1.本实用新型涉及管道切割领域,特别地,涉及一种断管设备远程进刀控制装置。
背景技术:
2.断管设备广泛应用于长输油气管道的断管操作。在长输油气管道的断管过程中,一般动力站放在作业坑外,断管设备可以安装在待切割的管体上,通过动力站供应动力,断管设备产生断管(例如切管)动作。为使刀具逐渐接近管体实施切割,需控制进刀装置,根据切削情况,控制进刀量。
3.以分瓣式切管机为例,分瓣式切管机的操作步骤是将切管机安装在管道上,安装进刀控制装置,连接液压管路,开启液压动力站,通过进刀控制器控制进刀量。从分瓣式切管机的操作流程,可以看出,通过进刀控制器控制进刀量是分瓣式切管机进刀的重要一环。为根据切削情况控制进刀,操作人员必须站在切管机旁边进行操作。分瓣式管道切割机在切割管道时,如果人在近处进行操作,管道断裂瞬间可能因应力而弹开伤害附近的操作人员。在管道切透的时候,泄漏大量氮气,可能导致作业人员缺氧窒息。目前分瓣式管道切割机可以通过控制液压站启停从而远程控制停止切割,但是不能远程控制进刀器的动作,作业人员需要到管道切割位置进行操作,存在安全隐患。
技术实现要素:
4.针对现有技术中存在的不足,本实用新型的目的在于解决上述现有技术中存在的一个或多个问题。例如,本实用新型的目的之一在于实现对断管设备远程进刀控制装置的远程控制。
5.为了实现上述目的,本实用新型提供了一种断管设备远程进刀控制装置。
6.所述装置可包括依次连接的进退刀执行单元、远程控制线缆和手动拉紧单元,其中,进退刀执行单元安装在断管设备进刀机架上并包括杠杆机构,杠杆机构与进刀器连接,并在外力的作用下能够抬起进刀器;手动拉紧单元包括手柄;远程控制线缆的一端与杠杆机构连接,另一端与手柄连接。
7.进一步地,所述远程控制线缆可包括钢丝绳。
8.进一步地,所述远程控制线缆还可包括线管,所述钢丝绳穿在线管中。
9.进一步地,所述线管上还带有管帽。
10.进一步地,所述钢丝绳的长度可以为15~30m,例如16、19、20、21、24m等。
11.进一步地,所述手动拉紧单元还可包括线缆紧固机构,线缆紧固机构能够对所述远程控制线缆进行紧固。
12.进一步地,所述手动拉紧单元还包括固定板。
13.进一步地,所述切管机的进刀装置上可以安装有弹性机构,弹性机构能够使进刀装置在常态下保持闭合。
14.进一步地,所述进退刀执行单元还包括弹性机构,弹性机构安装在断管设备的进
刀装置上,并能够使进刀装置在常态下保持闭合。
15.进一步地,所述切管机的进刀装置上可安装有弹性机构。
16.进一步地,所述弹性机构可包括弹簧,例如预紧弹簧。
17.进一步地,所述断管设备可包括:分瓣式切管机、锯管机或爬管机。
18.与现有技术相比,本实用新型的有益效果可包括以下中的至少一项:
19.(1)本实用新型可实现断管设备(例如分瓣式切管机)进退刀的远程控制功能。操作人员不必靠近操作,避免了管道断开时因应力而弹开伤人,也能避免管道切透时泄漏大量从而导致操作人员氮气窒息事件,具有较好的安全实用价值。
20.(2)本实用新型可有效避免因切割时异常状况导致的刀具损坏,能一定程度上提升一次性切割成功,提高切割的成功率,具有一定的隐形经济价值。
21.(3)本实用新型的结构简便,制作成本低。
附图说明
22.通过下面结合附图进行的描述,本实用新型的上述和其他目的和特点将会变得更加清楚,其中:
23.图1示出了本实用新型的断管设备远程进刀控制装置各单元的一个连接示意图;
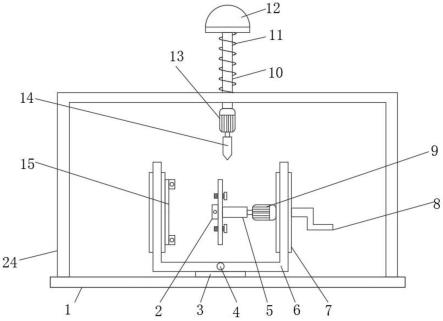
24.图2示出了本实用新型的杠杆机构的一个结构示意图;
