1.本发明涉及自主行驶系统。
背景技术:
2.作为推定无人车辆的状态(位置信息等)的技术,有slam(simultaneous localization and mapping:同时定位与地图创建)。slam是同时进行移动体的自身位置推定和环境地图制作的技术,移动体能够在未知的环境下制作环境地图。一边使用构建的地图信息避开障碍物等一边执行特定的任务。
3.作为推定自主行驶车的自身位置的技术,已知使用路面图像的技术(例如,参照专利文献1)。该技术是,在车体的下表面设置拍摄路面的照相机,从预先拍摄的图像(地图图像)和当前时点的路面图像(实际的图像)各自检测特征,对它们进行比较来推定自身位置。
4.现有技术文献
5.专利文献
6.专利文献1:美国专利第8725413号说明书
技术实现要素:
7.发明要解决的问题
8.然而,在制作地图时,在自主行驶车搭载照相机、惯性测定设备(imu:inertial measurement unit:惯性测量单元)以及卫星定位设备(gps:global positioning system:全球定位系统),使自主行驶车行驶并按设定的距离间隔拍摄图像,从惯性测定设备(imu)、卫星定位设备(gps)、照相机的计测信息算出与拍摄到的图像相关联的自主行驶车的位置坐标和姿势信息的情况下,地图制作精度会变低。详细地说,惯性测定设备(imu)、卫星定位设备(gps)的定位精度低,与制作地图时拍摄的图像相关联的自主行驶车的位置坐标和姿势信息的精度低。其结果是,自主行驶车的位置坐标和姿势信息的推定精度低,因此自动行驶精度变低。
9.用于解决问题的方案
10.用于解决上述问题的自主行驶系统的主旨在于,具备:路面图像取得装置,其设置在自主行驶车的车体的下表面,取得上述车体的下方的路面的图像;存储部,其搭载于上述自主行驶车,存储被关联了上述自主行驶车的位置坐标和姿势信息的上述路面的地图图像;推定部,其搭载于上述自主行驶车,通过对从由上述路面图像取得装置取得的上述路面的图像提取出的特征和从上述地图图像提取出的特征进行比较来推定上述自主行驶车的位置坐标和姿势信息;地上侧卫星信号接收天线,其设置在上述自主行驶车行驶的地上侧,从人造卫星接收电波;无线通信机,其用于将上述地上侧卫星信号接收天线的测量信息通过无线发送到上述自主行驶车;车辆侧卫星信号接收天线,其搭载于上述自主行驶车,从人造卫星接收电波;以及地图制作部,其搭载于上述自主行驶车,在室外制作地图时,基于上述地上侧卫星信号接收天线的测量信息和上述车辆侧卫星信号接收天线的测量信息,根据
由上述路面图像取得装置取得的上述路面的图像来制作被关联了上述自主行驶车的位置坐标和姿势信息的上述路面的地图图像。
11.据此,在自主行驶车搭载有车辆侧卫星信号接收天线。另外,设置在地上侧的地上侧卫星信号接收天线的测量信息通过无线被发送到自主行驶车。并且,在搭载于自主行驶车的地图制作部中,在室外制作地图时,基于地上侧卫星信号接收天线的测量信息和车辆侧卫星信号接收天线的测量信息,根据由路面图像取得装置取得的路面的图像来制作被关联了自主行驶车的位置坐标和姿势信息的路面的地图图像。
12.其结果是,能够提高与取得的图像相关联的自主行驶车的位置坐标和姿势信息的精度。
13.另外,在自主行驶系统中,可以是,上述地图制作部检索在时间上与由上述路面图像取得装置取得了上述路面的图像的时刻最接近的上述地上侧卫星信号接收天线的测量信息和上述车辆侧卫星信号接收天线的测量信息,制作被关联了上述自主行驶车的位置坐标和姿势信息的上述路面的地图图像。
14.另外,在自主行驶系统中,可以是,在上述自主行驶车中将上述路面图像取得装置和上述车辆侧卫星信号接收天线配置在同一铅垂轴上。
15.另外,在自主行驶系统中,可以是,具有2个上述车辆侧卫星信号接收天线。
