾嘴,该喷雾嘴通过朝向所述洗净对象面喷射洗净液的液滴,而对所述洗净对象面执行喷雾洗净。
[0018]
根据该构成,通过从喷雾嘴朝向洗净对象面喷射洗净液的液滴,来进行喷雾洗净。因此,能利用因洗净液液滴的冲撞而产生的物理力,将洗净对象面有效地洗净。
[0019]
本发明的一态样中,所述洗净单元包含洗净部件,该洗净部件与所述衬底的所述洗净对象面接触,将所述洗净对象面刷洗洗净。
[0020]
根据该构成,通过使洗净部件与洗净对象面接触来进行刷洗洗净。因此,因刷洗洗净而从洗净对象面飞溅的污染物质会悬浮在气体氛围中。如果通过涂布保护膜来对保护对象面施以保护,就能抑制污染物质附着到保护对象面上。
[0021]
本发明的一态样中,所述衬底处理系统还具备:第2翻转单元,与所述衬底的周缘部接触并使所述衬底翻转,以使得所述衬底的姿势从所述第2姿势变化为所述第1姿势;第3衬底保持单元,包含从下侧与所述衬底对向的第3基座,将所述衬底以所述第1姿势保持;以及去除液喷嘴,将从所述保护对象面去除所述保护膜的去除液供给至由所述第3衬底保持单元保持的所述衬底的所述保护对象面。
[0022]
根据该构成,能够从上侧朝向衬底的保护对象面供给去除液。因此,与对朝向下侧的保护对象面供给去除液的构成相比,容易使去除液均匀地扩散至整个保护对象面。因此,
能够将保护膜从保护对象面良好地去除。
[0023]
本发明的一态样中,所述第1衬底保持单元兼作为所述第3衬底保持单元。因此,于由同一衬底保持单元(第1衬底保持单元)保持的状态下,进行保护膜的涂布及去除。因此,与为了去除保护膜而设置其它衬底保持单元的情况相比,能实现衬底处理系统的小型化。
[0024]
本发明的一态样中,所述衬底处理系统还具备:第2翻转单元,与所述衬底的周缘部接触并使所述衬底翻转,以使得所述衬底的姿势从所述第2姿势变化为所述第1姿势;第3衬底保持单元,包含从下侧与所述衬底对向的第3基座,将所述衬底以所述第1姿势保持;以及干式去除单元,通过对由所述第3衬底保持单元保持的所述衬底的所述保护对象面执行等离子体处理或光照射处理,而从所述保护对象面去除所述保护膜。
[0025]
根据该构成,通过执行等离子体处理或紫外线照射处理,无须对衬底供给液体,就能从保护对象面去除保护膜。因此,能够省去干燥衬底的工夫,能够抑制将保护对象面干燥时产生水印(干燥痕迹)。
[0026]
本发明的一态样中,所述衬底处理系统还具备气体供给单元,该气体供给单元对由所述第2衬底保持单元保持的所述衬底的所述保护对象面与所述第2基座之间的空间供给气体。根据该构成,由于对第2基座与保护对象面之间的空间供给气体,所以形成了从该空间流向该空间外部的气流。因此,能够抑制在洗净对象面的洗净中,在气体氛围中飞溅的污染物质流入第2基座与保护对象面之间的空间并附着在保护对象面上。因此,能够良好地保护衬底的保护对象面。
[0027]
本发明的一态样中,所述衬底处理系统还具备:收容器载置部件,载置将所述衬底以所述第1姿势收容的收容器;以及搬送单元,具有与所述衬底的所述洗净对象面及所述保护对象面中朝向下侧的面的周缘部接触的机械手,在所述收容器载置部件、所述第1衬底保持单元、所述第1翻转单元及所述第2衬底保持单元之间搬送所述衬底。
[0028]
根据该构成,通过搬送单元,能够将衬底从载置在收容器载置部件的收容器搬送到第1衬底保持单元。衬底以第1姿势收容在收容器中。因此,可不使从收容器搬出的衬底翻转,而以第1姿势将其保持在第1衬底保持单元上。
[0029]
另外,通过搬送单元,能够将衬底从第1衬底保持单元搬送到第1翻转单元。只要在对保护对象面涂布了保护膜之后,利用第1翻转单元使被搬送到第1翻转单元的衬底翻转,就能够抑制因第1翻转单元与衬底的周缘部接触而导致衬底的保护对象面受到污染,并且能够使衬底的姿势变化为第2姿势。之后,只要利用搬送单元将衬底从第1翻转单元搬送到第2衬底保持单元,就能够将衬底以第2姿势保持在第2衬底保持单元上,将洗净对象面洗净。
[0030]
本发明的另一态样提供一种衬底处理方法,该衬底处理方法包含:第1衬底保持工序,将具有保护对象面及所述保护对象面相反侧的洗净对象面的衬底,以所述保护对象面朝向上侧的第1姿势保持在从上侧与第1基座对向的第1保持位置;保护膜涂布工序,对于通过所述第1衬底保持工序,以所述第1姿势保持在所述第1保持位置的所述衬底的所述保护对象面,至少在周缘部涂布保护膜;第1翻转工序,在所述保护膜涂布工序之后,利用第1翻转单元与所述衬底的周缘部接触并使所述衬底翻转,以使得所述衬底的姿势从所述第1姿势变化为所述保护对象面朝向下侧的第2姿势;第2衬底保持工序,将通过所述第1翻转工序使姿势成为所述第2姿势的所述衬底,保持在从上侧与第2基座对向的第2保持位置;以及洗
净工序,对通过所述第2衬底保持工序以所述第2姿势保持在所述第2保持位置的所述衬底的所述洗净对象面执行洗净。
[0031]
根据该方法,发挥与所述衬底处理系统相同的效果。
[0032]
本发明的另一态样中,所述衬底处理方法包含:第2翻转工序,在所述洗净工序之后,利用第2翻转单元固持所述衬底的周缘部并使所述衬底翻转,以使得所述衬底的姿势从所述第2姿势变化为所述第1姿势;第3衬底保持工序,将通过所述第2翻转工序使姿势成为所述第1姿势的所述衬底保持在从上侧与第3基座对向的第3保持位置;以及保护膜去除工序,对通过所述第3衬底保持工序以所述第1姿势保持在所述第1保持位置的所述衬底供给去除液,由此去除所述保护膜。
[0033]
本发明的另一态样中,所述衬底处理方法包含:第2翻转工序,在所述洗净工序之后,使第2翻转单元与所述衬底的周缘部接触并使所述衬底翻转,以使得所述衬底的姿势从所述第2姿势变化为所述第1姿势;第3衬底保持工序,将所述衬底以所述第1姿势保持在从上侧与第3基座对向的第3保持位置;以及保护膜去除工序,对通过所述第3衬底保持工序以所述第1姿势保持在所述第3保持位置的所述衬底,执行等离子体处理或光照射处理,由此从所述保护对象面去除所述保护膜。
[0034]
本发明的所述目的或进而其它目的、特征及效果通过以下参照附图来叙述的实施方式的说明而明确。
附图说明
[0035]
图1a是用来说明本发明的第1实施方式的衬底处理系统所具备的衬底处理装置的构成的俯视图。
[0036]
图1b是用来说明所述衬底处理装置的构成的图解性正视图。
[0037]
图2是用来说明所述衬底处理装置所具备的装载口处载置的载具的构成的示意图。
[0038]
图3是用来说明所述衬底处理装置所具备的膜涂布去除装置的构成例的示意性剖视图。
[0039]
图4是用来说明所述衬底处理装置所具备的物理洗净装置的构成例的示意性剖视图。
[0040]
图5a是用来说明所述衬底处理装置所具备的翻转单元的构成例的示意性剖视图。
[0041]
图5b是沿着图5a所示的vb-vb线的剖视图。
[0042]
图5c是沿着图5a所示的vc-vc线的剖视图。
[0043]
图5d是用来说明衬底从图5c所示的状态翻转后的状态的剖视图。
[0044]
图6是用来说明所述衬底处理系统的控制相关的构成例的框图。
[0045]
图7是用来说明所述衬底处理系统的具体的衬底处理流程的流程图。
[0046]
图8a~图8h是用来说明进行所述衬底处理的一例时衬底的情况的示意图。
[0047]
图9a~图9c是用来说明从衬底的保护对象面去除保护膜的情况的示意图。
[0048]
图10是用来说明第1实施方式的衬底处理的变化例的示意图。
[0049]
图11是用来说明第1实施方式的变化例的物理洗净装置的构成例的示意性剖视图。
[0050]
图12是本发明的第2实施方式的衬底处理系统所具备的物理洗净装置的示意性剖视图。
[0051]
图13a是本发明的第3实施方式的衬底处理系统的构成的俯视图。
[0052]
图13b是用来说明第3实施方式的衬底处理装置的构成的图解性正视图。
[0053]
图14是第3实施方式的衬底处理系统所具备的衬底处理装置的膜涂布装置的示意性剖视图。
[0054]
图15是用来说明第3实施方式的衬底处理装置所具备的膜去除装置的构成例的示意性剖视图。
[0055]
图16是用来说明第3实施方式的衬底处理系统的具体的衬底处理的流程的流程图。
[0056]
图17是用来说明第3实施方式的衬底处理装置所具备的膜去除装置的变化例的示意性剖视图。
具体实施方式
[0057]
<第1实施方式>
[0058]
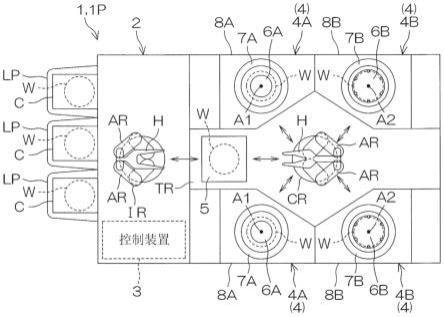
图1a是用来说明本发明的第1实施方式的衬底处理系统1所具备的衬底处理装置2的构成的俯视图。图1b是用来说明衬底处理装置2的构成的图解性正视图。
[0059]
衬底处理系统1是处理硅晶圆等衬底w的系统。衬底处理系统1包含将衬底w逐片进行处理的单片式衬底处理装置(单片处理装置)2、及控制衬底处理装置2的控制装置(控制器)3。
[0060]
衬底处理装置2包含:多个液体处理装置4,利用液体对衬底w进行处理;多个装载口(收容器载置部件)lp,分别载置多个载具(收容器)c,这多个载具(收容器)c收容利用液体处理装置4加以处理的多片衬底w;以及多个搬送机器人(移载传送机器人ir及主搬送机器人cr),在装载口lp与液体处理装置4之间搬送衬底w。
[0061]
该实施方式中,衬底w为圆板状的衬底。衬底w的直径例如为300mm。衬底w具有保护对象面w1、及与保护对象面w1为相反侧的洗净对象面w2。保护对象面w1是作为保护对象的面,洗净对象面w2是作为物理洗净对象的面。保护对象面w1是形成着微细电路图案的器件面、及未形成电路图案的非器件面中的任一个。洗净对象面w2也是器件面及非器件面中的任一个。电路图案例如可以是通过微细沟槽形成的线状的图案,也可以通过设置多个微细孔(孔隙或微孔)而形成。具有代表性的是,保护对象面w1为器件面,洗净对象面w2为非器件面。
[0062]
如图2所示,各载具c包含:壳体部c1,收容多片衬底w;以及多个支撑部c2,从下侧接触衬底w的周缘部,逐片地支撑衬底w。因此,为了不使保护对象面w1因与支撑部c2接触而受到污染,衬底w以保护对象面w1朝向上侧的第1姿势被收容到载具c上,衬底w的洗净对象面w2的周缘部与支撑部c2接触。
[0063]
所谓洗净对象面w2的周缘部,是指衬底w的周端与洗净对象面w2上从衬底w的周端起以特定距离往内侧偏靠的位置之间的区域。同样,所谓保护对象面w1的周缘部,是指衬底w的周端与保护对象面w1上从衬底w的周端起以特定距离往内侧偏靠的位置之间的区域。
[0064]
参照图1a及图1b,多个搬送机器人包含:移载传送机器人ir,针对装载口lp上的载
具c进行衬底w的搬入及搬出;以及主搬送机器人cr,与移载传送机器人ir之间进行衬底w的交接,且针对多个液体处理装置4进行衬底w的搬入及搬出。
[0065]
衬底处理装置2还包含翻转单元5,该翻转单元5从移载传送机器人ir及主搬送机器人cr接收衬底w,固持衬底w的周缘部并使衬底w翻转。因衬底w被翻转单元5翻转,衬底w的姿势变化为第1姿势、及保护对象面w1朝向下侧的第2姿势中的任一个。
[0066]
移载传送机器人ir及主搬送机器人cr配置在从装载口lp延伸到多个液体处理装置4的搬送路径tr上。翻转单元5在搬送路径tr上,位于移载传送机器人ir与主搬送机器人cr之间。
[0067]
各搬送机器人皆为包含一对多关节臂ar及一对机械手h的多关节臂机器人,所述一对机械手h以彼此上下隔开的方式分别设置在一对多关节臂ar的前端。各搬送机器人所具备的机械手h构成为与洗净对象面w2及保护对象面w1中的朝向下侧的面的周缘部接触并保持衬底w(参照下述图8d及图8f)。
[0068]
多个液体处理装置4形成了分别配置在水平分离的4个位置上的4个处理塔。各处理塔包含沿上下方向积层的多个(图1b的例子中为3个)液体处理装置4。4个处理塔在搬送路径tr的两侧各配置2个。
[0069]
多个液体处理装置4包含:多个膜涂布去除装置4a,在衬底w的保护对象面w1上涂布保护膜,或从保护对象面w1去除保护膜;以及多个物理洗净装置4b,对衬底w的洗净对象面w2执行物理洗净。所谓物理洗净,是指通过对衬底w作用物理力而将衬底w洗净。所谓物理力,是指洗净液或洗净部件对衬底w赋予的冲击(动能)。
[0070]
该实施方式中,移载传送机器人ir侧的2个处理塔包含多个膜涂布去除装置4a,与移载传送机器人ir为相反侧的2个处理塔包含多个物理洗净装置4b。
[0071]
