内窥镜激光能量传送系统和使用方法
1.优先权声明
2.本技术根据35u.s.c.
§
119(e)要求于2019年8月5日提交的美国临时专利申请序列号62/882,837以及于2019年8月30日提交的美国临时专利申请序列号62/894,280的优先权的权益,其全部内容通过引用并入本文。
技术领域
3.本公开总体上涉及内窥镜激光系统,并且更具体地涉及用于控制在内窥镜手术中传送至目标的激光能量的系统和方法。
背景技术:
4.内窥镜通常用于提供对受试者的内部位置的访问,从而为医生提供视觉访问。内窥镜通常被插入患者体内,将光传送至被检查的目标(例如,目标解剖结构或对象),并且收集从对象反射的光。反射光携带关于被检查对象的信息。一些内窥镜包括工作通道,操作者可以通过该工作通道执行抽吸或传递器械例如刷子、活检针或镊子,或者执行微创手术以从患者的体内去除不需要的组织或异物。
5.激光或等离子系统已经用于将手术激光能量传送至各种目标治疗区域,例如软组织或硬组织。激光疗法的示例包括消融、凝结、汽化、碎裂等。在碎石术应用中,激光已经用于分解肾、胆囊、输尿管以及其他石块形成区域中的结石结构,或者用于将大结石消融成较小的碎片。
技术实现要素:
6.本公开描述了用于在内窥镜手术中将激光能量传送至目标的系统、设备和方法。示例性方法包括产生从内窥镜的远端发射并且入射在目标上的第一激光脉冲串和不同的第二激光脉冲串。第一激光脉冲串具有第一激光能级,并且第二激光脉冲串具有高于第一激光能级的第二激光能级。在示例中,第一激光脉冲串用于在结石结构的表面上形成裂纹,并且第二激光脉冲串在形成裂纹之后引起结石结构的碎裂。
7.示例1是一种向目标提供激光治疗的方法,该方法包括:根据第一激光能级产生第一激光脉冲串,并且根据高于第一激光能级的第二激光能级产生第二激光脉冲串;以及将第一激光脉冲串和第二激光脉冲串从内窥镜的远端引导在目标处。
8.在示例2中,示例1的主题可选地包括:其中,在特定时间段内基本恒定地产生第一激光脉冲串。
9.在示例3中,示例2的主题可选地包括:其中,在产生第一激光脉冲串期间的特定时间段内,间歇地产生第二激光脉冲串。
10.在示例4中,示例1至3中的任何一个或更多个的主题可选地包括:其中,第二激光脉冲串在时间上位于第一激光脉冲串的两个脉冲之间。
11.在示例5中,示例1至4中的任何一个或更多个的主题可选地包括:根据第一激光能
级产生第三激光脉冲串,其中,第二激光脉冲串在时间上位于第一激光脉冲串与第三激光脉冲串之间。
12.在示例6中,示例1至5中的任何一个或更多个的主题可选地包括:将第一激光脉冲串和第二激光脉冲串引导在结石结构处。
13.在示例7中,示例6的主题可选地包括:第一激光脉冲串被配置成在结石结构的表面上形成裂纹,并且第二激光脉冲串被配置成在形成裂纹之后引起结石结构的碎裂。
14.在示例8中,示例1至7中的任何一个或更多个的主题可选地包括:将第一激光脉冲串和第二激光脉冲串引导在目标组织处用于在其中止血或凝结。
15.示例9是一种装置,包括:至少一个处理器;和包括计算机程序代码的至少一个非暂态存储器,至少一个非暂态存储器和计算机程序代码被配置成利用至少一个处理器使装置:使激光系统根据第一激光能级发射第一激光脉冲串并且根据高于第一激光能级的第二激光能级发射第二激光脉冲串;以及将第一激光脉冲串和第二激光脉冲串从内窥镜的远端引导在目标处。
16.在示例10中,示例9的主题可选地包括:第一激光脉冲串在特定时间段内基本恒定。
17.在示例11中,示例10的主题可选地包括:在产生第一激光脉冲串期间的特定时间段内,间歇地发射第二激光脉冲串。
18.在示例12中,示例9至11中的任何一个或更多个的主题可选地包括:其中,至少一个非暂态存储器和计算机程序代码被配置成利用至少一个处理器使装置产生在时间上位于第一激光脉冲串的两个脉冲之间的第二激光脉冲串。
19.在示例13中,示例9至12中的任何一个或更多个的主题可选地包括:其中,至少一个非暂态存储器和计算机程序代码被配置成利用至少一个处理器使装置根据第一激光能级产生第三激光脉冲串,并且产生在时间上位于第一激光脉冲串与第三激光脉冲串之间的第二激光脉冲串。
20.在示例14中,示例9至13中的任何一个或更多个的主题可选地包括:其中,至少一个非暂态存储器和计算机程序代码被配置成利用至少一个处理器使装置在结石结构处传送第一激光脉冲串和第二激光脉冲串;并且第一激光脉冲串被配置成在结石结构的表面上形成裂纹,并且其中,第二激光脉冲串被配置成在形成裂纹之后引起结石结构的碎裂。
21.在示例15中,示例9至14中的任何一个或更多个的主题可选地包括:其中,至少一个非暂态存储器和计算机程序代码被配置成利用至少一个处理器使装置在目标组织处传送第一激光脉冲串和第二激光脉冲串用于在其中止血或凝结。
22.示例16是一种由机器可读的非暂态程序存储设备,其有形地包含由机器可执行的用于执行操作的指令程序,操作包括:根据第一激光能级产生第一激光脉冲串,并且根据高于第一激光能级的第二激光能级产生第二激光脉冲串;以及将第一激光脉冲串和第二激光脉冲串从内窥镜的远端引导在目标处。
23.在示例17中,示例16的主题可选地包括:其中,在特定时间段内基本恒定地产生第一激光脉冲串,并且在产生第一激光脉冲串期间的特定时间段内间歇地产生第二激光脉冲串。
24.在示例18中,示例16至17中的任何一个或更多个的主题可选地包括:其中,操作包
括根据第一激光能级产生第三激光脉冲串,其中,第二激光脉冲串在时间上位于第一激光脉冲串与第三激光脉冲串之间。
25.在示例19中,示例16至18中的任何一个或更多个的主题可选地包括:其中,操作包括在结石结构处传送第一激光脉冲串和第二激光脉冲串;并且其中,第一激光脉冲串被配置成在结石结构的表面上形成裂纹,并且第二激光脉冲串被配置成在形成裂纹之后引起结石结构的碎裂。
26.在示例20中,示例16至19中的任何一个或更多个的主题任选地包括:其中,操作包括在目标组织处传送第一激光脉冲串和第二激光脉冲串用于在其中止血或凝结。
27.该发明内容是对本技术的一些教导的概述,并非旨在是对本主题的排他性或详尽性处理。在具体实施方式和所附权利要求书中找到关于本主题的进一步细节。在阅读和理解以下的具体实施方式并查看形成本公开内容的一部分的附图时,本公开内容的其他方面对于本领域技术人员而言将是明显的,每个方面都不应被视为具有限制意义。本公开内容的范围由所附权利要求及其法律等同内容限定。
附图说明
28.在附图的图中通过示例的方式示出了各种实施方式。这些实施方式是说明性的,并非旨在是本主题的详尽或排他实施方式。
29.图1示出了包括激光反馈控制系统的示例性激光治疗系统的示意图。
30.图2a至图2b示出了包括血红蛋白(hb)和氧合血红蛋白(hbo2)的不同类型组织的吸收光谱的示例。
31.图3a至图3c示出了包括正常组织和碳化组织、hb、hbo2以及黑色素的不同类型组织的吸收光谱的示例。
32.图4是示出激光输出的穿透深度的图。
33.图5是示出用于提供激光输出的激光反馈控制系统的框图。
34.图6至图7是示出用于基于由激光反馈控制系统产生的反馈来控制一个或更多个激光系统的算法的示例的流程图。
35.图8示出了使用两个光波长提供组织消融和凝结的示例性双激光系统的时序图。
36.图9a至图9b示出了插入有激光光纤的内窥镜的示例。
37.图10a至图10b示出了反馈控制的激光治疗系统的示例。
38.图11a至图11b是示出用于使用诸如激光束的诊断束来识别目标的内窥镜系统的示例的图。
39.图12和图13a至图13b是示出用于识别目标类型例如用于识别不同类型肾结石的成分的反射光谱的图。
40.图14至图15示出了对应于uv波长的不同部分的光峰以及图13a至图13b中几种类型石块的反射光谱。
41.图16a至图16b示出了在uv-vis光谱仪上从各种软组织成分和硬组织成分捕获的反射光谱的示例。
42.图16c示出了典型石块成分的ftir光谱的示例。
43.图16d示出了一些软组织成分和硬组织成分的ftir光谱的示例。
44.图17至图18示出了激光治疗系统的示意图。
45.图19a至图19b示出了使用多个(例如,n个)激光脉冲串产生的组合激光脉冲串的示例。
46.图20示出了具有光谱学反馈的示例性光谱学系统的示意图。
47.图21a至图21d示出了具有多光纤配置的内窥镜激光系统的示例。
48.图22是示出如在光谱学光纤传送系统中使用的多光纤系统的示例的框图。
49.图23a至图23b示出了具有源光输入和光谱学反馈信号的多光纤附件的示例。
50.图24a至图24d是示出计算激光传送系统(例如,光纤)的远端与目标之间的距离的示例性方法的图。
51.图25a至图25b示出了组织与光谱学探针远端之间的距离对来自目标的反射光的光谱的影响。
52.图26示出了用于使用诸如激光束的诊断束来识别目标的内窥镜系统的示例。
53.图27示出了用于目标组织或结石结构的激光治疗的具有不同脉冲能量或功率水平的激光脉冲序列的图。
54.图28是示出可以在其上执行本文中讨论的任何一种或更多种技术(例如,方法)的示例机器的框图。
具体实施方式
55.本文中描述了用于在内窥镜手术中将激光能量传送至目标的系统、设备和方法。示例性方法包括提供从内窥镜的远端发射并入射在目标上的第一激光脉冲串和不同的第二激光脉冲串。第一激光脉冲串具有第一激光能级,并且第二激光脉冲串具有高于第一激光能级的第二激光能级。在示例中,第一激光脉冲串用于在结石结构的表面上形成裂纹,并且第二激光脉冲串在形成裂纹之后引起结石结构的碎裂。
56.在内窥镜激光疗法中,期望识别不同的组织,仅将激光能量施加至目标治疗结构(例如,癌组织或特定的结石类型),并且避免或减少将非治疗组织(例如,正常组织)暴露于激光照射。常规地,感兴趣的目标治疗结构的识别由操作者手动执行,例如通过内窥镜使目标手术部位及其周围环境可视化。这样的手动方法至少在一些情况下可能缺乏准确性,例如由于对提供有限手术视野的操作部位的紧密访问,并且可能无法确定目标的成分。活检技术已经被用于从体内提取出目标结构(例如组织),以在体外对其成分进行分析。然而,在许多临床应用中,期望确定体内组织成分以减少手术时间和复杂性并且提高治疗效果。例如,在应用激光来分解或粉碎结石的激光碎石术中,自动和体内识别特定类型的结石(例如,肾或胰胆管或胆囊的石块的化学成分)并且将其与周围组织区分开将允许医生调整激光设置(例如,功率、曝光时间或发射角度)以更有效地消融目标石块,同时避免照射目标石块附近的非治疗组织。
57.常规的内窥镜激光疗法也具有限制,即在手术中不能连续监测组织类型(例如,成分)。在内窥镜手术期间存在许多活动部件,并且从内窥镜观察到的组织可能会在整个手术中发生变化。因为常规的活检技术需要取出组织样本来识别成分,所以它们不能在整个手术中监测组织的成分。在内窥镜的尖端处持续监测和识别结构类型(例如,软组织类型或硬组织类型、正常组织与癌组织或结石结构的成分)可以为医生提供更多信息,以更好地适应
手术期间的治疗。例如,如果医生正在粉碎具有硬表面但是软核的肾结石,则通过内窥镜的连续组织成分信息可以允许医生基于连续检测到的石块表面成分调整激光设置,例如从在石块的硬表面上表现更好的第一设置调整至在石块的软核上表现更好的第二不同设置。
58.如本文中描述的一些特征可以提供能够通过内窥镜在体内识别例如医疗应用中的各种目标的成分(例如,软组织或硬组织)的方法和装置。这可以允许用户在整个手术中连续监测通过内窥镜观察到的目标的成分。这还具有与激光系统结合使用的能力,其中该方法可以向激光系统发送反馈,以基于目标的成分调整设置。该特征可以允许在由用户选择的原始激光设置的设置范围内即时调整激光设置。
59.如本文中描述的一些特征可以用于提供下述系统和方法,该系统和方法在体内测量差异例如目标的化学成分,并且建议激光设置或自动调整激光设置以更好地实现期望的效果。目标和应用的示例包括肾结石的激光碎石术和软组织的激光切割或汽化。在一个示例中,提供了三个主要部件:激光器、光谱学系统和反馈分析器。在示例中,激光系统的控制器可以基于目标成分使用适当的激光参数设置自动对激光疗法进行编程。在示例中,可以基于利用光谱仪数据训练的机器学习算法来控制激光器。附加地或替选地,用户(例如,医生)可以在手术期间连续接收目标类型的指示,并且被提示调整激光设置。通过调整激光设置并且使激光疗法适应单个结石目标的成分部分,可以更快并且以更节能的方式执行石块消融或粉碎过程。
60.如本文中描述的一些特征可以提供用于向反馈分析器提供数据输入以包括互联网连接以及与具有测量功能的其他手术设备的连接的系统和方法。附加地,激光系统可以将输入数据提供给另一系统例如图像处理器,由此手术监视器可以向用户显示与医疗手术相关的信息。例如,这方面的一个示例是在手术期间更清楚地识别视野中的不同软组织、脉管系统、囊组织以及同一目标例如石块中的不同化学成分。
