1.本实用新型涉及机器人机构领域,具体地,涉及手腕机构及机器人。
背景技术:
2.随着机器人的广泛普及,越来越多的机器人被应用到生产与生活中去,因此也对机器人的要求越来越高。在拟人机器人中,为了应对越来越高的要求,适应各种情况,对机器人的整体自由程度以及其稳定性也有了更高的要求。而手腕机构是实现高自由度和稳定性的重要部件,故需要提供一种结构简洁且具有高自由度和稳定性的机器人手腕机构。
3.专利文献cn102218741b提供一种有效地回避线条体与周边设备的干涉并且以简单的结构实现高刚性化的线条体配设机构。线条体配设机构具有引导部件,该引导部件包括安装在手腕端部的第一板状部件、与第一板状部件相对配置的第二板状部件、以及将第一板状部件和第二板状部件相互连接的连接部件,连接部件的垂直于手腕轴的剖面中的剖面形状包含手腕轴,并且从手腕轴向第一半径方向延伸线条体的剖面方向长度的1/2以上,而且向与第一半径方向轴对称的第二半径方向延伸该剖面方向长度的1/2以下,引导部件在预先规定的旋转角度范围内的任意旋转角度位置时,线条体配设成都与第二板状部件及连接部件的一方或双方抵接。
4.专利文献cn1178495a提供一种多关节机器人的手腕机构,其中,臂端部有对臂长度方向倾斜的倾斜臂和在其与回转轴对面侧上设有与回转轴平行的安装座及固定于倾斜臂端部上的壳体,驱动手腕部的驱动部由固定在倾斜臂内的驱动电机和壳体上的安装座上的减速器构成,驱动电机输出轴与减速器输入轴通过两个伞齿轮啮合。
5.上述现有专利未能实现手腕机构在结构简洁的同时具有高自由度和稳定性。
技术实现要素:
6.针对现有技术中的缺陷,本实用新型的目的是提供一种手腕机构及机器人。
7.根据本实用新型提供的一种手腕机构,包括:手掌、手腕第一舵盘、手腕拉杆、手腕第二舵盘、手腕第一电机以及手腕第二电机;
8.所述手掌连接所述手腕第一电机端面并通过所述手腕第一电机带动绕所述手腕第一电机轴向旋转;
9.所述手腕第一电机安装在所述手腕第二舵盘上并通过所述手腕第二舵盘带动转动;
10.所述手腕第二舵盘通过所述手腕拉杆连接所述手腕第一舵盘;
11.所述手腕第二电机连接所述手腕第一舵盘端面并带动所述手腕第一舵盘绕所述手腕第二电机轴向旋转;
12.当所述第二电机转动,所述手腕第一舵盘转动并通过所述手腕拉杆拉动所述手腕第二舵盘转动,所述手腕第二舵盘带动所述手腕第一电机和所述手掌俯仰运动。
13.优选地,所述手腕第一舵盘和所述手腕第二舵盘安装在手腕拉杆壳上;
14.所述手腕拉杆壳一端设置为舵盘安装板,所述舵盘安装板垂直向所述手腕拉杆壳另一端延伸出横滚电机安装板;
15.所述手腕第一舵盘和所述手腕第二舵盘安装在所述舵盘安装板上并允许相对所述舵盘安装板自转。
16.优选地,所述横滚电机安装板背向所述舵盘安装板一侧安装前掌手掌横滚电机输出轴;
17.所述前掌手掌横滚电机输出轴带动所述手腕拉杆壳绕所述前掌手掌横滚电机输出轴轴向旋转。
18.优选地,所述手腕第二电机端面平行于所述舵盘安装板和所述手腕第一舵盘;
19.所述手腕第一电机轴线平行于所述舵盘安装板、所述手腕第二舵盘和所述横滚电机安装板;
20.所述手腕第一电机和所述手腕第二电机安装在所述手腕拉杆壳上。
21.优选地,所述手腕拉杆设置有两个;
22.两个所述手腕拉杆平行。
23.优选地,两个所述手腕拉杆两端分别通过拉杆卡扣安装在所述手腕第一舵盘和所述手腕第二舵盘上;
24.所述手腕拉杆通过手腕舵盘轴承连接并相对所述手腕第一舵盘和所述手腕第二舵盘转动;
25.所述手腕第一舵盘、所述手腕第二舵盘和两个所述手腕拉杆构成手腕并联拉杆结构;
26.所述手腕第二电机通过所述手腕并联拉杆结构带动所述手掌做俯仰运动。
27.优选地,所述手掌通过手掌连接结构连接所述手腕第一电机;
28.所述手掌连接结构一端固定安装在所述手腕第一电机端面,所述手腕第一电机带动所述手掌连接结构绕所述手腕第一电机轴线转动。