各膜涂布去除装置4a包含:第1旋转夹盘6a,一边将衬底w水平地保持,一边使衬底w绕通过衬底w的中心的铅直的旋转轴线a1(铅直轴线)旋转;第1处理杯7a,包围第1旋转夹盘6a,承接从衬底w飞溅的液体;以及第1腔室8a,收容第1旋转夹盘6a及第1处理杯7a。
[0072]
各物理洗净装置4b包含:第2旋转夹盘6b,一边将衬底w水平地保持,一边使衬底w绕通过衬底w的中心的铅直的旋转轴线a2(铅直轴线)旋转;第2处理杯7b,包围第2旋转夹盘6b,承接从衬底w飞溅的液体;以及第2腔室8b,收容第2旋转夹盘6b及第2处理杯7b。
[0073]
在第1腔室8a,形成有用来供主搬送机器人cr搬入衬底w或搬出衬底w的出入口(未图示)。第1腔室8a具备使该出入口打开或关闭的挡闸单元(未图示)。第2腔室8b也与第1腔室8a同样,具有出入口(未图示)及挡闸单元(未图示)。多个搬送机器人构成了在多个载具c(多个装载口lp)、翻转单元5、第1旋转夹盘6a及第2旋转夹盘6b之间搬送衬底w的搬送单元。
[0074]
图3是用来说明膜涂布去除装置4a的构成例的示意性剖视图。图3中,省略了第1腔室8a的图示。
[0075]
第1旋转夹盘6a是将衬底w以第1姿势保持的第1衬底保持单元的一例。第1旋转夹盘6a也是一边将衬底w以第1姿势保持,一边使衬底w绕旋转轴线a1旋转的第1衬底保持旋转单元的一例。
[0076]
第1旋转夹盘6a包含:第1旋转基座21(第1基座),从下侧与衬底w对向,吸附保持衬底w的洗净对象面w2的中央部;第1旋转轴22,沿着旋转轴线a1在铅直方向上延伸且与第1旋转基座21结合;第1旋转马达23,使第1旋转轴22绕旋转轴线a1旋转;以及第1马达外壳24,收
容第1旋转轴22及第1旋转马达23。洗净对象面w2的中央部是包含洗净对象面w2的中心、及该中心的周边区域的区域,且是比洗净对象面w2的周缘部靠中心侧的区域。
[0077]
第1旋转基座21具有供吸附在衬底w的洗净对象面w2的吸附面21a。吸附面21a例如为第1旋转基座21的上表面,是中心被旋转轴线a1穿过的圆形面。吸附面21a的直径小于衬底w的直径。第1旋转轴22的上端部从第1马达外壳24突出,与第1旋转基座21结合。
[0078]
在第1旋转基座21及第1旋转轴22插入了抽吸路径25。抽吸路径25具有从第1旋转基座21的吸附面21a的中心露出的抽吸口25a。抽吸路径25连结于抽吸配管26。抽吸配管26连结于真空泵等抽吸装置27。
[0079]
抽吸配管26中介装着用来将该路径打开或关闭的抽吸阀28。通过打开抽吸阀28,配置在第1旋转基座21的吸附面21a的衬底w被抽吸路径25的抽吸口25a抽吸。由此,衬底w从下侧吸附在吸附面21a,水平地保持在特定的保持位置(图3所示的衬底w的位置、第1保持位置)。第1旋转夹盘6a是使衬底w吸附在第1旋转基座21,将衬底w水平地保持的第1吸附保持单元的一例。
[0080]
通过利用第1旋转马达23使第1旋转轴22旋转,第1旋转基座21旋转。由此,衬底w与第1旋转基座21一起绕旋转轴线a1旋转。
[0081]
第1旋转夹盘6a也可具备定中心单元29,该定中心单元29使衬底w水平移动,以使衬底w的保护对象面w1的中心向旋转轴线a1靠近。
[0082]
在比第1旋转基座21靠上侧的位置,设有阻断板30,该阻断板30将与保持在第1旋转夹盘6a的衬底w的保护对象面w1之间的空间内的气体氛围与该空间外部的气体氛围阻断。
[0083]
阻断板30具有从上侧与保持在第1旋转夹盘6a的衬底w的保护对象面w1对向的对向面30a。阻断板30形成为具有与衬底w大致相同的直径或比其更大的直径的圆板状。在阻断板30的与对向面30a相反的一侧,固定着支撑轴31。
[0084]
阻断板30连接于使阻断板30升降的阻断板升降单元32。阻断板升降单元32例如包含升降驱动支撑轴31的电动马达或汽缸等致动器(未图示)。阻断板30也可为能绕旋转轴线a1旋转。
[0085]
第1处理杯7a包含:多个挡板33,接住从保持在第1旋转基座21的吸附面21a的衬底w飞溅的液体;多个承杯34,接住经多个挡板33朝下侧引导的液体;以及排气桶35,俯视下包围所有挡板33及承杯34。
[0086]
图3中示出设有3个挡板33及3个承杯34的例子。各挡板33与承杯34一一对应,各承杯34接住经对应的挡板33朝下侧引导的液体。
[0087]
多个挡板33连接着使多个挡板33分别升降的第1挡板升降单元36。第1挡板升降单元36使多个挡板33在下位置与上位置之间个别地升降。第1挡板升降单元36包含驱动多个挡板33各自的升降的多个致动器(未图示)。致动器也可以是电动马达或汽缸。
[0088]
膜涂布去除装置4a还包含多个喷嘴,这多个喷嘴从上侧朝向位于第1保持位置的衬底w的保护对象面w1供给流体。多个喷嘴包含:移动喷嘴9,沿水平方向及铅直方向移动;固定喷嘴10,水平位置及铅直位置固定;以及中央喷嘴11,在与位于第1保持位置的衬底w的保护对象面w1的中央部对向的位置,和阻断板30一起上下移动。保护对象面w1的中央部是包含保护对象面w1的中心、及中心的周边区域的区域,且是比保护对象面w1的周缘部靠中
心侧的区域。
[0089]
移动喷嘴9连接于使之沿着水平方向及铅直方向移动的多个喷嘴移动单元37。移动喷嘴9能够在水平方向上,在中心位置与初始位置(退避位置)之间移动。移动喷嘴9位于中心位置时,与衬底w的保护对象面w1的中央部对向。移动喷嘴9位于初始位置时,不与衬底w的保护对象面w1对向,俯视下位于第1处理杯7a的外侧。喷嘴移动单元37包含电动马达或汽缸等致动器(未图示)。移动喷嘴9可以是旋动式喷嘴,也可以是直动式喷嘴。
[0090]
移动喷嘴9的前端具有喷出口9a。喷出口9a设置在比第1保持位置靠上侧的位置。移动喷嘴9从上侧与衬底w对向时,喷出口9a从上侧与衬底w的保护对象面w1对向。移动喷嘴9构成为朝向位于第1保持位置的衬底w的保护对象面w1供给(喷出)保护膜形成液及去除液。
[0091]
移动喷嘴9是向衬底w的保护对象面w1供给保护膜形成液的保护膜形成液喷嘴的一例,也是向衬底w的保护对象面w1供给氨水等去除液的去除液喷嘴的一例。喷出口9a是喷出保护膜形成液的保护膜形成液喷出口的一例,也是喷出去除液的去除液喷出口的一例。
[0092]
保护膜形成液是形成保护衬底w的保护对象面w1的保护膜的液体。保护膜形成液中含有溶质及溶剂。保护膜形成液是通过保护膜形成液中包含的溶剂的至少一部分挥发(蒸发)而形成保护膜。保护膜是保持衬底w上存在的微粒等去除对象物,且具有固定形状的半固体状膜或固体状膜。保护膜也可以是凝胶状。
[0093]
保护膜的形成时点不明确,可理解为,如果通过溶剂蒸发,保护膜形成液的粘度上升到能够保持固定形状的程度,那么就能形成保护膜。当对旋转状态的衬底w供给保护膜形成液时,液体接触到衬底w的瞬间,溶剂开始蒸发而形成保护膜。因此,向衬底w供给保护膜形成液也称为涂布保护膜。因此,移动喷嘴9也是保护膜涂布喷嘴的一例。
[0094]
保护膜也可以是通过使保护膜形成液固化或硬化而形成。此处,所谓“固化”,是指例如随着溶剂挥发,溶质因作用于分子间或原子间的力等而凝固。所谓“硬化”,是指例如溶质因聚合或交联等化学变化而凝固。因此,“固化或硬化”表示溶质因各种因素而“凝固”。
[0095]
保护膜形成液中,作为溶质,含有低溶解性成分、在去除液中的溶解性高于低溶解性成分的高溶解性成分。作为低溶解性成分及高溶解性成分,可使用在去除液中的溶解性互不相同的物质。低溶解性成分例如为酚醛。高溶解性成分例如为2,2-双(4-羟基苯基)丙烷。
[0096]
保护膜形成液中含有的溶剂只要是能使低溶解性成分及高溶解性成分溶解的液体即可。保护膜形成液中含有的溶剂优选与去除液具有相容性的液体。所谓相容性,是指两种液体相互溶解后混合的性质。
[0097]
保护膜形成液中可以包含防腐成分。防腐成分例如为bta(苯并三唑),详细内容将在下文叙述。
[0098]
保护膜主要由固体状态的低溶解性成分(低溶解性固体)与固体状态的高溶解成分(高溶解性固体)构成。保护膜中可残存有溶剂。关于保护膜形成液中含有的各成分(溶剂、低溶解性成分、高溶解性成分及防腐成分)的详细情况将在下文进行叙述。
[0099]
去除液是用来将保护膜从衬底w的主面剥离而去除的液体。去除液可以是氨水以外的碱性水溶液(碱性液体)。作为氨水以外的碱性水溶液的具体例,可例举tmah(氢氧化四甲基铵)水溶液及胆碱水溶液、以及它们的任意组合。去除液可以是纯水(优选diw
(deionized water,去离子水)),也可以是中性或酸性水溶液(非碱性水溶液)。
[0100]
移动喷嘴9连接着将保护膜形成液及去除液引导至移动喷嘴9的共通配管40。共通配管40连接着将保护膜形成液引导至共通配管40的保护膜形成液配管41、及将去除液引导至共通配管40的去除液配管42。
[0101]
打开介装在保护膜形成液配管41的保护膜形成液阀51时,保护膜形成液从移动喷嘴9的喷出口9a呈连续流状朝下侧喷出。打开介装在去除液配管42的去除液阀52时,去除液从移动喷嘴9的喷出口9a呈连续流状朝下侧喷出。
[0102]
固定喷嘴10配置在俯视下比阻断板30靠外侧的位置。固定喷嘴10连接着将冲洗液引导至固定喷嘴10的冲洗液配管43。打开介装在冲洗液配管43的冲洗液阀53时,冲洗液呈连续流状从固定喷嘴10向斜下侧喷出,供给至位于第1保持位置的衬底w的保护对象面w1的中央部。固定喷嘴10是冲洗液喷嘴的一例。
[0103]
冲洗液不限于碳酸水。冲洗液也可以是含有diw(deionized water)、碳酸水、电解离子水、浓度经稀释(例如1ppm以上且100ppm以下)的盐酸水、浓度经稀释(例如1ppm以上且100ppm以下)的氨水、还原水(氢水)中至少一种的液体。
[0104]
中央喷嘴11收容在阻断板30及支撑轴31中。设置在中央喷嘴11的前端的喷出口11a从形成在阻断板30的连通孔30b露出,从上侧与衬底w的保护对象面w1的中央部对向。
[0105]
中央喷嘴11包含:残渣去除液管39,向衬底w的上表面供给ipa等残渣去除液;及筒状的套管38,包围多个管。残渣去除液管39及套管38沿着旋转轴线a1在上下方向上延伸。残渣去除液是用来将保护膜的残渣溶解而从衬底w上去除的液体,所述保护膜的残渣是在利用去除液将所述保护膜从衬底w的上表面剥离并排除后,残留在衬底w的保护对象面w1上的。套管38除插入有残渣去除液管39以外,还可插入有冲洗液管及气体管等。
[0106]
残渣去除液管39连接在将残渣去除液引导至残渣去除液管39的残渣去除液配管44。介装在残渣去除液配管44的残渣去除液阀54打开时,残渣去除液从残渣去除液管39(中央喷嘴11)朝向衬底w的保护对象面w1的中央部呈连续流状喷出。残渣去除液管39也可包含残渣去除液配管44的前端部。中央喷嘴11是残渣去除液喷嘴的一例。
[0107]
残渣去除液优选与冲洗液及保护膜形成液具有相容性。残渣去除液使保护膜的残渣溶解。因此,残渣去除液也称为残渣溶解液。残渣去除液例如为有机溶剂,也可为包含ipa、hfe(氢氟醚)、甲醇、乙醇、丙酮、pgee(丙二醇单乙醚)及反式-1,2-二氯乙烯中的至少1种的液体。
[0108]
图4是用来说明物理洗净装置4b的构成例的示意性剖视图。图4中省略了第2腔室8b的图示。
[0109]
第2旋转夹盘6b是将衬底w以第2姿势保持的第2衬底保持单元的一例。第2旋转夹盘6b也是一边将衬底w以第2姿势保持,一边使衬底w绕旋转轴线a2旋转的第2衬底保持旋转单元的一例。
[0110]
第2旋转夹盘6b包含:第2旋转基座61(第2基座),从下侧与衬底w的保护对象面w1对向,且俯视时为大致圆形;多个夹盘销60,支撑在第2旋转基座61上,固持衬底w的周缘部;第2旋转轴62,构成为沿着旋转轴线a2在铅直方向上延伸且与第2旋转基座61一体旋转;第2旋转马达63,使第2旋转轴62绕旋转轴线a2旋转;以及第2马达外壳64,收容第2旋转轴62及第2旋转马达63。
[0111]
多个夹盘销60在第2旋转基座61的圆周方向上隔开间隔地配置在第2旋转基座61的上表面。为了对多个夹盘销60进行开合驱动,设有开合单元69。多个夹盘销60通过利用开合单元69移动到闭合位置,而固持衬底w。多个夹盘销60通过利用开合单元69移动到打开位置来解除对衬底w的固持。位于打开位置的多个夹盘销60一方面解除对衬底w的固持,一方面从下侧支撑衬底w的保护对象面w1的周缘部。开合单元69例如包含连杆机构(未图示)、及驱动源(未图示)。该驱动源例如包含电动马达。
