1.本公开涉及无人机技术领域,具体涉及一种无人机。
背景技术:
2.随着社会的发展,人民生活水平的提高,人们对自己所居住的环境有所要求,现代社会的飞速发展使人们对社会的认知更加宽广,人们都在更加简便的生活方式,减轻自己的劳动负担,无人机的发明,给消费者的工作和生活带来便利,比如利用无人机灌溉、施肥、施药等,还有常见的利用无人机拍摄照片与视频。
3.当前的无人机,限于自身结构的设计,其强度有限,从而难以适用于复杂环境下的作业,这限制了无人机的环境适用能力,从而难以满足用户的需求。
技术实现要素:
4.本公开提供一种无人机可以解决上述技术问题。该无人机包括安装框,安装框包括连接部、端板和两个侧板,连接部和端板相对设置,两个侧板相对设置,连接部和端板通过侧板连接,连接部、端板和侧板围设成安装腔。
5.本公开提供一种无人机,在该中,连接部、端板和侧板为一体成型结构。
6.在上述方案中,安装框的结构会更加稳固,从而提高整个无人机机身的强度,并对无人机中的功能器件(例如电池、飞控模块等)进行保护,提高无人机在更复杂环境中的作业能力。
7.本公开提供的无人机还可以包括安装板,安装板位于安装腔中并连接在两个侧板上。安装腔被安装板分割为第一子安装腔和第二子安装腔,连接部、安装板和侧板围设成第一子安装腔,端板、安装板和侧板围设成第二子安装腔。
8.在上述方案中,安装板可以分割安装腔的空间,以便于规划不同功能元件的安装位置,减少功能元件之间的干扰;此外,安装板可以支撑侧板,从而对安装框进行加固,以提高整个安装框的强度。
9.在本公开提供的无人机中,安装板和侧板可以为一体成型结构。
10.在上述方案中,所述安装板可以进一步增加整个安装框的强度,提高无人机在更复杂环境中的作业能力。
11.本公开提供的无人机还可以包括电池,电池配置为可拆卸安装在第二子安装腔中。
12.在本公开提供的无人机中,侧板、安装板和端板的用于围设第二子安装腔室的侧壁中的至少一个具有导向形状,具有导向形状的侧壁设置为在电池安装进第二子安装腔的过程中提供导向和阻尼。
13.在上述方案中,在导向形状的侧壁的作用下,电池可以更加方便地安装进第二子安装腔中,而且在阻尼的作用下,可以减缓电池进入第二子安装腔的速度,以免电池在安装过程中因为速度过快导致的磨损或者碰撞损坏。
14.本公开提供的无人机还可以包括至少两个机臂、至少两个机翼和至少两个动力组件。机臂分别安装在连接部的相对的两端,机翼分别位于机臂的远离连接部的端部,动力组件分别位于机臂的远离连接部的端部,且配置为与机翼电连接以驱动机翼转动。
15.在本公开提供的无人机中,动力组件包括安装座、驱动装置和电调。安装座固定在机臂上,驱动装置固定在安装座上,电调固定在机臂或者安装座上,配置为与驱动装置电连接并控制驱动装置的输出功率。
16.本公开提供的无人机还可以包括至少两个枢接部,枢接部安装在连接部的两个相对端,枢接部包括枢接腔,机臂的朝向连接部的一端容纳在枢接腔中,以通过枢接部安装在连接部上。
17.在本公开提供的无人机中,连接部中设置有弹性槽,弹性槽的侧壁设置有过线孔以连通枢接腔和弹性槽。
18.在本公开提供的无人机中,端板可以设有定位部(下述的定位槽),以在安装框和其它结构(例如下述的负载框)安装时用于进行定位。
附图说明
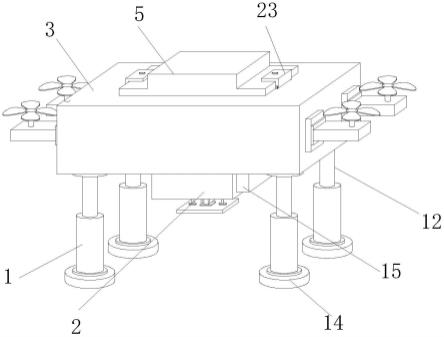
19.图1为本公开一实施例提供的一种无人机的立体结构示意图。
20.图2为图1所示无人机的俯视图。
21.图3为图1所示无人机中的安装框的立体结构示意图。
22.图4为图3所示安装框的仰视图。
23.图5为图3所示安装框旋转之后的侧视图。
24.图6为图1所示无人机中的设置有安装板的安装框的立体结构示意图。
25.图7为图6所示安装框的仰视图。
26.图8为图1所示无人机的部分结构示意图。
27.图9为图8所示结构的仰视图。
28.图10为图6所示的电连接器的平面结构示意图。
29.图11为图10所示的电连接器的立体结构示意图。
30.图12为图1所示无人机的部分结构示意图,其示出了支撑架。
31.图13为图12所示结构的仰视图。
32.图14为图12所示的无人机的部分结构旋转之后的侧视图。
33.图15为图12所示的无人机中的支撑架的立体结构示意图。
34.图16为图1所示无人机的部分结构示意图,其示出了安装框和负载的连接关系。