61.如本文中描述的一些特征可以提供用于识别不同的目标类型例如不同的组织类型或不同的结石类型的系统和方法。在一些情况下,单个结石结构(例如,肾、膀胱、胰胆管或胆囊的石块)在其整个体积中可能具有两个或更多个不同的成分,例如透钙磷石、磷酸钙(cap)、二水草酸钙(cod)、一水草酸钙(com)、磷酸镁铵(map)或基于胆固醇或基于尿酸的结石结构。例如,目标结石结构可以包括cod的第一部分和com的第二部分。根据一个方面,本公开描述了用于基于体内光谱学数据的连续收集和分析来连续识别单个目标(例如,单个石块)中包含的不同成分的系统和方法。治疗(例如,激光疗法)可以根据识别的目标成分进行适应。例如,响应于目标石块中第一成分(例如,cod)的识别,激光系统可以利用第一激光参数设置(例如,功率、曝光时间或发射角度等)进行编程,并且相应地传送激光束以消融或粉碎第一部分。在激光疗法期间可以连续收集和分析光谱学数据。响应于在被治疗的同一目标石块中不同于第一成分的第二成分(例如,com)的识别,可以调整激光疗法,例如通过利用不同于激光参数设置(例如,差异功率或曝光时间或发射角度等)的第二激光参数设置对激光系统进行编程,并且相应地传送激光束以消融或粉碎同一目标石块的第二部分。在一些示例中,激光系统中可以包括多个不同的激光源。不同成分的石块部分可以由不同的激光源处理。可以通过石块类型的识别来确定使用合适的激光。
62.如本文中描述的一些特征可以与激光系统相关地用于各种应用,在这些应用中结合不同类型的激光源可能是有利的。例如,本文中描述的特征可能适用于工业或医疗设置,
例如医疗诊断、治疗和手术。如本文中描述的特征可以用于关于内窥镜、激光手术、激光碎石术、激光设置和/或光谱学。
63.图1示出了根据本公开内容的说明性示例的包括激光反馈控制系统100的示例性激光治疗系统的示意图。激光反馈控制系统100的示例应用包括集成至用于许多应用的激光系统中,许多应用例如用于治疗软(例如,非钙化)或硬(例如,钙化)组织或结石结构例如肾或胰胆管或胆囊的石块的工业和/或医疗应用。例如,本文中公开的系统和方法可以用于提供精确控制的治疗处理,例如消融、凝结、汽化等,或者消融、碎裂或粉碎结石结构。
64.参照图1,激光反馈控制系统100可以与一个或更多个激光系统操作通信。尽管图1示出了激光反馈系统连接至第一激光系统102并且可选地(以虚线示出)连接至第二激光系统104,但是在本公开内容的范围内还设想了附加的激光系统。
65.第一激光系统102可以包括第一激光源106,以及关联部件例如电力供应装置、显示器、冷却系统等。第一激光系统102还可以包括与第一激光源106可操作地耦合的第一光纤108。第一光纤108可以被配置成用于将激光输出从第一激光源106传输至目标组织122。
66.在一个示例中,第一激光源106可以被配置成提供第一输出110。第一输出110可以在第一波长范围内延伸。根据本公开内容的一些方面,第一波长范围可以对应于目标组织122的吸收光谱的一部分。吸收光谱表示在激光波长范围内的吸收系数。图2a通过示例的方式示出了水210的吸收光谱。图2b通过示例的方式示出了氧合血红蛋白221的吸收光谱和血红蛋白222的吸收光谱。在这样的示例中,第一输出110可以有利地提供目标组织122的有效消融和/或碳化,这是因为第一输出110在对应于组织的吸收光谱的波长范围内。
67.例如,第一激光源106可以被配置成使得在第一波长范围发射的第一输出110对应于由组织对入射的第一输出110的高吸收(例如,超过约250cm-1
)。在示例方面,第一激光源106可以发射在约1900纳米与约3000纳米之间(例如,对应于由水的高吸收)以及/或者在约400纳米与约520纳米之间(例如,对应于由氧合血红蛋白和/或脱氧血红蛋白的高吸收)的第一输出110。明显地,光与组织相互作用存在两种主要机制:吸收和散射。当组织的吸收高(吸收系数超过250cm-1
)时,第一吸收机制占主导地位,而当吸收低(吸收系数小于250cm-1
)时,例如在800nm至1100nm波长范围的激光,散射机制占主导地位。
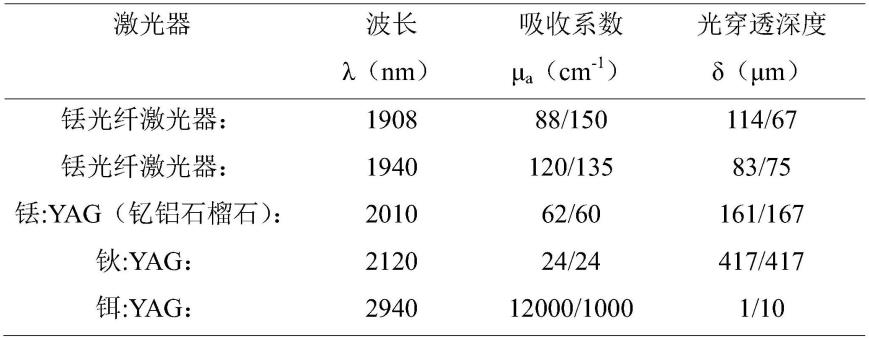
68.各种商业上可获得的医疗级激光系统可以适用于第一激光源106。例如,可以使用半导体激光器,例如在约515纳米和约520纳米或者在约370纳米与约493纳米之间的第一波长范围内提供第一输出110的inxga1-xn半导体激光器。替选地,可以使用红外(ir)激光器,例如以下表1中总结的那些。
69.表1适用于第一激光源106的ir激光器的示例列表
[0070][0071]
参照图1,本公开内容的激光治疗系统可以可选地包括第二激光系统104。如先前所提到的,第二激光系统104包括用于提供第二输出120的第二激光源116,以及关联部件例如电力供应装置、显示器、冷却系统等。第二激光系统104可以与第一激光源106可操作地分离,或者在替选方案中,第二激光系统104可以可操作地耦合至第一激光源106。在一些示例中,第二激光系统104可以包括第二光纤118(与第一光纤108分离),该第二光纤118可操作地耦合至第二激光源116以传输第二输出120。替选地,第一光纤108可以被配置成传输第一输出110和第二输出120两者。
[0072]
在某些方面,第二输出120可以在与第一波长范围不同的第二波长范围上延伸。因此,在第一波长范围与第二波长范围之间可能没有任何交叠。替选地,第一波长范围和第二波长范围可以彼此具有至少部分交叠。根据本公开内容的一些方面,第二波长范围可能不对应于目标组织122的部分吸收光谱,其中入射辐射被先前未被消融或碳化的组织强烈吸收(例如,如图2所示)。在一些这样的方面,第二输出120可以有利地不消融未碳化组织。此外,在另一示例中,第二输出120可以消融先前已经被消融的碳化组织。在附加的示例中,第二输出120可以提供附加的治疗效果。例如,第二输出120可能更适合于凝结组织或血管。
[0073]
激光发射可以被软组织或硬组织、石块等高度吸收。通过示例的方式,图3a至图3c示出了不同组织类型的吸收光谱。图3a分别示出了正常组织(消融前)311和碳化组织(消融后)312的吸收光谱。图3b示出了在某个波长范围内(例如,450nm至850nm),吸收光谱随激光波长呈指数衰减。(图3a和图3b中示出的数据的来源:http://omlc.org/spectra/hemoglobin/)。图3c示出了在不同介质中测量的光学吸收光谱,包括针对水的光谱331a至331c(分别在75%、100%和4%浓度处)、针对血红蛋白(hb)的光谱332、针对氧合血红蛋白(hbo2)的光谱333以及针对黑色素的光谱334a至334d(对于黑色素体的体积分数分别为2%、13%、30%和100%)。(图3c中示出的数据的来源,http://www.americanlaserstudyclub.org/laser-surgery-education/)。针对水吸收的波长在1900nm至3000nm的范围内。针对氧合血红蛋白和/或氧合血红蛋白的波长在400nm至520nm的范围内。尽管许多手术激光在水或血红蛋白中被高度吸收,但在一个范围内,用于吸收水的介质存在限制,这可能是内窥镜的内部变得可能被激光能量损坏的原因。
[0074]
图4示出了诸如第二输出120的激光输出的穿透深度。(图4中示出的数据的来源:http://www.americanlaserstudyclub.org/laser-surgery-education/)。如其中所见,由于与小毛细管的特征尺寸(例如,在约5μm与约10μm之间)相当的穿透深度,第二输出120可以适用于有效凝结。此外,在某些示例中,参照图3a和图3b,第二波长范围可以对应于由未
被碳化的组织对第二输出120的低吸收,但是由已经被碳化的组织的高吸收(例如,通过第一输出110的消融)。明显地,第二输出120的光谱特征对应于由碳化组织对入射的第二输出120的高(例如,大于约250cm-1
)吸收。合适的第二激光源的示例包括具有在约750纳米与约850纳米之间的第二波长范围内的第二输出120的ga
x
al
1-x
as,或者具有在约904纳米与约1065纳米之间的第二波长范围内的第二输出120的in
x
ga
1-x
as。
[0075]
虽然上面描述了具有适合于由组织(正常和/或碳化)吸收的部分交叠光谱的两个激光系统,但是在替选示例中,代替第二激光系统104,第一激光系统102可以提供第二输出120。在示例中,第一激光系统102可以提供第一波长范围内的第一输出110以及第二波长范围内的第二输出120,第一波长范围适合于由先前未被消融的“正常”组织的高吸收(例如,如图2所示),第二波长范围对应于由在被碳化之前的组织的低吸收,以及/或者更适合于凝结(例如,如图3a和图3b中所示)。第一激光系统102可以在附加的波长范围内提供附加的输出。
[0076]
再次参照图1。根据示例,激光治疗系统包括激光反馈控制系统100。现在参照图5,如前所述,激光反馈控制系统100可以分析来自目标组织122的反馈信号130并且控制第一激光系统102和/或第二激光系统104以产生合适的激光输出来提供期望的治疗效果。例如,激光反馈控制系统100可以在治疗过程(例如,消融)期间监测目标组织122的特性,以确定在另一治疗过程(例如,血管的凝结)之前组织是否被适当地消融。因此,激光反馈控制系统100可以包括反馈分析器140。
[0077]
继续参照图5,根据一个示例,反馈分析器140可以监测组织的光谱学特性。光谱学特性可以包括例如反射率、吸收指数等的特征。因此,反馈分析器140可以包括光谱学传感器142。光谱学传感器142可以包括傅里叶变换红外光谱仪(ftir)、拉曼光谱仪、uv-vis反射光谱仪、荧光光谱仪等。ftir是用于常规、简单和快速材料分析的方法。该技术具有相对较好的空间分辨率并且提供关于材料的化学成分的信息。拉曼光谱学在识别硬组织成分和软组织成分方面具有良好的准确性。作为高空间分辨率技术,它针对确定目标内的成分分布也是有用的。uv-vis反射光谱学是从对象反射出的光中收集信息的方法,该信息类似于从眼睛或由高分辨率摄像装置拍摄的彩色图像中产生的信息,但是更加定量化和并且更加客观化。反射光谱学提供关于材料的信息,这是因为光反射和吸收取决于其化学成分和表面特性。使用这种技术也可以获得关于样品的表面和体积特性两者的独特信息。反射光谱学可以是识别硬组织或软组织的成分的有价值的技术。荧光光谱学是一种分析来自样品的荧光的电磁光谱学。它涉及使用光束通常是紫外线,它通常在可见光或ir区域中激发材料化合物并且引起材料化合物发光。该方法适用于对一些有机成分例如硬组织和软组织的分析。
[0078]
在示例中,反馈分析器140可以可选地包括成像传感器144(例如,对紫外(uv)、可见(vis)或红外(ir)波长敏感的ccd或cmos摄像装置)。在一些示例中,光谱学传感器142可以包括本文中列出的多于单个类型的光谱仪或成像摄像装置,以增强对各种特征(例如,碳化组织和非碳化组织、脉管系统等)的感测和检测。
[0079]
在一些示例中,光谱学传感器142(也被称为光谱仪)可以包括本文中列出的任何光谱仪,并且可以附加地依赖于在治疗过程期间使用的内窥镜的成像能力。例如,内窥镜可以用于在治疗过程(例如,肿瘤的激光消融)期间使解剖特征可视化。在这样的情况下,内窥
镜的成像能力可以通过光谱学传感器142来增强。例如,常规的内窥镜可以提供适合于增强解剖特征(例如,病变、肿瘤、脉管系统等)的可视化的窄带成像。通过将光谱学传感器142与内窥镜成像(白光和/或窄带成像)结合,可以增加对组织特性例如碳化水平的检测,以精确控制治疗处理的传送。
[0080]
再次参照图5,光谱学传感器142可以操作地耦合至信号检测光纤150。在这样的示例中,信号检测光纤150可以具有适合于将光谱学信号从组织传输至光谱学传感器142的光学特性。替选地,光谱学传感器142可以操作地耦合至第一激光系统102的第一光纤108和/或第二激光系统104的第二光纤118,并且从而经由第一光纤108和/或第二光纤118检测光谱学信号。
[0081]
继续参照图1和图5,激光反馈控制系统100包括激光控制器160,激光控制器160与光谱学传感器142、第一激光系统102以及可选的第二激光系统104中的每一个可操作地通信。激光控制器160可以根据本文中描述的一个或更多个控制算法来控制可操作地连接至其的一个或更多个激光系统(例如,第一激光系统102、第二激光系统104和/或任何附加激光系统),以控制来自一个或更多个激光系统的激光输出,从而产生目标组织122中的期望治疗效果。
[0082]
激光控制器160可以包括处理器,例如微处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或任何其他等效的集成或分立逻辑电路、以及用于执行归因于激光控制器160的一个或更多个功能的这些部件的任何组合。可选地,激光控制器160可以通过有线或无线连接耦合至光谱学传感器142和一个或更多个激光系统(例如,第一激光系统102、第二激光系统104和本文中未示出的可选的激光系统)。
[0083]
激光控制器160可以(例如,通过有线或无线连接)与反馈分析器140通信以从反馈分析器140接收一个或更多个反馈信号。激光控制器160可以基于反馈信号来确定目标组织122的一个或更多个特性,如将在本文中进一步描述的。例如,激光控制器160可以比较反馈信号的幅度以呈现最小幅度和最大幅度,并且确定组织的特性(例如,碳化、凝结等)。
[0084]