[0112]
关于衬底w,利用多个夹盘销60固持衬底w的周缘部,将衬底w水平地保持在特定的保持位置(图4所示的衬底w的位置、第2保持位置)。
[0113]
第2旋转轴62的上端部与第2旋转基座61结合。通过利用第2旋转马达63使第2旋转轴62旋转,第2旋转基座61得以旋转。由此,衬底w与第2旋转基座61一起绕旋转轴线a2旋转。
[0114]
第2处理杯7b包含:多个挡板65,接住从保持在第2旋转夹盘6b的衬底w飞溅的液体;多个承杯66,接住经多个挡板65朝下侧引导的液体;以及排气桶67,俯视下包围所有挡板65及承杯66。
[0115]
图4中示出设置着3个挡板65及3个承杯66的例子。各挡板65与承杯66一一对应,各承杯66接住经对应的挡板65朝下侧引导的液体。
[0116]
多个挡板65连接着使多个挡板65分别升降的第2挡板升降单元68。第2挡板升降单元68使多个挡板65在下位置与上位置之间个别地升降。第2挡板升降单元68包含驱动多个挡板65各自的升降的多个致动器(未图示)。致动器也可以是电动马达或汽缸。
[0117]
物理洗净装置4b还包含:下侧喷嘴12,从下侧对衬底w的保护对象面w1供给流体;以及刷洗洗净单元70(洗净单元),对衬底w的洗净对象面w2执行刷洗洗净。所谓刷洗洗净,是指通过使刷子等洗净部件与衬底w接触并进行擦洗,而对衬底w作用物理力的洗净方法。刷洗洗净中的物理力是擦洗时刷子等洗净部件对衬底w赋予的冲击(动能)。
[0118]
刷洗洗净单元70包含:洗净液喷嘴71,对衬底w的洗净对象面w2供给diw等洗净液;洗净刷72(洗净部件),与衬底w的洗净对象面w2接触而将洗净对象面w2洗净;摆动臂73,将洗净刷72保持在末端部;以及臂驱动机构74,使摆动臂73摆动。
[0119]
洗净液喷嘴71连接着将洗净液引导至洗净液喷嘴71的洗净液配管45。洗净液配管45介装着使洗净液配管45内的流路打开或关闭的洗净液阀55。通过打开或关闭洗净液阀55,而切换来自洗净液喷嘴71的洗净液的喷出及停止。
[0120]
从洗净液喷嘴71喷出的洗净液不限于diw。从洗净液喷嘴71喷出的洗净液是从例举作为膜涂布去除装置4a所使用的冲洗液中加以选择。
[0121]
洗净刷72是由pva(聚乙烯醇)等合成树脂形成的能弹性变形的海绵刷。洗净刷72从支撑在摆动臂73的刷座75朝下侧突出。洗净刷72不限于海绵刷,也可以是具备由树脂制的多种纤维形成的毛束的刷子。
[0122]
臂驱动机构74构成为能使摆动臂73沿着水平面摆动,或使摆动臂73上下移动。利用该构成,在衬底w由第2旋转夹盘6b保持而旋转时,将洗净刷72压抵在衬底w的洗净对象面w2,且使其压抵位置沿衬底w的半径方向移动,由此能够将衬底w的整个洗净对象面w2刷洗洗净。
[0123]
臂驱动机构74例如包含使摆动臂73上下移动的升降致动器(未图示)、及使摆动臂73摆动的摆动致动器(未图示)。升降致动器可以是电动马达或汽缸。摆动致动器也可以是
电动马达或汽缸。
[0124]
下侧喷嘴12插入贯通孔61b,该贯通孔61b在第2旋转基座61的上表面中央部开口。下侧喷嘴12的喷出口12a从第2旋转基座61的上表面露出。下侧喷嘴12的喷出口12a从下侧与衬底w的保护对象面w1的中央部对向。
[0125]
下侧喷嘴12构成为喷出氮气(n2)等气体。下侧喷嘴12连接着将气体向下侧喷嘴12引导的第1气体配管46。第1气体配管46介装着使其流路打开或关闭的第1气体阀56。
[0126]
下侧喷嘴12与第2旋转基座61的贯通孔61b之间的空间形成了俯视时为圆环状的气体流路13。气体流路13连接在第2气体配管47,该第2气体配管47插入第2旋转轴62的内周面与下侧喷嘴12之间的空间。打开介装在第2气体配管47的第2气体阀57时,氮气等气体从气体流路13朝向衬底w的保护对象面w1的中心周围的部分喷出。下侧喷嘴12及气体流路13构成向保护对象面w1与第2旋转基座61之间的空间供给气体的气体供给单元。气体的喷出也可只从下侧喷嘴12及气体流路13的任一方进行。
[0127]
从下侧喷嘴12及气体流路13喷出的气体不限于氮气。从气体流路13喷出的气体也可以是空气。另外,从下侧喷嘴12及气体流路13喷出的气体也可以是除氮气以外的惰性气体。所谓惰性气体,是指对衬底w的上表面具有惰性的气体,并不限于氮气。作为惰性气体的例子,除了氮气以外,还可例举氩气等稀有气体类。
[0128]
图5a是用来说明翻转单元5的构成例的示意性剖视图。图5b是沿着图5a所示的vb-vb线的剖视图。图5c是沿着图5a所示的vc-vc线的剖视图。图5d是用来说明衬底w从图5c所示的状态翻转后的状态的剖视图。
[0129]
参照图5a,翻转单元5包含:收容壳体80,收容衬底w;支撑机构81,与衬底w的下表面(保护对象面w1及洗净对象面w2中的朝向下侧的面)的周缘部接触,从下侧支撑衬底w;夹持翻转机构90,在收容壳体80内夹持衬底w的周缘部,使之上下翻转。
[0130]
移载传送机器人ir及主搬送机器人cr(参照图1a)两者皆可进出收容壳体80的内部。收容壳体80形成有:第1开口80a,用来供移载传送机器人ir的一对机械手h(参照图1a)进出收容壳体80的内部;以及第2开口80b,用来供主搬送机器人cr的一对机械手h(参照图1a)进出收容壳体80的内部。该实施方式中,收容壳体80的内部可同时收容2片衬底w(参照图5b)。
[0131]
参照图5a及图5b,支撑机构81包含:多个第1支撑部件82,与衬底w的下表面的周缘部接触而从下侧支撑衬底w;以及多个第2支撑部件83,在从水平方向与多个第1支撑部件82对向的位置,与衬底w的下表面的周缘部接触而从下侧支撑衬底w。多个第1支撑部件82及第2支撑部件83以衬底w位于特定的基准位置(上侧基准位置)的方式,从下侧支撑衬底w。
[0132]
如图5b所示,如果衬底w的姿势为第1姿势,则第1支撑部件82及第2支撑部件83与衬底w的洗净对象面w2的周缘部接触。虽未图示,但如果衬底w的姿势为第2姿势,则第1支撑部件82及第2支撑部件83与衬底w的保护对象面w1的周缘部接触。
[0133]
支撑机构81还包含:第1致动器84,使多个第1支撑部件82在支撑衬底w的支撑位置与从支撑位置退避到下侧的退避位置之间移动;以及第2致动器85,使多个第2支撑部件83在支撑衬底w的支撑位置与从支撑位置退避到下侧的退避位置之间移动。第1致动器84使多个第1支撑部件82以从退避位置前往支撑位置时,在俯视下靠近多个第2支撑部件83的方式,朝斜上方向移动。第1致动器84也可以是电动马达或汽缸。第2致动器85使多个第2支撑
部件83以从退避位置前往支撑位置时,在俯视下靠近多个第1支撑部件82的方式,朝斜上方向移动。第2致动器85也与第1致动器84同样,可以是电动马达或汽缸。
[0134]
该实施方式中,在收容壳体80的内部同时收容着2片衬底w。因此,支撑机构81包含:多个第1下侧支撑部件86,在比第1支撑部件82(第1上侧支撑部件)靠下侧,与衬底w的下表面的周缘部接触而从下侧支撑衬底w;以及多个第2下侧支撑部件87,在比多个第2支撑部件83(第2上侧支撑部件)靠下侧,在从水平方向与多个第1下侧支撑部件86对向的位置,与衬底w的下表面的周缘部接触而从下侧支撑衬底w。
[0135]
第1下侧支撑部件86及第2下侧支撑部件87以衬底w位于特定的基准位置(下侧基准位置)的方式支撑衬底w。如图5b所示,如果衬底w的姿势为第1姿势,则第1下侧支撑部件86及第2下侧支撑部件87与衬底w的洗净对象面w2的周缘部接触。虽未图示,但如果衬底w的姿势为第2姿势,则第1下侧支撑部件86及第2下侧支撑部件87与衬底w的保护对象面w1的周缘部接触。
[0136]
支撑机构81还包含:多个第1连结部88,将第1支撑部件82和对应于该第1支撑部件82的第1下侧支撑部件86连结;以及多个第2连结部89,将第2支撑部件83和对应于该第2支撑部件83的第2下侧支撑部件87连结(参照图5b)。因此,多个第1下侧支撑部件86通过第1致动器84,与多个第1支撑部件82一起沿斜方向移动。进而,多个第2下侧支撑部件87通过第2致动器85,与多个第2支撑部件83一起沿斜方向移动。
[0137]
图5c中,省略了支撑机构81的图示。参照图5a及图5c,夹持翻转机构90包含:一对第1对向部件91;以及一对第2对向部件92,从水平方向与一对第1对向部件91分别对向,和对应的第1对向部件91一起,分别夹持位于基准位置的衬底w。夹持翻转机构90包含:第1支撑轴95,支撑一对第1对向部件91,沿水平方向延伸;第2支撑轴96,支撑一对第2对向部件92,呈与第1支撑轴95同轴状延伸;第1水平移动机构93,使第1支撑轴95沿第1对向部件91与第2对向部件92对向的对向方向f移动;以及第2水平移动机构94,使第2支撑轴96沿对向方向f移动。第1水平移动机构93例如为电动马达或汽缸。第2水平移动机构94为电动马达或汽缸。
[0138]
第1对向部件91与衬底w的保护对象面w1的周缘部及洗净对象面w2的周缘部这两者接触。第2对向部件92在相对于衬底w的中心与第1对向部件91为相反侧的位置,与衬底w的保护对象面w1的周缘部及洗净对象面w2的周缘部这两者接触。
[0139]
夹持翻转机构90包含:第1旋转轴97,以绕第1支撑轴95的中心轴线a3与第1支撑轴95一体旋转的方式,插通有第1支撑轴95;以及第2旋转轴98,以绕中心轴线a3与第2支撑轴96一体旋转的方式,插通有第2支撑轴96。第1旋转轴97与第1支撑轴95例如可通过凹凸卡合而一体旋转。第2旋转轴98与第2支撑轴96例如可通过凹凸卡合而一体旋转。
[0140]
夹持翻转机构90还包含:旋转机构99,使第1旋转轴97绕中心轴线a3旋转;以及一对轴连结部件100,将第1旋转轴97与第2旋转轴98连结。旋转机构99例如包含电动马达或汽缸。
[0141]
一对第1对向部件91以中心轴线a3为中心而对称配置,一对第2对向部件92以中心轴线a3为中心而对称配置。夹持翻转机构90还包含:第1连结部件101,将一对第1对向部件91与第1支撑轴95连结;以及第2连结部件102,将一对第2对向部件92与第2支撑轴96连结。
[0142]
通过旋转机构99驱动,第1旋转轴97及第2旋转轴98旋转,一对第1对向部件91及一
对第2对向部件92绕中心轴线a3旋转。
[0143]
以下,对翻转单元5的衬底w的翻转动作进行说明。
[0144]
首先,利用移载传送机器人ir或主搬送机器人cr(参照图1a),如图5b所示,在多个第1支撑部件82及多个第2支撑部件83载置1片衬底w(以下,称为“衬底wa”),在多个第1下侧支撑部件86及多个第2下侧支撑部件87载置1片衬底w(以下,称为“衬底wb”)。
[0145]
以下,为了简化,只对衬底wa的翻转动作进行说明。关于衬底wb的翻转动作,与以下说明中将“多个第1支撑部件82”及“多个第2支撑部件83”替换成“多个第1下侧支撑部件86”及“多个第2下侧支撑部件87”的动作相同。
[0146]
在衬底wa载置在多个第1支撑部件82及多个第2支撑部件83的状态下,使第1对向部件91与第2对向部件92相互靠近,由此利用第1对向部件91及第2对向部件92来夹持衬底wa。
[0147]
在衬底wa被第1对向部件91及第2对向部件92夹持的状态下,使多个第1支撑部件82及多个第2支撑部件83朝斜下方向,朝向退避位置移动,使多个第1支撑部件82及多个第2支撑部件83退避。由此,衬底wa被递交至第1对向部件91及第2对向部件92。
[0148]
在多个第1支撑部件82及多个第2支撑部件83退避的状态下,使第1对向部件91及第2对向部件92旋转,由此使衬底wa翻转。衬底wa的姿势在图5c所示的翻转前的状态下,为第1姿势,在图5d所示的翻转后的状态下,为第2姿势。
[0149]
衬底wa翻转后,使多个第1下侧支撑部件86及多个第2下侧支撑部件87朝斜上侧,朝向支撑位置移动,由此利用多个第1下侧支撑部件86及多个第2下侧支撑部件87从下侧支撑衬底wa。在衬底wa被多个第1下侧支撑部件86及多个第2下侧支撑部件87从下侧支撑的状态下,使第1对向部件91及第2对向部件92以相互分开的方式移动,由此,衬底wa被递交至多个第1下侧支撑部件86及多个第2下侧支撑部件87。该状态下,移载传送机器人ir及主搬送机器人cr(参照图1a)能接近衬底wa。
[0150]