35.图17为图16所示的结构翻转之后的示意图。
36.图18为图1所示无人机中用于连接安装框和负载框的连接组件的结构示意图。
37.图19为图18所示的连接组件翻转之后的侧视图。
38.图20为图1所示的负载模块中的负载框的立体结构示意图。
39.图21为图20所示负载框翻转之后的立体结构示意图。
40.图22为图1所示的负载模块的立体结构示意图。
41.图23为图22所示负载模块翻转之后的立体结构示意图。
42.图24为图1所示负载模块和喷洒系统中的储液装置的固定关系的结构示意图。
43.图25为图1所示的无人机的侧视图。
44.图26为图25所示的无人机在机臂弯折之后的结构示意图。
具体实施方式
45.下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
46.在本公开至少一个实施例中,如图1和图2所示,无人机可以包括机身(包括安装框11)、机臂2、负载模块(包括负载框51和起落架3)、电池7、动力组件(例如动力装置43),还可以包括诸如飞控模块、通信模块及相应的线路总成等。机臂2分布于机身的两侧并与机身连接。起落架3固定于机身下方以保证无人机起飞和着陆的稳定性。动力组件固定于机臂2远离机身的端部,以向无人机的飞行提供升力。负载模块搭载于机身上,以用于承载诸如待喷洒或者待运输的物品等负载,电池6固定于机身上以为动力组件4等提供电力。飞控模块和通信模块固定于机身上,以用于控制无人机的飞行状态,例如飞控模块用于控制无人机的飞行姿势。
47.如图1和图2所示,无人机可以包括至少两个机臂2、至少两个机翼(可以看作动力装置43的一部分结构)和至少两个动力组件。机臂2分别安装在连接部111的相对的两端,机翼分别位于机臂的远离连接部的端部,动力组件分别位于机臂2的远离连接部111的端部,且配置为与机翼电连接以驱动机翼转动。动力组件可以包括安装座41、驱动装置42和电调44。安装座41固定在机臂2上,驱动装置42固定在安装座41上,电调44固定在机臂2或者安装座41上,配置为与驱动装置42电连接并控制驱动装置42的输出功率,驱动装置42的输出功率控制机翼的旋转速度,即,可以控制无人机的飞行高度、速度等。
48.如图3~图5所示,本公开的实施例提供的无人机的安装框11可以包括连接部111、端板113和两个侧板112,连接部111和端板113相对设置,两个侧板112相对设置,连接部111和端板113通过侧板112连接,连接部111、端板113和侧板112围设成安装腔110。安装腔110中用于容纳诸如电池等功能模块以对该些功能模块进行保护,此外,安装框11可以构成机身的主体结构,无人机主要通过安装框11来搭载诸如通信模块、机臂等结构。
49.在当前的无人机设计中,安装框是通过多个板拼接形成的,如此,在凹碰撞、挤压时,安装框极容易产生变形,从而使得拼接的板之间产生松动甚至脱离,使得安装框的稳固性降低,从而严重限制了无人机的环境适用能力。
50.本公开至少一个实施例提供的无人机,至少可以解决上述技术问题。在该实施例中,连接部、端板和侧板可以为一体成型结构。如此,安装框的结构会更加稳固,从而提高整个无人机机身的强度,并对无人机中的功能器件(例如电池、飞控模块等)进行保护,提高无人机在更复杂环境中的作业能力。示例性的,如图3~图5所示,连接部111、端板113和侧板112的连接处不存在物理界面,即,连接部111、端板113和侧板112为一板材连续的整体结构。例如,连接部111、端板113和侧板112可以通过注塑、铸压(例如热塑等)、3d打印等工艺形成。
51.本公开至少一个实施例提供的无人机还可以包括安装板,安装板位于安装腔中并
连接在两个侧板上。安装腔被安装板分割为第一子安装腔和第二子安装腔,连接部、安装板和侧板围设成第一子安装腔,端板、安装板和侧板围设成第二子安装腔。如此,安装板可以分割安装腔的空间,以便于规划不同功能元件的安装位置,减少功能元件之间的干扰;此外,安装板可以支撑侧板,从而对安装框进行加固,以提高整个安装框的强度。示例性的,如图1~图8所示,两个侧板112之间设置有安装板116,安装板116将安装腔110分割为第一子安装腔1201和第二子安装腔1202,第一子安装腔1201为安装腔110的由连接部111、安装板116和侧板112围成的部分,第二子安装腔1202为安装腔110的由端板113、安装板116和侧板112围成的部分。