1.本发明涉及车辆机械领域,特别是一种基于路面等级的救援车辆主动悬架控制方法及系统。
背景技术:
2.随着车辆的快速普及,人们对车辆的乘坐舒适性要求也越来越高,因此现有研究中对车辆悬架的控制主要考虑车辆的乘坐舒适性。在传统的悬架控制研究中,一方面,由于汽车在不同等级路面行驶时,因对路面的异常状况,如异物、凹坑及凸起、减速带等形状及大小无法进行连续和准确的判断,难以对悬架系统进行预先控制,输出最优阻尼力来改善悬架系统的性能。另一方面,目前较为智能的主动式底盘在进行工作时,需要将路面干扰先作用于行驶过程中的车辆前轮后,才能采集和分析路面信号,并通过预瞄控制实现对后轮悬架的主动控制调节,使得车辆整体未能及时对行车的安全性及舒适性进行合理决策及最优控制。
3.而且现有对车辆悬架控制的研究大多只采用一种控制策略来实现车辆在所有路面行驶时主动悬架的控制,但面对复杂多变且不平度较高的路面无法实现良好的控制效果。部分研究虽考虑了路面不平度对悬架控制的影响问题,但未从悬架作动器的角度来研究抑制复杂多变的路面干扰力,导致对车辆行驶平顺性和稳定性提高有限。
4.在面对艰巨的灾后救援工作,救援车辆在考虑舒适性的同时还需要具有更好的越野行驶能力,即应对不同等级路面的快速适应和调节能力,因此建立应急救援车在不同等级路面的主动悬架控制策略具有重要的实际意义。
技术实现要素:
5.本发明目的在于提供一种基于路面等级的救援车辆主动悬架控制方法及系统,能根据路面等级切换控制方法,总体改善车辆的行驶平顺性和稳定性。
6.为实现上述目的,采用了以下技术方案:
7.一种基于路面等级的救援车辆主动悬架控制方法,具体包括以下步骤:
8.s1,车辆在行驶过程中,不断进行路面识别,将所述路面等级分为低等级路面和高等级路面;r
l
=1表示识别路面为所述低等级路面;rh=1表示识别路面为所述高等级路面;
9.s2,判断路面等级,若r
l
=1则执行步骤s3后直接执行步骤s5;若rh=1则执行步骤s3和s4后,再执行步骤s5;
10.s3,计算天棚阻尼力;
11.在主动悬架的簧载质量上加装有第一加速度传感器,在主动悬架的非簧载质量上加装有第二加速度传感器,所述第一加速度传感器和所述第二加速度传感器采集所述簧载质量和所述非簧载质量的加速度,将采集到的加速度信号输送到车载ecu中,所述车载ecu控制器获取所述簧载质量和所述非簧载质量的速度,根据天棚阻尼力模型使用簧载质量和所述非簧载质量的速度得到天棚阻尼力;
12.s4,计算液压缸输出力fg;
13.使用簧载质量受力模型、天棚阻尼力与液压缸输出力的传递函数和外力和悬架动位移之间的二阶关系函数,得到液压缸输出力fg;
14.s5,得到作动器控制力u,用于对主动悬架进行控制;
15.若r
l
=1则将天棚阻尼力f
sky
作为作动器控制力u,即:u=f
sky
;
16.若rh=1则将液压缸输出力fg作为所述作动器控制力u,即:u=fg;
17.根据作动器控制力使用作动器对主动悬架进行控制。
18.优选的,所述步骤s3中天棚阻尼力模型为:
[0019][0020]
其中,f
sky
为天棚阻尼力,c
sky
为天棚阻尼系数,为车身速度;
[0021]
天棚阻尼系数的确定公式为:
[0022][0023]
其中,c
max
为最大天棚阻尼系数;c
min
为最小天棚阻尼系数,为车身速度,为非簧载质量速度。
[0024]
优选的,所述步骤s4中使用簧载质量受力模型、天棚阻尼力与液压缸输出力的传递函数和外力和悬架动位移之间的二阶关系函数,得到液压缸输出力fg,具体为:
[0025]
簧载质量受力模型为:
[0026]fg
=f
sky-f
ext
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0027]