也能利用同样的动作,使衬底wa的姿势从第2姿势变化为第1姿势。像这样,翻转单元5能够利用第1对向部件91及第2对向部件92夹持衬底w的周缘部并使衬底w翻转,以使得衬底w的姿势变化为第1姿势及第2姿势的任一种姿势。
[0151]
翻转单元5由于能够使用支撑机构81从下侧支撑衬底w,所以也作为不使衬底w翻转而暂时载置衬底w,以便在移载传送机器人ir与主搬送机器人cr之间交接衬底w的载置单元发挥功能。
[0152]
图6是用来说明与衬底处理系统1的控制相关的构成例的框图。控制装置3是包含计算机主体3a、及连接在计算机主体3a的周边装置3d的计算机。计算机主体3a包含:cpu3b(central processing unit:中央处理装置),执行各种命令;及主存储装置3c,存储信息。周边装置3d包含:辅助存储装置3e,存储程序p等信息;读取装置3f,从可移动媒体rm读取信息;以及通信装置3g,与主机计算机等其它装置进行通信。
[0153]
控制装置3连接在输入装置3a、显示装置3b及警报装置3c。输入装置3a供用户或维护人员等操作者向衬底处理装置2输入信息时操作。信息显示在显示装置3b的画面中。输入装置3a可以是键盘、指标器件及触控面板中的任一个,也可以是除这些器件以外的装置。也可在衬底处理装置2中设置兼用作输入装置3a及显示装置3b的触控面板显示器。警报装置3c使用光、声音、字符及图形中的一个以上发出警报。在输入装置3a为触控面板显示器的情
况下,输入装置3a也可兼用作警报装置3c。
[0154]
cpu3b执行辅助存储装置3e中存储的程序p。辅助存储装置3e内的程序p可以是预先安装在控制装置3的程序,也可以是通过读取装置3f从可移动媒体rm发送到辅助存储装置3e的程序,还可以是从主机计算机hc等外部装置通过通信装置3g发送到辅助存储装置3e的程序。
[0155]
辅助存储装置3e及可移动媒体rm是不供给电力也能保持存储的非易失性存储器。辅助存储装置3e例如为硬盘驱动器等磁性存储装置。可移动媒体rm例如为压缩磁盘等光盘或存储卡等半导体存储器。可移动媒体rm是记录有程序p的计算机能读取的记录介质的一例。可移动媒体rm是非临时的有形记录介质。
[0156]
辅助存储装置3e存储着多个配方r。配方r是规定衬底w的处理内容、处理条件及处理步序的信息。多个配方r在衬底w的处理内容、处理条件及处理步序中的至少一方面互不相同。
[0157]
控制装置3控制液体处理装置4、翻转单元5、移载传送机器人ir、主搬送机器人cr等,以按照主存储装置3c中设定的配方r来处理衬底w。以下各工序是通过控制装置3控制这些构成而执行的。换句话说,控制装置3被编程为执行以下各工序。
[0158]
图7是用来说明衬底处理系统1实施的衬底处理的一例的流程图。图7中主要示出通过控制装置3执行程序而实现的处理。图8a~图8h是用来说明衬底处理系统1实施的衬底处理的各工序的情况的示意图。
[0159]
在衬底处理系统1实施的衬底处理中,例如如图7所示,依序执行保护膜形成液供给工序(步骤s1)、保护膜形成工序(步骤s2)、第1翻转工序(步骤s3)、物理洗净工序(步骤s4)、第2翻转工序(步骤s5)、保护膜去除工序(步骤s6)、冲洗工序(步骤s7)、残渣去除工序(步骤s8)、及衬底干燥工序(步骤s9)。
[0160]
以下,主要参照图1a~图4及图7对衬底处理系统1实施的衬底处理进行说明。还会适当参照图8a~图8h。
[0161]
首先,由移载传送机器人ir将未处理的衬底w从载具c搬出。移载传送机器人ir经由翻转单元5,将衬底w递交至主搬送机器人cr。主搬送机器人cr将从移载传送机器人ir接收到的衬底w搬送到膜涂布去除装置4a内,递交至第1旋转夹盘6a。
[0162]
如上所述,衬底w以第1姿势收容在载具c内(参照图2)。因此,被递交至第1旋转夹盘6a后,衬底w的姿势也维持为第1姿势。
[0163]
通过从主搬送机器人cr递交至第1旋转夹盘6a,衬底w被载置在第1旋转基座21的吸附面21a上。在衬底w载置在吸附面21a的状态下,打开抽吸阀28。由此,衬底w的洗净对象面w2从下侧被吸附到第1旋转基座21的吸附面21a。由此,如图8a所示,衬底w以第1姿势保持在第1保持位置(第1衬底保持工序)。
[0164]
载置在第1旋转基座21上的衬底w也可在抽吸阀28打开之前,由定中心单元29以衬底w的保护对象面w1的中央部与旋转轴线a1大致一致的方式定中心。
[0165]
接着,主搬送机器人cr退避到膜涂布去除装置4a外之后,开始保护膜形成液供给工序(步骤s1)。在保护膜形成液供给工序中,首先,第1旋转马达23使第1旋转基座21旋转。由此,使保持在第1保持位置的衬底w旋转(第1衬底旋转工序)。
[0166]
之后,喷嘴移动单元37使移动喷嘴9移动到处理位置。移动喷嘴9的处理位置例如
为中央位置。在移动喷嘴9位于处理位置的状态下,打开保护膜形成液阀51。由此,如图8a所示,从移动喷嘴9的喷出口9a朝向旋转状态的衬底w的保护对象面w1的中央部供给(喷出)保护膜形成液(保护膜形成液供给工序、保护膜形成液喷出工序)。供给至衬底w的保护对象面w1的保护膜形成液因离心力而扩散到整个保护对象面w1。由此,如图8b所示,在衬底w的整个保护对象面w1上形成保护膜形成液的液膜201(液膜形成工序)。
[0167]
接着,执行保护膜形成工序(步骤s2)。在保护膜形成工序中,通过使保护膜形成液的液膜201薄膜化来促进液膜201中的溶剂蒸发,而在保护对象面w1形成半固体状或固体状的保护膜200(参照图8c)。
[0168]
在保护膜形成工序中,衬底w上的保护膜形成液的液膜201的厚度变薄(薄膜化工序)。具体来说,通过关闭保护膜形成液阀51,而停止对衬底w供给保护膜形成液。由于在已停止对保护对象面w1供给保护膜形成液的状态下,衬底w旋转,所以保护膜形成液的一部分被从保护对象面w1排除(甩出工序)。由此,衬底w上的液膜201的厚度成为合适的厚度。关闭保护膜形成液阀51之后,利用喷嘴移动单元37使移动喷嘴9移动到初始位置。
[0169]
因衬底w旋转而产生的离心力不仅能将保护膜形成液从衬底w的保护对象面w1排除,也会作用于与液膜201接触的气体。通过离心力的作用,该气体形成从衬底w的保护对象面w1的中心侧流向周缘侧的气流。通过该气流,与液膜201接触的气体状态的溶剂被从与衬底w接触的气体氛围中排除。因此,促进了溶剂从衬底w上的保护膜形成液中蒸发(挥发),如图8c所示,形成保护膜200(溶剂蒸发工序、保护膜形成工序)。像这样,供给保护膜形成液后,保护对象面w1上会迅速地形成保护膜200。换句话说,通过供给保护膜形成液,而在保护对象面w1上涂布保护膜200(保护膜涂布工序)。
[0170]
也可在保护膜形成工序开始前,在如图8a所示仅保护对象面w1的中央部存在保护膜形成液的状态下,关闭保护膜形成液阀51。该情况下,通过因衬底w旋转而产生的离心力,保护膜形成液扩散到整个保护对象面w1,从而使液膜201变薄。因此,能减少从保护对象面w1排除的保护膜形成液的量。
[0171]
涂布保护膜200时,使洗净对象面w2的中央部吸附在第1旋转基座21的吸附面21a。因此,第1旋转夹盘6a不设置与衬底w的周缘部接触的部件,就能保持衬底w。即,能够不在保护对象面w1的周缘部附近设置妨碍保护膜200的涂布的部件地涂布保护膜200。因此,能实现提高针对保护对象面w1的周缘部的保护膜200的均匀性。换句话说,能够良好地保护衬底w的保护对象面w1。
[0172]
在保护对象面w1上形成着保护膜200的状态下,利用主搬送机器人cr将衬底w从膜涂布去除装置4a搬出。具体来说,在衬底w的旋转停止且抽吸阀28关闭后,主搬送机器人cr从第1旋转夹盘6a接收衬底w。如图8d所示,利用主搬送机器人cr,以机械手h与洗净对象面w2的周缘部接触的状态搬送衬底w。从膜涂布去除装置4a搬出的衬底w由主搬送机器人cr搬入翻转单元5。利用翻转单元5将被搬入翻转单元5的衬底w翻转,使衬底w的姿势从第1姿势变化为第2姿势(步骤s3:第1翻转工序)。图8e表示经翻转单元5翻转后的衬底w的情况。详细来说,翻转单元5与衬底w的周缘部接触并且使衬底w翻转,使保护对象面w1上形成着保护膜200的状态下的衬底w的姿势从第1姿势变化为第2姿势。翻转单元5作为第1翻转单元发挥功能。
[0173]
经翻转单元5翻转后的衬底w由主搬送机器人cr从翻转单元5搬出。如图8f所示,利
用主搬送机器人cr以机械手h与保护对象面w1的周缘部接触的状态搬送衬底w。衬底w由主搬送机器人cr搬入物理洗净装置4b内,递交至第2旋转夹盘6b。由此,将衬底w以保护对象面w1朝向下侧的状态,从上侧载置在位于打开位置的多个夹盘销60上。主搬送机器人cr将衬底w载置在多个夹盘销60上之后,退避到物理洗净装置4b外。
[0174]
在多个夹盘销60上载置着衬底w的状态下,使多个夹盘销60移动到闭合位置。由此,第2旋转夹盘6b保持由翻转单元5令姿势变化为第2姿势的状态的衬底w。详细来说,如图8g所示,多个夹盘销60与保护对象面w1的周缘部接触并固持衬底w,将衬底w以第2姿势保持在第2保持位置(第2衬底保持工序)。在保护对象面w1的周缘部涂布了保护膜200,所以能够不使多个夹盘销60直接与保护对象面w1的周缘部接触地,利用多个夹盘销60来固持衬底w的周缘部。因此,能够更确实地抑制因保持衬底w而导致保护对象面w1受到污染。
[0175]
在衬底w被多个夹盘销60固持的状态下,第2旋转马达63使第2旋转基座61旋转。由此,保持在第2保持位置的衬底w旋转(第2衬底旋转工序)。
[0176]
接着,开始对衬底w的洗净对象面w2进行物理洗净的物理洗净工序(步骤s4)。在物理洗净工序中,刷洗洗净单元70将保护对象面w1上形成着保护膜200且由第2旋转夹盘6b保持的状态下的衬底w的洗净对象面w2洗净。详细来说,执行一边对衬底w的洗净对象面w2供给洗净液,一边将洗净刷72压抵在洗净对象面w2而将洗净对象面w2洗净的刷洗洗净(物理洗净)。
[0177]
更具体来说,在衬底w旋转的状态下,打开洗净液阀55。由此,从洗净液喷嘴71朝向衬底w的洗净对象面w2的中央部供给洗净液。供给至洗净对象面w2的洗净液因离心力而扩散到衬底w的整个洗净对象面w2。如图8g所示,一边对衬底w的洗净对象面w2供给洗净液,一边使压抵在洗净对象面w2的洗净刷72水平移动,由此对洗净对象面w2执行刷洗洗净。由此,利用洗净刷72,对洗净对象面w2作用物理力而将洗净对象面w2洗净。
[0178]
刷洗洗净与利用连续流的液体实施的洗净相比,会对洗净对象面w2赋予更大的冲击能。因此,与利用连续流的液体实施的洗净相比,污染物质容易飞溅。只要在整个保护对象面w1上涂布保护膜200,就能够通过物理洗净将洗净对象面w2充分地洗净,并且能够抑制由物理洗净引起的保护对象面w1的污染。
[0179]
另外,执行刷洗洗净时,从下侧喷嘴12及气体流路13喷出的气体被供给至保护对象面w1与第2旋转基座61之间的空间(气体供给工序)。
[0180]
由于对第2旋转基座61与保护对象面w1之间的空间供给气体,所以会形成从该空间流向该空间外部的气流。因此,能够抑制在洗净对象面w2的刷洗洗净中,飞溅到气体氛围中的污染物质流入第2旋转基座61与保护对象面w1之间的空间并附着在保护对象面w1。另外,能够抑制附着在衬底w的洗净对象面w2上的洗净液移动到衬底w的保护对象面w1。因此,保护对象面w1能被良好地保护。
[0181]
洗净对象面w2经物理洗净的衬底w由主搬送机器人cr从物理洗净装置4b搬出。具体来说,在衬底w的旋转停止且使多个夹盘销60移动到打开位置后,主搬送机器人cr从第2旋转夹盘6b接收衬底w。利用主搬送机器人cr,以机械手h与保护对象面w1的周缘部接触的状态来搬送衬底w(参照所述图8f)。
[0182]
从物理洗净装置4b搬出的衬底w由主搬送机器人cr搬入翻转单元5。利用翻转单元5将被搬入翻转单元5的衬底w翻转,使衬底w的姿势变化为第1姿势(步骤s5:第2翻转工序)。
详细来说,翻转单元5与衬底w的周缘部接触并使衬底w翻转,使保护对象面w1上形成着保护膜200的状态下的衬底w的姿势从第2姿势变化为第1姿势。翻转单元5作为第2翻转单元发挥功能。
[0183]
经翻转单元5翻转后的衬底w由主搬送机器人cr从翻转单元5搬出。利用主搬送机器人cr以机械手h与洗净对象面w2的周缘部接触的状态来搬送衬底w(参照所述图8d)。衬底w由主搬送机器人cr搬入膜涂布去除装置4a内,并交递给第1旋转夹盘6a。详细来说,将衬底w载置在第1旋转基座21的吸附面21a上。该状态下,通过打开抽吸阀28,而将衬底w的洗净对象面w2从下侧吸附到第1旋转基座21的吸附面21a。由此,如图8h所示,将衬底w以第1姿势保持在第1保持位置(第3衬底保持工序)。