在一些示例中,反馈分析器140可以连续地监测目标组织122并且连续地与激光控制器160通信以提供反馈信号。因此,激光控制器160可以继续将激光系统保持在一个或更多个状态,直到检测到反馈信号的幅度变化为止。当检测到光谱学信号的幅度变化时,激光控制器160可以与一个或更多个激光系统通信并且改变它们的状态以提供期望的治疗效果。替选地或另外,激光控制器160可以与操作者(例如,医疗保健专业人员)通信,并且经由指示反馈信号的一个或更多个输出系统显示一个或更多个输出,并且可以可选地指示操作者利用第一激光系统和/或第二激光系统执行一个或更多个治疗过程以提供期望的治疗效果。
[0085]
在本文中描述的说明性示例中,激光控制器160可以通过改变激光系统的状态来控制一个或更多个激光系统。根据一个方面,激光控制器160可以独立控制每个激光系统。例如,激光控制器160可以向每个激光系统发送不同的控制信号,以独立于其他激光系统控制每个激光系统。替选地,激光控制器160可以发送公共信号来控制一个或更多个激光系统。
[0086]
在一些示例中,激光系统中的每一个可以与两个不同的状态关联:其中激光系统产生激光输出的第一状态,以及激光系统不产生激光输出的第二状态。例如,第一激光系统
102可以具有产生第一输出110(例如,在第一波长范围内)的第一状态和不产生第一输出110的第二状态。类似地,第二激光系统104可以具有产生第二输出120(例如,在第二波长范围内)的第一状态和不产生第二输出120的第二状态。在这样的示例中,激光控制器160可以通过发送将激光系统的状态从第一状态改变为第二状态或从第二状态改变为第一状态的控制信号来控制一个或更多个激光系统。此外,可选地,每个激光系统可以具有附加状态,例如产生不同波长范围内的激光输出的第三状态。因此,由激光控制器160可以将附加控制信号发送至激光系统以将它们的状态从它们的当前状态改变为一个或更多个附加状态(例如,第一状态至第三状态、第二状态至第三状态、第三状态至第一状态、以及第三状态至第二状态)以产生提供期望治疗效果的激光输出。
[0087]
示例激光系统控制算法
[0088]
图6和图7是示出根据如本公开内容中描述的一些示例用于使用激光反馈控制系统100来控制一个或更多个激光系统的算法的示例的流程图。根据如图6所示的控制算法600,在步骤602处,由反馈分析器140(例如,光谱学传感器142或成像传感器144)可以检测第一信号(例如,光谱学信号)。在步骤604处,激光控制器160可以接收来自反馈分析器140的第一信号。第一信号可以对应于第一特性。在步骤606处,激光控制器160可以确定第一信号是否总体上等于第一预设值。例如,激光控制器160可以将第一信号的幅度与目标值或预设极值(例如,最大幅度或最小幅度)进行比较,并且确定目标组织122的第一特性。第一特性可以指示接受治疗处理(例如,消融或碳化组织)后的组织特征。激光控制器160可以基于第一特性(第一信号与第一预设值之间的比较)确定已经获得了期望的治疗效果,并且可以在步骤608处向第一激光系统102发送第一控制信号以从第一激光系统102的第一状态改变为第一激光系统102的第二状态。根据示例,这可能导致第一激光系统102不再产生第一输出110,从而提供令人满意的治疗效果(例如,消融)。替选地,如果在步骤606处,确定第一信号总体上不等于第一预设(没有充分消融),则激光控制器可以不发送任何控制信号,并且反馈分析器可以继续监测第一信号。
[0089]
可选地,在步骤612处,反馈分析器140可以接收与第一信号不同的第二信号。第二信号可以指示具有第二预设值的目标组织的第一特性。例如,来自组织的反射光的幅度在第二信号中可能与在第一信号中不同。在可选步骤614处,由激光控制器160可以接收第二信号。在可选步骤616处,激光控制器160可以确定第二信号是否总体上等于第二预设。例如,第二信号(例如,光谱学信号或图像)可以指示目标组织122没有被第一输出110的吸收碳化(例如,测量的信号幅度小于消融组织的光谱学信号或图像的预设最大幅度)。在一些情况下,这样的状况可能指示不充分的消融或其他不令人满意的治疗效果,并且可能期望继续传送激光输出使得可以消融组织。因此,在可选步骤618处,激光控制器160可以与第一激光系统102通信以发送第二控制信号。第二控制系统可以将第一激光系统102保持在第一状态(例如,继续传送第一输出110)。替选地,如果第一激光系统处于第二状态(例如,关),则在可选步骤620处,第二控制信号可以将第一激光系统的状态改变为第一状态(例如,开),例如以继续向目标组织传送附加的消融。
[0090]
在可选步骤620处,在激光控制器160确定治疗条件的令人满意的传送之后,激光控制器160可以执行附加的控制操作来传送附加的激光输出(例如,在不同的波长)以传送附加的治疗效果。
[0091]
图7示出了用于控制双激光系统的控制算法。算法700可以适用于激光控制器160与两个或更多个激光系统操作通信的情况。在一些这样的示例中,第一激光系统102可以被配置成用于传送第一输出110(例如,在第一波长范围内),并且第二激光系统104可以被配置成用于传送第二输出120(例如,在不同于第一波长范围的第二波长范围内),如先前所描述的。控制算法700可以控制第一激光系统102、第二激光系统104以及可选的附加激光系统。
[0092]
根据控制算法700,在步骤702处,由反馈分析器140可以检测第一信号(例如,光谱学信号或图像)。在步骤704处,激光控制器160可以接收来自反馈分析器140的第一信号。在步骤706处,激光控制器160可以确定第一信号是否总体上等于第一预设值(例如在第一预设的指定公差容限内)。例如,激光控制器160可以将第一信号的幅度与目标值或预设极值(例如,最大幅度或最小幅度)进行比较,并且确定目标组织122的第一特性。第一特性可以指示在接受治疗处理(例如,消融或碳化组织)后的组织特征。激光控制器160可以基于满足目标值或预设标准的第一特性来确定已经获得期望的治疗效果,并且可以在步骤708处向第一激光系统102发送第一控制信号以从第一激光系统102的第一状态改变为第一激光系统102的第二状态。例如,激光控制器160可以基于来自消融组织的反射光确定消融已经令人满意,并且向第一激光系统发送第一控制信号以将第一激光系统转变为关状态。替选地,在说明性示例中,激光控制器160可以向操作者(例如,医疗保健专业人员)提供输出以指示已经达到期望的治疗效果,以及/或者向操作者指示以将第一激光系统的状态改变为“关”状态。
[0093]
在步骤708处,激光控制器160还可以向第二激光系统104发送第四信号以从第二激光系统104的第二状态改变为第二激光系统104的第一状态。例如,第二激光系统104可能更适合消融碳化组织。因此,在检测到组织已经被充分碳化时(例如,在步骤708处),在一些情况下,激光控制器160可以发送第一控制信号以关闭第一激光系统102,并且发送第四控制信号以打开第二激光系统104。图8中示出了第一激光系统和第二激光系统的状态的示例时序图。
[0094]
在一些示例中,可以同时发送第一控制信号和第四控制信号。替选地,可以依次发送第一控制信号和第四控制信号。
[0095]
返回至图7,在可选步骤710处,反馈分析器140可以检测不同于第一信号的第二信号(例如,光谱学信号或图像)。例如,第二信号可以指示目标组织122没有被第一输出110的吸收碳化(例如,测量的信号幅度大于消融组织的光谱学信号的预设最大幅度)。在一些情况下,这样的状况可能指示不充分的消融或其他不令人满意的治疗效果,并且可能期望继续传送激光输出使得可以消融组织。在可选步骤712处,激光控制器可以接收第二信号,并且在可选步骤714处,将第二信号与第二预设值进行比较。如果第二信号总体上等于第二预设值(例如在第二预设的指定公差容限内),则在可选步骤716处,激光控制器160可以将第二控制信号发送至第一激光系统并且将第三控制信号发送至第二激光系统。图8中示出了第一激光系统和第二激光系统的状态的示例时序图。
[0096]
在一些示例中,第二控制信号可以将第一激光系统从第二状态(例如,关)改变为第一状态(例如,开)。替选地,如果第一激光系统处于第一状态(例如,开),则第二控制信号可以将第一激光系统102保持在第一状态(例如,以继续传送第一输出110)。可选地,在步骤
716处,如果第二激光系统104处于其第一状态,则激光控制器160可以将第三控制信号发送至第二激光系统104,从而将第二激光系统104从第二激光系统104的第一状态(例如,开)改变为第二激光系统104的第二状态(例如,关)。替选地,如果第二激光系统处于第二状态,则第三控制信号可以将第二激光系统104保持在第二状态(例如,关)。
[0097]
根据一些示例,第一激光系统102和第二激光系统104中的每一个的第一状态可以分别对应于由第一激光源106产生第一输出110和由第二激光源116产生第二输出120。因此,第一激光系统102和第二激光系统104中的每一个的第一状态可以表示“开”状态。在一些这样的示例中,第一激光系统102和第二激光系统104中的每一个的第二状态可以对应于“关”状态。
[0098]
参照图5,激光反馈控制系统100可以包括一个或更多个输出系统170。一个或更多个输出系统170可以与用户和/或其他系统通信,以及/或者将信号传送给用户和/或其他系统例如用于治疗处理的冲洗抽吸/泵送系统、或光学显示控制器、或其他系统。在一些示例中,输出系统170可以包括显示器172。显示器172可以是屏幕(例如,触摸屏),或者在替选方案中,可以简单地为视觉指示器(例如,一个或更多个颜色的led灯)。在附加的示例中,输出系统170可以包括能够提供听觉信号的听觉输出系统174(例如,扬声器、警报系统等)。输出系统170可以提供一个或更多个输出(例如,第一颜色的led灯、屏幕上的第一消息、第一音调的警报声音)以指示已经实现了期望的治疗效果。可以例如在步骤610处并且可选地在步骤620处提供输出。在进一步的可选示例中,当没有实现期望的治疗效果时,输出系统170可以提供一个或更多个不同的输出。例如,输出系统170可以提供一个或更多个输出(例如,第二颜色的led灯、屏幕上的第二消息、第二音调的警报声音)以指示没有实现期望的治疗效果。这样的输出可以提示操作者(医疗保健专业人员)采取一个或更多个步骤(例如,使用一个或更多个激光系统执行附加的处理步骤以提供附加的激光输出)。
[0099]
图8示出了根据通过使用两个光波长传送组织消融和凝结的示例的具有激光反馈控制系统100的双激光系统的时序图。然而,如先前所描述的,激光反馈控制系统100可以与单个或多个光波长系统一起使用,以优化针对目标组织122的激光治疗或其他类型的治疗效果的传送。治疗效果可以以任何顺序传送,包括同时传送。替选地,可以在不同的时间传送治疗效果。
[0100]
根据示例,来自第一激光系统102和第二激光系统104的激光能量可以被传送至目标(例如,组织表面),例如在示例中可以被连续地传送至目标。第一激光系统和第二激光系统可以经由相同的光纤传送各自的激光能量。替选地,第一激光系统和第二激光系统可以经由各自不同的光纤传送各自的激光能量。具有幅度a
max
的光反馈信号810从组织表面反射并且可以被反馈分析器140检测和分析。第一激光系统和第二激光系统可以交替它们各自的操作状态(例如,开状态或关状态)。如图8所示,第一激光系统102可以切换至其第一状态,或者保持在其第一状态(例如,开)820a,而第二激光系统104可以切换至第二状态或保持在第二状态(例如,关)。第一激光可以用于消融和碳化组织。在第一激光系统102的操作期间,第一信号可以由激光控制器160接收,并且可以指示由组织的高吸收,直到其幅度减小至阈值水平a
min
为止。来自第一激光系统102的输出的波长可以在目标的吸收光谱中的第一波长范围内,例如适合于目标组织的有效碳化的波长。组织对激光能量具有高的吸收。在示例中,第一激光输出在uv-vis或深红外波长范围内。
[0101]
然后,激光控制器160可以改变激光系统的状态,使得第一激光系统102处于第二状态(例如,关),并且第二激光系统104处于第一状态(例如,开)830a。来自第二激光系统104的输出可以被碳化组织高度吸收,使得碳化组织被消融,有效地去除碳化。来自第二激光系统104的输出的波长可以在目标的吸收光谱中的第二波长范围内。第二波长范围可以不同于来自第一激光系统102的输出的第一波长范围。来自第二激光系统104的输出的波长也可以适合于有效凝结。在示例中,第二激光输出在红外波长范围(例如,100μm至300μm)内。由于脱碳过程,信号(例如,第二信号)的幅度返回接近初始水平a
max
。激光控制器160可以相应地改变激光的状态,使得第一激光系统102处于第一状态(例如,开),并且第二激光系统104处于第二状态(例如,关)。可以重复该过程,使得以如图8所示的交替方式将第一激光系统102和第二激光系统104分别重复切换至它们的开状态820b和830b,直到实现期望的组织消融和/或凝结为止。在一些示例中,可以将如在本文中讨论的光反馈信号810提供给电手术系统,该电手术系统可以可控地调整和优化不同于激光能量的电手术能量。
[0102]
具有目标识别的示例内窥镜系统
[0103]