第一子安装腔1201和第二子安装腔1202中可以容纳不同的模组结构,从而避免该些模块之间产生干扰。此外,如果未设置安装板116,连接部111、端板113和侧板112围成的安装框11大致为矩形结构,在受到挤压时即便连接部111、端板113和侧板112本身没有产生变形,但是连接部111、端板113和侧板112的连接处因应力过大从而仍是容易产生变形的。在设置安装板116之后,侧板112受到安装板116的支撑,部分应力会集中在侧板112和安装板116的连接处,从而使得应力进一步分散,以减少整个安装框11产生变形的风险。
52.在本公开一些实施例提供的无人机中,安装板和侧板可以为一体成型结构。如此,所述安装板可以进一步增加整个安装框的强度,提高无人机在更复杂环境中的作业能力。
53.在本公开另一些实施例提供的无人机中,安装板可以设置为可拆卸安装在安装框中。如此,可以便于通过拆卸安装板,以对安装框中的功能模块进行维修、更换等。
54.本公开至少一个实施例提供的无人机还可以包括电池,电池配置为可拆卸安装在第二子安装腔中。示例性的,如图1~图8所示,电池6位于由端板113、安装板116和侧板112围成的第二子安装腔1202中。如此,安装框11可以搭载电池6以为其它的功能模块提供电源。
55.在本公开至少一个实施例提供的无人机中,侧板、安装板和端板的用于围设第二子安装腔室的侧壁中的至少一个具有导向形状,具有导向形状的侧壁设置为在电池安装进第二子安装腔的过程中提供导向和阻尼。如此,在导向形状的侧壁的作用下,电池可以更加方便地安装进第二子安装腔中,而且在阻尼的作用下,可以减缓电池进入第二子安装腔的速度,以免电池在安装过程中因为速度过快导致的磨损或者碰撞损坏。示例性,如图1~图8和图13所示,侧板112的用于限定第二子安装腔1202的侧壁中设置有导向模块127,该导向模块127使得侧板112的侧壁形成导向形状,以对电池7的安装形成导向和阻尼作用。
56.在当前的无人机中,电池需要向多个功能模块供电,从而需要设置非常多的供电线路。在当前的无人机中,该些线路彼此交错,不能实现走线整洁,在实际应用中,容易出现线路因缠绕等而出现损坏的问题。
57.本公开至少一个实施例提供的无人机还可以包括电连接器。该电连接器安装在安装板上,且位于安装板和电池之间。电连接器且配置为与电池电连接,以输出电能。如此,通过将电连接器安装在安装板上,可以便于依据安装板排布从电连接器和电池中引出的线路,以使得布线整洁,具体可以参见如图6~图7和图10~图12所示安装在安装板116上的电连接器91。
58.在本公开至少一个实施例提供的无人机中,安装板具有安装槽,电连接器包括固定在安装槽中的插接端子。在电池位于第二子安装腔中的情况下,插接端子与电池接触以彼此电连接。示例性的,如图10和图11所示,在电池6安装进第二子安装腔1202中之后,固定
在安装板116的安装槽内的插接端子912会与电池6电连接,使得电池6可以通过电连接器91向其它功能模块例如无人机的动力装置43供电。
59.在本公开至少一个实施例提供的无人机中,可以进一步将插接端子设置为可浮动地安装在安装板上。如此,在电池插入第二子安装腔中的过程中,插接端子受到电池的挤压而移动,以免阻挡电池插入第二子安装腔,而且也会减少插接端子和电池之间的摩擦损耗。如此,如图10和图11所示的插接端子912相对于安装板116可活动,即,插接端子912的位置可移动,在第二子安装腔中插入电池6以与插接端子912配合的过程中,如若电池6的安装位置和预设位置存在一定的偏差,插接端子912可以自适应地移动到与电池6完全适配的位置,使电池6与插接端子912可以顺利地相连。
60.在本公开至少一个实施例提供的无人机中,安装板包括位于安装槽中的连接柱,插接端子包括安装孔,安装板的连接柱与插接端子的安装孔设置为可配合连接。
61.在本公开至少一个实施例提供的无人机中,电连接器还包括至少部分位于插接端子的安装孔中的弹性件。弹性件在插接端子的浮动过程中提供弹性缓冲。如此,插接端子通过弹性件浮动安装在安装板上,此外弹性件还可以使得插接端子和电池之间保持一定的压力,以维持二者之间的电性连接的稳定性。例如,该弹性件可以为缓冲胶、可弹性变形的构件等。