[0184]
第1旋转夹盘6a保持通过翻转单元5使姿势从第2姿势变化为第1姿势的状态的衬底w。第1旋转基座21作为第3基座发挥功能,第1旋转夹盘6a作为将衬底w保持在第3保持位置(图3所示的衬底w的位置)的第3衬底保持单元发挥功能。该实施方式中,第3保持位置为与第1保持位置相同的位置。
[0185]
接着,在主搬送机器人cr退避到膜涂布去除装置4a外之后,开始保护膜去除工序(步骤s6)。在保护膜去除工序中,首先,第1旋转马达23使第1旋转基座21旋转。由此,使水平地保持的衬底w旋转(第3衬底旋转工序)。
[0186]
之后,喷嘴移动单元37使移动喷嘴9移动到处理位置(中央位置)。在移动喷嘴9位于处理位置的状态下,打开去除液阀52。由此,如图8h所示,从移动喷嘴9的喷出口9a朝向旋转状态的衬底w的保护对象面w1的中央部供给(喷出)去除液(去除液供给工序、去除液喷出工序)。移动喷嘴9对通过翻转单元5使姿势从第2姿势变化为第1姿势且由第1旋转夹盘6a保持的状态下的衬底w的保护对象面w1供给去除液。
[0187]
供给至衬底w的保护对象面w1的去除液因离心力而扩散到整个保护对象面w1,从衬底w的周缘部排出到衬底w外。通过去除液的作用,从保护对象面w1去除保护膜200。详细来说,将保护对象面w1的保护膜200剥离,与去除液一起排出到衬底w外。如果从上侧朝向保护对象面w1供给去除液,则与对朝向下侧的保护对象面w1供给去除液的构成相比,容易使去除液均匀地扩散到整个保护对象面w1。因此,能够从保护对象面w1良好地去除保护膜200。
[0188]
另外,在保护膜去除工序中,利用与涂布保护膜200时相同的部件,即,以保持在第1旋转夹盘6a上的状态,执行保护膜200的去除。因此,与为了去除保护膜200而设置其它衬底保持单元的情况相比,能实现衬底处理系统1的小型化。
[0189]
在保护膜去除工序(步骤s6)之后,依次执行:冲洗工序(步骤s7),利用冲洗液将去除液从衬底w的保护对象面w1冲洗掉;残渣去除工序(步骤s8),利用残渣去除液,从衬底w的保护对象面w1去除保护膜200的残渣。
[0190]
在冲洗工序中,从固定喷嘴10朝向旋转状态的衬底w的保护对象面w1的中央部供给(喷出)冲洗液(冲洗液供给工序、冲洗液喷出工序)。在残渣去除工序中,从中央喷嘴11朝向旋转状态的衬底w的保护对象面w1的中央部供给(喷出)残渣去除液(残渣去除液供给工序、残渣去除液喷出工序)。
[0191]
有时即使利用去除液将保护膜从衬底w剥离并从衬底w上排除后,衬底w的保护对象面w1上依然会残留保护膜200的残渣。供给至衬底w的保护对象面w1的残渣去除液能将这
种保护膜200的残渣溶解。从中央喷嘴11供给至衬底w的保护对象面w1的残渣去除液因离心力而扩散到衬底w的整个保护对象面w1,从衬底w的周缘部排出到衬底w外。残渣去除液在保护对象面w1上扩散,而将保护膜的残渣溶解。由此,得以去除衬底w上的保护膜的残渣。
[0192]
在残渣去除工序之后,第1旋转马达23使衬底w的旋转加速,使衬底w以高转速(例如数千rpm)旋转(衬底干燥工序:步骤s9)。由此,从衬底w去除液体,使衬底w干燥。当衬底w的高速旋转开始后经过特定时间时,第1旋转马达23停止旋转。由此,衬底w的旋转停止。
[0193]
之后,主搬送机器人cr进入膜涂布去除装置4a,从第1旋转夹盘6a接收处理过的衬底w,并向膜涂布去除装置4a外搬出。从膜涂布去除装置4a搬出的衬底w经由翻转单元5,从主搬送机器人cr递交至移载传送机器人ir。移载传送机器人ir从翻转单元5接收衬底w,在将衬底w的姿势维持为第1姿势的状态下,将衬底w收容到载具c中(也参照图1b)。
[0194]
接着,使用图9a~图9c,详细地说明将保护膜200从衬底w去除的情况。图9a~图9c是用来说明将保护膜200从衬底w去除的情况的示意图。
[0195]
衬底w的保护对象面w1有时会附着有微粒203。由于保护膜形成液凝固成保持固定形状的程度,所以微粒203从保护对象面w1剥离后,会掺入到保护膜200内。因此,在保护膜形成工序(步骤s2)中形成的保护膜200如图9a所示,保持着附着在衬底w的保护对象面w1的微粒203。
[0196]
进行保护膜去除工序之前,保护膜200含有固体状态的高溶解性成分(高溶解性固体210)、及固体状态的低溶解性成分(低溶解性固体211)。高溶解性固体210及低溶解性固体211是通过保护膜形成液中含有的溶剂的至少一部分蒸发而形成。
[0197]
参照图9b,利用去除液选择性地将高溶解性固体210溶解。即,保护膜200部分溶解(溶解工序、部分溶解工序)。
[0198]
所谓“选择性地将高溶解性固体210溶解”,并非意指仅使固体状态的高溶解性固体210溶解。所谓“选择性地将高溶解性固体210溶解”,意指使少量的固体状态的低溶解性固体211溶解,使大部分的高溶解性固体210溶解。
[0199]
以高溶解性固体210的选择性溶解为契机,在保护膜200中偏聚存在高溶解性固体210的部分,形成作为去除液路径的贯通孔202(贯通孔形成工序)。
[0200]
偏聚存在高溶解性固体210的部分并非仅存在高溶解性固体210,也存在低溶解性固体211。去除液不仅会使高溶解性固体210溶解,也会使高溶解性固体210周围的低溶解性固体211溶解,因此能促进形成贯通孔202。
[0201]
贯通孔202在俯视下,例如为直径数nm的大小。贯通孔202无需以能够观测到的程度明确形成。即,只要在保护膜200形成供去除液从保护膜200的上表面移动到衬底w的保护对象面w1的去除液路径即可,且只要该去除液路径整体上贯通保护膜200即可。
[0202]
此处,在保护膜200中适度残留有溶剂的情况下,去除液一边溶解在保护膜200中残留的溶剂中,一边将保护膜200部分溶解。详细来说,去除液一边溶解在保护膜200中残留的溶剂中,一边将保护膜200中的高溶解性固体210溶解而形成贯通孔202(间隙、路径)。因此,去除液容易进入保护膜200内(溶解进入工序)。去除液通过贯通孔202,到达衬底w与低溶解性固体211的界面。
[0203]
到达衬底w的保护对象面w1的去除液作用于保护膜200与衬底w的界面,将保护膜200剥离,并将已剥离的保护膜200从衬底w的保护对象面w1去除(剥离去除工序)。
[0204]
详细来说,低溶解性固体211在去除液中的溶解性较低,大部分的低溶解性固体211维持固体状态。因此,经由贯通孔202到达衬底w的保护对象面w1附近的去除液使低溶解性固体211中处于衬底w的保护对象面w1附近的部分少量溶解。由此,如图9b的放大图所示,去除液一边使衬底w的保护对象面w1附近的低溶解性固体211缓慢溶解,一边进入保护膜200与衬底w的保护对象面w1之间的间隙g(去除液进入工序)。
[0205]
然后,例如以贯通孔202的周缘为起点,在保护膜200形成裂痕。因此,高溶解性固体210也称为裂痕产生成分。保护膜200因形成裂痕而分裂,成为膜片204。如图9c所示,保护膜200的膜片204以保持着微粒203的状态从衬底w剥离(保护膜分裂工序、保护膜去除工序)。
[0206]
然后,继续供给去除液,由此利用去除液将成为膜片204的保护膜200以保持着微粒203的状态冲洗掉。换句话说,将保持微粒203的膜片204推出到衬底w外,而从衬底w的保护对象面w1排除(保护膜排除工序、去除对象物排除工序)。由此,能够将衬底w的保护对象面w1良好地洗净。
[0207]
如上所述,通过向衬底w的保护对象面w1供给去除液,而将高溶解性固体210溶解,使保护膜200从衬底的保护对象面w1剥离。
[0208]
像这样,使用含有高溶解性成分及低溶解成分的保护膜形成液的情况下,能使去除液迅速作用于保护膜200与衬底w的界面,且能使大部分的保护膜200维持固体状态。由于能将低溶解性成分维持固体状态不变地从衬底w的保护对象面w1去除,所以能用低溶解性固体211保持微粒203,并且使去除液作用于低溶解性固体211与衬底w的界面。
[0209]
结果,能够将保护膜200迅速从衬底w剥离,且能够将微粒203与保护膜200一起从衬底w高效率地去除。
[0210]
根据第1实施方式,能利用搬送单元(移载传送机器人ir及主搬送机器人cr)将衬底w从载具c搬送到第1旋转夹盘6a。衬底w以第1姿势收容在载具c中。因此,能够将载具c中收容的衬底w,不利用翻转单元5翻转地以第1姿势保持在第1旋转夹盘6a上。
[0211]
使衬底w翻转时,衬底w的周缘部与翻转单元5接触。因此,只要在保护对象面w1的至少周缘部涂布着保护膜200的状态下使衬底w翻转,就能抑制因接触翻转单元5而引起的污染,且能使衬底w的姿势变化为第2姿势。
[0212]
之后,能够在衬底w的姿势为第2姿势的状态下,利用刷洗洗净单元70从上侧将洗净对象面w2洗净。因此,能够不受第2旋转基座61的空间上的限制,将洗净对象面w2良好地洗净。由于不受第2旋转基座61的空间上的限制,所以能利用像刷洗洗净单元70这样的规模比下侧喷嘴12大的单元,来实现洗净对象面w2的洗净。
[0213]
如上所述,能够抑制保护对象面w1的污染,且能够将洗净对象面w2良好地洗净。
[0214]
根据第1实施方式,通过涂布保护膜200,保护对象面w1得到保护。因此,与不同于第1实施方式,利用保护胶带对保护对象面w1予以保护的情况相比,能够抑制刷洗洗净时保护胶带的粘接剂卷起,且卷起的粘接剂附着在衬底的洗净对象面w2上。
[0215]
在洗净对象面w2上附着了粘接剂的情况下,为了去除保护胶带而使洗净对象面w2吸附在第1旋转基座21时,担心因粘接剂而导致衬底w发生破裂。根据第1实施方式,由于不会发生粘接剂向第1旋转基座21的附着,所以能够抑制衬底w的破裂。
[0216]
在使用保护胶带的情况下,为了抑制衬底w破裂,必须通过精度良好地调整洗净刷
72的洗净位置,或调整第1旋转基座21的吸附位置,来抑制粘接剂卷起及衬底发生破裂。
[0217]
因此,根据第1实施方式,与使用保护胶带对保护对象面w1予以保护的构成相比,能够抑制保护对象面w1的保护及洗净对象面w2的洗净变得繁杂。
[0218]
如图10所示,保护膜200也可只涂布在衬底w的保护对象面w1的周缘部。第2旋转夹盘6b的多个夹盘销60通过固持衬底w的周缘部而将衬底w保持为第2姿势,所以即使是保护膜200只涂布在衬底w的保护对象面w1的周缘部的构成,也能够抑制因保持第2旋转夹盘6b而导致衬底w的保护对象面w1受到污染。另外,翻转单元5由于利用第1对向部件91及第2对向部件92夹持衬底w的周缘部而使衬底w翻转,所以即使是保护膜200只涂布在衬底w的保护对象面w1的周缘部的构成,也能够抑制衬底w的保护对象面w1被翻转单元5污染。
[0219]
同样,能够抑制衬底w的保护对象面w1被翻转单元5的多个第1支撑部件82、多个第2支撑部件83、多个第1下侧支撑部件86及多个第2下侧支撑部件87污染。同样,能够抑制衬底w的保护对象面w1被多个搬送机器人的机械手h污染。像这样,保护膜200只要至少涂布在保护对象面w1的周缘部即可。然而,如上所述,通过在整个保护对象面w1上涂布保护膜200,能够更有效地对保护对象面w1予以保护,使其免于遭受在刷洗洗净等物理洗净时飞溅的污染物质。
[0220]
图11是用来说明第1实施方式的第1变化例的物理洗净装置4b的构成例的示意性剖视图。
[0221]
第1实施方式的第1变化例的物理洗净装置4b的第2旋转夹盘6b构成为,第2旋转基座121从下侧与衬底w对向,吸附保持衬底w的洗净对象面w2的中央部。
[0222]
第2旋转基座121具有供吸附在衬底w的洗净对象面w2的吸附面121a。吸附面121a例如为第2旋转基座121的上表面,是中心被旋转轴线a2穿过的圆形面。吸附面121a的直径小于衬底w的直径。第2旋转轴62的上端部从第2马达外壳64突出,与第2旋转基座121结合。
[0223]
在第2旋转基座121及第2旋转轴62插入了抽吸路径125。抽吸路径125具有从第2旋转基座121的吸附面121a的中心露出的抽吸口125a。抽吸路径125连结于抽吸配管126。抽吸配管126连结于真空泵等抽吸装置127。
[0224]