图9至图11展示了如何可以完全在内窥镜内执行目标成分分析。可以通过激光光纤和数字内窥镜的远端上的潜在的摄像装置经由光谱学来执行目标成分分析。
[0104]
图9a至图9b示出了插入有激光光纤的内窥镜的示例。示例性内窥镜910的细长主体部分包含包括激光光纤912、照明源914和摄像装置916的各种部件。激光光纤912是激光系统102或激光系统202的光学路径108的示例。激光光纤912可以沿内窥镜910的细长主体内的工作通道913延伸。在一些示例中,激光光纤912可以与内窥镜分离。例如,激光光纤912可以在使用之前沿内窥镜的工作通道被馈送,并且在使用之后从内窥镜的工作通道被取回。
[0105]
照明源914可以是允许操作者可视化目标结构(例如,组织或结石结构)的可视化系统的一部分。照明源的示例可以包括一个或更多个led,该一个或更多个led被配置成远离内窥镜的细长主体的远端远侧地发射光以照明目标结构的区域。在示例中,照明源914可以发射白光来照明目标结构。白光可以使从业者观察到结石或内窥镜主体的远端附近组织上的变色或其他基于颜色的影响。在示例中,照明源914可以发射蓝光以照明目标结构。蓝光可以非常适合显示热组织扩散,并且从而检测组织中的损伤。也可以使用其他颜色和/或色带,例如红色、琥珀色、黄色、绿色或其他。
[0106]
摄像装置916是可视化系统的一部分。摄像装置916是成像传感器244的示例。摄像装置916可以捕获被照明的目标结构和周围环境的视频图像或一个或更多个静态图像。视频图像可以是实时的,或者具有相对较短的处理延迟的几乎是实时的,使得在从业者操纵内窥镜时,从业者可以观察到目标结构。摄像装置916可以包括透镜和位于透镜的焦平面处的多像素传感器。传感器可以是颜色传感器,例如为视频图像中的每个像素提供红光、绿光和蓝光的强度值的传感器。电路板可以产生表示所捕获的照明结石的视频图像的数字视频信号。数字视频信号可以具有10hz、20hz、24hz、25hz、30hz、40hz、50hz、60hz的视频刷新率或另外合适的视频刷新率。
[0107]
图10a至图10b示出了反馈控制的激光治疗系统的示例。在图10a中,激光治疗系统1000a包括与接收摄像装置反馈的反馈控制的激光治疗系统1010集成的内窥镜910。作为激光治疗系统100的示例的激光治疗系统1000a包括内窥镜910、反馈控制的激光治疗系统
1010、激光源1020和光源1030。在各种示例中,反馈控制的激光治疗系统1010的一部分或全部可以被嵌入至内窥镜910中。
[0108]
作为激光反馈控制系统200的示例的反馈控制的激光治疗系统1010包括光谱仪1011(光谱学传感器242的示例)、反馈分析器1012(反馈分析器240的至少一部分的示例)和激光控制器1013(激光控制器260的示例)。激光源1020是激光系统202的示例,并且该激光源1020可以耦合至激光光纤912。光纤集成激光系统可以用于内窥镜手术,这是因为它们能够将激光能量传递通过柔性内窥镜并且有效地治疗硬组织和软组织。这些激光系统在从uv至ir区域(200nm至10000nm)的宽波长范围内产生激光输出光束。一些光纤集成激光器在被软组织或硬组织高度吸收的波长范围内产生输出,例如1900nm至3000nm用于水吸收或者400nm至520nm用于氧合血红蛋白吸收和/或脱氧血红蛋白吸收。上面的表1是在1900nm至3000nm高水吸收范围内发射的ir激光的总结。
[0109]
一些光纤集成激光器在被目标软组织或硬组织吸收最少的波长范围内产生输出。由于穿透深度与小毛细管的直径(5μm至10μm)相似,这些类型的激光提供有效的组织凝结。激光源1020的示例可以包括发射uv-vis的in
x
ga
1-x
n半导体激光器,例如其中发射515nm至520nm的gan激光器、其中发射370nm至493nm的in
x
ga
1-x
n激光器、其中发射750nm至850nm的ga
x
al
1-x
as激光器或其中发射904nm至1065nm的in
x
ga
1-x
as激光器等。
[0110]
光源1030可以产生电磁辐射信号,该电磁辐射信号可以经由沿内窥镜的细长主体延伸的第一光学路径传输至目标结构122。第一光学路径可以位于工作通道913内。在示例中,第一光学路径可以是与激光光纤912分离的光纤。在另一示例中,如图10a所示,可以通过用于传输激光束的同一激光光纤912传输电磁辐射信号。电磁辐射离开第一光学路径的远端并且投射至目标结构和周围环境。如图10a所示,目标结构在内窥镜摄像装置916的视野内,使得响应于投射至目标结构和周围环境的电磁辐射,内窥镜摄像装置916例如ccd或cmos摄像装置可以收集从目标结构122反射的信号,产生目标结构的成像信号1050,并且将成像信号传送至反馈控制的激光治疗系统1010。在一些示例中,除了ccd或cmos摄像装置之外的成像系统,例如激光扫描可以用于收集光谱学响应。
[0111]
除了通过摄像装置系统916产生和传输的反馈信号(例如,成像信号)之外或者代替反馈信号(例如,成像信号),在一些示例中,从目标结构反射的信号可以附加地或替选地被收集并且通过单独的光纤通道或诸如与内窥镜910关联的激光光纤传输至反馈控制的激光治疗系统1010。图10b示出了激光治疗系统1000b的示例,该激光治疗系统1000b包括与反馈控制的激光治疗系统1010集成的内窥镜910,该反馈控制的激光治疗系统1010被配置成接收光谱学传感器反馈。反射的光谱学信号1070(其是图1和图2的反馈信号130的示例)可以通过用于将来自光源1030的电磁辐射传输至目标结构的相同的光学路径(例如激光光纤912)行进回至反馈控制的激光治疗系统1010。在另一示例中,反射的光谱学信号1070可以通过第二光学路径行进至反馈控制的激光治疗系统1010,第二光学路径例如是与将来自光源1030的电磁辐射传输至目标结构的第一光纤单独的光纤通道。
[0112]
反馈控制的激光治疗系统1010可以分析一个或更多个反馈信号(例如,目标结构的成像信号1050或反射的光谱学信号1070)以确定激光源1020的操作状态。光谱仪1011可以产生来自一个或更多个反馈信号的一个或更多个光谱学特性,例如通过使用ftir光谱仪、拉曼光谱仪、uv-vis光谱仪、uv-vis-ir光谱仪或荧光光谱仪中的一个或更多个,如以上
参考光谱学传感器242所讨论的。反馈分析器1012可以被配置成例如通过使用目标检测器246或目标分类器248中的一个或更多个来将目标结构识别或分类为多个结构类别或结构类型之一。激光控制器1013可以被配置成确定激光系统1020的操作模式,如以上参照图2类似地讨论的。
[0113]
光源1030可以产生从uv至ir的光学范围内的电磁辐射。下面的表2呈现了适用于本文中讨论的示例的针对光谱学系统的光源1030的示例。
[0114]
表2:针对光谱学系统的光源
[0115][0116]
在一些示例中,反馈分析器1012可以确定激光光纤912的远端与目标结构122之间的距离1060,或者用于接收反射信号并且将反射信号传输回至光谱仪1011的光学路径的远端与目标结构122之间的距离1060(如图10a所示)。距离1060可以使用光谱学特性例如由光谱仪1011产生的反射光谱来计算。如果距离1060满足条件,例如降到阈值(d
th
)以下或在指定的激光发射范围内,则激光控制器1013可以控制激光源1020向目标结构122传送激光能量。在示例中,如果目标结构122被识别为预期的治疗结构类型(例如,指定的软组织类型或指定的结石类型),但是目标结构122不在激光的范围内(例如d》d
th
),则激光控制器1013可以产生控制信号以“锁定”激光源1020(即,防止激光源1020发射)。关于距离1060的信息和目标结构在激光范围之外(d》d
th
)的指示可以被呈现给从业者,从业者然后可以调整内窥镜910,例如将激光光纤912的远端重新定位成移动至更接近目标。距离1060以及目标结构类型可以被连续监测和确定并且呈现给从业者。当目标被识别为预期的治疗结构类型并且在激光的范围内(d《=d
th
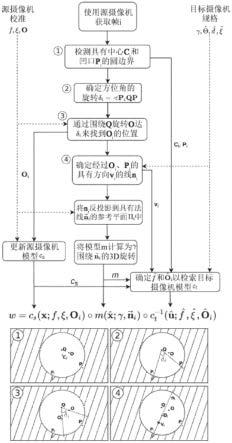
)时,激光控制器1013可以产生控制信号以“解锁”激光源1020,并且激光源1020可以根据激光操作模式(例如,功率设置)靶向并发射在目标结构122处。下面讨论了用于根据光谱学数据计算距离1060的方法的示例,例如参照图24a和图24d。
[0117]
在一些示例中,光谱仪1011可以被配置成进一步使用关于被配置成将电磁辐射从
光源传输至目标的光学路径的几何形状和定位的信息来产生光谱学特性(例如,反射光谱)。例如,激光光纤912的外直径或用于将从目标反射的光谱学信号传输至光谱仪1011的分离光学路径的外直径,或者所述光纤或路径从内窥镜910突出的角度可以影响反射信号的强度。可以测量外直径和/或突出角度并且将其提供给光谱仪1011以获得反射光谱数据。如以上所讨论的,目标结构与光纤的远端之间的距离1060可以使用光谱数据、测量的光纤或光学路径的外直径及其突出角度和/或来自内窥镜图像处理器的输入信号来计算。
[0118]
图11a至图11b是示出用于使用诊断光束识别目标的内窥镜系统的示例的图。如图11a所示,内窥镜系统1100a可以包括内窥镜1110和可以通过内窥镜1110的工作通道1112插入的光纤1120a。内窥镜1110可以包括至少一个内窥镜照明源1130,或者以其他方式经由内窥镜端口1114耦合至至少一个内窥镜照明源1130。至少一个内窥镜照明源1130可以可控地提供不同的照明量。在通过工作通道1112插入光纤1120a时,光纤1120a可以例如经由内窥镜端口1114耦合至非内窥镜照明源1140。非内窥镜照明源1140可以不同于至少一个内窥镜照明源1130。非内窥镜照明源1140可以通过光纤1120a发射诊断光束1142并且接近内窥镜1110的远端1116。光纤1120a可以将诊断光束1142引导在目标1001处。在示例中,非内窥镜照明源1140可以是被配置成发出包括激光束的诊断束的激光源。在各种示例中,白光灯、led光源或荧光透视光源可以通过内窥镜的工作通道插入或者通过诸如腹腔镜端口的另一端口插入。
[0119]
内窥镜系统1100a可以包括控制器1150。控制器1150可以以不同的操作模式可控地操作至少一个内窥镜照明源1130,不同的操作模式包括例如具有第一照明量的第一模式和具有低于第一照明量的第二照明量的第二模式。在示例中,控制器1150可以响应于触发信号产生这样的控制信号以改变照明模式(例如,从第一模式改变至第二模式)。在示例中,内窥镜包括可以拍摄目标1001的图像的成像系统1160,并且控制器1150可以响应于目标图像的亮度或强度的变化而向内窥镜产生控制信号以改变照明模式(例如,从第一模式至第二模式)。在下文中将第一模式称为高照明模式,并且在下文中将第二模式称为低照明模式。在示例中,高照明模式和低照明模式可以由各自不同的内窥镜照明源提供,不同的内窥镜照明源例如为被配置成在高照明模式下发射照明光的第一内窥镜照明源和被配置成在低照明模式下发射照明光的不同的第二内窥镜照明源。照明光可以在内窥镜1110的远端1116附近发射。在示例中,照明光可以行进通过工作通道1112内的不同于光纤1120a的光学路径。光学路径可以将照明光1132引导在其上投射诊断光束的同一目标1001处。
[0120]
当至少一个内窥镜照明源1130从高照明模式改变为低照明模式时,控制器1150可以向非内窥镜照明源1140产生控制信号以发射诊断光束1142(例如,具有低于治疗能量水平的激光束)。在示例中,低照明模式包括关闭内窥镜的照明。通过在低照明模式下对目标部位处的照明进行调光,可以增强入射在目标上的诊断光束从目标的反射,这可以有助于改善目标识别。
[0121]
在一些示例中,在照明模式处于第二模式时,控制器1150可以向显示器产生控制信号以显示目标的图像,其中图像是目标的当前图像的先前图像或修改图像。控制器1150可以基于入射在目标上的诊断光束和从目标反射的来自诊断光束的光来确定目标的成分。在示例中,控制器1150可以确定结石目标的第一部分的第一成分,并且确定结石目标的第二部分的不同的第二成分。基于所识别的目标的不同部分的成分,控制器1150可以对第一
激光设置进行编程,或者产生对第一激光设置进行编程的建议,以靶向结石目标的第一部分。控制器1150还可以对不同于第一激光设置的第二激光设置进行编程,或者产生对第二激光设置进行编程的建议,以靶向结石目标的第二部分。
[0122]
在示例中,在非内窥镜照明源1140已经停止发出诊断光束1142之后,控制器1150可以向内窥镜产生控制信号以将照明模式从低照明模式改变回高照明模式。
[0123]
图11b示出了内窥镜系统1100b的示例,内窥镜系统1100b是内窥镜系统1100a的变型。在该示例中,诊断光束1142可以通过光纤1120b传输。与插入内窥镜1110的工作通道1112的光纤1120a不同,光纤1120b可以与工作通道1112分离设置。在一些示例中,如图11b所示,诊断光束1142可以通过与用于传送内窥镜照明光的内窥镜端口1114分离的次级端口1115例如在示例中的腹腔镜端口传送。光纤1120b可以定位成使得内窥镜1110的远端116和光纤1120b的远端两者都靶向目标1001。