其中,fg为液压缸输出力,f
sky
为所述天棚阻尼力,f
ext
为外力;
[0028]
所述天棚阻尼力f
sky
与液压缸输出力fg的传递函数为:
[0029][0030]
其中,g
pid
(s)为pid控制传递函数,pid控制传递函数的参数值的大小根据实际车辆确定;ka为伺服阀放大板增益;k
asv
为伺服阀总增益;kf为力传感器增益;kq为伺服阀流量增益;k
ce
为流量-压力系数;a
p
作动器有效工作面积;s为拉普拉斯算子;固有频率ks为悬架弹簧刚度;mb为簧载质量;ωr为液压和负载弹簧串联后刚度与阻尼系数之比kh为液压弹簧刚度,βe为液压油弹性模量;v
t
为液压缸等效容积;ω0为液压和负载弹簧并联后的固有频率,ζ0为阻尼比
[0031]
外力f
ext
又被称为干扰力,外力f
ext
和悬架动位移z
sdd
之间的二阶关系函数为:
[0032][0033]
其中,md为抗干扰惯性系数;dd为抗干扰阻尼系数;kd为抗干扰刚度系数;为主动悬架加速度,为主动悬架速度,z
sdd
为主动悬架动位移,所述悬架动位移z
sdd
=z
b-zw,其中,zb为车身位移,zw为非簧载质量位移;
[0034]
根据簧载质量受力模型、外力f
ext
和悬架动位移z
sdd
之间的二阶关系函数和天棚阻尼力f
sky
与液压缸输出力fg的传递函数,即式(5)-(7),能获得液压缸输出力fg。
[0035]
优选的,所述步骤s1中将所述路面等级分为低等级路面和高等级路面具体为:
[0036][0037][0038]
其中,g(n0)为路面不平度系数;r
l
=1表示识别路面为所述低等级路面;rh=1表示识别路面为所述高等级路面;路面等级识别模块为现有技术,通常采用实时图像识别或者定位方式来获取路面不平度系数。
[0039]
优选的,还包括步骤s6,所述步骤s6具体为:
[0040]
s6,将作动器控制力代入主动悬架动力学模型中,对车辆平顺性进行评估;
[0041]
建立主动悬架动力学模型为:
[0042][0043][0044]
其中,mb为簧载质量;mw为非簧载质量;ks为悬架弹簧刚度;cs为阻尼器的阻尼;k
t
为轮胎刚度;zb为车身位移;为车身速度;为车身加速度;zw非簧载质量位移;为非簧载质量速度;为非簧载质量加速度;zr为随机路面不平度的幅度;u为作动器控制力。
[0045]
所述随机路面不平度的幅度公式为:
[0046][0047]
其中,g(n0)为步骤1中用于路面分类的具体路面不平度系数值;v车辆行驶速度;w(t)数学期望为零的高斯白噪声信号;f0为滤波器的下截止频率,若f0=0,那么滤波器为积分环节,路面输入为积分白噪声,取f0=0.01,以此来接近实际的路面情况,为随机路面不平度的幅度的导数值;
[0048]
将所述作动器控制力u代入主动悬架动力学模型中,计算所述主动悬架动位移z
b-zw来对车辆平顺性进行评估,主动悬架动位移越趋近于0则车辆平顺性越好。
[0049]
本发明还公开了一种基于路面等级的救援车辆主动悬架控制的系统,包括:路面等级识别模块、天棚控制模块、抗干扰控制模块和作动器模块;
[0050]
所述路面等级识别模块,用于根据不平度系数,将车辆行驶路面等级识别结果划分为低等级路面和高等级路面;当路面等级识别结果为低等级路面时,调用天棚控制模块,当路面等级识别结果为高等级路面时,调用天棚控制模块和抗干扰控制模块、;
[0051]
所述天棚控制模块,用于天棚阻尼力的计算,具体为:根据簧载质量和非簧载质量的速度使用天棚阻尼力模型获得天棚阻尼力,当路面等级识别结果为低等级路面时,将天棚阻尼力作为作动器控制力u发送给作动器模块;当路面等级识别结果为高等级路面时,将天棚阻尼力发送给抗干扰控制模块;