16.另外,在自主行驶系统中,可以是,还具备:测量设备,其设置于上述地上侧,对上述自主行驶车的位置坐标和姿势信息进行测量;以及测量设备用无线通信机,其用于将上述测量设备的测量信息通过无线发送到上述自主行驶车,上述地图制作部在室内制作地图时,基于上述测量设备的测量信息,根据由上述路面图像取得装置取得的上述路面的图像来制作被关联了上述自主行驶车的位置坐标和姿势信息的上述路面的地图图像。
17.另外,在自主行驶系统中,可以是,在上述自主行驶车中将使上述测量设备的光波反射的反射构件、上述路面图像取得装置以及上述车辆侧卫星信号接收天线配置在同一铅垂轴上。
18.发明效果
19.根据本发明,能够提高与取得的图像相关联的自主行驶车的位置坐标和姿势信息的精度。
附图说明
20.图1是自主行驶系统的整体构成图。
21.图2是图1的e部放大图。
22.图3是自主行驶系统的概略俯视图。
23.图4是示出自主行驶系统的电构成的框图。
24.图5是示出图像的一个例子的图。
25.图6是用于说明室外的地图制作处理的流程图。
26.图7是用于说明室内的地图制作处理的流程图。
27.图8的(a)是用于说明由照相机取得数据的时序图,图8的(b)是用于说明由地上侧gnss天线取得数据的时序图,图8的(c)是用于说明由车辆侧gnss天线取得数据的时序图,图8的(d)是用于说明由全站仪取得数据的时序图,图8的(e)是用于说明室外行驶时的数据
的关联的时序图,图8的(f)是用于说明室内行驶时的数据的关联的时序图。
28.图9是别的例子的自主行驶系统的整体构成图。
29.附图标记说明
30.10
…
自主行驶系统;20
…
自主行驶车;21
…
车体;22
…
下表面;30
…
照相机;51
…
推定部;60
…
存储部;61
…
地图图像;70
…
地图制作部;87
…
车辆侧gnss天线;88
…
车辆侧gnss天线;90
…
反射构件;91
…
无线通信机;92
…
无线通信机;100
…
地上侧gnss天线;102
…
无线通信机;110
…
全站仪;111
…
无线通信机;axv
…
同一铅垂轴;f1~f5
…
特征;s1~s8
…
人造卫星;sr
…
路面。
具体实施方式
31.以下,根据附图来说明将本发明具体化的一实施方式。
32.如图1所示,自主行驶系统10具备自主行驶车20。自主行驶车20是四轮车辆,具备:车体21;驱动轮82,其配置在车体21的下部;以及操舵轮85,其配置在车体21的下部。
33.如图1、图2所示,自主行驶车20具备照相机30。照相机30设置在自主行驶车20的车体21的下表面22的中央部,能够拍摄车体21的下方的路面sr。通过作为路面图像取得装置的照相机30,能够以固定周期取得路面sr的图像。图5示出由照相机30取得的图像p1的一个例子。图像p1呈圆形。
34.如图2所示,自主行驶车20具备照明用的光源31。光源31设置在车体21的下表面22。光源31例如由发光二极管(led)构成。光源31用于对路面sr中的照相机30的拍摄区域照射光。光源31与照相机30的拍摄定时同步地点亮。
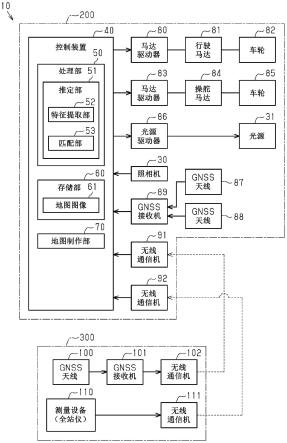
35.如图4所示,自主行驶系统10具有:移动体侧设备(车辆侧设备)200,其搭载于自主行驶车20;以及地上侧设备(基准侧设备)300,其设置在自主行驶车20行驶的地上侧。
36.移动体侧设备(车辆侧设备)200包含控制装置40。控制装置40包含处理部50、存储部60以及地图制作部70。处理部50具有推定部51,推定部51具备特征提取部52和匹配部53。移动体侧设备(车辆侧设备)200包含马达驱动器80、行驶马达81、马达驱动器83、操舵马达84、光源驱动器86、作为车辆侧卫星信号接收天线的车辆侧gnss(global navigation satellite system:全球导航卫星系统)天线87、88、gnss接收机89、无线通信机91、92。