[0124]
图12和图13a至图13b是示出用于经由uv-vis光谱学或uv-vis-ir光谱学识别不同类型的目标例如用于识别若干个不同类型肾结石的成分的反射光谱数据的图。通过将uv-vis光谱仪或uv-vis-ir光谱仪靶向包括草酸钙石块(一水合物)、草酸钙石块(二水合物)、磷酸钙石块、鸟粪石石块和尿酸石块的五种主要类型的肾结石的每个图像来收集反射光谱数据。在示例中,电磁辐射可以包括在10nm与400nm之间的一个或更多个紫外波长。在另一示例中,如图12所示,用于识别不同类型目标的反射光谱可以在200nm至1100nm波长范围内根据光谱仪记录。其中示出了肾结石成分的反射光谱,肾结石成分包括磷酸铵镁(am mag)水合物、草酸钙(ca)一水合物、草酸钙(ca)水合物、磷酸钙(ca)和尿酸。这些石块成分的反射光谱在较低波长范围(例如,低于400nm)比在较高波长范围(例如,高于400)更可辨别。图13a示出了图12中所示的反射光谱在200nm至400nm波长范围内的一部分,包括磷酸铵镁水合物光谱1310、草酸钙一水合物光谱1320、草酸钙水合物光谱1330、磷酸钙光谱1340和尿酸光谱1350。该uv波长范围是可以在石块图像的光谱中识别差异的一个区域。图13b示出了各种肾结石成分在400nm至700nm波长范围内的反射光谱,包括胱氨酸光谱1360、尿酸光谱1370和草酸钙一水合物光谱1380。利用uv-vis光谱学或uv-vis-ir光谱学,可以在不同类型的目标例如不同类型的肾结石之间进行区分。
[0125]
因此,由于uv波长范围在例如区分不同的目标成分例如肾结石方面有前景,因此需要将允许对该区域进行分析的系统内的光源。图14示出了分别覆盖250nm、280nm、310nm和340nm周围的uv波长范围的各个部分的光峰1410、1420、1430和1440。图15将这些光峰1410至1440与来自图13a至图13b的若干个类型的石块的归一化反射光谱交叠。这些光峰1410至1440展示了将允许光谱仪在uv波长中分析目标的成分的潜在的光源。
[0126]
图16a示出了在uv-vis光谱仪上从各种组织类型捕获的归一化反射光谱的示例,包括软骨光谱1610、骨骼光谱1620、肌肉光谱1630、脂肪光谱1640和肝组织光谱1650。图16b示出了在uv-vis光谱仪上从各种软组织和硬组织捕获的归一化反射光谱的另一示例,包括软骨光谱1610、骨骼光谱1620、肌肉光谱1630、脂肪光谱1640、肝组织光谱1650和血管光谱1660。图16a至图16b中所示的反射光谱数据展示了根据可以在内窥镜的工作通道内使用的方法分析目标的成分的可行性。与从石块图像中捕获的光谱类似,uv-vis区域可以用于识别不同类型的目标。图16c示出了典型石块成分的ftir光谱的示例,以及图16d是关于一些软组织和硬组织成分的示例ftir光谱。
[0127]
示例激光治疗系统
[0128]
如本文中所描述的特征可以与用于各种应用的激光系统相关地使用,在各种应用中结合不同类型的激光源可能是有利的。例如,本文中描述的特征可能适用于工业或医疗设置,例如医疗诊断、治疗和手术。
[0129]
如本文中所描述的特征可以与光谱学系统一起使用,该光谱学系统可以与光纤集成激光系统和内窥镜结合使用。
[0130]
图17至图18示出了根据如本公开内容中描述的各种示例的激光治疗系统的示意图。激光治疗系统可以包括被配置成指向目标传送激光能量的激光系统,以及被配置成耦合至激光系统的激光反馈控制系统。激光系统可以包括可以发射从uv至ir的相似或不同的波长的一个或更多个激光模块1710a至1710n(例如,固态激光模块)。选择集成激光模块的数量、其输出功率、发射范围、脉冲形状和脉冲串,以平衡系统成本和向目标传送所期望的效果所需的性能。
[0131]
一个或更多个激光模块1710a至1710n可以与光纤集成,并且被包括在激光耦合系统中。光纤集成激光系统可以用于内窥镜手术,这是因为它们能够将激光能量穿过柔性内窥镜并有效地治疗硬组织和软组织。这些激光系统在从uv至ir区域的宽波长范围(例如,200nm至10000nm)内产生激光输出光束。一些光纤集成激光器在被软组织或硬组织高度吸收的波长范围内产生输出,例如1900nm至3000nm用于水吸收或400nm至520nm用于氧合血红蛋白吸收和/或脱氧血红蛋白吸收。各种ir激光器可以用作内窥镜手术中的激光源,例如上面参照表1描述的那些。
[0132]
激光模块1710a至1710n可以各自都由集成至光纤中的多个固态激光二极管组成,以增加输出功率并且将发射传送至目标。一些光纤集成激光器在被目标软组织或硬组织吸收最少的波长范围内产生输出。由于穿透深度与小毛细管的直径(5μm至10μm)相似,这些类型的激光提供有效的组织凝结。根据本公开内容中的各个示例描述的光纤集成激光模块1710a至1710n具有若干个优点。在示例中,由激光模块发射的光具有对称的光束质量、圆形且平滑(均匀)的强度分布。紧凑的冷却装置集成至激光模块中,并且使整个系统紧凑。光纤集成激光模块1710a至1710n可以容易地与另外的光纤光学部件组合。附加地,光纤集成激光模块1710a至1710n支持允许模块无需对准即可与大多数光学模块一起良好操作的标准光纤连接器。此外,光纤集成激光模块1710a至1710n可以在不改变激光耦合系统的对准的情况下被容易地替换。
[0133]
在一些示例中,激光模块可以在被诸如软组织或硬组织、石块、骨骼、牙齿等的一些材料高度吸收的波长范围内产生激光输出,例如1900nm至3000nm用于水吸收或400nm至520nm用于氧合血红蛋白和/或脱氧血红蛋白吸收,如图3c所示。在一些示例中,激光模块可以在被目标例如软组织或硬组织、石块、骨骼、牙齿等低吸收的波长范围内产生激光输出。这种类型的激光提供更有效的组织凝结,这是因为穿透深度与小毛细管的直径(例如,5μm至10μm)相似,如图3c所示。市售固态激光器是用于激光模块的潜在发射源。用于激光模块的激光源的示例可以包括发射uv-vis的in
x
ga
1-x
n半导体激光器,例如gan(发射515nm至520nm)或in
x
ga
1-x
n(发射370nm至493nm)、gaxal1-xas激光器(发射750nm至850nm)或inxga1-xas激光器(发射904nm至1065nm)。这种激光源也可以应用于组织凝结应用。
[0134]
激光反馈控制系统可以包括一个或更多个子系统,该一个或更多个子系统包括例
如光谱学系统1720、反馈分析器1730和激光控制器1740。
[0135]
光谱学系统1720
[0136]
光谱学系统1720可以将控制光信号从光源发送至目标例如但不限于结石、软组织或硬组织、结合物或牙齿或工业目标,并且收集从目标反射的光谱响应数据。该响应可以通过单独的光纤、激光光纤或内窥镜系统传送至光谱仪。光谱仪可以将数字光谱数据发送至系统反馈分析器1730。覆盖从uv至ir的光学范围的用于光谱学系统的光源的示例可以包括上面参照表2描述的那些。图20示出了在示例中具有反馈分析器1730的光谱学系统1720的示意图。
[0137]
光学光谱学是可以用于有机材料和无机材料的简单且快速的分析的强大的方法。根据本公开内容中描述的各种示例,光谱学光源可以被集成至单独的光纤通道、激光光纤或内窥镜系统中。从目标反射的光源信号可以被成像系统快速收集并且传送至光谱仪,该成像系统包含诸如可以包括在数字内窥镜中的检测器,例如ccd或cmos传感器。其他成像系统如激光扫描也可以用于收集光谱学响应。光学光谱学具有若干个优点。它可以容易地与光纤激光传送系统1701集成。它是用于检测和分析材料化学成分的无损技术,并且可以实时执行分析。光学光谱学可以用于分析包括例如硬组织和软组织、结石结构等的不同类型的材料。
[0138]
可以单独或组合使用各种光谱学技术来分析目标化学成分并且产生光谱学反馈。这种光谱学技术的示例可以包括uv-vis反射光谱学、荧光光谱学、傅里叶变换红外光谱学(ftir)或拉曼光谱学等。上面的表2呈现了覆盖从uv至ir的光学区域并且适用于示例的用于光谱学系统的光源的示例。钨卤素光源通常用于在可见光和近ir范围内进行光谱学测量。氘光源以其稳定的输出而闻名,并且它们用于uv吸收或反射测量。卤素灯与氘灯的混合产生提供从200nm至2500nm的平滑光谱的宽光谱范围光源。氙光源用于其中需要长寿命和高输出功率的应用,例如用于荧光测量。led和激光二极管光源以精确的波长提供高功率;它们具有长寿命、短预热时间和高稳定性。光谱学光源可以集成至单独的光纤通道、激光光纤或内窥镜系统中。从目标反射的光源信号可以被快速检测并且通过单独的光纤通道或激光光纤传送至光谱仪。
[0139]
反馈分析器1730
[0140]
反馈分析器1730可以接收包括来自光谱仪的光谱学响应数据的来自各种来源的输入,以建议或直接调整激光系统操作参数。在示例中,反馈分析器1730可以将光谱学响应数据与目标成分数据的可用数据库档案库进行比较。基于光谱学系统反馈,信号分析器检测目标材料成分,并且建议激光操作模式(也被称为激光设置)例如针对至少一个激光模块的操作参数,以实现对识别的组织成分的有效组织治疗。操作参数的示例可以包括至少一个激光波长、脉冲或连续波(cw)发射模式、峰值脉冲功率、脉冲能量、脉冲速率、脉冲形状、以及来自至少一个激光模块的脉冲的同时或顺序发射。尽管没有明确描述,但是顺序脉冲包括组合以传送所选择的脉冲能量的脉冲串。如本文中所描述的脉冲通常是指从激光模块开始激光发射与停止激光发射之间的时间。只要保持所选择的平均激光功率,在每个脉冲期间激光能量的强度可以变化以具有递增或递减斜坡或正弦曲线分布的形状,或者单独的或与脉冲序列组合的任何其他形状。例如,如果仅存在一个脉冲,则具有脉冲能量为1j的2w平均功率设置发生在2hz的频率处。然而,能量也可以被传送为以2hz的速率发生的快速连
续的两个0.5j脉冲。这些脉冲中的每一个都可能具有相似的脉冲形状或不同的脉冲形状。反馈分析器1730利用算法和输入数据来直接调整或建议激光操作参数,例如上面示例中描述的那些。
[0141]
在一些示例中,反馈分析器1730可以基于专门开发的算法利用输入数据来计算和控制激光传送系统1701(光纤)的远端与目标之间的距离。在移动目标(例如,结石)的情况下,反馈分析器1730可以调整或建议使用水中的蒸汽气泡来产生抽吸效应的激光操作参数,以将超过预定阈值的目标拉到更靠近光纤的远端。该特征使用户保持与移动目标的有效治疗距离所需的努力最小化。可以使用光谱数据、每个光纤的已知外直径及其从内窥镜突出的角度和/或来自内窥镜图像处理器的输入信号来计算目标与光纤的远端之间的距离。图24a至图24d通过计算激光传送系统1701(光纤)的远端与目标之间的距离的示例方法的方式而示出。在图24a至图24b中示出了光谱学反射信号对目标与激光传送系统1701之间的距离的依赖性。图24a示出了在组织与光谱学探针远端之间的不同距离处测量的730nm处的反射信号强度的示例。图24b示出了在组织与光谱学探针远端之间的不同距离处测量的450nm处的反射信号强度的示例。这样的依赖性可以使用光谱数据和有关激光传送系统几何形状的信息来确定。对光谱学信号的分析允许对距离的快速估计并且将该信息传送给用户。
[0142]
图24c是光纤与组织目标之间的距离计算的示例性算法。在一个示例中,光谱学系统将控制光信号从光源发送至目标,从目标收集光谱响应数据,将响应信号传送至光谱仪,并且将数字光谱数据从光谱仪发送至反馈分析器。如图24c所示,校准曲线1000表示光谱学反射信号强度(例如,响应于电磁辐射从目标结构反射的光谱学信号)和使用从目标结构反射的反馈信号的光纤的远端与目标结构之间的距离1060(例如在图10至图11中所示出的)之间的关系。当目标结构被以特定波长(例如,450nm或730nm)的电磁辐射投射时,可以通过测量组织与光谱学探针远端之间不同距离处的反射信号强度来生成校准曲线1000。通过参考校准曲线,对光谱学信号的分析允许对距离的快速估计。
[0143]
生成校准曲线的示例性过程如下。首先,可以计算针对每个距离的参考值。校准曲线本身可能不用于识别距离,这是因为光反射强度取决于试样的反射率等。用于消除试样反射率的影响的参考值的一个示例如下:
[0144]
参考值=di/dx*1/i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0145]
在体内手术过程期间,操作者可以在连续记录光谱学反馈的情况下移动光纤或内窥镜,直到可以检测到目标组织成分的反射光谱为止。
[0146]
参照图24c,可以在其中反射信号强度为i1的距离x1处测量第一光谱。此时,x1的实际值和反射信号强度的曲线是未知的。然后,可以继续移动光纤或内窥镜远端(反射光检测器),并且可以测量与距离x2对应的下一反射光强度i2。x2可以接近x1,使得x1与x2之间的曲线可以近似为线性的。此时,x1、x2和反射信号强度的曲线是未知的。可以使用i1、i2和δ(x
2-x1)计算比较值,如下:
[0147]
比较值=δ(i
2-i1)/δ(x
2-x1)*1/i1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0148]