[0052]
所述抗干扰控制模块,实现力和位移匹配的动态关系,对所述天棚阻尼力进行在高等级路面干扰下的跟踪,具体为:从天棚控制模块接收天棚阻尼力后,根据簧载质量受力模型、天棚阻尼力f
sky
与液压缸输出力fg的传递函数、以及外力f
ext
和悬架动位移z
sdd
之间的二阶关系函数,最终得到液压缸输出力,液压缸输出力作为作动器控制力u发送到作动器模块;
[0053]
作动器模块,根据作动器控制力对主动悬架进行控制。
[0054]
优选的,还包括主动悬架动力模块,所述主动悬架动力模块具体为:
[0055]
主动悬架动力模块,用于执行主动悬架动力学模型;从作动器模块接收作动器控制力u,并使用主动悬架动力学模型对车辆平顺性进行评估。
[0056]
与现有技术相比,本发明具有以下有益效果:
[0057]
1、本发明针对路面等级的不平度大小将路面分为低等级路面和高等级路面,不同路面等级采用不同的控制方法,增强了主动悬架系统适应变化复杂路面的能力。
[0058]
2、本发明研究从悬架作动器的角度来抑制随机路面干扰力,通过建立路面干扰力和悬架位移的动态匹配关系,有效削减了来自路面干扰力对车辆主动悬架控制的影响,提升了车辆行驶平顺性和稳定性。
[0059]
3、本发明采用国际通用的路面等级划分进行悬架主动控制,系统结构简单可靠。
附图说明
[0060]
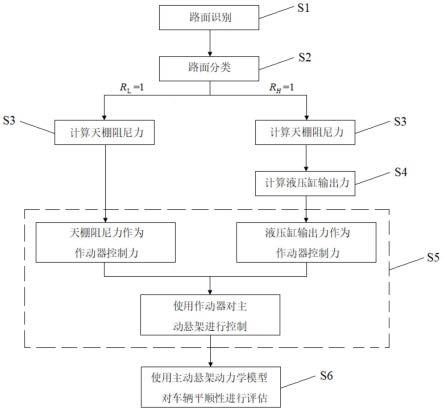
图1为本发明基于路面等级的车辆主动悬架控制方法的流程图;
[0061]
图2为本发明天棚控制模型图;
[0062]
图3为本发明抗干扰控制模块控制原理简图;
[0063]
图4为本发明单个车轮的主动悬架模型图;
[0064]
图5为本发明基于路面等级的车辆主动悬架控制系统的模块示意图。
具体实施方式
[0065]
本发明的目的是提供一种基于路面等级的车辆主动悬架阻抗控制系统及方法,能改善车辆在不同路面上的行驶平顺性和稳定性。
[0066]
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
[0067]
一种基于路面等级的救援车辆主动悬架控制方法,其原理为根据主动悬架模型建立天棚模型,根据天棚模型的天棚阻尼力的计算公式计算天棚阻尼力,然后再利用该力抵消来自车身振动所产生的力,实现车身的控制;如图1所示,方法具体包括:
[0068]
s1,车辆在行驶过程中,不断进行路面识别,将路面等级分为低等级路面和高等级路面,低等级路面不平度较低、变化缓慢,高等级路面不平度较高、变化剧烈。
[0069]
路面等级识别模块将路面识别结果划分为低等级路面和高等级路面,具体公式为:
[0070][0071][0072]
其中,g(n0)为路面不平度系数;r
l
=1表示识别路面为低等级路面;rh=1表示识别路面为高等级路面。路面等级识别模块为现有技术,通常采用实时图像识别或者定位方式来获取路面不平度系数。
[0073]
s2,判断路面等级,若r
l
=1则执行步骤s3后直接执行步骤s5;若rh=1则执行步骤s3和s4后,再执行步骤s5。
[0074]
当路面为低等级路面时,路面不平度较低、变化缓慢,此时可将天棚阻尼力直接作为作动器控制力对主动悬架进行控制。
[0075]
当路面为高等级路面时,路面不平度较高、变化剧烈,若此时将天棚阻尼力直接作为作动器控制力对主动悬架进行控制,则无法抑制随机路面干扰力,从而使得实际作动器控制力无法准确跟随天棚阻尼力,使得作动器控制力输入到主动悬架动力学模型后得到的悬架动位移产生误差,进一步影响车辆的行驶平顺性。因此还需要从作动器的角度来抑制随机路面干扰力,通过建立路面干扰力和悬架位移的动态匹配关系,削减来自路面干扰力对车辆主动悬架控制的影响,提升车辆行驶平顺性和稳定性。