62.在本公开至少一个实施例提供的无人机中,插接端子还包括固定部、电极片和电连接组件。固定部配置为绝缘结构。电极片包括多个正电极板和多个负电极板,正电极板和负电极板的中间段部分嵌设在固定部中。电连接组件包括正电极连接件和负电极连接件,正电极连接件和负电极连接件的一端分别与正电极板和负电极板连接,正电极连接件和负电极连接件的另一端分别包括电连接部。正电极板和负电极板平行设置。示例性的,如图10和图11所示,插接端子912包括固定部9121、电极片9122以及电连接组件9123。具体而言,固定部9121为绝缘材料,电极片9122包括三个正电极板、三个负电极板以及两个信号电极板。正电极板、负电极板以及信号电极板的中间段嵌设在固定部9121内,正电极板、负电极板以及信号电极板的一端沿固定部9121的端面穿出且平行设置。正电极板和负电极板的另一端分别通过紧固件连接,电连接组件9123包括正极电连接件和负极电连接件,正极电连接件和负极电连接件的一端分别与正电极板和负电极板连接,正极电连接件和负极电连接件另一端分别包括电连接部。
63.在本公开至少一个实施例提供的无人机中,设置有至少四条动力线路。动力线路用于连接动力组件和电连接器。每个动力组件通过两条动力线路连接至插接端子的电连接部,以分别电连接至正电极板和负电极板。如此,通过设置正极电连接件和负极电连接件且使正极电连接件和负极电连接件上的电连接部在空间上错开,使得用于连接每个动力组件的两条动力线路在与正电极板、负电极板连接时不会产生交叉,便于动力线路布线整洁。示例性的,如图10和图11所示,由于电极片9122的正电极板、负电极板以及信号电极板平行设置,而动力组件包括两个动力组件,每个动力组件需要通过两根动力线路与正电极板、负电极板连接,如此会导致电连接器91体积过大,在本公开的实施例中,通过设置正极电连接件和负极电连接件且使正极电连接件和负极电连接件上的电连接部在空间上错开,由此,每个动力组件的两根动力线路与正电极板、负电极板连接时可以彼此不交叉。
64.在本公开至少一个实施例提供的无人机中,安装板和/或侧板上设置有过线槽,以
限位动力线路。
65.本公开至少一个实施例提供的无人机还可以包括固定在安装框上的飞控模块。固定在安装框上的飞控模块。插接端子的电极片还包括两个信号电极板,信号电极板的中间段部分嵌设在固定部中,正电极板、负电极板和信号电极板平行设置。电连接组件包括与信号电极板连接的信号连接件,信号连接件的远离信号电极板的一端包括电连接部,飞控模块通过信号线路连接至信号连接件的电连接部。具体地,可以参见如图8所示的飞控模块7。
66.例如,如图6~图7和图10~图12所示,安装在安装板116上的电连接器91位于飞控模块7与第二子安装腔1202之间,即,电连接器91位于飞控模块7与电池6之间,如此在布线时,从电池6引出的线路可以直接经过电连接器91连接至飞控模块7,从而减少线路的布置距离,且不需要绕线布置或者减少绕线布置的长度,以方便飞控模块与电连接器91连接。
67.本公开至少一个实施例提供的无人机还可以包括电连接器外壳,电连接器外壳位于第二子安装腔中且固定于安装板上。电连接器外壳覆盖电连接器,以使得电连接器位于安装板和电连接器外壳之间。如此,通过电连接器外壳可以保护电连接器及其中排布的线路,从而提高无人机性能的可靠性。示例性的,如图7所示,电连接器外壳911覆盖电连接器91,以起到隔绝和防护的作用。
68.本公开至少一个实施例提供的无人机还可以进一步包括飞控模块和转接电路板。飞控模块固定在安装框上。转接电路板配置为可拆卸安装在第一子安装腔中,且与飞控模块电连接以输出飞控模块的控制信号。如此,将转接电路板安装在靠近飞控模块的第一子安装腔中,以对转接电路板进行保护的同时,可以便于飞控模块与其它诸如动力装置、负载、通信模块等模块的连接。示例性的,如图12和图13所示,转接电路板94安装在第一子安装腔1201中。例如,飞控模块7安装在连接部111上,且位于安装腔110(例如其包括的第一子安装腔1201)之外。例如,转接电路板94与动力组件电连接。
69.本公开至少一个实施例提供的无人机还可以包括负载模块,负载模块与转接电路板电连接。负载模块包括泵和储液装置,且转接电路板与泵电连接以控制泵的功率。示例性的,如图1、图2和图12-图13所示,负载模块包括储液装置511,负载模块与转接电路板94电连接,以通过转接电路板94控制用于从储液装置511中抽取材料的泵的输出功率。
