1.本实用新型涉及机器人结构领域,具体地,涉及手指机构及机器人。
背景技术:
2.随着机器人的广泛普及,越来越多的机器人被应用到生产与生活中去,因此也对机器人的要求越来越高。在拟人机器人中,为了应对越来越高的要求,适应各种情况,对机器人的整体自由程度以及其稳定性也有了更高的要求。而手指机构是实现高自由度和稳定抓握的重要部件。
3.目前市面上的手指机构的整体结构灵活度不够且采用大量的舵机,本设计希望提供一种结构紧凑灵活,且无需安装太多舵机的手指机构。
4.专利文献cn109648591a的机器人手指装置包括基座、绕近关节轴铰接在基座上的第一指段和绕远关节轴铰接在第一指段上的第二指段,第二指段固定在与远关节轴铰接的第二指段连杆上,以初始状态下基座、第一指段和第二指段的排列方向为竖向,第一指段上设有沿与竖向交叉的方向导向移动设置的导向滑座,导向滑座铰接有第一连杆和变耦连杆,第一指段上铰接有抓取连杆,抓取连杆具有用于抓取物品的抓取端和与变耦连杆铰接的变耦端,变耦连杆位于抓取连杆背向机器人手指装置抓取方向的一侧,抓取连杆与第一指段的铰接点位于抓取连杆的两个端部之间。
5.专利文献cn111376287a属于机器人手指技术领域,涉及机器人及其手指。手掌骨架固定有固定指节,第一活动指节枢接于固定指节,第二活动指节枢接于第一活动指节。第一活动指节与固定指节之间、第二活动指节与第一活动指节之间分别形成转动副,通过第二柔性牵引件耦合两个转动副的转动运动,通过驱动器驱动第一柔性牵引件移动,驱动耦合后的一个自由度的手指,从而实现手指在整个握紧行程上的可控运动。
6.上述现有专利均未能解决手指机构的整体结构灵活度不够且采用大量舵机的问题。
技术实现要素:
7.针对现有技术中的缺陷,本实用新型的目的是提供一种手指机构及机器人。
8.根据本实用新型提供的一种手指机构,包括:小指指头、小指第二节外壳、小指第一节外壳、小指舵机、小指下部拉杆以及小指上部拉杆;
9.所述小指第一节外壳一端转动连接所述小指舵机,所述小指第一节外壳另一端转动连接所述小指第二节外壳一端,所述小指第二节外壳另一端转动连接所述小指指头;
10.所述小指第一节外壳内安装所述小指下部拉杆,所述小指第二节外壳内安装所述小指上部拉杆;
11.所述小指下部拉杆一端转动连接所述小指舵机,所述小指下部拉杆另一端转动连接所述小指第二节外壳;
12.所述小指上部拉杆一端转动连接所述小指第一节外壳,所述小指上部拉杆另一端
转动连接所述小指指头;
13.所述小指指头下侧设置防滑指纹。
14.以所述小指舵机朝向所述小指指头一端为前端,以所述小指指头设置所述防滑指纹一侧方向为下端。
15.优选地,所述小指舵机朝向所述小指下部拉杆一端中间设置凹槽;
16.所述小指下部拉杆安装在所述凹槽内前上端。
17.优选地,所述小指舵机两侧设置轴孔,所述轴孔内安装转轴。
18.优选地,所述小指第一节外壳包括:左半第一节外壳和右半第一节外壳;
19.所述左半第一节外壳和所述右半第一节外壳分别安装在所述小指舵机两侧并通过所述转轴相对所述小指舵机同轴转动。
20.优选地,所述左半第一节外壳和所述右半第一节外壳通过连接柱固定连接。
21.优选地,所述小指下部拉杆背向所述小指舵机一端安装在所述小指第二节外壳后下端。
22.优选地,所述小指上部拉杆连接所述小指第一节外壳前上端;
23.所述小指上部拉杆连接所述小指舵机后下端。
24.优选地,当所述小指舵机工作时,所述小指下部拉杆转动并拉动所述小指第二节外壳转动,所述小指第二节外壳带动所述小指上部拉杆转动,所述小指上部拉杆拉动所述小指指头转动。
25.优选地,一种机器人采用所述手指机构。
26.与现有技术相比,本实用新型具有如下的有益效果:
27.1、本设计通过上下部拉杆的错位连接方式带动手指自由弯曲,可以减小舵机使用数量,形成联动,实现抓握,确定了手指运动行程;
28.2、本设计通过多节外壳连接,可以仿人机械手指,集成度高,可以拼接在不同的抓持机构上。
附图说明
29.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
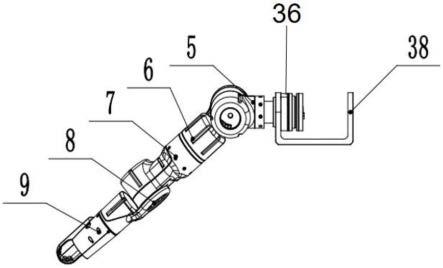
30.图1为手指机构整体结构示意图;
31.图2为手指机构内部结构示意图;
32.图中所示:
33.具体实施方式
34.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领
域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
35.实施例1
36.一种手指机构,可用于机器人,包括:小指指头86、小指第二节外壳87、小指第一节外壳88、小指舵机99、小指下部拉杆105以及小指上部拉杆106;小指第一节外壳88一端转动连接小指舵机99,小指第一节外壳88另一端转动连接小指第二节外壳87一端,小指第二节外壳87另一端转动连接小指指头86,小指第一节外壳88内安装小指下部拉杆105,小指第二节外壳87内安装小指上部拉杆106,小指下部拉杆105一端转动连接小指舵机99,小指下部拉杆105另一端转动连接小指第二节外壳87,小指上部拉杆106一端转动连接小指第一节外壳88,小指上部拉杆106另一端转动连接小指指头86,小指指头86外侧设置防滑指纹。当小指舵机99工作时,小指下部拉杆105转动并拉动小指第二节外壳87转动,小指第二节外壳87带动小指上部拉杆106转动,小指上部拉杆106拉动小指指头86转动。
37.小指下部拉杆105背向小指舵机99一端安装在小指第二节外壳87后下端,小指上部拉杆106连接小指第一节外壳88前上端,小指上部拉杆106连接小指舵机99后下端。小指舵机99朝向小指下部拉杆105一端中间设置凹槽,小指下部拉杆105安装在凹槽内前上端。小指舵机99两侧设置轴孔,轴孔内安装转轴。小指第一节外壳88包括:左半第一节外壳和右半第一节外壳;左半第一节外壳和右半第一节外壳分别安装在小指舵机99两侧并通过转轴相对小指舵机99同轴转动,左半第一节外壳和右半第一节外壳通过连接柱固定连接。
38.本实施例中手指机构可以通过小指舵机99适配在其他机器人上。
39.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
40.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。