1.本实用新型涉及机器人结构领域,具体地,涉及肩臂机构及机器人。
背景技术:
2.随着机器人的广泛普及,越来越多的机器人被应用到生产与生活中去,因此也对机器人的要求越来越高。在拟人机器人中,为了应对越来越高的要求,适应各种情况,对机器人的手臂灵活自由程度以及其稳定性也有了更高的要求。
3.专利文献cn207771826u提供一种仿生机器人手臂外壳,设置于仿生机器人手臂的相邻关节之间,包括积木式依次连接的复数个壳体,其中至少两个所述壳体之间具有相对旋转,所述相对旋转以其所涉的壳体之间的连接线为轴;一种仿生机器人手臂,包括依次连接的肩关节、大臂、肘关节、小臂与腕关节,所述大臂与所述小臂中至少一者为所述仿生机器人手臂外壳。
4.专利文献cn112476478a公开了一种面向人机协作仿生绳驱动四自由度手臂,其中肘关节的自由度为一,腕关节的自由度为三。所有关节的驱动都是通过绳索传动的方式实现的,其中肘关节是通过相切圆滚动机构实现,同时设计了动滑轮传动结构实现关节刚度和扭矩的放大,腕关节的三个自由度是通过三连杆并联机构配合万向节实现的;所有关节驱动电机都布置在肩部结构处,有效降低了手臂的运动惯量,关节之间的绳长变化是解耦的,便于控制。
5.上述现有专利机器人自由度仍具有一定局限性。
技术实现要素:
6.针对现有技术中的缺陷,本实用新型的目的是提供一种肩臂机构及机器人。
7.根据本实用新型提供的一种肩臂机构,包括:前臂肘部输出、手臂第一电机、手臂第二电机、手臂第三电机以及肩膀电机输出轴;
8.所述肩膀电机输出轴端面安装所述手臂第二电机并带动所述手臂第二电机沿所述肩膀电机输出轴轴向旋转;
9.所述手臂第二电机周侧安装所述肩膀电机输出轴和所述手臂第三电机一端,所述肩膀电机输出轴通过所述手臂第二电机相对所述手臂第三电机转动;
10.所述手臂第三电机另一端端面安装在所述前臂肘部输出周侧并带动所述前臂肘部输出沿所述手臂第三电机轴向旋转;
11.所述前臂肘部输出周侧安装所述手臂第一电机一端,所述手臂第一电机通过所述前臂肘部输出相对所述手臂第三电机转动。
12.优选地,所述手臂第一电机另一端端面安装前掌手掌横滚电机输出轴并带动所述前掌手掌横滚电机输出轴沿所述手臂第一电机轴向转动。
13.优选地,所述前掌手掌横滚电机输出轴安装前臂手腕外壳;
14.所述前臂手腕外壳连接所述手臂第一电机。
15.优选地,所述手臂第三电机朝向所述前臂肘部输出一端固定连接肘部横滚电机输出轴;
16.所述肘部横滚电机输出轴连接所述前臂肘部输出。
17.优选地,所述肘部横滚电机输出轴外侧安装肘部旋转外壳;
18.所述肘部旋转外壳一端连接所述手臂第三电机,所述肘部旋转外壳另一端连接所述前臂肘部输出。
19.优选地,所述手臂第三电机背向所述肘部旋转外壳一端安装肩膀电机转角;
20.所述肩膀电机转角通过所述手臂第三电机相对所述肘部旋转外壳旋转。
21.优选地,所述肩膀电机转角背向所述手臂第三电机一端连接所述手臂第二电机周侧。
22.优选地,所述手臂第二电机周侧和所述肩膀电机输出轴之间通过肩部电机壳转角连接;
23.所述肩部电机壳转角通过所述手臂第二电机相对所述肩膀电机转角同轴转动。
24.优选地,所述肩膀电机输出轴安装在肩膀底座上。
25.优选地,一种机器人采用所述肩臂机构。
26.优选地,所述前臂肘部输出、所述手臂第一电机、所述手臂第二电机以及所述手臂第三电机传动方式均为谐波传动。
27.与现有技术相比,本实用新型具有如下的有益效果:
28.1、本装置通过多个电机实现机器人肩臂机构的多自由度转动;
29.2、本装置结构紧凑,通过多个连接结构提高整体刚度,在运动过程中抖动小,位置精度高;
30.3、本装置通过多自由度转动适用范围广,可拆卸安装于多种机器人,互换性高。
附图说明
31.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
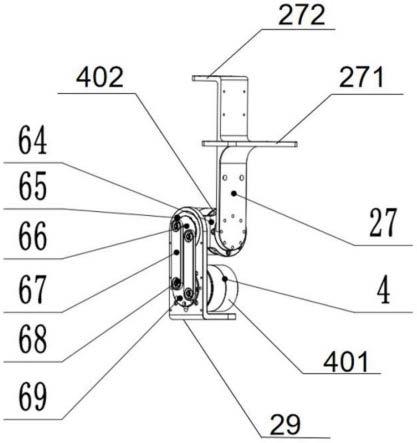
32.图1为肩臂机构的整体结构示意图;
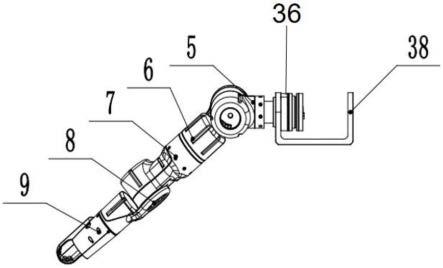
33.图2为肩臂机构电机传动部件位置关系示意图。
34.图中所示:
35.具体实施方式
36.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
37.实施例1
38.如图1和图2所示,一种肩臂机构,可用于机器人,包括:前臂肘部输出8、手臂第一电机22、手臂第二电机30、手臂第三电机31以及肩膀电机输出轴36;肩膀电机输出轴36端面安装手臂第二电机30并带动手臂第二电机30沿肩膀电机输出轴36轴向旋转,手臂第二电机30周侧安装肩膀电机输出轴36和手臂第三电机31一端,肩膀电机输出轴36通过手臂第二电机30相对手臂第三电机31转动,手臂第三电机31另一端端面安装在前臂肘部输出8周侧并带动前臂肘部输出8沿手臂第三电机31轴向旋转,前臂肘部输出8周侧安装手臂第一电机22一端,手臂第一电机22通过前臂肘部输出8相对手臂第三电机31转动。肩膀电机输出轴36安装在肩膀底座38上。
39.手臂第三电机31朝向前臂肘部输出8一端固定连接肘部横滚电机输出轴32,肘部横滚电机输出轴32连接前臂肘部输出8。肘部横滚电机输出轴32外侧安装肘部旋转外壳7,肘部旋转外壳7一端连接手臂第三电机31,肘部旋转外壳7另一端连接前臂肘部输出8。手臂第三电机31背向肘部旋转外壳7一端安装肩膀电机转角6,肩膀电机转角6通过手臂第三电机31相对肘部旋转外壳7旋转。肩膀电机转角6背向手臂第三电机31一端连接手臂第二电机30周侧。手臂第二电机30周侧和肩膀电机输出轴36之间通过肩部电机壳转角5连接,肩部电机壳转角5通过手臂第二电机30相对肩膀电机转角6同轴转动。
40.手臂第一电机22另一端端面安装前掌手掌横滚电机输出轴45并带动前掌手掌横滚电机输出轴45沿手臂第一电机22轴向转动。前掌手掌横滚电机输出轴45安装前臂手腕外壳9,前臂手腕外壳9连接手臂第一电机2。
41.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
42.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。