37.地上侧设备(基准侧设备)300包含作为地上侧卫星信号接收天线的地上侧gnss天线100、gnss接收机101、无线通信机102、作为测量设备的全站仪110、无线通信机111。
38.在移动体侧设备(车辆侧设备)200的无线通信机91与地上侧设备(基准侧设备)300的无线通信机102之间能进行无线通信。另外,在移动体侧设备(车辆侧设备)200的无线通信机92与地上侧设备(基准侧设备)300的无线通信机111之间能进行无线通信。
39.如图4所示,控制装置40连接着照相机30。控制装置40能够经由马达驱动器80控制行驶马达81而对驱动轮82进行驱动。控制装置40能够经由马达驱动器83控制操舵马达84而驱动操舵轮85。控制装置40能够经由光源驱动器86控制光源31。
40.在存储部60中存储有用于控制自主行驶车20的各种程序。控制装置40可以具备执行各种处理中的至少一部分处理的专用硬件,例如特定用途集成电路:asic。控制装置40能构成为按照计算机程序进行动作的1个以上的处理器、asic等1个以上的专用硬件电路、或者包含它们的组合的电路。处理器包含cpu、以及ram和rom等存储器。存储器存储有构成为
使cpu执行处理的程序代码或指令。存储器即计算机可读介质包含通用或专用的计算机能够访问的任何介质。
41.控制装置40按照存储于存储部60的程序来控制行驶马达81和操舵马达84,从而使自主行驶车20进行动作。本实施方式的自主行驶车20是无需搭乘者进行操作而通过控制装置40的控制自动地进行行驶、操舵的动作的车辆。
42.在存储部60中存储有路面的地图图像61、即预先对路面sr进行拍摄而得到的地图图像61。地图图像61是被关联了自主行驶车20的位置坐标和姿势信息的路面的图像。
43.推定部51能够通过对从例如图5所示的那样由照相机30拍摄(取得)的路面sr的图像提取出的特征(点群)f1~f5和从存储部60的地图图像61提取出的特征进行比较来推定自主行驶车20的位置坐标和姿势信息。
44.详细地说,在特征提取部52中,如图5所示,从作为当前时点的路面图像(实际的图像)的图像p1检测特征点,并且检测关于该特征点的特征量,即表示相对于特征点的某个像素的、周围的像素中的亮度的大小的程度的特征量。同样地,在特征提取部52中,从预先拍摄的地图图像检测特征点,并且检测关于该特征点的特征量,即表示相对于特征点的某个像素的、周围的像素中的亮度的大小的程度的特征量。然后,在匹配部53中,通过对当前时点的路面图像(实际的图像)中的各特征点的特征量和预先拍摄的地图图像中的各特征点的特征量进行比较来推定自主行驶车20的位置坐标和姿势信息。
45.在向存储部60预先存储地图图像61的情况下,存储路面的图案的位置坐标和姿势信息作为环境地图。环境地图通过利用slam(simultaneous localization and mapping:同时定位与地图构建)进行地图构建来制作。slam是同时进行移动体的自身位置推定和环境地图制作的技术,移动体能够在未知的环境下制作环境地图。使用构建的地图信息执行特定的任务。更详细地说,自主行驶车20的位置坐标如图3所示是示出车体21的一点的坐标,例如是车体21的水平方向的中央的坐标。并且,会通过对由照相机30取得的路面图像和事先取得的地图图像进行比较来推定自主行驶车20的位置坐标和姿势信息。
46.控制装置40通过一边推定地图上的自主行驶车20的位置坐标和姿势信息一边控制行驶马达81和操舵马达84,能使自主行驶车20移动到希望的位置。