25.图3示出了本实用新型的手动拉紧单元的一个结构示意图。
26.主要附图标记说明:
27.1-进退刀执行单元,11-杠杆机构,11a-通孔,12-弹性机构;2-远程控制线缆;3-手动拉紧单元,31-手柄,311-线缆紧固机构,32-固定板;41-进刀器,42-进刀机架。
具体实施方式
28.在下文中,将结合附图和示例性实施例详细地描述本实用新型的断管设备远程进刀控制装置。
29.需要说明的是,“第一”、“第二”、“第三”、“第四”等仅仅是为了方便描述和便于区分,而不能理解为指示或暗示相对重要性。“上”、“下”、“左”、“右”、“内”、“外”“前”、“后”等仅仅为了便于描述和构成相对的方位或位置关系,而并非指示或暗示所指的部件必须具有该特定方位或位置。
30.示例性实施例1
31.目前,市场上现有的进刀装置不能实现分瓣式切管机的远程控制,作业人员需要靠近断管设备进行操作,有受到机械损伤及缺氧窒息的风险。对此,本实用新型提供了一种专门用于远程控制断管设备断管时使用的远程进刀控制装置。该分瓣式切管机远程进刀控制装置,能够从远处(例如20m外的地方)有效控制分瓣式切割机的进刀及退刀,进而避免可能发生的机械损伤或氮气窒息,同时能优化切削过程,提升一次性切削成功率,具有一定的隐形经济价值。
32.图1示出了本实用新型的断管设备远程进刀控制装置各单元的一个连接示意图;图2示出了本实用新型的杠杆机构的一个结构示意图;图3示出了本实用新型的手动拉紧单元的一个结构示意图。本示例性实施例中的断管设备远程进刀控制装置,即为分瓣式切管
机远程进刀控制装置。
33.如图1所示,所述控制装置可包括依次连接的进退刀执行单元1、远程控制线缆2和手动拉紧单元3。
34.其中,进退刀执行单元1可以安装在断管设备的进刀机架42上并包括如图2所示的杠杆机构11。杠杆机构11可以与进刀装置上的进刀器41连接,并在外力的作用下能够抬起进刀器41。所述外力可以是手动拉紧单元3通过远程控制线缆2传递的力。
35.手动拉紧单元3可包括如图3所示的手柄。
36.远程控制线缆2的一端可以与如图2所示的杠杆机构11连接,另一端可以与图3所示的手柄31连接。
37.在本实施例中,进退刀执行单元1可以拆卸也可以适中安装在切管机进刀器上。
38.在本实施例中,如图2所示,作为本实用新型的另一种实现方式,杠杆机构11可以类l形结构,其一端可以铰接在进刀机架42上,另一端可以与进刀器41连接,另一端上还可还开设有用于连接远程控制线缆2的通孔11a。
39.进一步地,杠杆机构11可包括第一杆件、第二杆件和连接件,第一杆件的一端通过连接件与第二杆件的一端连接。在未连接时,第一、第二杆件之间的夹角可以发生改变,在夹角确定后,可通过连接件将第一、第二杆件进行固定,这样能够实现对不同切管机的适用。
40.在本实施例中,作为本实用新型的另一种实现方式,杠杆机构11可包括相铰接的第三杆件和第四杆件,第三杆件的可固定在进刀机架42上,例如通过可张紧、放松的钢绳夹紧到进刀刀架上。第四杆件未与第三杆件铰接的一端可以与进刀器41连接,该端上还可还开设有用于连接远程控制线缆2的通孔。
41.本实用新型的杠杆机构11不限于以上两种形式,还可以是机械领域的其他杠杆结构,只要是能实现目的即可。
42.在本实施例中,如图2所示,进退刀执行单元1还可包括弹性机构12,弹性机构12安装在进刀装置上,并能够使进刀装置在常态下保持闭合。如图2所示,弹性机构12的两段可分别与进刀器41和进刀机架42连接。
43.进一步地,弹性机构可包括弹簧,例如预紧弹簧。当杠杆机构11动作时,其抬起进刀器41,预紧弹簧拉伸,此时进刀装置处于打开状态,切管机不进给。