然后,在参考值中搜索与比较值相同的参考值。如果发现仅存在一个参考值(xr)与等式(2)中给出的比较值相同,则可以确定xr为x1的距离。如果存在两个参考值(x
r1
,x
r2
),则可以继续移动光纤或内窥镜远端(反射光检测器),并且可以测量与距离x3对应的下一反
射光强度i3。x3可以接近x2,使得x2与x3之间的曲线可以近似为线性的。此时,x1、x2、x3和反射信号强度的曲线是未知的。可以使用i1、i2、i3、δ(x
2-x1)以及δ(x
3-x2)如下计算新的比较值。
[0149]
比较值=δ(i
3-i2)/δ(x
3-x2)*1/i2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0150]
然后,在参考值中搜索与x
r1
δ(x
2-x1)和x
r2
δ(x
2-x1)相同的参考值。参考值可以与等式(3)中给出的比较值进行比较。将其参考值与比较值更相似的距离估计为实际距离。
[0151]
参照图24d,在体内手术过程期间,示例方法可以包括移动光纤或内窥镜以及连续记录光谱学反馈,直到将会检测到目标成分的反射光谱为止。在光谱远端向目标移动的主要情况下,检测到的反射光的强度最初将会较弱,并且将会随着目标与光纤端之间距离的减小而增加。例如,第一光谱是在其中反射信号强度为i1的距离d1上测量的。继续将光纤或内窥镜远端向目标轻微移动,以及连续收集反射数据,并且该方法可以测量与距离d2对应的下一反射光强度i2。然后,该方法可以包括对反射信号强度变化斜率=δ(i
2-i1)/δ(d
2-d1)的值的计算。为了使所计算的斜率的值独立于反射信号强度,可以对所计算的斜率进行归一化。用于计算测量距离处的反射信号强度变化斜率的最终公式变为:
[0152]
斜率(归一化)=[δ(i
2-i1)/δ(d
2-d1)]/ioꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0153]
其中:io=平均(i1,i2)
[0154]
然后,该方法可以将计算的斜率与库中校准曲线上的斜率进行比较,以允许估计所需的距离。所有计算都可以使用软件来快速完成。
[0155]
图25a至图25b示出了组织与光谱学探针远端之间的距离对来自目标的反射光的光谱的影响。图25a示出了各种软组织类型的示例性归一化uv-vis反射光谱,包括膀胱内皮光谱2511、胃内皮光谱2512、胃平滑肌光谱2513、输尿管下光谱2514、输尿管内皮光谱2515、肾盏光谱2516、膀胱肌肉光谱2517、和髓质光谱2518。图25b示出了在组织与光谱学探针远端之间的不同距离例如从0英寸至0.25英寸处记录的特定组织的示例性uv-vis反射光谱。图25a示出了动物软组织光谱的一些示例。图25b呈现了在组织与光谱学探针远端之间的不同距离处记录的组织的示例性uv-vis反射光谱。在该示例中,在目标组织与所呈现的光谱学探针远端之间的不同距离处测量了在450nm和730nm的两个光谱最大值处的反射信号强度,如上面参照图24a至图24b所讨论的。
[0156]
激光控制器1740
[0157]
激光控制器1740可以与激光耦合系统集成。激光耦合系统将一个或更多个激光模块(例如固态激光模块)耦合至光纤中。激光控制器1740可以耦合至反馈分析器1730,反馈分析器1730可以将具有建议设置的优化信号直接发送至激光控制器1740(自动模式),或者请求操作者批准调整激光设置(半自动模式)。图17是全自动激光系统的示意图。图18是其中系统需要例如经由包括输入1850和显示器1860的用户界面的用户批准的半自动激光系统的示意图。在示例中,可以在设定范围内调整激光设置,在示例中,这可以由用户在过程开始时预先确定激光设置。
[0158]
在一些示例中,激光控制器1740可以组合两个或更多个激光脉冲串以创建组合的激光脉冲串。图19a示出了其中激光控制器1740可以产生多个(例如,n个)激光脉冲串1910a至1910n,将激光脉冲串1910a至1910n组合成组合的脉冲串1920,并且在1930处利用组合的脉冲串曝光目标的示例。图19b是示出由从不同的激光模块发射的三个不同的激光串
1941a、1941b和1941c组合的输出激光脉冲串1942的示例的图。如其中所示,激光串1941a、1941b和1941c可以根据反馈分析器信号在不同的时间处开启和/或在不同的时间处关闭。在如其中所示的示例中,输出组合的激光脉冲串1942可以包括其中激光串1941a、1941b和1941c中的两个或更多个在时间上交叠的部分。
[0159]
利用激光模块1910a至1910n、光谱学系统1720和反馈分析器1730的组合,如本文中所描述的激光反馈系统1740可以通过内窥镜连续地识别目标的成分并且在整个过程中更新激光设置。
[0160]
激光系统的主要部件可以根据目标医疗过程容易定制。例如,激光控制器1740支持不同的激光类型以及其组合。这允许较宽范围的输出信号选项,包括功率、波长、脉冲速率、脉冲形状和轮廓、单个激光脉冲串和组合的激光脉冲串。激光系统的操作模式可以被自动调整,或者针对每个期望的光学效果进行建议。光谱学系统收集有关目标材料的信息,这些信息对于诊断目的是有用的,并且用于确认激光参数对于目标是最佳的。反馈分析器1730可以自动优化激光系统的操作模式并且降低人为错误的风险。
[0161]
物联网(iot)系统1750
[0162]
在一些示例中,激光系统可以包括可选的iot系统1750,该可选的iot系统1750支持将光谱数据库档案库存储在云1752上,支持对光谱和最佳设置数据库档案库的快速访问,并且实现云1752与反馈分析器1730之间的通信。数据的云存储支持使用人工智能(ai)技术来为反馈分析器1730提供输入,并且支持对算法和数据库改进的立即访问。
[0163]
根据本文中描述的各种示例,iot系统1750可以包括其中激光系统的部件可以通过互联网与其他部件进行通信和交互的网络。iot支持对存储在云1752上的光谱数据库档案库的快速访问,并且执行在云1752与反馈分析器1730之间的通信。另外,如果需要,可以通过网络远程监测和控制激光系统的所有部件。这种成功连接的示例是医疗物联网(也被称为健康物联网),医疗物联网是iot用于包括用于研究和监测的数据收集和分析的医疗和健康相关目的的可用应用。
[0164]
在各种示例中,iot系统1750可以支持对各种云资源的访问,包括对目标结构(例如,结石结构或解剖组织)的基于云的检测、识别或分类。在一些示例中,机器学习(ml)引擎可以在云1752中实现以提供基于云的目标检测、识别或分类的服务。ml引擎可以包括经训练的ml模型(例如,在一个或更多个微处理器上可执行的机器可读指令)。ml引擎可以从激光系统接收目标光谱学数据或检索存储在云1752中的目标光谱学数据,执行目标检测、识别或分类,并且生成输出例如表示组织类型(例如,正常组织或癌性病变或特定解剖部位处的组织)或结石类型(例如,具有特定成分的肾、膀胱、胰胆管或胆囊的结石)的标记。在手术之前或手术期间从患者收集的其他临床数据中,目标光谱学数据可以在过程结束或其他预定时间被自动上传至云1752。替选地,可以提示系统用户(例如,临床医生)将数据上传至云1752。在一些示例中,输出可以附加地包括目标被识别为组织或结石的概率,或者目标被分类为特定的组织类型或结石类型的概率。例如在执行内窥镜激光手术时,系统用户(例如,临床医生)可以使用这样的云服务来获得关于体内的目标组织或结石的近实时信息。
[0165]
在一些示例中,ml引擎可以包括被配置成使用诸如存储在云1752中的训练数据来训练ml模型的训练模块。训练数据可以包括与目标信息关联的光谱学数据,例如识别目标类型(例如、结石类型或组织类型)的标签。训练数据可以包括基于多种组织类型和/或结石
类型的光谱学分析的实验室数据。附加地或替选地,训练数据可以包括在体外或体内从多个患者获取的临床数据。在一些示例中,在将患者临床数据(例如,光谱学数据)用于上传至云1752以训练ml模型或使用经训练的ml模型执行目标检测、识别或分类之前,可以从患者临床数据中移除患者识别信息。系统可以将去识别的患者临床数据与识别数据源的标签(例如,医院、激光系统识别、手术时间)关联。临床医生可以在手术期间或手术之后分析和确认目标类型(例如,结石或组织类型),并且将目标类型与去识别的患者临床数据关联以形成训练数据。使用去识别的患者临床可以有利地增加基于云的ml模型的鲁棒性,这是因为可以包括来自大量患者群体的附加数据以训练ml模型。这也可以提高ml模型识别罕见结石类型的性能,这是因为来自罕见结石类型的光谱学数据难以在临床上或从实验室获得。
[0166]
可以使用各种ml模型架构和算法,例如决策树、神经网络、深度学习网络、支持向量机等。在一些示例中,ml模型的训练可以连续地或周期性地执行,或者在使附加的光谱学数据可用时接近实时地执行。训练涉及通过算法调整一个或更多个ml模型参数,直到被训练的ml模型满足指定的训练收敛标准为止。所得的经训练的ml模型可以用于基于云的目标检测、识别或分类。利用通过利用存储在云1752中的大量数据训练的ml模型以及连续地或周期性地添加至其中的附加数据,如本文中描述的具有云连接的基于ml的目标识别可以改善体内目标检测、识别、和分类的准确性和鲁棒性。
[0167]
示例内窥镜激光系统
[0168]
图21a至图21d示出了包括具有集成多光纤附件的内窥镜2110的内窥镜激光系统2100a和2100b以及包括如图10a所示的反馈控制的激光治疗系统1010和激光源1020的手术激光系统的示例。替选地,光谱学响应可以由包含检测器例如ccd或cmos传感器的成像系统收集并且传送至光谱仪。目标成分分析可以经由光谱学通过多光纤附件的一个或更多个芯执行,同时用通过多光纤附件的一个或更多个其他芯传输的光源照明目标。
[0169]
如图21a所示,内窥镜激光系统2100a包括多光纤附件,该多光纤附件包括用于将光谱学信号传输回光谱仪1011以及用于将手术激光能量从激光源1020传送至目标结构的光学路径2116。在示例中,光学路径2116包括嵌入在内窥镜2110的细长主体内并且沿其延伸的光纤。在另一示例中,光学路径2116包括沿内窥镜2110的细长主体延伸的两个或更多个光纤。激光控制器1013可以控制激光发射的时序,使得光谱学信号的传输和激光能量的传送发生在不同的时间处或同时发生。
[0170]
多光纤附件可以包括嵌入内窥镜2110的细长主体中并且沿其延伸的两个或更多个光源光纤2114。通过示例的方式而非限制,图21c示出了内窥镜2110的细长主体的径向截面图,其中多个光源光纤2114和光学路径2116纵向定位在内窥镜的细长主体内,并且光源光纤2114例如沿相对于内窥镜的细长主体的径向截面上的光学路径2116的圆周围绕光学路径2116径向分布。在如图21c所示的示例中,光学路径2116可以基本上位于内窥镜2110的细长主体的中心纵向轴线处。通过示例的方式而非限制,如图21c所示,六个光源光纤可以围绕光学路径2116定位。可以使用其他数量的光源光纤和/或光源光纤相对于光学路径2116的其他位置。例如,图21d示出了径向定位在光学路径2116的相对侧处的两个光源光纤2114。光源光纤2114可以耦合至光源1030。替选地,光源光纤2114可以耦合至如图9a至图9b所示的照明源914。来自内窥镜光源——照明源914(例如,一个或更多个led)或者诸如内窥镜外部的远程光源1030的光可以起到照明目标的功能并且产生从目标表面反射的光谱学
信号,该光谱学信号可以被收集用于光谱学分析。反馈分析器1012可以确定内窥镜2110的远端与目标结构122之间的距离1060,如类似于图10至图11中所示。
[0171]
图21b示出了包括多光纤附件的内窥镜激光系统2100b。代替通过光学路径2116传送激光能量,可以使用分离的激光光纤2120以将手术激光能量从激光源1020传送至目标结构。光学路径2116用作用于将光谱学信号传输回光谱仪1011的专用光谱学信号光纤。
[0172]
图22和图23a至图23b示出了可以用于例如上面参照图21a至图21d讨论的光谱学光纤传送系统的多光纤系统的示例。在如图22所示的示例中,多光纤系统2200包括耦合至光源并且被配置成将照明光引导在目标处的第一光纤2210,以及耦合至光谱仪并且配置成将指示目标的光谱学特性的反射信号(例如,从目标反射的光)传输至光谱仪的分离的第二光纤2220。
[0173]
图23a至图23b是具有源光输入和光谱学反馈信号的示例性多光纤附件的图。如图23a所示,多光纤附件2300a可以包括远端部分2310、过渡部分2320a和近端部分2330a。远端部分2310包括可以被定尺寸和定形状成包围第一光纤2210和第二光纤2220的轴,并且过渡部分2320a靠近远端部分2310。第一光纤2210和第二光纤2220可以嵌入远端部分2310的纵向轴中并且沿远端部分2310的纵向轴延伸。该轴可以被定尺寸和定形状成延伸通过内窥镜的工作通道。在一些示例中,第一光纤2210可以包括两个或更多个光纤,每个光纤耦合至光源,以及/或者第二光纤2220可以包括一个或更多个光纤。在一些示例中,如图21c至图21d所示,第二光纤2220可以围绕第一光纤2210径向分布。在示例中,第二光纤2220中的至少一个可以沿轴的基本中心纵向轴线延伸。两个或更多个第一光纤2210可以沿轴的中心纵向轴线延伸地径向地定位在第二光纤2220的相对侧处。