47.如图1、图3所示,作为卫星定位设备的地上侧gnss天线100设置在自主行驶车20行驶的地上侧。地上侧gnss天线100是已知点。地上侧gnss天线100能够从人造卫星s1~s8接收电波。如图4所示,地上侧gnss天线100在地上侧与gnss接收机101连接。gnss接收机101在地上侧与无线通信机102连接。
48.如图4所示,在自主行驶车20中无线通信机91与控制装置40连接。通过在地上侧的无线通信机102与车辆侧的无线通信机91之间进行无线通信,能够将地上侧gnss天线100的测量信息发送到自主行驶车20的控制装置40。
49.如图1、图3所示,在自主行驶车20搭载有车辆侧gnss天线87、88。车辆侧gnss天线87、88能够从人造卫星s1~s8接收电波。如图4所示,在自主行驶车20中车辆侧gnss天线87和车辆侧gnss天线88经由gnss接收机89与控制装置40连接。控制装置40能够取入车辆侧gnss天线87、88的测量信息。
50.在卫星定位(通过gnss天线87、88、100进行的定位)中,姿势信息作为方位角来测定。
51.如图1、图3所示,全站仪110设置在自主行驶车20行驶的地上侧。全站仪110是已知点,能够在制作地图时测定自主行驶车20的位置坐标和姿势信息(方位角)。详细地说,在自主行驶车20设置有反射构件(例如360度棱镜)90,在反射构件90使全站仪110发出的光波反射并由全站仪110接收。并且,通过由反射构件90使来自全站仪110的光波反射,能够观测全站仪110与反射构件90之间的相对位置来测定自主行驶车20的位置坐标和姿势信息(方位角)。
52.如图4所示,全站仪110的测量信息经由无线通信机111通过无线被发送到自主行驶车20。该全站仪110的测量信息在自主行驶车20中经由无线通信机92被取入到控制装置40中。在全站仪(测量设备)110的测量中,姿势信息作为方位角来测定。
53.如图1所示,在自主行驶车20中使来自全站仪110的光波反射的反射构件90、照相机30以及车辆侧gnss天线87配置在同一铅垂轴axv上。
54.如图4所示,控制装置40的地图制作部70在室外制作地图时得到地上侧gnss天线100的测量信息和车辆侧gnss天线87、88的测量信息。然后,地图制作部70能够基于这些信息,根据由照相机30取得的路面sr的图像来制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像。另外,控制装置40的地图制作部70在室内制作地图时,能够基于全站仪110的测量信息,根据由照相机30取得的路面sr的图像来制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像。
55.接下来,说明作用。
56.图6示出在自主行驶车20的室外的行驶中控制装置40的地图制作部70执行的室外的地图制作处理。图7示出在自主行驶车20的室内的行驶中控制装置40的地图制作部70执行的室内的地图制作处理。图8的(a)示出照相机30的拍摄定时。图8的(b)示出地上侧gnss天线100的数据取得定时。图8的(c)示出车辆侧gnss天线87、88的数据取得定时。图8的(d)示出全站仪110的数据取得定时。图8的(e)示出室外行驶时的关联。图8的(f)示出室内行驶时的关联。
57.在室外进行地图制作处理时,地图制作部70在图6的步骤s10中保存按设定的距离间隔由照相机30取得的图像数据和时刻数据。在图8的(a)中,例如在时刻t1、t2、t3保存图像数据。时刻数据是由照相机30取得了图像数据的时刻的数据。
58.在室外制作地图图像时,一边使自主行驶车20低速行驶一边在希望的行驶路径上进行各计测数据的测定。或者,在室外制作地图图像时,一边反复使自主行驶车20停止和行驶一边在希望的行驶路径上进行各计测数据的测定。