29.优选地,所述手掌连接结构另一端固定连接所述手掌;
30.当所述手腕第一电机转动时,所述手掌连接结构左右摇动并带动所述手掌左右摇动。
31.优选地,所述手腕并联拉杆结构、所述手腕第二电机以及所述手腕拉杆壳外侧安装前臂手腕外壳;
32.所述手掌背向所述手腕第一电机一端转动安装多个手指。
33.优选地,一种机器人采用所述手腕机构。
34.与现有技术相比,本实用新型具有如下的有益效果:
35.1、本设计通过手腕并联拉杆结构实现手掌放俯仰运动,该结构紧凑,减小手腕机构体积;
36.2、本设计能实现机器人手腕机构的多自由度运动。
附图说明
37.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
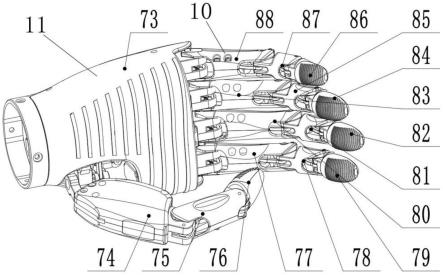
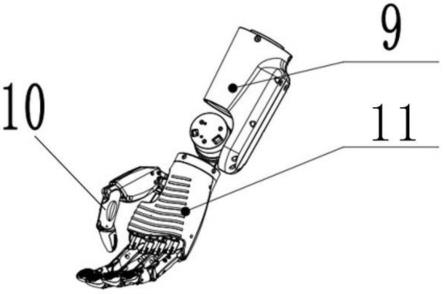
38.图1为手腕机构结构示意图;
39.图2为电机位置关系图;
40.图3为手腕并联拉杆结构示意图。
41.图中所示:
42.具体实施方式
43.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
44.实施例1
45.如图1至图3所示,一种手腕机构,可用于机器人,包括:手掌11、手腕第一舵盘47、手腕拉杆48、手腕第二舵盘49、手腕第一电机70以及手腕第二电机701;手掌11连接手腕第一电机70端面并通过手腕第一电机70带动绕手腕第一电机70轴向旋转,手腕第一电机70安装在手腕第二舵盘49上并通过手腕第二舵盘49带动转动,手腕第二舵盘49通过手腕拉杆48连接手腕第一舵盘47,手腕第二电机701连接手腕第一舵盘47端面并带动手腕第一舵盘47绕手腕第二电机701轴向旋转,当第二电机701转动,手腕第一舵盘47转动并通过手腕拉杆48拉动手腕第二舵盘49转动,手腕第二舵盘49带动手腕第一电机70和手掌11俯仰运动。手掌11通过手掌连接结构12连接手腕第一电机70,手掌连接结构12一端固定安装在手腕第一电机70端面,手腕第一电机70带动手掌连接结构12绕手腕第一电机70轴线转动。手掌连接结构12另一端固定连接手掌11,当手腕第一电机70转动时,手掌连接结构12左右摇动并带动手掌11左右摇动。
46.手腕第一舵盘47和手腕第二舵盘49安装在手腕拉杆壳46上;手腕拉杆壳46一端设置为舵盘安装板,舵盘安装板垂直向手腕拉杆壳46另一端延伸出横滚电机安装板,手腕第一舵盘47和手腕第二舵盘49安装在舵盘安装板上并允许相对舵盘安装板自转。手腕拉杆48设置有两个,两个手腕拉杆48平行,两个手腕拉杆48两端分别通过拉杆卡扣安装在手腕第一舵盘47和手腕第二舵盘49上,手腕拉杆48通过手腕舵盘轴承50连接并相对手腕第一舵盘47和手腕第二舵盘49转动,手腕第一舵盘47、手腕第二舵盘49和两个手腕拉杆48构成手腕并联拉杆结构,手腕第二电机701通过手腕并联拉杆结构带动手掌11做俯仰运动。手腕并联拉杆结构、手腕第二电机701以及手腕拉杆壳46外侧安装前臂手腕外壳9,手掌11背向手腕第一电机70一端转动安装多个手指10。
47.横滚电机安装板背向舵盘安装板一侧安装前掌手掌横滚电机输出轴45,前掌手掌横滚电机输出轴45带动手腕拉杆壳46绕前掌手掌横滚电机输出轴45轴向旋转。手腕第二电机701端面平行于舵盘安装板和手腕第一舵盘47,手腕第一电机70轴线平行于舵盘安装板、手腕第二舵盘49和横滚电机安装板,手腕第一电机70和手腕第二电机701安装在手腕拉杆壳46上。
48.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
49.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。