抽吸路径125中介装着用来将该路径打开或关闭的抽吸阀128。通过打开抽吸阀128,配置在第2旋转基座121的吸附面121a的衬底w被抽吸路径125的抽吸口125a抽吸。由此,衬底w从下侧吸附在吸附面121a,保持在特定的保持位置(图11所示的衬底w的位置、第2保持位置)。第2旋转夹盘6b是使衬底w吸附并保持在第2旋转基座121的第2吸附保持单元的一例。
[0225]
通过利用第2旋转马达63使第2旋转轴62旋转,第2旋转基座121旋转。由此,衬底w与第2旋转基座121一起绕旋转轴线a2旋转。
[0226]
第2旋转夹盘6b也可具备定中心单元129,该定中心单元129使衬底w水平移动,以使衬底w的洗净对象面w2的中心向旋转轴线a2靠近。
[0227]
第1变化例中,在衬底w的整个保护对象面w1上涂布保护膜200,第2旋转夹盘6b使保护对象面w1的中央部吸附在第2旋转基座121,而保持衬底w。因此,不使第2旋转基座121直接接触衬底w的保护对象面w1的中央部,就能使保护膜200的中央部吸附在第2旋转基座121上而保持衬底w。因此,能够抑制因物理洗净时保持衬底w而引起保护对象面w1受到污染。
[0228]
<第2实施方式>
[0229]
图12是用来说明第2实施方式的衬底处理系统1p所具备的物理洗净装置4b的构成例的示意性剖视图。图12中,对于与所述图1~图11所示的构成等同的构成,标注与图1等相同的参照符号,并省略其说明。
[0230]
衬底处理系统1p与第1实施方式的衬底处理系统1的主要不同点在于,第2实施方式的物理洗净装置4b包含对衬底w的洗净对象面w2执行喷雾洗净(物理洗净)的喷雾洗净单元130(洗净单元),来代替刷洗洗净单元70。喷雾洗净是使液滴状态的洗净液冲撞洗净对象面w2而对洗净对象面w2作用物理力的洗净方法。喷雾洗净的物理力是洗净液的液滴d冲撞洗净对象面w2时的冲击(动能)。
[0231]
喷雾洗净单元130包含:喷雾嘴131,喷射大量洗净液(例如diw)之液滴;摆动臂132,将喷雾嘴131保持在末端部;以及臂驱动机构133,使摆动臂132摆动。
[0232]
臂驱动机构133构成为,能够使摆动臂132沿着水平面摆动,或使摆动臂132上下移动。臂驱动机构133例如包含使摆动臂132上下移动的升降致动器(未图示)、及使摆动臂132摆动的摆动致动器(未图示)。升降致动器可以是电动马达或汽缸。摆动致动器也可以是电动或汽缸。
[0233]
喷雾洗净单元130包含:洗净液配管134,将洗净液从洗净液供给源引导至喷雾嘴131;洗净液阀135,使洗净液配管134内的流路打开或关闭;泵136,对洗净液配管134送液;排出配管137,排出喷雾嘴131内的洗净液;以及排出阀138,使排出配管137内的流路打开或关闭。
[0234]
洗净液始终以特定压力(例如10mpa以下)供给至喷雾嘴131。泵136能够将供给至喷雾嘴131的洗净液的压力变更为任意压力。
[0235]
喷雾洗净单元130包含喷雾嘴131中内置的压电元件(piezoelectric element)139。在压电元件139,经由配线141连接着电压施加单元140。电压施加单元140对压电元件139施加交流电压,使压电元件139以与所施加的交流电压的频率对应的频率振动。电压施加单元140例如包含变流器。电压施加单元140能够将施加到压电元件139的交流电压的频率变更为任意频率(例如数百khz~数mhz)。
[0236]
喷雾嘴131具有:喷嘴主体131a;洗净液流通路径131b,形成在喷嘴主体131a的内部;多个喷射口131c(喷出口),与洗净液流通路径131b连接且从喷嘴主体131a的表面开口。洗净液流通路径131b是从洗净液配管134被供给洗净液,且将洗净液排出到排出配管137的流路。
[0237]
始终以高压对喷雾嘴131供给洗净液。在排出阀138关闭的状态下,洗净液流通路径131b中的洗净液的压力(液压)较高。因此,在排出阀138关闭的状态下,利用液压从各喷射口131c喷射洗净液。进而,在排出阀138关闭的状态下,对压电元件139施加交流电压时,对沿洗净液流通路径131b流动的洗净液赋予压电元件139的振动,从各喷射口131c喷射的洗净液因该振动而被分断。因此,在排出阀138关闭的状态下,对压电元件139施加交流电压时,从各喷射口131c喷射液滴状态的洗净液。由此,能以均匀的速度同时喷射粒径均匀的大量洗净液的液滴d。
[0238]
从喷雾嘴131喷出的洗净液不限于diw。从喷雾嘴131喷出的洗净液是从例举作为膜涂布去除装置4a所使用的冲洗液中加以选择。
[0239]
根据第2实施方式的衬底处理系统1p,能够执行图7所示的衬底处理。其中,在物理洗净工序(步骤s4)中,喷雾洗净单元130将保护对象面w1上形成着保护膜200且由第2旋转夹盘6b保持的状态下的衬底w的洗净对象面w2洗净。详细来说,执行喷雾洗净(物理洗净),即,通过对衬底w的洗净对象面w2喷射大量洗净液的液滴d而对洗净对象面w2作用物理力,从而将洗净对象面w2洗净。
[0240]
具体来说,打开洗净液阀135且关闭排出阀138,电压施加单元140对压电元件139施加交流电压。由此,从喷雾嘴131朝向旋转状态的衬底w的上表面的中央区域,以液滴状态供给(喷出)洗净液(液滴供给工序)。此时,臂驱动机构133使摆动臂132沿衬底w的半径方向移动,由此能够将衬底w的整个洗净对象面w2喷雾洗净。
[0241]
根据第2实施方式,喷雾洗净单元130包含喷雾嘴131,该喷雾嘴131通过向洗净对象面w2喷射洗净液的液滴d而将洗净对象面w2喷雾洗净。喷雾洗净与利用连续流的液体实施的洗净相比,会对洗净对象面w2赋予更大的冲击能。因此,与利用连续流的液体实施的洗净相比,污染物质容易飞溅。
[0242]
如第2实施方式,只要在整个保护对象面w1上涂布保护膜200,就能够通过物理洗净将洗净对象面w2充分地洗净,并且能够抑制由物理洗净引起的保护对象面w1的污染。
[0243]
例如在使用diw作为洗净液,使用氨水作为去除液的情况下,保护膜200在洗净液中的溶解性比保护膜200在去除液中的溶解性低。即使在洗净对象面w2上所附着的洗净液沿着衬底w的周缘部移动到保护对象面w1的情况下,或冲撞洗净对象面w2的洗净液从洗净对象面w2溅起而悬浮在衬底w的周围,并附着在保护对象面w1的情况下,也能够抑制由洗净液引起的非期望的保护膜200的溶解。
[0244]
<第3实施方式>
[0245]
图13a是用来说明本发明的第3实施方式的衬底处理系统1q所具备的衬底处理装置2q的构成的俯视图。图13b是用来说明第3实施方式的衬底处理装置2q的构成的图解性正视图。在图13a及图13b、以及下述图14~图17中,对于与所述图1~图12所示的构成等同的构成,标注与图1等相同的参照符号,并省略其说明。
[0246]
衬底处理装置2q与第1实施方式的衬底处理装置2(参照图1a)不同,构成为能够通过干式处理将保护膜从保护对象面w1去除。详细来说,衬底处理装置2q包含多个液体处理装置4、多个搬送机器人、翻转单元5a(第1翻转单元)、翻转单元5b(第2翻转单元)、及对衬底w执行干式处理的多个干式处理装置14。
[0247]
第3实施方式中,多个搬送机器人包含:移载传送机器人ir,针对装载口lp上的载具c进行衬底w的搬入及搬出;第1主搬送机器人cr1,与移载传送机器人ir之间进行衬底w的交接,且针对多个液体处理装置4进行衬底w的搬入及搬出;以及第2主搬送机器人cr2,与第1主搬送机器人cr1之间进行衬底w的交接,且针对多个干式处理装置14进行衬底w的搬入及搬出。
[0248]
翻转单元5a从移载传送机器人ir及第1主搬送机器人cr1接收衬底w,使衬底w翻转,以使得衬底w的姿势变化为第1姿势及第2姿势中的任一个。翻转单元5b从第1主搬送机器人cr1及第2主搬送机器人cr2接收衬底w,使衬底w翻转,以使得衬底w的姿势变化为第1姿势及第2姿势中的任一个。翻转单元5a及翻转单元5b的构成及动作与图5a~图5d所示的翻转单元5相同。
[0249]
移载传送机器人ir、第1主搬送机器人cr1及第2主搬送机器人cr2配置在搬送路径tr上。翻转单元5a在搬送路径tr上,位于移载传送机器人ir与第1主搬送机器人cr1之间。翻转单元5b在搬送路径tr上,位于第1主搬送机器人cr1与第2主搬送机器人cr2之间。
[0250]
各搬送机器人皆为包含一对多关节臂ar及一对机械手h的多关节臂机器人,所述一对机械手h以彼此上下隔开的方式分别设置在一对多关节臂ar的前端。各搬送机器人所具备的机械手h构成为与洗净对象面w2及保护对象面w1中的朝向下侧的面的周缘部接触并保持衬底w。
[0251]
多个液体处理装置4包含:多个膜涂布装置4c,对衬底w的保护对象面w1涂布保护膜;以及多个物理洗净装置4b,对衬底w的洗净对象面w2执行物理洗净。多个干式处理装置14包含从衬底w的保护对象面w1去除保护膜的多个膜去除装置14a。
[0252]
多个液体处理装置4形成了分别配置在水平分离的4个位置上的4个液体处理塔。各液体处理塔包含沿上下方向积层的多个(图13b的例子中为3个)液体处理装置4。4个液体处理塔在搬送路径tr的两侧各配置2个。多个干式处理装置14形成了2个干式处理塔,这两个干式处理塔相比于4个液体处理塔,配置在与移载传送机器人ir侧相反的一侧。2个干式处理塔在搬送路径tr的两侧各配置1个。
[0253]
该实施方式中,移载传送机器人ir侧的2个处理塔包含多个膜涂布装置4c,与移载传送机器人ir为相反侧的2个处理塔包含多个(图13b的例子中为3个)物理洗净装置4b。2个干式处理塔包含多个膜去除装置14a。
[0254]
如图14所示,膜涂布装置4c除了移动喷嘴9以外,具有与第1实施方式的膜涂布去除装置4a(参照图3)相同的构成。详细来说,保护膜形成液配管41直接连接在膜涂布装置4c所具备的移动喷嘴9,移动喷嘴9以不喷出去除液的方式构成。另外,膜涂布装置4c未设有冲洗液及残渣去除液的供给单元,即固定喷嘴10及中央喷嘴11。
[0255]
如图13a所示,各膜去除装置14a例如包含第3腔室8c,该第3腔室8c收容由表面被实施了阳极氧化处理(氧化铝膜处理)的铝或不锈钢等金属构成的处理容器150。第3腔室8c与第1腔室8a同样,具有出入口(未图示)及挡闸单元(未图示)。
[0256]
多个搬送机器人(移载传送机器人ir、第1主搬送机器人cr1及第2主搬送机器人cr2)构成在多个载具c(多个装载口lp)、翻转单元5、第1旋转夹盘6a、第2旋转夹盘6b及处理容器150之间搬送衬底w的搬送单元。
[0257]
图15是膜去除装置14a的示意性剖视图。膜去除装置14a还包含:处理容器150;处理气体配管152,将处理气体从处理气体供给部151引导至处理容器150内;排气配管153,排出处理容器150内的气体氛围;以及压力调节阀154,介装在排气配管153,调节处理容器150内的压力;以及等离子体产生单元155(干式去除单元),使处理容器150内的处理气体变化为等离子体。等离子体产生单元155包含:上电极156,配置在衬底w的上方;以及下电极157(第3基座),与上电极156对向地配置,载置衬底w。
[0258]
在下电极157,电连接着电力供给装置160。电力供给装置160对下电极157高频电力(等离子体激励用高频电力)。电力供给装置160包含滤波器、匹配器、电源等。在处理容器150的侧壁,设有衬底w的搬入搬出口150a,处理容器150具有使搬入搬出口150a打开或关闭的闸阀150b。衬底w通过载置在下电极157上,而水平地保持在特定的保持位置(图15所示的衬底w的位置、第3保持位置)。
[0259]
虽未图示,但也可设有用来将衬底w从下电极157抬起的多个顶起销,多个顶起销能够在退避位置与抬起位置之间移动,该退避位置的前端部位于比下电极157的上表面靠下侧,该抬起位置的前端部位于比下电极157的上表面靠上侧。
[0260]
处理气体供给部151例如包含:气体供给源,供给处理容器150内的衬底的工艺处理或处理容器150内的清洗处理等所需的处理气体、冲洗气体等;及控制从气体供给源的气体导入的阀及质量流量控制器。
[0261]
等离子体产生单元155能使处理容器150内的处理气体变化为等离子体,通过氧自由基等的分解反应或氧化反应等化学反应,使衬底w上的保护膜直接气化而不经过液体状态。处理气体例如为灰化气体。灰化气体是包含氧气(o2气体)及二氧化碳(co2气体)中的至少一种的气体。
[0262]