59.地图制作部70在图6的步骤s11中按等时间间隔保存地上侧gnss天线100和车辆侧gnss天线87、88的取得数据和时刻数据。在图8的(b)中,例如在时刻t11、t12、t13、t14、t15保存地上侧gnss天线100的取得数据。在图8的(c)中,例如在时刻t21、t22、t23、t24、t25保存车辆侧gnss天线87、88的取得数据。
60.地图制作部70在图6的步骤s12中搜索在时间上与由照相机30拍摄了图像的时刻最接近的地上侧gnss天线100和车辆侧gnss天线87、88的取得数据,并将其与图像数据相关联。在图8的(e)中,例如将地上侧gnss天线100的取得数据b1及车辆侧gnss天线87、88的取得数据c1关联到照相机30的取得数据a1。将地上侧gnss天线100的取得数据b3及车辆侧gnss天线87、88的取得数据c3关联到照相机30的取得数据a2。将地上侧gnss天线100的取得
数据b5及车辆侧gnss天线87、88的取得数据c5关联到照相机30的取得数据a3。
61.由此,能够将全部信息(计算值)输入到1个处理系统(控制装置40)而通过时间来整理数据。
62.在图1中,由车辆侧gnss天线87接收来自4个人造卫星s1~s4的电波并且同时由地上侧gnss天线100接收来自4个人造卫星s1~s4的电波,来求出自主行驶车20的位置坐标(纬度经度)和姿势信息。另外,由车辆侧gnss天线88接收来自4个人造卫星s5~s8的电波并且同时由地上侧gnss天线100接收来自4个人造卫星s5~s8的电波,来求出自主行驶车20的位置坐标(纬度经度)和姿势信息。
63.此外,代替图1,如图9所示,由车辆侧gnss天线87接收来自4个人造卫星s1~s4的电波并且同时由地上侧gnss天线100接收来自4个人造卫星s1~s4的电波,来求出自主行驶车20的位置坐标(纬度经度)和姿势信息。另外,也可以由车辆侧gnss天线88接收来自4个人造卫星s1~s4的电波并且同时由地上侧gnss天线100接收来自4个人造卫星s1~s4的电波,来求出自主行驶车20的位置坐标(纬度经度)和姿势信息。
64.在此,由作为已知点的地上侧gnss天线100和作为未知点的车辆侧gnss天线87同时观测来自卫星的电波,进行观测作为未知点的自主行驶车20的位置坐标的干涉定位,特别是,通过rtk-gnss(real time kinematic-global navigation satellite system:实时动态-全球导航卫星系统)方式进行定位。同样地,由作为已知点的地上侧gnss天线100和作为未知点的车辆侧gnss天线88同时观测来自卫星的电波,进行观测作为未知点的自主行驶车20的位置坐标的干涉定位,特别是,通过rtk-gnss方式进行定位。通过这样在车辆侧设置卫星定位设备(gnss天线87、88)并且在地上侧设置卫星定位设备(gnss天线100),将地上侧(基准侧)的测定信息发送到移动体侧(车辆侧)并利用rtk-gnss方式进行定位,能够减少误差。从而,能实现由地图精度的提高所带来的自身位置推定精度的提高和自动行驶精度的提高。另外,通过设置2个车辆侧gnss天线,能够从2个点的位置算出姿势信息(方位角)。
65.具体地说,例如,通过使用了地上侧gnss天线100和车辆侧gnss天线87的干涉定位来算出位置坐标。另外,从由使用地上侧gnss天线100和车辆侧gnss天线87进行干涉定位所得到的位置和由使用地上侧gnss天线100和车辆侧gnss天线88进行干涉定位所得到的位置这2个点的位置算出姿势信息(方位角)。
66.另外,无线通信机根据地图制作范围来变更方式,在半径小于500m的情况下设为特定小功率无线通信,在半径为500m以上时设为lte分组通信。