70.在本公开至少一个实施例提供的无人机中,负载模块位于安装腔之外,且负载模块和飞控模块位于安装框的两个相对侧,以使得转接电路板位于负载模块和飞控模块之间。示例性的,如图1和图2所示,以无人机的飞行状态为参考,负载模块(例如负载框51)位于安装框11的下方,飞控模块7位于安装框11的上方。
71.在本公开至少一个实施例提供的无人机中,如图12所示,转接电路板94设有用于限定与负载模块连接的线路的位置的限位槽941,如此,不需要绕线设置,可以减少线路布置的空间,并且转接电路板94通过限位槽941可以起到对线路进行加固的作用。
72.在本公开至少一个实施例提供的无人机中,转接电路板位于第一子安装腔种,并位于飞控模块与第二子安装腔之间,第二子安装腔用于安装电池。如此,转接电路板位于飞控模块与第二子安装腔之间,即,转接电路板位于飞控模块与电池之间,如此在布线时,从电池引出的线路(例如经过电连接器之后)可以直接经过转接电路板电连接至飞控模块,从而减少线路的布置距离,且不需要绕线布置或者减少绕线布置的长度,以方便飞控模块与转接电路板连接。
73.本公开至少一个实施例提供的无人机还可以包括通信模块,通信模块安装在安装框上且包括至少一条天线,天线安装在安装腔之外。通信模块与转接电路板电连接。例如,在无人机的飞行状态下,至少一条天线位于安装框的顶端。如此,安装框的顶端的天线处于无人机的最顶端,从而减少信号干扰的风险。示例性的,如图1~图4所示,天线82安装于安装框11的侧板112上,从而位于无人机整个机身的最高点。
74.在本公开至少一个实施例提供的无人机中,至少一个侧板包括本体和天线延伸部,本体用于围设安装腔。在无人机的飞行状态下,天线延伸部位于本体的顶端。安装于安装框顶端的天线安装在天线延伸部上,且位于天线延伸部的背离本体的一侧。示例性的,如图1~图4所示,侧板112上设置有向无人机顶端方向凸出的天线延伸部1122,从而进一步提升天线82的高度,以进一步降低天线82受到信号干扰的风险。
75.在本公开至少一个实施例提供的无人机中,如图3所示,同一个侧板112所包括的天线延伸部1122和本体为一体成型,即,整个侧板112仍保持为一体化的结构。如此,可以提高整个安装框的结构强度,同时可以加固天线。
76.在本公开第至少一个实施例提供的无人机中,天线延伸部的平面形状为三角形。安装于安装框顶端的天线安装在天线延伸部的一个角上,三角形的与角相对的边为天线延伸部和本体的共用边。例如,进一步地,天线延伸部用于安装天线的角至连接部的距离小于至端板的距离,如此,天线延伸部倾向于靠近连接部设置,从而使得其上的天线靠近飞控模块,以减少用于连接该天线的线路布置的空间和距离。示例性的,如图3和图5所示,天线延伸部1122的整体形状为三角形,且用于安装天线82的角相对于端板113更加靠近连接部111。
77.本公开至少一个实施例提供的无人机还可以包括安装部。安装部固定在连接部上且相对于连接部朝向无人机的飞行前端延伸。至少一条天线为多条且包括第一天线、第二天线和第三天线,第一天线固定在安装部上,第二天线为安装在安装框顶端的天线,第三天线安装在连接部上。例如,无人机的通信模块还可以进一步包括固定在安装部上的雷达模块,雷达模块位于安装部的背离连接部的一侧。示例性的,如图1~图7所示,无人机包括设置在连接部111上,且从连接部111向无人机前端方向延伸的安装部115,安装部115可以形成有支撑平台,以和连接部共同支撑飞控模块7。第一天线81通过天线固定架固定于安装部115上且位于电控模块7外侧。第三天线83固定于连接部111上。雷达模块84固定于安装部115上且相对于安装部115位于无人机的前端。
78.在本公开至少一个实施例提供的无人机中,第一天线可以为4g天线,第二天线可以为wifi天线,第三天线可以为rtk天线。需要说明的是,第一天线、第二天线和第三天线的类型可以根据实际需要进行选择,而且通信模块包括的天线的数量也可以根据实际需要进行设计,本公开的实施例对此都不做限制。
79.在无人机的使用过程中,通常面临负载经常拆卸的情况,而且为了便于无人机的维修、保养、运输等,无人机的负载模块和机身(依靠安装框承载的部分)会拆卸,失去负载模块的支撑,机身会接触地面,从而存在机身上的功能模块因接触地面导致受到碰撞、挤压而损坏的风险。