[0076]
s3,计算天棚阻尼力。
[0077]
如图2所示,本实施例在现有常用主动悬架模块基础上,在簧载质量加装有第一加速度传感器,非簧载质量加装有第二加速度传感器。第一加速度传感器和第二加速度传感器采集簧载质量和非簧载质量的加速度,将采集到的加速度信号输送到车载ecu(汽车引擎控制器控制器,engine control unit)中,车载ecu通过信号处理来获取簧载质量和非簧载质量的速度,为简化模型,本发明中簧载质量的位移、速度和加速度相当于车身的位移、速度和加速度。本发明只考虑单个车轮的稳定性控制,因此所涉及到的位移、速度和加速度如果没有特别说明都是指垂直方向。根据天棚阻尼力模型使用簧载质量速度和非簧载质量速度得到天棚阻尼力。
[0078]
天棚阻尼力模型为:
[0079][0080]
其中,f
sky
为天棚阻尼力,c
sky
为天棚阻尼系数,为车身速度;
[0081]
天棚阻尼系数的确定公式为:
[0082]
[0083]
其中,c
max
为最大天棚阻尼系数;c
min
为最小天棚阻尼系数,为车身速度,为非簧载质量速度。
[0084]
s4,计算液压缸输出力fg。
[0085]
根据步骤s4的天棚阻尼力,使用簧载质量受力模型、天棚阻尼力与液压缸输出力的传递函数和外力和悬架动位移之间的二阶关系函数,得到液压缸输出力fg。
[0086]
对簧载质量进行受力分析可知,簧载质量受力模型为:
[0087]fg
=f
sky-f
ext
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0088]
其中,fg为液压缸输出力,f
sky
为天棚阻尼力,f
ext
为外力;
[0089]
抗干扰控制模块控制原理简图如图3所示。
[0090]
根据抗干扰控制模块控制原理可建立天棚阻尼力f
sky
与液压缸输出力fg的传递函数为:
[0091][0092]
其中,g
pid
(s)为pid控制传递函数,pid控制传递函数的参数值的大小根据实际车辆确定;ka为伺服阀放大板增益;k
asv
为伺服阀总增益;kf为力传感器增益;kq为伺服阀流量增益;k
ce
为流量-压力系数;a
p
作动器有效工作面积;s为拉普拉斯算子;固有频率ks为悬架弹簧刚度;mb为簧载质量;ωr为液压和负载弹簧串联后刚度与阻尼系数之比kh为液压弹簧刚度,βe为液压油弹性模量;v
t
为液压缸等效容积;ω0为液压和负载弹簧并联后的固有频率,ζ0为阻尼比
[0093]
外力f
ext
又被称为干扰力,外力f
ext
和悬架动位移z
sdd
之间的二阶关系函数为:
[0094][0095]
其中,md为抗干扰惯性系数;dd为抗干扰阻尼系数;kd为抗干扰刚度系数;为主动悬架加速度,为主动悬架速度,z
sdd
为主动悬架动位移,悬架动位移z
sdd
=z
b-zw,其中,zb为车身位移,zw为非簧载质量位移;悬架动位移是通过车载ecu控制器对簧载质量和非簧载质量的加速度信号进行处理,将获得的簧载质量和非簧载质量的位移信号作差得到;
[0096]
根据簧载质量受力模型、外力f
ext
和悬架动位移z
sdd
之间的二阶关系函数和天棚阻尼力f
sky
与液压缸输出力fg的传递函数,即式(5)-(7),可获得液压缸输出力fg。
[0097]
s5,得到作动器控制力u,用于对主动悬架进行控制。
[0098]
若r
l
=1则将天棚阻尼力f
sky
作为作动器控制力u,即:u=f
sky
;
[0099]
若rh=1则将液压缸输出力fg作为作动器控制力u,即:u=fg。
[0100]
根据作动器控制力使用作动器对主动悬架进行控制。
[0101]
s6,将作动器控制力代入主动悬架动力学模型中,对车辆平顺性进行评估。