67.在室内进行地图制作处理时,地图制作部70在图7的步骤s20中保存按设定的距离间隔由照相机30取得的图像数据和时刻数据。在图8的(a)中,例如在时刻t1、t2、t3保存图像数据。
68.在室内制作地图图像时,一边使自主行驶车20低速行驶一边在希望的行驶路径上测定各计测数据。或者,在室内制作地图图像时,一边使自主行驶车20反复停止和行驶一边在希望的行驶路径上测定各计测数据。
69.地图制作部70在图7的步骤s21中按等时间间隔保存全站仪110的取得数据和时刻数据。在图8的(d)中,例如在时刻t31、t32、t33、t34、t35保存取得数据。
70.地图制作部70在图7的步骤s22中搜索在时间上与由照相机30拍摄了图像的时刻最接近的全站仪110的取得数据,并将其与图像数据相关联。在图8的(f)中,例如将全站仪
110的取得数据d1关联到照相机30的取得数据a1。将全站仪110的取得数据d3关联到照相机30的取得数据a2。将全站仪110的取得数据d5关联到照相机30的取得数据a3。由此,能进行室内的高精度地图制作。
71.这样,通过进行图6的步骤s12的处理,在制作地图(离线处理)时,地图制作部70检索在时间上与由照相机30取得了路面sr的图像的时刻最接近的地上侧gnss天线100的测量信息和车辆侧gnss天线87、88的测量信息。然后,地图制作部70制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像61。对全部图像进行此过程以制作关联后的路面sr的地图图像61。同样地,通过进行图7的步骤s22的处理,在制作地图(离线处理)时,地图制作部70检索在时间上与由照相机30取得了路面sr的图像的时刻最接近的全站仪110的测量信息。然后,地图制作部70制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像61。对全部图像进行此过程以制作关联后的路面sr的地图图像61。
72.根据上述实施方式,能够得到以下这样的效果。
73.(1)作为自主行驶系统10的构成,具备作为路面图像取得装置的照相机30,照相机30设置在自主行驶车20的车体21的下表面22,取得车体21的下方的路面sr的图像。具备存储部60,存储部60搭载于自主行驶车20,存储被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像61。具备推定部51,推定部51搭载于自主行驶车20,通过对从由照相机30取得的路面sr的图像提取出的特征f1~f5和从地图图像61提取出的特征进行比较来推定自主行驶车20的位置坐标和姿势信息。具备作为地上侧卫星信号接收天线的地上侧gnss天线100,地上侧gnss天线100设置在自主行驶车20行驶的地上侧,从人造卫星s1~s8接收电波。具备无线通信机91、102,无线通信机91、102用于将地上侧gnss天线100的测量信息通过无线发送到自主行驶车20。具备作为车辆侧卫星信号接收天线的车辆侧gnss天线87、88,车辆侧gnss天线87、88搭载于自主行驶车20,从人造卫星s1~s8接收电波。具备地图制作部70,地图制作部70搭载于自主行驶车20,在室外制作地图时,基于地上侧gnss天线100的测量信息和车辆侧gnss天线87、88的测量信息,根据由照相机30取得的路面sr的图像来制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像61。
74.据此,在自主行驶车20搭载有gnss天线87、88。另外,设置在地上侧的地上侧gnss天线100的测量信息通过无线被发送到自主行驶车20。并且,在搭载于自主行驶车20的地图制作部70中,在室外制作地图时,基于地上侧gnss天线100的测量信息和车辆侧gnss天线87、88的测量信息,根据由照相机30取得的路面的图像来制作被关联了自主行驶车20的位置坐标和姿势信息的路面的地图图像。