80.本公开至少一个实施例提供的无人机还可以包括支撑架。支撑架包括至少一个支撑结构,且配置为支撑安装框。如此,在安装框放置在地面上时,支撑结构可以对安装框进
行支撑,以避免位于安装框的安装腔中的模块因接触地面而受到损坏。示例性的,如图12~图15所示,连接在安装框11上的支撑架12可以对整个机身(包括安装框11)进行支撑,从而减少安装在安装框11中的功能模块(例如转接电路板、电连接器等)与地面接触的风险。
81.在本公开至少一个实施例提供的无人机中,支撑结构可以包括连接段和至少两个支撑段,支撑段固定在连接部上,连接段用于连接该至少两个支撑段。例如,无人机还可以包括安装件,安装件配置为固定连接支撑段,以将支撑结构固定在连接部上。安装件包括定位凸起,连接部设置有与定位凸起形状匹配的定位凹槽。示例性的,如图9和图15所示,支撑架12形成为管状弯折结构,支撑架12包括相对设置的两个支撑段121以及连接在两支撑段121之间的连接段122,支撑段121从机身向下方弯折,支撑段121的自由端通过安装件13固定于连接部111下方,支撑段121用于支撑安装框11。安装件13上形成有定位凸起131。
82.在本公开至少一个实施例提供的无人机中,如图15所示,支撑段121的与连接段122连接的部分向朝向连接部111(或者安装框11)的方向弯曲,以使得支撑段121的距离连接部111最大的部分位于支撑段121的两端之间。如此,在安装框11放置在地面上时,支撑段121与地面会有更大的接触面积,以免支撑段121陷入地面,从而增加无人机的稳定性。
83.在本公开至少一个实施例提供的无人机中,至少一个侧板包括本体和支撑部,本体用于围设安装腔,且在无人机的飞行状态下,支撑部位于本体的底端。如此,支撑部和支撑结构共同支撑安装框,以进一步降低位于安装框的安装腔中的模块因接触地面而受到损坏的风险。示例性的,如图3~图5所示,侧板112上设置有向无人机底端方向凸出的支撑部1121。在将机身防止在地面上时,支撑部1121可以抬高整个安装框11的高度。
84.在本公开至少一个实施例提供的无人机中,如图1~图8所示,电池6的至少部分穿过安装腔110(例如第二子安装腔1202)。在安装框的面向支撑部的一侧,电池6的位于安装腔110之外的部分的长度小于支撑部1121的背离本体的一端至本体的距离。如此,在安装框11放置在地面上时,受支撑部1121的支撑,电池6不会接触地面,从而降低电池6碰撞损坏的风险。需要说明的是,在拆卸无人机以将安装框放置在地面的情况下,无人机并非处于工作状态,在此情况下,电池通常也是可以拆卸下来的,因此,在一些实施例中,支撑部可以不需要设置为具有避免电池和地面接触的尺寸,从而有利于机身的小型化设计。
85.在本公开至少一个实施例提供的无人机中,如图3所示,同一个侧板112所包括的支撑部1121和本体为一体成型。如此,安装框11和支撑部1121的结构稳固,从而提高整个无人机结构的稳定性,以提高无人机的环境适应能力。
86.在本公开一些实施例提供的无人机中,示例性的,如图3和图5所示,支撑部1121的平面形状为梯形,支撑部1121的背离本体的一端为梯形的顶。如此,在安装框11放置在地面上时,支撑部1121与地面有较大的接触面积,以免支撑部1121陷入地面,从而增加无人机的稳定性。
87.在本公开另一些实施例提供的无人机中,支撑部的斜边以及背离本体的尖端构成类v形状,即,支撑部整体形状为三角形,该三角形的一个角背离本体。如此,可以增加支撑部的导向作用,从而使得支撑部更容易插入负载的穿孔中,以提高负载框和安装框的安装效率。
88.在本公开至少一个实施例提供的无人机中,支撑部的面向端板的侧边为斜边,斜边的连接梯形的顶的一端至端板的距离大于斜边的连接梯形的底的一端至端板的距离。示
例性的,如图3和图5所示,支撑部1121的背离本体的一端至连接部111的距离大于至端板113的距离。如此,可以使得支撑部1121的支撑尺寸增加,从而提高无人机的稳定性。
89.在本公开至少一个实施例提供的无人机中,如图3和图12~图15所示,支撑段121的与连接段122连接的一端至端板113的距离大于支撑段121的与连接部111连接的一端至端板113的距离,即,支撑段121向无人机的前端延伸,支撑段121和支撑部1121所共同限定的支撑尺寸较大,从而进一步提高无人机的稳定性。