[0174]
近端部分2330a包括被配置成连接至光源的第一连接器2332和被配置成连接至光谱仪的第二连接器2334。过渡部分2320a将远端部分2310和近端部分2330a互连,并且过渡部分2320a可以被配置成将第一连接器2332耦合至第一光纤2210,并且将第二连接器2334耦合至第二光纤2220。因此,过渡部分2320a提供光纤2210和2220从各自的第一连接器2332和第二连接器2334至单个轴的过渡。
[0175]
轴可以包括从远端部分2310向远端延伸的可插入远端2312。可插入远端2312可以被配置成插入患者体内。近端部分2300a可以与手柄关联(例如,包括在手柄中)以供用户操作多光纤附件2300a。在示例中,多光纤附件2300a的至少一部分(例如,远端部分2310、过渡部分2320a或近端部分2330a中的一个或更多个)可以被包括在内窥镜的工作通道中或可插入至内窥镜的工作通道中。
[0176]
图23b示出了多光纤附件2300b的另一示例,多光纤附件2300b是多光纤附件2300a的变型。在图23b所示的示例中,近端部分2330b还可以包括第三连接器2336,第三连接器2336被配置成将激光源耦合至光纤2210或2220之一。类似于图23a,过渡部分2320b将远端部分2310和近侧部分2330b互连。从激光源产生的激光能量可以通过光纤2210或2220之一从近端部分2330b传输至远端部分2310,并且经由可插入远端2312传送至目标治疗部位。在一些示例中,多光纤附件2300b还可以包括不同于光纤2210或2220的激光光纤。激光光纤可以定位在内窥镜的工作通道中,例如在轴内。从激光源产生的激光能量可以通过激光光纤传输至远端部分2310。
[0177]
激光系统的示例应用
[0178]
如根据本公开中的各种示例所描述的激光系统可以用于许多应用,例如内窥镜硬组织手术或内窥镜软组织手术,以改善消融、凝结、汽化或其他激光效果的有效性。
[0179]
激光系统用于组织手术应用的一种应用是关于使用激光系统提供有效的组织消融和凝结,而不是如诸如激光和等离子设备的商业设备上经常使用的两个不同的脚踏板。示例系统使用以两种不同的波长发射的两个或更多个固态激光模块以及uv-vis反射光谱学系统,该两个或更多个固态激光模块通过光纤耦合至激光控制器中,该uv-vis反射光谱学系统将光谱信号传送至在调整之前向用户建议替选设置的反馈分析器。
[0180]
在一个示例中,可以提供包括下述的两个激光模块:第一激光模块,其可以以高组织吸收光波长发射以用于更有效的消融/碳化过程,以及第二激光模块,其可以以较低组织吸收光波长发射以用于例如由于穿透深度与小毛细管的直径相似的更有效的凝结。第一激光模块的示例可以包括:发射uv-vis的inxga1-xn半导体激光器:gan(发射515nm至520nm);inxga1-xn(发射370nm至493nm),或者在表1中总结的高水吸收范围1900nm至3000nm内发射的ir激光器。第二激光模块的示例可以包括:其中发射750nm至850nm的gaxal1-xas、或其中发射904nm至1065nm的inxga1-xas。第一激光模块和第二激光模块两者都可以通过激光耦合系统耦合至激光控制器中。
[0181]
光谱学光源可以集成至单独的光纤通道、激光光纤或内窥镜系统中。从目标反射的光谱学光源信号可以被快速检测并且通过单独的光纤通道或激光光纤传送至光谱仪。替选地,光谱学系统可以从包含探测器例如ccd或cmos传感器的成像系统收集光谱学信号。基于光谱学系统反馈,信号分析器可以检测目标材料成分并且建议第一激光模块设置或第二激光模块设置以实现有效的组织治疗,并且将信号传送至用于向用户提供建议设置信息的输出系统。
[0182]
该示例通过利用其中光波长由反馈分析器系统控制的两个或更多个激光脉冲允许组织消融和凝结。然而,反馈控制可以与单个或多个光波长系统一起使用,以使向目标同时传送特定效果优化。仅从用户的角度来看,这些效果可能是同时的;如本文中描述的特征不限于在完全相同的时间传送波长。
[0183]
图8中呈现了具有光谱学反馈的这种激光器的示例时间操作图。如其中所描述的,其中幅度为a
max
的光反馈信号被连续地传送至目标表面并且从目标表面反射,并且由信号分析器检测和分析。然后,用户可以打开第一激光器,或者在选择消融软组织后保持第一激光器开,而第二激光器为关。在第一激光器的操作期间,光反馈信号被碳化组织高度吸收,直到其幅度降低至阈值水平a
min
为止。然后,信号分析器改变激光器的状态,使得第一激光器关闭,并且第二激光器打开。第二激光被碳化组织高度吸收;因此碳化组织被消融,这有效地去除了碳化。第二激光的波长也提供有效的凝结。由于脱碳过程,光反馈脉冲的幅度返回接近初始水平a
max
。在这种发生时,信号分析器将激光器的状态改变回第一激光器打开并且第二激光器关闭。可以重复上述过程,直到实现所需量的组织消融和凝结为止。
[0184]
激光系统的另一应用是关于用于碎裂患者的肾结石或膀胱结石的有效激光碎石术过程。本技术涉及下述过程:使用具有被目标较少吸收的波长的多波长激光能量首先加热目标,并且然后使用更强的吸收波长来碎裂目标例如诸如肾结石。在激光碎石术期间,由于光热效应,可能会发生肾结石碎裂或膀胱结石碎裂。高激光能量可以被石块吸收,从而导致温度迅速升高至用于化学分解的阈值以上,导致其分解和碎裂。在一个示例中,激光碎石
术可以包括两个阶段过程。第一阶段是预热阶段,其中使用第一波长的激光能量加热石块,这引起由石块的低激光能量吸收。随后的第二阶段涉及应用具有第二波长的激光能量,这引起由石块的比第一波长更强的激光能量吸收。这种多步骤过程允许更好地控制蒸汽气泡产生并且降低碎裂过程中产生的冲击波的强度(减少石块反冲效应)。
[0185]
在示例中,激光系统利用以两种不同的波长发射的两个或更多个固态激光模块以及光谱学系统,该两个或更多个固态激光模块通过光纤耦合至激光控制器中,该光谱学系统将光谱信号传送至在调整之前向用户建议替选设置的反馈分析器。第一激光模块可以发射较低的石块/水吸收光波长,以进行有效的预热;并且第二激光模块可以发射高的石块/水吸收光波长,以进行更有效的石块碎裂。该应用中的第一激光模块可以在较低的石块或水吸收波长下产生输出。该激光器提供有效且均匀的石块预热。用于第一激光模块的第一激光源的示例可以包括其中发射750nm至850nm的gaxal1-xas,或其中发射904nm至1065nm的inxga1-xas。第二激光源的示例可以包括发射uv-vis激光的inxga1-xn半导体激光器,例如其中发射515nm至520nm的gan激光器,或其中发射370nm至493nm的inxga1-xn激光器,或在高水和石块吸收范围1900nm至3000nm内发射并且总结在表1中的ir激光器。
[0186]
第一激光模块和第二激光模块两者都可以通过激光耦合系统耦合至激光控制器。光谱学光源可以集成至单独的光纤通道、激光光纤或内窥镜系统中。从目标反射的光谱学光源信号可以被快速检测并且通过单独的光纤通道或激光光纤传送至光谱仪。替选地,光谱学系统可以从包含检测器例如ccd或cmos传感器的成像系统收集光谱学信号。
[0187]
基于光谱学系统反馈,信号分析器可以检测目标材料成分并且建议第一激光模块设置或第二激光模块设置以实现有效的多步石块处理过程,并且将信号传送至用于向用户提供建议设置信息的输出系统。激光系统可以通过利用来自激光模块的两个或更多个激光脉冲同时传送有效的石块预热和碎裂,其中光波长由反馈分析器系统控制。然而,反馈控制可以与单个或多个光波长系统一起使用,以优化对目标石块成分的特定效果的同时传送。
[0188]
激光系统的又一应用是关于对硬组织例如牙齿、骨骼等执行消融的过程,其中需要高激光输出功率。软组织激光手术的有效性基于100℃的低温水汽化,然而,硬组织切割过程需要非常高的消融温度——高达5,000℃。为了传送增强的输出功率,激光系统可以耦合更多数量的激光模块,以将集成输出功率增加至足以治疗目标的水平。以下激光器可以用作发射源:发射uv-vis的inxga1-xn半导体激光器:gan(发射515nm至520nm);inxga1-xn(发射为370nm至493nm)或总结在表1中的ir激光器1900nm至3000nm。适用于本示例的激光模块的激光源可能包括,例如其中发射750nm至850nm的gaxal1-xas激光器,或其中发射904nm至1065nm的inxga1-xas激光器。
[0189]
激光模块可以集成至具有激光耦合系统的激光控制器中。为了实现要求的高功率,可以将大量激光模块耦合至系统中。光谱学光源可以集成至单独的光纤通道、激光光纤或内窥镜系统中。从目标反射的光谱学光源信号可以被快速检测并且通过单独的光纤通道或激光光纤传送至光谱仪。替选地,光谱学系统可以从包含检测器例如ccd或cmos传感器的成像系统收集光谱学信号。
[0190]
基于光谱学系统反馈,信号分析器可以检测目标材料成分并且建议激光模块设置和激光模块数量,以实现所需的输出功率、有效的多步治疗过程,并且将信号传送至用于向用户提供建议设置信息的输出系统。通过增加包含在治疗过程中的激光模块的数量,激光
系统可以同时传送所需的高激光输出功率,治疗过程使用其中光波长由反馈分析器系统控制的两个或更多个激光脉冲。反馈控制可以与单个或多个光波长系统一起使用,以优化对目标石块成分的特定效果的同时传送。仅从用户的角度来看,这些效果可能是同时的;但是不限于在完全相同的时间传送波长。
[0191]
如本文中所描述的特征可以用于提供识别目标成分的方法。在一些情况下,目标可以是医疗目标,例如通过使用手术附件在体内的软组织和硬组织。该附件可以用于内窥镜或腹腔镜。该附件可以由包含多个光纤的单个设备组成,其目的是至少一个光纤提供光源照明并且至少一个光纤将反射光引导至光谱仪。这允许用户在整个过程中使用或不使用直接内窥镜可视化来连续监测组织或目标的成分。这还具有与激光系统结合使用的能力,其中附件可以向激光系统发送反馈,以基于组织或目标的成分调整设置。该特征将允许在由用户选择的原始激光设置的设定范围内对激光设置的即时调整。如本文中所描述的特征可以与光谱学系统一起使用,该光谱学系统可以与光纤集成激光系统一起使用。光谱学光源可以通过多光纤附件中的至少一个光纤传输。从目标反射的光源信号可以被快速收集并且经由多光纤中的附加光纤传送至光谱仪。
[0192]
示例方法可以基于算法利用光谱学输入数据来计算和控制激光传送系统1701(例如光纤)的远端与组织或目标之间的距离。该方法可以应用于体内手术过程的软组织和硬组织类型两者。可以基于光谱数据的分析计算目标与光纤的远端之间的距离。每个光纤的外直径以及其从内窥镜突出的角度都会影响反射光的强度;对其进行测量以获得光谱数据。使用如本文中所描述的特征,可以计算距离而无需由具有不同数值孔径值的光顺序照明。
[0193]
在移动结石的情况下,该方法可以控制距离并且可以调整或建议使用水中的蒸汽气泡来产生抽吸效应的激光操作参数,以将超过预定阈值的目标拉到更靠近光纤的远端。该特征使用户保持与移动目标的有效治疗距离所需的努力最小化。
[0194]
根据本公开中讨论的各种示例的uv-vis-ir反射光谱学可以单独使用或与其他光谱学技术结合使用,以创建包括在体内诊断或治疗过程期间分析材料化学成分和测量反射光强度的光谱学反馈。反射光可能会产生与眼睛或由高分辨率摄像装置拍摄的彩色图像相同的信息,但是它更定量和客观。反射光谱学提供有关材料的信息,这是因为光反射和吸收取决于其化学成分和表面特性。也可以使用这种技术来获得有关样品的表面和整体特性两者的独特信息。
[0195]
激光系统的又一应用是关于识别目标类型的过程,例如在激光碎石术期间确定结石目标的成分。根据本文中讨论的一些示例,内窥镜系统具有光源,并且光源通过内窥镜的光导向人体内的目标提供照明光。医生使用激光系统在来自内窥镜系统的照明光下破碎石块。如果使用激光系统检测石块成分,这种情况可能会引起一些麻烦。从石块反射的光弱,而另一方面,来自内窥镜系统的照明光强。因此,在由内窥镜系统的照明下可能难以分析石块的成分。
[0196]
图26示出了被配置成使用诸如激光束的诊断束来识别目标(例如,识别结石目标的成分)的内窥镜系统2600的示例。系统2600可以包括控制器2650,控制器2650可以控制内窥镜光源2630和激光生成器模块2640两者。控制器2650可以检测由医生通过激光系统输入的用于激活结石成分检测模式的命令。然后,控制器2650可以向内窥镜光源2630发送命令
以停止照明,或者从高照明模式切换至低照明模式,在低照明模式中,减少的照明量被投射至目标上一定时段。在这样的低照明或无照明时段期间,激光系统2640可以向目标发射激光束并且接收来自石块的反射光。检测器2660可以使用反射光来执行目标识别。通过在低照明模式下对目标部位的照明进行调光(或关闭照明),可以增强入射至目标上的激光束从目标的反射,这可以有助于改善目标识别。
[0197]