75.从而,能够进一步减少误差地制作被关联了自主行驶车的位置坐标和姿势信息的路面的地图图像。其结果是,能够提高与取得的图像相关联的自主行驶车20的位置坐标和姿势信息的精度。
76.即,通过使用搭载于自主行驶车20的卫星信号接收天线和设置在地上侧的卫星信号接收天线(已知点)进行干涉定位,与进行1点定位的情况相比,能对自主行驶车20的位置坐标(2维坐标)和姿势信息进行更高精度的定位。
77.(2)地图制作部70检索在时间上与由照相机30取得了路面sr的图像的时刻最接近的地上侧gnss天线100的测量信息和车辆侧gnss天线87、88的测量信息,制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像61。从而,能进行高精度的定位。
78.(3)在自主行驶车20中将照相机30和车辆侧gnss天线87配置在同一铅垂轴axv上。从而,通过使照相机30的位置与车辆侧gnss天线87的位置对准,能进行高精度的定位。
79.(4)具有2个车辆侧gnss天线(87、88)。从而,使用搭载于自主行驶车20的2个卫星信号接收天线(87、88)能够得到自主行驶车20的准确的姿势信息(方位信息)。
80.(5)作为自主行驶系统10的构成,具备作为测量设备的全站仪110,全站仪110设置在地上侧,对自主行驶车20的位置坐标和姿势信息(方位角)进行测量。具备作为测量设备用无线通信机的无线通信机92、111,无线通信机92、111用于将全站仪110的测量信息通过无线发送到自主行驶车20。地图制作部70在室内制作地图时,基于全站仪110的测量信息,根据由照相机30取得的路面sr的图像来制作被关联了自主行驶车20的位置坐标和姿势信息的路面sr的地图图像61。
81.据此,在地上侧设置有全站仪110,关于自主行驶车20的位置坐标和姿势信息(方位角)的测量信息通过无线被发送到自主行驶车20。并且,在地图制作部70中,在室内制作地图时,基于全站仪110的测量信息,根据由照相机30取得的路面的图像来制作被关联了自主行驶车20的位置坐标和姿势信息的路面的地图图像。
82.其结果是,在室内,能够制作被关联了自主行驶车20的位置坐标和姿势信息的路面的地图图像。
83.(6)在自主行驶车20中将使全站仪110的光波反射的反射构件90、照相机30以及车辆侧gnss天线87配置在同一铅垂轴axv上。从而,通过使照相机30的位置、车辆侧gnss天线87的位置以及反射构件90的位置对准,能进行高精度的定位。
84.实施方式不限于上述,例如,也可以如下进行具体化。
85.ο虽然使用了2个车辆侧gnss天线(车辆侧卫星信号接收天线)87、88,但是也可以仅有1个。
86.ο仅在室外行驶的情况下,也可以将测量设备(全站仪)废除,通过从gnss天线得到的位置坐标和姿势信息来制作地图。由此,能实现系统成本的降低。
87.ο在室内外行驶的情况下,也可以追加方位磁针等能在室内进行计测的方位计。由此,能实现室内外地图精度的提高。
88.ο虽然使用了照相机30作为路面图像取得装置,但是也可以使用照相机以外的设备作为路面图像取得装置。作为路面图像取得装置,例如,也能够使用线性传感器(线性图像传感器)。
89.ο虽然使用了地上侧gnss天线100作为地上侧卫星信号接收天线并且使用了车辆侧gnss天线87、88作为车辆侧卫星信号接收天线,但是也可以取而代之,使用地上侧gps天线作为地上侧卫星信号接收天线并且使用车辆侧gps天线作为车辆侧卫星信号接收天线。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。