90.例如,在本公开至少一个实施例提供的无人机中,负载框内侧表面可以设有用于在插入安装框时导向的斜面,以方便机身的安装框插入至负载框的穿孔内并与负载框连接固定。
91.在本公开至少一个实施例提供的无人机中,如图16~图23所示,负载模块包括负载框51和起落架2。负载框51可拆卸安装在安装框11上,起落架3固定在负载框51上以通过负载框51对安装框11进行支撑。如此,负载模块和安装框11之间便于安装,降低负载模块和安装框11之间因固定连接导致对负载的安装和拆卸。
92.在本公开至少一个实施例提供的无人机中,端板的背离连接部的一侧设置有凸起部,凸起部的面向负载模块的一侧设置有定位槽,负载框的边缘包括与端板的定位槽匹配的定位凸起。定位凸起有助于安装框和负载模块的快速定位,以提高负载模块和安装框之间的安装效率。示例性的,如图1、图2和图16~图20所示,端板113的定位槽1130和负载框51的定位凸起对应,从而定位负载框51和安装框11,然后通过连接组件53将负载框51和安装框11连接在一起。
93.在本公开至少一个实施例提供的无人机中,如图1~图2和图12~图16所示,起落架3的背离安装框11的一端至安装框11的距离大于支撑架12的背离安装框11的一端至安装框11的距离。如此,在负载模块和安装框11固定连接的情况下,起落架3用于支撑整个无人机机身。
94.在本公开至少一个实施例提供的无人机中,如图1~图2和图12~图16所示,起落架3的背离安装框11的一端至安装框11的距离大于支撑部1121的背离本体的一端至本体的距离。如此,在负载模块和安装框11固定连接的情况下,起落架3用于支撑整个无人机机身。
95.在本公开至少一个实施例提供的无人机中,如图1~图2和图12~图16所示,在安装框11的面向支撑部1121的一侧,电池6的位于安装腔之外的部分的长度小于支撑部的背离本体的一端至本体的距离。如此,在负载模块和安装框11固定连接的情况下,支撑部1121不会接触地面,起落架3用于支撑整个无人机机身。
96.在本公开至少一个实施例提供的无人机中,如图1~图4和图16~图23所示,负载框51限定有穿孔510,穿孔510与安装框11的安装腔110对应。如此,负载框51的穿孔可以与安装框11的安装腔110对应,以提高容纳空间。如此,将负载模块和安装框安装之后,无人机的重心相对下移,便于无人机的飞行和地面放置时的稳定性。
97.本公开至少一个实施例提供的无人机中,如图1~图4和图16~图23所示,电池6的至少部分穿过安装腔110以进入穿孔510中。如此,可以提高电池6的设计体积,以提高无人机的续航能力。此外,负载模块设置在无人机机身(包括安装框)的下方,电池向下穿过机身(例如其中的安装框的第二子安装腔)进入并伸入穿孔510,使得无人机整体的重心靠下,从而具有更好的稳定性。
98.在本公开至少一个实施例提供的无人机中,电池穿过负载框并进入起落架限定的空间之内。示例性的,如图1~图4和图16~图23所示,电池6不仅进入穿孔510而且进一步进入起落架3所限定的空间之内。电池6的伸入起落架3所限定的空间中的部分可以与负载(下述的储液装置511)并列,如此,可以进一步使得无人机的重心下移,便于无人机的飞行和地面放置时的稳定性。
99.在本公开至少一个实施例提供的无人机中,电池的位于起落架限定的空间之内的部分的体积为电池总体积的至少三分之一。示例性的,如图1~图4和图16~图23所示,电池6的伸入起落架3所限定的空间中的部分为电池总体积的1/3~2/3,例如电池6的其它部分位于负载框51的穿孔510以及安装框11的安装腔110(例如其包括的第二子安装腔1202)之内。
100.在本公开至少一个实施例提供的无人机中,如图1~图4和图16~图23所示,喷洒系统的储液装置511的至少部分可以位于穿孔510中。在穿孔510中,储液装置511和电池6沿着无人机的前端至后端的方向依次排布。如此,可以解放无人机的安装框对储液装置511的束缚,提高储液装置511的设计体积,以提高无人机的作业能力。
101.在本公开至少一个实施例提供的无人机中,如图1~图2和图24所示,起落架3设置为限位储液装置511的位于穿孔之外的部分,以对储液装置511进行支撑。如此,可以解放无人机的安装框11以及负载框51对储液装置511的束缚,进一步提高储液装置511的设计体积,以进一步提高无人机的作业能力。