图16是用来说明第3实施方式的衬底处理系统1q的具体的衬底处理流程的流程图。第3实施方式的衬底处理系统1q实施的衬底处理中,与图7所示的衬底处理不同,省略了冲洗工序(步骤s7)、残渣去除工序(步骤s8)及干燥工序(步骤s9)。以下,以与第1实施方式的衬底处理的不同点为中心,对第3实施方式的衬底处理系统1q实施的衬底处理的一例进行说明。
[0263]
详细来说,首先,由移载传送机器人ir将未处理衬底w从载具c搬出。移载传送机器人ir经由翻转单元5a,将衬底w递交至第1主搬送机器人cr1。第1主搬送机器人cr1将从移载传送机器人ir接收到的衬底w搬送到膜涂布装置4c内,递交至第1旋转夹盘6a。
[0264]
衬底w以第1姿势收容在载具c内(参照图13b)。因此,被递交至第1旋转夹盘6a后,衬底w的姿势也维持为第1姿势。然后,与第1实施方式的衬底处理同样,利用膜涂布装置4c,对衬底w的保护对象面w1涂布保护膜200(参照图8a~图8c)。换句话说,利用膜涂布装置4c,执行保护膜形成液供给工序(步骤s1)及保护膜形成工序(步骤s2)。
[0265]
在保护对象面w1上形成着保护膜200的状态下,利用第1主搬送机器人cr1将衬底w从膜涂布装置4c搬出。利用第1主搬送机器人cr1以机械手h与洗净对象面w2的周缘部接触的状态搬送衬底w。从膜涂布装置4c搬出的衬底w由第1主搬送机器人cr1搬入翻转单元5a。利用翻转单元5a将被搬入翻转单元5a的衬底w翻转,使衬底w的姿势从第1姿势变化为第2姿势(步骤s3:第1翻转工序)。详细来说,翻转单元5a与衬底w的周缘部接触并且使衬底w翻转,使保护对象面w1上形成着保护膜200的状态下的衬底w的姿势从第1姿势变化为第2姿势。
[0266]
经翻转单元5a翻转后的衬底w由第1主搬送机器人cr1从翻转单元5a搬出。利用第1主搬送机器人cr1,以机械手h与保护对象面w1的周缘部接触的状态搬送衬底w。衬底w由第1主搬送机器人cr1搬入物理洗净装置4b内,递交至第2旋转夹盘6b。然后,与第2实施方式的衬底处理同样,利用物理洗净装置4b对衬底w的洗净对象面w2执行物理洗净(物理洗净工序:步骤s4)。
[0267]
物理洗净工序(步骤s4)之后,衬底w由第1主搬送机器人cr1从物理洗净装置4b搬出,之后,搬入翻转单元5b。利用翻转单元5b将被搬入翻转单元5b的衬底w翻转,使衬底w的姿势变化为第1姿势(步骤s5:第2翻转工序)。详细来说,翻转单元5b与衬底w的周缘部接触并使衬底w翻转,使保护对象面w1上形成着保护膜200的状态下的衬底w的姿势从第2姿势变化为第1姿势。
[0268]
经翻转单元5b翻转后的衬底w由第2主搬送机器人cr2从翻转单元5b搬出。利用第2
主搬送机器人cr2以机械手h与洗净对象面w2的周缘部接触的状态搬送衬底w。然后,衬底w由第2主搬送机器人cr2搬入膜去除装置14a内,并交递给等离子体产生单元155。详细来说,将衬底w载置在下电极157上。由此,如图15所示,将衬底w以第1姿势保持在第3保持位置(第3衬底保持工序)。像这样,下电极157保持通过翻转单元5b使姿势从第2姿势变化为第1姿势的状态的衬底。下电极157是第3衬底保持单元的一例。
[0269]
然后,从处理气体供给部151向处理容器150内导入灰化气体,且以处理容器150内的压力成为特定的灰化设定压力的方式控制压力调节阀154的开度(灰化气体导入工序)。接着,从电力供给装置160施加高频。例如,以1000w的功率施加40mhz的高频。由此,激励氧气的等离子体,保护膜200通过处理容器150内的等离子体所引起的化学反应,不经由液体而直接变化为气体。由此,从衬底w上去除保护膜200(保护膜气化去除工序)。高频施加开始后经过特定时间之后,来自电力供给装置160的高频停止,氧气导入停止。
[0270]
像这样,等离子体产生单元155通过对保护对象面w1上形成着保护膜200且保持在下电极157的状态下的衬底w的保护对象面w1执行等离子体处理,而从保护对象面w1去除保护膜200。
[0271]
之后,第2主搬送机器人cr2进入膜去除装置14a,从下电极157接收处理过的衬底w,并向膜去除装置14a外搬出。从膜去除装置14a搬出的衬底w依序经过翻转单元5b、第1主搬送机器人cr1及翻转单元5a,从第2主搬送机器人cr2递交至移载传送机器人ir。移载传送机器人ir在将衬底w的姿势维持为第1姿势的状态下,将衬底w收容到载具c中(也参照图13b)。
[0272]
另外,与图15所示的例子不同,也可构成为通过光照射而去除保护膜200。例如如图17所示,膜去除装置14a也可包含:处理容器150;基座170(第3基座),配置在处理容器150内,载置衬底w;光照射单元171(干式去除单元),朝向载置在基座170上的衬底w的保护对象面w1照射uv(ultraviolet,紫外线)等光。该情况下,衬底w上的保护膜200因光照射而分解,不经过液体状态而直接变化为气体。光照射单元171例如包含多个光照射灯。在光照射单元171,连接着对光照射灯供给电力的电力供给装置172。
[0273]
在使用光照射单元171去除保护膜200的情况下,被搬入膜去除装置14a内的衬底w载置在基座170上,因此如图17所示,以第1姿势保持在第3保持位置(第3衬底保持工序)。基座170是第3衬底保持单元的一例。
[0274]
然后,从电力供给装置172供给电力,并从光照射单元171照射uv等光(光照射工序)。保护膜200因光照射,不经过液体状态而直接变化为气体,由此被从衬底w上去除(保护膜气化去除工序)。
[0275]
像这样,光照射单元171通过对保护对象面w1上形成着保护膜200且保持在基座170的状态下的衬底w的保护对象面w1执行光照射处理,而从保护对象面w1去除保护膜200。
[0276]
如上所述,膜去除装置14a对衬底w的保护对象面w1执行等离子体处理或光照射处理,由此能够不对衬底w供给液体地,从衬底w的保护对象面w1去除保护膜200。因此,能够省去干燥衬底w的工夫,能够抑制将保护对象面w1干燥时产生水印(干燥痕迹)。
[0277]
<保护膜形成液的一例>
[0278]
以下,对所述实施方式中使用的保护膜形成液中的各成分的一例进行说明。
[0279]
以下,“c
x~y”、“c
x~cy”及“c
x”等记载意指分子或取代基中的碳数。例如,c
1~6
烷基意
指具有1以上且6以下的碳的烷基链(甲基、乙基、丙基、丁基、戊基、己基等)。
[0280]
在聚合物具有多种重复单位的情况下,这些重复单位共聚。只要未特别限定说明,则它们的共聚可以是交替共聚、无规共聚、嵌段共聚、接枝共聚、或所述共聚形式混合存在的情况中的任一种。以结构式表示聚合物或树脂时,与括弧一起标注的n或m等表示重复数。
[0281]
<低溶解性成分>
[0282]
(a)低溶解性成分含有酚醛、聚羟基苯乙烯、聚苯乙烯、聚丙烯酸衍生物、聚马来酸衍生物、聚碳酸酯、聚乙烯醇衍生物、聚甲基丙烯酸衍生物、及它们的组合共聚体中的至少一种。优选(a)低溶解性成分也可含有酚醛、聚羟基苯乙烯、聚丙烯酸衍生物、聚碳酸酯、聚甲基丙烯酸衍生物、及它们的组合共聚体中的至少一种。更优选(a)低溶解性成分也可含有酚醛、聚羟基苯乙烯、聚碳酸酯、及它们的组合共聚体中的至少一种。酚醛也可以是酚系酚醛。
[0283]
保护膜形成液也可含有1个或组合含有2个以上所述适例作为(a)低溶解性成分。例如,(a)低溶解性成分也可含有酚醛与聚羟基苯乙烯这两者。
[0284]
一优选态样是,(a)低溶解性成分通过干燥而膜化,且所述膜大部分未被去除液溶解,而是以保持着去除对象物的状态剥落。此外,(a)低溶解性成分的极少一部分被去除液溶解的态样也是被容许的。
[0285]
优选(a)低溶解性成分不含氟及/或硅,更优选两者皆不含。
[0286]
所述共聚优选无规共聚、嵌段共聚。
[0287]
作为(a)低溶解性成分的具体例,可例举下述化学式1~化学式7所示的各化合物,但并非要以此限定权利范围。
[0288]
[化1]
[0289][0290]
[化2]
[0291][0292]
[化3]
[0293][0294]
(星号*表示与邻接构成单位的键结)
[0295]
[化4]
[0296][0297]
(r意指c
1~4
烷基等取代基。星号*表示与邻接构成单位的键结)
[0298]
[化5]
[0299][0300]
[化6]
[0301][0302]
[化7]
[0303][0304]
(me意指甲基。星号*表示与邻接构成单位的键结)
[0305]
(a)低溶解性成分的重量平均分子量(mw)优选150~500,000,更优选300~300,000,进而优选500~100,000,进而更优选1,000~50,000。
[0306]
(a)低溶解性成分可通过合成而获得。另外,也可购买。在购买的情况下,作为供应商,可例举以下例子。也可由供应商合成出(a)聚合物。
[0307]
酚醛:昭和化成股份有限公司、旭有机材股份有限公司、群荣化学工业股份有限公司、住友电木股份有限公司;
[0308]
聚羟基苯乙烯:日本曹达股份有限公司、丸善石油化学股份有限公司、东邦化学工业股份有限公司;
[0309]
聚丙烯酸衍生物:日本触媒股份有限公司;
[0310]
聚碳酸酯:sigma-aldrich;
[0311]
聚甲基丙烯酸衍生物:sigma-aldrich;
[0312]
相对于保护膜形成液的总质量,(a)低溶解性成分为0.1~50质量%,优选0.5~30质量%,更优选1~20质量%,进而优选1~10质量%。也就是说,将保护膜形成液的总质量设为100质量%,以此为基准,(a)低溶解性成分为0.1~50质量%。即,“相对于
…”
也可改称为“以
…
为基准”。只要未特别说明,下文也同样如此。
[0313]
<高溶解性成分>
[0314]
(b)高溶解性成分是(b')裂解促进成分。(b')裂解促进成分含有烃,还含有羟基(-oh)及/或羰基(-c(=o)-)。(b')裂解促进成分为聚合物的情况下,1种构成单位的每一单位皆含有烃,还含有羟基及/或羰基。所谓羰基,可例举羧酸(-cooh)、醛、酮、酯、酰胺、烯酮,优
选羧酸。
[0315]
使保护膜形成液干燥而在衬底上形成保护膜,在去除液将保护膜剥离时,可预料到(b)高溶解性成分会创造出成为保护膜剥落的契机的部分;这一点并非意图限定权利范围,也不受理论约束。因此,(b)高溶解性成分优选在去除液中的溶解性比(a)低溶解性成分高的成分。关于(b')裂解促进成分含有酮作为羰基的态样,可例举环形的烃。作为具体例,可例举1,2-环己烷二酮或1,3-环己烷二酮。
[0316]
作为更具体的态样,(b)高溶解性成分由下述(b-1)、(b-2)及(b-3)中的至少任一个表示。(b-1)是包含1~6个下述化学式8作为构成单位(1~4个为宜),且各构成单位以连结基(连接子l1)键结的化合物。此处,连接子l1可为单键,也可为c
1~6
烷撑。所述c
1~6
烷撑作为连接子将构成单位连结,其并不限定于2价基。优选2~4价。所述c
1~6
烷撑可为直链,也可为支链。
[0317]
[化8]
[0318][0319]
cy1为c
5~30
的烃环,优选苯基、环己烷或萘基,更优选苯基。作为优选态样,连接子l1将多个cy1连结。
[0320]
r1分别独立为c
1~5
烷基,优选甲基、乙基、丙基或丁基。所述c
1~5
烷基可为直链,也可为支链。
[0321]nb1
为1、2或3,优选1或2,更优选1。n
b1'
为0、1、2、3或4,优选0、1或2。
[0322]
下述化学式9是使用连接子l9表示化学式8中所记载的构成单位的化学式。连接子l9优选单键、亚甲基、乙撑或丙撑。
[0323]
[化9]
[0324][0325]
作为(b-1)的适例,可例举2,2-双(4-羟基苯基)丙烷、2,2'-亚甲基双(4-甲基苯酚)、2,6-双[(2-羟基-5-甲基苯基)甲基]-4-甲基苯酚、1,3-环己烷二醇、4,4'-二羟基二苯、2,6-萘二酚、2,5-二-第三丁基对苯二酚、1,1,2,2-四(4-羟基苯基)乙烷,但并非要以此限定权利范围。它们也可通过聚合或缩合而获得。
[0326]
作为一例,列举下述化学式10所示的2,6-双[(2-羟基-5-甲基苯基)甲基]-4-甲基苯酚进行说明。该化合物在(b-1)中具有3个化学式8的构成单位,且构成单位以连接子l1(亚甲基)键结。n
b1
=n
b1'
=1,r1为甲基。
[0327]
[化10]
[0328][0329]