44.在本实施例中,远程控制线缆2可包括线管、内部的细钢丝绳及管帽组成。细钢丝绳可在线管内滑动。将线管用管帽固定后,细钢丝绳相对线管的相对运动,能提供进退刀执行单元1动作的力。
45.在本实施例中,手柄31可以是本领域的常规形状和结构。作为本实用新型的一种实现方式,可通过拉动手柄来远程控制进退刀执行单元1的动作。
46.在本实施例中,作为本实用新型的另一种实现方式,如图3所示,所述手动拉紧单元3还包括固定板32,手柄上设置有线缆紧固机构311。
47.固定板32能够固定在其他装置或物体上。
48.手柄31可以安装在固定板32上,但固定板32不限制手柄31的活动,例如手柄31还可从固定板32上分离。
49.手柄31上设置有线缆紧固机构311,线缆紧固机构311能够对远程控制线缆2背离
进退刀执行单元1的一段进行固定。线缆紧固机构311可包括绳索缠绕部和锁紧部,通过远程控制线缆2在缠绕部上的缠绕或放开动作可调整进退刀执行单元1与手动拉紧单元之间的长度,在长度合适后,可通过锁紧部来锁紧远程控制线缆2。
50.手动拉紧单元3上可固定带有管帽的线管,同时可以固定钢丝绳,利用杠杆原理拉动钢丝绳,可使钢丝绳及线管产生相对运动,从而远程控制进刀退刀执行机构的动作,从而控制分瓣式切管机的进刀及退刀操作。
51.为了更好地理解本实用新型的上述示例性实施例,下面结合图1、图2和图3对针对分瓣式切管机的远程进刀控制装置的使用过程做进一步说明。
52.所述远程进刀控制装置的使用过程可包括:
53.(1)使用时将进退刀执行单元1安装在切管机进刀器上,测试弹簧预紧力,确保进刀器的滑动模块滑动顺畅,预紧力适中。
54.(2)使用远程控制线缆2将进退刀执行单元1、手动拉紧单元3连接起来。在连接时要注意调节线缆的紧固位置,保证进退刀执行单元1有足够的行程来完成进刀退刀动作。在调整好线缆紧固位置后,可在手动拉紧单元3上标注出进刀退刀时手柄31的位置。
55.(3)检查安装好切管机,连接好动力管道,启动液压站,按动按钮,使切管机开始运转。使用远程进刀控制装置控制进刀器进刀,在正常状态下,手动拉紧单元3处于松弛状态,切管机正常进刀切削。当切削量较大,出现异常声音、异常震动等情况时,可拉动手动拉紧单元3的手柄31,使进刀器动作,刀具正常切割,但是不进给,带异常情况消失后,松开手动拉紧单元3的手柄31。
56.在本实用新型不限于针对分瓣式切管机,还可对多种形式的断管设备,如锯管机、爬管机等断管设备均可实现远程控制进刀,进行本领域技术人员所能够实现的部分微调即可。
57.综上,本实用新型的断管设备远程进刀控制装置的优点可包括:
58.(1)进退刀执行机构采用杠杆结构配合弹簧预紧,可实现执行机构的常闭状态,符合现场作业时的实际情况。在有切削异常情况时,动作执行机构,及时停止进给能避免切削事故的发生。
59.(2)远程控制线缆能保证操作人员在作业坑外远距离(例如20m)进行操作,避免管道断开时因应力而摆动伤人,也能避免管道断开时大量氮气集聚在作业坑造成人员的窒息。
60.(3)手动线缆拉紧单元为机械式的机构,未采用电子执行机构,不产生电火花,能够满足油气场所使用的需求,具有一定的防爆属性。手动线缆拉紧装置具有行程可调的优点,使用多种形式的断管设备。
61.尽管上面已经通过结合示例性实施例描述了本实用新型,但是本领域技术人员应该清楚,在不脱离权利要求所限定的精神和范围的情况下,可对本实用新型的示例性实施例进行各种修改和改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。