[0102]
从单个车轮来看,主动悬架模型如图4所示,建立主动悬架动力学模型为:
[0103][0104][0105]
其中,mb为簧载质量;mw为非簧载质量;ks为悬架弹簧刚度;cs为阻尼器的阻尼;k
t
为轮胎刚度;zb为车身位移;为车身速度;为车身加速度;zw非簧载质量位移;为非簧载质量速度;为非簧载质量加速度;zr为随机路面不平度的幅度;u为作动器控制力。
[0106]
随机路面不平度的幅度公式为:
[0107][0108]
其中,g(n0)为步骤1中用于路面分类的具体路面不平度系数值;v车辆行驶速度,此速度不是指垂直方向速度;w(t)数学期望为零的高斯白噪声信号;f0为滤波器的下截止频率,若f0=0,那么滤波器为积分环节,路面输入为积分白噪声,取f0=0.01,以此来接近实际的路面情况,为随机路面不平度的幅度的导数值。
[0109]
将作动器控制力u代入主动悬架动力学模型中,计算主动悬架动位移z
b-zw来对车辆平顺性进行评估,主动悬架动位移越趋近于0则车辆平顺性越好。
[0110]
进一步,本发明还公开了一种基于路面等级的车辆主动悬架控制系统,如图5所示,系统包括:路面等级识别模块1、天棚控制模块2、抗干扰控制模块3和作动器模块4。
[0111]
路面等级识别模块1用于根据不平度系数,将车辆行驶路面等级识别结果划分为低等级路面和高等级路面。当路面等级识别结果为低等级路面时,调用天棚控制模块2,当路面等级识别结果为高等级路面时,调用天棚控制模块2和抗干扰控制模块3。
[0112]
天棚控制模块2,用于天棚阻尼力的计算,具体为:根据簧载质量和非簧载质量的速度使用天棚阻尼力模型获得天棚阻尼力,当路面等级识别结果为低等级路面时,将天棚阻尼力作为作动器控制力u发送到作动器模块4;当路面等级识别结果为高等级路面时,将天棚阻尼力发送给抗干扰控制模块3。
[0113]
抗干扰控制模块3,实现力和位移匹配的动态关系,对天棚阻尼力进行在高等级路面干扰下的跟踪,具体为:从天棚控制模块2接收天棚阻尼力后,根据簧载质量受力模型、天棚阻尼力f
sky
与液压缸输出力fg的传递函数、以及外力f
ext
和悬架动位移z
sdd
之间的二阶关系函数,最终得到液压缸输出力,液压缸输出力作为作动器控制力u发送到作动器模块4。
[0114]
作动器模块4,根据作动器控制力对主动悬架进行控制。
[0115]
进一步,系统还包括主动悬架动力模块5,用于执行主动悬架动力学模型;从作动器模块4接收作动器控制力u,使用主动悬架动力学模型对车辆平顺性进行评估;
[0116]
下面以一个具体实施例进行详细说明:首先识别路面等级,若g(n0)值大于等于8且小于128,此时根据路面等级划分单元判断并得出该路面为低等级路面,即r
l
=1。系统将执行天棚控制模块,根据天棚阻尼力模型计算天棚阻尼力,将天棚阻尼力直接作为作动器
的执行力来控制主动悬架,以此改善车辆行驶平顺性和稳定性。若g(n0)值大于等于128且小于等于32768,此时路面等级划分单元判断并得出该路面为高等级路面,即rh=1。系统将执行天棚控制模块和抗干扰控制模块,根据天棚阻尼力模型计算天棚阻尼力,将天棚阻尼力输入到抗干扰控制模块,将抗干扰控制模块计算出的液压缸输出力作为作动器的执行力来控制主动悬架,以此改善车辆行驶平顺性和稳定性。进一步,建立主动悬架动力学模型,接收作动器控制力使用主动悬架动力学模型对车辆平顺性进行评估。当g(n0)值大于32768时,这样的路面车辆是无法正常通行的,因此不在本发明的考虑范围以内。
[0117]
最后应说明的是:以上所述的各实施例仅用于说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。