(b-2)由下述化学式11表示。
[0330]
[化11]
[0331][0332]r21
、r
22
、r
23
及r
24
分别独立为氢或c
1~5
的烷基,优选氢、甲基、乙基、第三丁基或异丙基,更优选氢、甲基或乙基,进而优选甲基或乙基。
[0333]
连接子l
21
及连接子l
22
分别独立为c
1~20
的烷撑、c
1~20
的环烷撑、c
2~4
的伸烯基、c
2~4
的伸炔基、或c
6~20
的伸芳基。这些基也可经c
1~5
的烷基或羟基取代。此处,所谓伸烯基,意指具有1个以上双键的二价烃,所谓伸炔基,意指具有1个以上三键的二价烃基。连接子l
21
及连接子l
22
优选c
2~4
的烷撑、乙炔(c2的伸炔基)或苯撑,更优选c
2~4
的烷撑或乙炔,进而优选乙炔。
[0334]nb2
为0、1或2,优选0或1,更优选0。
[0335]
作为(b-2)的适例,可例举3,6-二甲基-4-辛炔-3,6-二醇、2,5-二甲基-3-己炔-2,5-二醇,但并非要以此限定权利范围。作为另一实施方式,也可例举3-己炔-2,5-二醇、1,4-丁炔二醇、2,4-己二炔-1,6-二醇、1,4-丁烷二醇、顺式-1,4-二羟基-2-丁烯、1,4-苯二甲醇作为(b-2)的适例。
[0336]
(b-3)是包含由下述化学式12表示的构成单位,且重量平均分子量(mw)为500~10,000的聚合物。mw优选600~5,000,更优选700~3,000。
[0337]
[化12]
[0338][0339]
此处,r
25
为-h、-ch3或-cooh,优选-h或-cooh。也允许1个(b-3)聚合物包含分别由化学式12表示的2种以上构成单位。
[0340]
作为(b-3)聚合物的适例,可例举丙烯酸、马来酸、或它们的组合聚合体,但并非要以此限定权利范围。聚丙烯酸、马来酸丙烯酸共聚物是更佳的例子。
[0341]
若为共聚,则以无规共聚或嵌段共聚为宜,无规共聚更佳。
[0342]
作为一例,列举下述化学式13所示的马来酸丙烯酸共聚物进行说明。该共聚物包含于(b-3),具有由化学式12表示的2种构成单位,且一个构成单位中,r
25
为-h,另一个构成单位中,r
25
为-cooh。
[0343]
[化13]
[0344][0345]
当然,保护膜形成液也可含有1个或组合含有2个以上所述适例作为(b)高溶解性成分。例如,(b)高溶解性成分也可含有2,2-双(4-羟基苯基)丙烷与3,6-二甲基-4-辛炔-3,6-二醇这两者。
[0346]
(b)高溶解性成分也可为分子量80~10,000。高溶解性成分优选分子量90~5000,更优选100~3000。(b)高溶解性成分为树脂、聚合体或聚合物的情况下,分子量以重量平均分子量(mw)表示。
[0347]
(b)高溶解性成分可通过合成,也可通过购买而获得。作为供应商,可例举sigma-aldrich、东京化成工业、日本触媒。
[0348]
在保护膜形成液中,(b)高溶解性成分相对于(a)低溶解性成分的质量,优选1~100质量%,更优选1~50质量%。在保护膜形成液中,(b)高溶解性成分相对于(a)低溶解性成分的质量,进而优选1~30质量%。
[0349]
<溶剂>
[0350]
(c)溶剂优选包含有机溶剂。(c)溶剂也可具有挥发性。所谓具有挥发性,意指挥发性比水高。例如,1大气压下(c)溶剂的沸点优选50~250℃。1大气压下溶剂的沸点更优选50~200℃,进而优选60~170℃。1大气压下溶剂的沸点进而更优选70~150℃。也允许(c)溶剂含有少量纯水。(c)溶剂中含有的纯水相对于(c)溶剂整体,优选30质量%以下。溶剂中含有的纯水更优选20质量%以下,进而优选10质量%以下。溶剂中含有的纯水进而更优选5质量%以下。溶剂不含纯水(0质量%)也是一个优选实施方式。所谓纯水,以diw为宜。
[0351]
作为有机溶剂,可例举:异丙醇(ipa)等醇类;乙二醇单甲醚、乙二醇单乙醚等乙二醇单烷基醚类;乙二醇单甲醚乙酸酯、乙二醇单乙醚乙酸酯等乙二醇单烷基醚乙酸酯类;丙二醇单甲醚(pgme)、丙二醇单乙醚(pgee)等丙二醇单烷基醚类;丙二醇单甲醚乙酸酯(pgmea)、丙二醇单乙醚乙酸酯等丙二醇单烷基醚乙酸酯类;乳酸甲酯、乳酸乙酯(el)等乳酸酯类;甲苯、二甲苯等芳香族烃类;甲基乙基酮、2-庚酮、环己酮等酮类;n,n-二甲基乙酰胺、n-甲基吡咯啶酮等酰胺类,γ-丁内酯等内酯类;等等。这些有机溶剂可单独使用,或混合2种以上使用。
[0352]
作为优选的一态样,(c)溶剂所包含的有机溶剂可选自ipa、pgme、pgee、el、pgmea、及它们的任意组合。在有机溶剂为2种有机溶剂的组合的情况下,其体积比优选20∶80~80∶20,更优选30∶70~70∶30。
[0353]
相对于保护膜形成液的总质量,(c)溶剂为0.1~99.9质量%。相对于保护膜形成液的总质量,(c)溶剂优选50~99.9质量%,更优选75~99.5质量%。相对于保护膜形成液的总质量,(c)溶剂进而优选80~99质量%,进而更优选85~99质量%。
[0354]
<防腐成分>
[0355]
作为(d)防腐成分,除了bta以外,还可例举尿酸、咖啡因、喋呤、腺嘌呤、乙醛酸、葡萄糖、果糖、甘露糖等。
[0356]
<其它添加物>
[0357]
本发明的保护膜形成液也可还包含(e)其它添加物。作为本发明的一态样,(e)其它添加物包含表面活性剂、酸、碱、抗菌剂、杀菌剂、防腐剂或抗真菌剂(优选表面活性剂),也可包括它们的任意组合。
[0358]
作为本发明的一态样,相对于保护膜形成液中的(a)低溶解性成分的质量,(d)其它添加物(若为多种,则为它们的和)为0~100质量(优选0~10质量%,更优选0~5质量%,进而优选0~3质量%,进而更优选0~1质量%)。保护膜形成液不含(e)其它添加剂(0质量%)也是本发明的态样之一。
[0359]
<其它实施方式>
[0360]
本发明并不限定于以上所说明的实施方式,可进而以其它方式加以实施。
[0361]
例如,图1a及图13a的例子中示出了控制装置3设置在衬底处理装置2、2q内的例子,但控制装置3也可独立于衬底处理装置2、2q而配置。
[0362]
另外,所述实施方式的膜涂布去除装置4a中,保护膜形成液及去除液从移动喷嘴9喷出,冲洗液从固定喷嘴10喷出。然而,这些液体未必必须从所述实施方式中设置的喷嘴喷出,喷出各液体的喷嘴的形态并无限定。例如,也可构成为与残渣去除液同样,从中央喷嘴11的喷出口喷出。
[0363]
另外,在所述第1实施方式及第2实施方式中,利用膜涂布去除装置4a进行保护膜200的涂布及去除。然而,利用去除液实施的保护膜200的去除、衬底w的保护对象面w1的冲洗、及从保护对象面w1的残渣去除也可通过与实施保护膜200的涂布不同的液体处理装置4来执行。详细来说,也可利用无法进行保护膜200的涂布,且能向衬底w供给去除液、冲洗液及残渣去除液的膜去除装置来执行。该膜去除装置设有与第1旋转夹盘6a或第2旋转夹盘6b相同构成的旋转夹盘。该旋转夹盘(第3衬底保持单元)具有从下侧与衬底w对向的第3基座,将衬底w水平地保持。
[0364]
另外,所述第3实施方式的衬底处理的一例中,第1翻转工序由翻转单元5a执行,第2翻转工序由翻转单元5b执行。然而,第1翻转工序及第2翻转工序也可由任一翻转单元执行。
[0365]
另外,所述第1实施方式及第2实施方式中,利用单一的翻转单元5来执行第1翻转工序及第2翻转工序。然而,也可设有多个翻转单元5,利用各翻转单元5来执行第1翻转工序及第2翻转工序。
[0366]
另外,所述各实施方式中,对洗净对象面w2执行喷雾洗净或刷洗洗净等物理洗净。然而,洗净对象面w2未必必须通过物理洗净来洗净,也可通过供给呈连续流状的洗净液来洗净。
[0367]
保护膜形成液不限于以上所述。例如可使用抗蚀膜形成液或抗反射膜形成液作为保护膜形成液。该情况下,可使用显影液作为去除液。
[0368]
抗反射膜形成液含有溶剂及溶质。抗反射膜形成液中含有的溶质例如包含具有亲水性基的含有蒽骨架的抗反射膜形聚合体。含有蒽骨架的聚合体是含有选自由丙烯酸、甲基丙烯酸、乙烯醇、乙烯吡咯啶酮、丙烯酸酯、甲基丙烯酸酯所组成的群中的至少1种单体与含有蒽骨架的单体的共聚物。抗反射膜形成液中含有的溶剂例如为有机溶剂或水。抗反射膜形成液中含有的溶质也可为氟树脂。
[0369]
用作该溶剂的有机溶剂可根据目的,从如下材料中任意选用:(a)烃,例如n-己烷、n-辛烷、环己烷等;(b)醇,例如甲醇、乙醇、异丙醇等;(c)酮,例如丙酮、甲基乙基酮等;及(d)酯,例如乙酸甲酯、乙酸乙酯、乳酸乙酯等;(e)醚,例如乙醚、二丁醚等,(f)其它极性溶剂,例如二甲基甲酰胺、二甲基亚砜、甲基溶纤剂、溶纤剂、丁基溶纤剂、溶纤剂乙酸酯、烷基溶纤剂乙酸酯、丁基卡必醇、卡必醇乙酸酯等。
[0370]
抗蚀膜形成液含有溶剂、及作为溶解在溶剂中的溶质的抗蚀剂组合物。作为构成抗蚀膜的抗蚀剂组合物,可使用正型抗蚀剂组合物及负型组合物等。作为正型抗蚀剂组合物,例如可例举:包含醌二叠氮系感光剂与碱可溶性树脂构成的抗蚀剂组合物;化学增幅型
抗蚀剂组合物等。
[0371]
作为负型抗蚀剂组合物,例如可例举:包含聚肉桂酸乙烯等具有感光性基的高分子化合物的抗蚀剂组合物;含有芳香族叠氮化合物的抗蚀剂组合物、或含有如包含环化橡胶与双叠氮化合物的叠氮化合物的抗蚀剂组合物;包含重氮树脂的抗蚀剂组合物;包含附加聚合性不饱和化合物的光聚合性组合物;化学增幅型负型抗蚀剂组合物等。
[0372]
此处,作为包含醌二叠氮系感光剂与碱可溶性树脂的正型抗蚀剂组合物中使用的醌二叠氮系感光剂的例子,可例举1,2-苯甲醌二叠氮-4-砜酸、1,2-萘并醌二叠氮-4-砜酸、1,2-萘并醌二叠氮-5-砜酸、这些砜酸的酯或酰胺等。另外,作为碱可溶性树脂的例子,可例举酚醛树脂、聚乙烯酚、聚乙烯醇、丙烯酸或甲基丙烯酸的共聚物等。作为优选的酚醛树脂,可例举由苯酚、邻甲酚、间甲酚、对甲酚、二甲苯酚等酚类的1种或2种以上、甲醛、多聚甲醛等醛类的1种以上制造而成者。
[0373]
另外,化学增幅型抗蚀剂组合物可使用正型及负型中的任一种。化学增幅型抗蚀剂是通过放射线照射而产生酸,利用该酸的催化作用,实现化学变化,由此使放射线照射部分在显影液中的溶解性变化,而形成图案,该化学增幅型抗蚀剂例如可例举:由通过放射线照射而产生酸的酸产生化合物、在酸的存在下分解而生成酚性羟基或羧基等碱可溶性基的含有酸感应性基的树脂构成者;由碱可溶性树脂、交联剂及酸产生剂构成者。
[0374]
另外,也可使用通过使溶剂蒸发而形成水溶性膜的含水溶性聚合物的液体作为保护膜形成液。
[0375]
水溶性聚合物例如含有:羟丙基甲基纤维素邻苯二甲酸酯、羟丙基甲基纤维素乙酸邻苯二甲酸酯、羟丙基甲基纤维素乙酸琥珀酸酯、羟丙基甲基纤维素六氢邻苯二甲酸酯、羟丙基甲基纤维素、羟丙基纤维素、羟乙基纤维素、纤维素乙酸六氢邻苯二甲酸酯、羧甲基纤维素、乙基纤维素、甲基纤维素等纤维素系聚合体;n,n-二甲基丙烯酰胺、二甲氨基丙基甲基丙烯酰胺、n,n-二甲氨基丙基丙烯酰胺、n-甲基丙烯酰胺、二丙酮丙烯酰胺、二甲氨基乙基甲基丙烯酸酯、二乙氨基乙基甲基丙烯酸酯、n,n-二甲氨基乙基丙烯酸酯、丙烯酰吗啉、丙烯酸等丙烯系聚合体;聚乙烯醇、聚乙烯吡咯啶酮等乙烯系聚合体中的至少任一者。可仅使用这些水溶性聚合物中的1种,也可组合2种以上使用。
[0376]
在使用水溶性膜作为保护膜的情况下,通过使用diw作为去除液,保护膜溶解于去除液而被从衬底w上去除(溶解去除工序)。该情况下,可省略冲洗液的供给。即使与第1实施方式及第2实施方式同样地,保护膜是由低溶解性固体及高溶解性固体构成,在使用diw作为去除液的情况下,也可省略冲洗液的供给。
[0377]
该说明书中,使用“~”或“-”表示数值范围的情况下,只要未特别限定说明,则这两个符号两端的数值便包括在内,且单位共通。例如,5~25摩尔%表示5摩尔%以上且25摩尔%以下。
[0378]
此外,所述实施方式中,使用了“沿着”、“水平”、“铅直”等表述,但无需严格地“沿着”、“水平”、“铅直”。即,这些各表述容许制造精度、设置精度等任一个。
[0379]
以上对本发明的实施方式进行了详细说明,但它们只不过是为了明确本发明的技术内容而使用的具体例,本发明不应限定于这些具体例加以解释,本发明的范围仅受随附的权利要求书限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