102.在本公开至少一个实施例提供的无人机中,如图1~图4和图16所示,在负载模块安装在安装框11上的情况下,支撑部1121位于穿孔510中。如此,在负载框和安装框11的固定过程中,位于穿孔510内的支撑部1121可以起到导向的作用,从而便于负载框51和安装框11的安装。
103.在本公开一些实施例提供的无人机中,如图1~图5和图16所示,支撑部1121的面向端板113的侧边为斜边,斜边的连接梯形的顶的一端至端板的距离大于斜边的连接梯形的底的一端至端板113的距离,如此,在支撑部1121的一部分置入穿孔510的情况下,即便在重力的作用下,支撑部1121也会完全滑入穿孔510,从而使得负载框51和安装框11自动对位。
104.在本公开至少一个实施例提供的无人机中,如图1和图2所示,喷洒系统可以包括储液装置511、泵、喷头514和管路组件,储液装置511固定在负载框51和起落架3中,泵固定在储液装置511上,例如泵相对于储液装置511位于无人机的后端,管路组件用于连接泵和喷头514。
105.在本公开至少一个实施例提供的无人机中,如图1和图2所示,喷头514设置在机臂2的远离连接部111的端部。
106.在本公开至少一个实施例提供的无人机中,如图1和图2所示,管路组件包括硬管512和软管(未示出)。硬管512固定在连接部111和侧板112上,且与喷头514连接。软管的一端与硬管512连接,另一端与泵连接。使用硬管512可以使得管路具有较高的强度,并保证管路的畅通,软管可以便于与硬管512连接,从而便于储液装置511的拆卸。
107.在本公开至少一个实施例提供的无人机中,负载框中设置有管道,软管的至少部分容纳于管道中。如此,管路组件的软管部分限位在负载框的管道中,从而使得软管得到保
护。
108.在本公开至少一个实施例提供的无人机中,如图1所示,硬管512的端部设置为宝塔头,以便于与软管连接。宝塔头形状的端部在与软管连接时,可以降低出现漏液情况的风险。
109.在本公开至少一个实施例提供的无人机中,如图25所示,飞控模块7的设定飞行水平面s2(其平行面s2’)相对于起落架3的设定落地平面s1倾斜。
110.在本公开至少一个实施例提供的无人机中,机臂配置为可向无人机的后端折叠,喷洒系统包括喷杆,喷头通过喷杆固定在机臂的远离连接部的端部。喷杆用于使得喷头远离机身,以免喷洒的材料溅射在机身上。如图1~图4和图25和图26所示,起落架3中用于限定设定落地平面的段的靠近端板113(或者无人机后端)的一端至飞控模块7的设定飞行水平面的距离h1,大于起落架3中用于限定设定落地平面的段的靠近连接部111(或者无人机前端)的另一端至飞控模块7的设定飞行水平面的距离h2。如此,在无人机降落在地面上时,相对于飞行状态,起落架3会使得无人机的后端翘起,从而避免机臂2上的喷杆513和喷头514受到碰撞损坏。
111.在本公开至少一个实施例提供的无人机中,飞控模块的设定飞行水平面和起落架的设定落地平面之间的夹角为5~20度,例如进一步为10度、15度等。
112.在本公开至少一个实施例提供的无人机中,飞控模块的安装平面相对于起落架的设定落地平面平行。如此,无人机在平放在地上时,飞控模块处于与水平面平行的状态,在起飞时不需要长时间的姿态校准,提高无人机的起飞效率。例如,如图1~图3和图25和图26所示,飞控模块7固定在安装框11和安装部115的背离负载模块的一侧。安装部115的用于固定飞控模块7的表面为飞控模块7的安装平面。
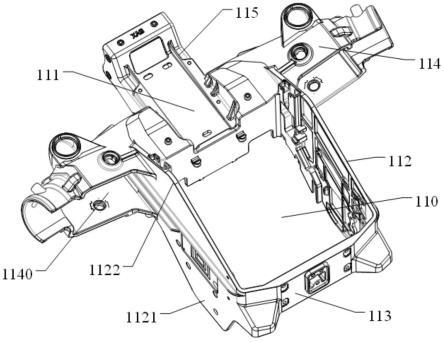
113.在本公开至少一个实施例提供的无人机中,如图1~图3和图25和图26所示,无人机还可以包括至少两个枢接部114,枢接部114安装在连接部111的两个相对端,枢接部114包括枢接腔1140,机臂2的朝向连接部114的一端容纳在枢接腔1140中,以通过枢接部114安装在连接部111上。枢接部114沿与起落架3的设定落地平面垂直的方向的截面为u形,u型的开口朝向无人机的后端。
114.在本公开至少一个实施例提供的无人机中,连接部中设置有弹性槽,弹性槽的侧壁设置有过线孔以连通枢接腔和弹性槽,该些过线孔可以用于通过动力走线和管路组件(例如硬管)。
115.以上所述仅为本公开的较佳实施例而已,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。