一旦检测器2660确定目标识别完成,检测器2660可以向控制器2650发送终止命令。控制器2650然后可以发送命令以重新照明目标,或者从低照明切换回高照明模式。在一个示例中,当内窥镜光源2630接收到用于停止照明或从高照明模式切换为低照明模式的命令时,内窥镜系统2600中的图像处理器2670可以捕获目标的静止图像,并且在时间段期间在内窥镜系统的监视器上显示该静止图像。已经设想了用于识别目标的内窥镜系统2600的变型,例如上面参照图11a至图11b所讨论的那些。
[0198]
图27示出了具有不同脉冲能量或功率水平的激光脉冲序列的图2700,激光脉冲序列例如可以包括第一脉冲串2710和第二脉冲串2720。第二脉冲串2720中的脉冲比第一脉冲串2710中的脉冲具有更高的能量或功率水平。可以由相应的激光源产生第一脉冲串2710和第二脉冲串2720,并且以相应激光束的形式从内窥镜的远端发射第一脉冲串2710和第二脉冲串2720中的每个。第一脉冲串2710可以在时间上例如在特定时间段内(例如,由用户控制)基本恒定地产生。第二脉冲串2720可以在时间上例如在传送第一脉冲串2710期间的特定时间段内间歇地产生。例如,可以在第一脉冲串2710的两个脉冲之间传送第二脉冲串2720或者在第一脉冲串2710的两个串之间传送第二脉冲串2720。在如图27所示的示例中,第一脉冲串2710中的脉冲具有恒定的能量或功率水平,并且第二脉冲串2720仅包括具有比第一脉冲串2710更高的能量或功率水平的一个脉冲。在一些示例中,第二脉冲串2720可以包括两个或更多个脉冲,每个脉冲具有比第一脉冲串2710更高的能量或功率水平。
[0199]
可以通过激光碎石术系统使用如图27所示的激光脉冲序列以提供结石结构例如诸如肾的破裂和碎裂。如图27所示,该序列表示在图的x方向上的时间,但是也用石块或其他目标上的位置“a”和“b”进行注释。因此,激光脉冲的序列表示具有不同脉冲能量或功率水平的激光脉冲的时空模式。在该示例中,位置“a”在石块或其他目标的中心处或附近,而位置“b”在石块或其他目标的外围处或附近。在位置“a”与“b”之间发出的激光脉冲示出了当激光光纤140从位置“a”平移至位置“b”时发出的脉冲,或者当激光光纤140从位置“b”平移至位置“a”时发出的脉冲,例如可以包括使用致动器。可以选择第一脉冲串2710以在目标石块中引起裂纹而不使目标石块碎裂。因此,在图27中,这样的第一脉冲串2710可以在位置“a”处开始朝向石块的中心发出,然后朝向位置“b”朝向石块的外围前进,并且然后返回朝向位于石块中心处的位置“a”,此时可以在第一次尝试中传送更高能量脉冲2720使目标石块碎裂。如果通过更高能量脉冲2720进行的这样的碎裂不成功,则进一步的第一脉冲串2710可以从朝向石块中心的位置向朝向石块外围的位置“b”前进传送,并且然后返回朝向石块中心处的位置“a”,此时另一更高能量的脉冲2720可以在第二次尝试中传送以碎裂目标石块。进一步的迭代也是可能的。朝向石块外围的相同或不同位置“b”可以用于各种迭代,其中不同迭代中的不同位置“b”沿从位置“a”至这样的不同外围位置“b”的这样的路径产生多个裂纹。可能优选仅使用朝向石块中心的较高能量脉冲2720,例如以使第二脉冲串2720对附近组织的影响最小化。
[0200]
在一些示例中,图27中所示的具有不同脉冲能量或功率水平的激光脉冲序列可以由在目标部位处提供止血或凝结的内窥镜系统使用。在示例中,第一脉冲串2710和第二脉冲串2720可以以时空模式例如诸如时间上的交替方式传送至目标部位,以促进有效的止血或凝结过程。
[0201]
具有不同能量或功率水平的脉冲例如第一脉冲串2710和第二脉冲串2720可以经由用户可操作的致动器例如按钮或脚踏板来可控地激活。例如,用户可以使用第一激活模式(例如,按钮或脚踏板的单次按压)来激活第一脉冲串2710的传送,并且使用第二激活模式(例如,按钮或脚踏板的两次按压)来激活第二脉冲串2720的传送。在示例中,可以经由各自独立的致动器来控制第一脉冲串2710和第二脉冲串2720。附加地或替选地,可以例如基于来自目标的反馈信号可控地自动激活第一脉冲串2710和第二脉冲串2720。例如,光谱仪可以收集目标的光谱学数据,并且反馈分析器可以分析光谱学数据以识别结石结构的不同部分的成分。至少基于这样的识别,不同的能量脉冲例如第一脉冲串2710或第二脉冲串2720可以被传送至具有各自识别的成分的目标的不同部分。
[0202]
图28大体示出了可以在其上执行本文中讨论的任何一种或更多种技术(例如,方法)的示例机器2800的框图。根据如本公开中讨论的示例,本描述的部分可以应用于激光治疗系统的各个部分的计算框架。
[0203]
在替选的实施方式中,机器2800可以操作为独立的设备或者可以连接(例如,联网)至其他机器。在联网的部署中,机器2800可以在服务器-客户端网络环境中以服务器机器、客户端机器或两者的能力进行操作。在示例中,机器2800可以用作对等式(p2p)(或其他分布式)网络环境中的对等机器。机器2800可以是个人计算机(pc)、平板pc、机顶盒(stb)、个人数字助理(pda)、移动电话、web应用、网络路由器、交换机或桥接器,或者能够(顺序地或以其他方式)执行指定要由该机器采取的动作的指令的任何机器。此外,尽管仅示出了单个机器,但是术语“机器”也可以被视为包括单独或联合地执行一组(或多组)指令以执行本文所讨论的诸如云计算、软件即服务(saas)或其他计算机集群配置的方法中的任意一个或更多个的机器的任何集合。
[0204]
如本文所描述的,示例可以包括逻辑或多个部件或机制,或者可以由逻辑或多个部件或机制操作。电路组是在包括硬件(例如,简单电路、栅、逻辑等)的有形实体中实现的电路的集合。电路组成员可以随时间和潜在的硬件的变化而变化。电路组包括可以在操作时单独或组合执行指定操作的成员。在示例中,电路组的硬件可以被不变地设计成执行指定操作(例如,硬连线)。在示例中,电路组的硬件可以包括可变地连接的物理部件(例如,执行单元、晶体管、简单电路等)以对指定操作的指令进行编码,可变地连接的物理部件包括被物理地修改(例如,磁力地、电力地、不变质量粒子的可移动放置等)的计算机可读介质。在连接物理部件时,硬件组成的潜在电性能被改变,例如从绝缘体被改变为导体或者从导体被改变为绝缘体。指令使得嵌入式硬件(例如,执行单元或加载机制)能够经由可变连接创建硬件中的电路组的成员以在操作时执行指定操作的部分。因此,当设备在操作时,计算机可读介质被通信地耦合至电路组成员的其他部件。在示例中,物理部件中的任何部件可以在多于一个电路组的多于一个成员中使用。例如,在操作中,执行单元可以在一个时间点在第一电路组的第一电路中使用,并且在不同的时间被第一电路组中的第二电路或者被第二电路组中的第三电路重复使用。
[0205]
机器(例如,计算机系统)2800可以包括硬件处理器2802(例如,中央处理单元(cpu)、图形处理单元(gpu)、硬件处理器核或其任意组合)、主存储器2804和静态存储器2806,以上中的一些或所有可以经由互连链路(例如,总线)2808来彼此通信。机器2800还可以包括显示单元2810(例如,光栅显示器、矢量显示器、全息显示器等)、字母数字输入设备2812(例如,键盘)以及用户接口(ui)导航设备2814(例如,鼠标)。在示例中,显示单元2810、输入设备2812和ui导航设备2814可以是触摸屏显示器。机器2800可以附加地包括存储设备(例如,驱动单元)2816、信号生成设备2818(例如,扬声器)、网络接口设备2820以及一个或更多个传感器2821例如全球定位系统(gps)传感器、指南针、加速度计或其他传感器。机器2800可以包括输出控制器2828,例如串行(例如,通用串行总线(usb)、并行或者其他有线或无线(例如,红外(ir)、近场通信(nfc)等)连接以进行通信或控制一个或更多个外围设备(例如,打印机、读卡器等)。
[0206]
存储设备2816可以包括其上存储有一组或更多组数据结构或指令2824(例如,软件)的机器可读介质2822,所述数据结构或指令2824实现本文描述的技术或功能中的任何一个或更多个或由其利用。指令2824还可以在机器2800执行该指令期间全部地或至少部分地驻留在主存储器2804内、静态存储器2806内或硬件处理器2802内。在示例中,硬件处理器2802、主存储器2804、静态存储器2806或存储设备2816中的一个或任意组合可以构成机器可读介质。
[0207]
尽管机器可读介质2822被示出为单个介质,但是术语“机器可读介质”可以包括被配置成存储一个或更多个指令2824的单个介质或多个介质(例如,集中式数据库或分布式数据库,和/或关联的缓存和服务器)。
[0208]
术语“机器可读介质”可以包括能够存储、编码或携载用于由机器2800执行并且使机器2800执行本公开内容的技术中的任意一个或更多个的指令或者能够存储、编码或携载由这样的指令使用的数据结构或者与这样的指令关联的数据结构的任意介质。非限制性机器可读介质示例可以包括固态存储器以及光学和磁性介质。在示例中,大容量机器可读介质包括具有多个粒子的机器可读介质,所述粒子具有不变(例如,静止)质量。因此,大容量机器可读介质不是暂态传播信号。大容量机器可读介质的具体示例可以包括:非易失性存储器,例如半导体存储器设备(例如,电可编程只读存储器(eprom)、电可擦除可编程只读存储器(epsom))和闪速存储器设备;磁盘,例如内部硬盘和可移动盘;磁光盘;以及cd-rom和dvd-rom盘。
[0209]
还可以利用多个传输协议(例如,帧中继、互联网协议(ip)、传输控制协议(tcp)、用户数据报协议(udp)、超文本传输协议(http)等)中的任意一个经由网络接口设备2820使用传输介质通过通信网络2826发送或接收指令2824。示例通信网络可以包括局域网(lan)、广域网(wan)、分组数据网络(例如,因特网)、移动电话网络(例如,蜂窝网络)、普通老式电话(pots)网络以及无线数据网络(例如,被称为的电气和电子工程师协会(ieee)802.11标准族、被称为的ieee 802.16标准族)、ieee 802.15.4标准族、对等式(p2p)网络等。在示例中,网络接口设备2820可以包括一个或更多个物理插孔(例如,以太网、同轴或电话插孔)或者用于连接至通信网络2826的一个或更多个天线。在示例中,网络接口设备2820可以包括多个天线,以使用单输入多输出(simo)技术、多输入多输出(mimo)技术或多输入单输出(miso)技术中的至少一种技术来无线地通信。术语“传输介质”应当被
认为包括能够存储、编码或携带用于由机器2800执行的指令的任何无形介质,并且术语“传输介质”应当被认为包括数字通信信号或模拟通信信号或其他无形介质以促进这样的软件的通信。
[0210]
附加说明
[0211]
以上的详细描述包括对附图的参照,这些附图形成详细描述的一部分。作为说明,附图示出了其中可以实践本发明的具体的实施方式。这些实施方式在本文中也被称为“示例”。这样的示例可以包括除了示出的或描述的元素之外的元素。然而,本发明人还考虑了其中仅提供了示出的或描述的那些元素的示例。此外,本发明人还考虑了使用关于特定示例(或者特定示例的一个或更多个方面)或关于在本文中示出或描述的其他示例(或者其他示例的一个或更多个方面)示出的或描述的这些元素(或者这些元素的一个或更多个方面)的任何结合或置换的示例。
[0212]
在本公开中,如在专利公开中常见的那样,不管“至少一个”或“一个或更多个”的任何其他实例或用法,使用术语“一”或“一个”来包括一个或多于一个。在本公开中,除非以其他方式指示,否则术语“或”被用来指的是非排他性的或,使得“a或b”包括“a而非b”、“b而非a”以及“a和b”。在本公开中,术语“包括”和“在
……
中”用作相应术语“包含”和“其中”的简明英语等同物。此外,在所附权利要求中,术语“包括”和“包含”是开放式的,也就是说,包括除权利要求中的这样的术语之后列出的那些要素之外的要素的系统、设备、物品、成分、配方或过程仍然被认为落在该权利要求的范围内。此外,在所附权利要求中,术语“第一”、“第二”和“第三”等仅用作标记,并不旨在对其对象施加数值要求。
[0213]
上面的描述旨在是说明性的,而不是限制性的。例如,上面描述的示例(或示例的一个或更多个方面)可以彼此组合地使用。例如由本领域普通技术人员在查阅以上描述后可以使用其他实施方式。提供的摘要以符合37c.f.r.
§
1.72(b),以使得读者能够快速确定本技术公开内容的性质。提交了摘要并理解:摘要将不会被用来解释或限制权利要求的范围或含义。此外,在上面的具体实施方式中,各种特征可以被结合在一起以组织本公开内容。这不应当被解释成意为:对于任何权利要求而言,未要求保护的公开特征均是必要的。而是,发明主题可能在于少于特定公开的实施方式的所有特征。因此,所附权利要求由此作为示例或实施方式并入到具体实施方式中,其中,每项权利要求独立作为单独的实施方式,并且预期这样的实施方式可以以各种结合或置换的方式相互结合。本发明的范围应当参照所附权利要求以及这样的权利要求所授权的等同物的全部范围来确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。