1.本发明涉及风电轮毂打磨设备技术领域,更具体地说,特别涉及一种风电轮毂自动打磨系统。
背景技术:
2.近年来,我国风电行业发展迅速,我国已经成为全球风力发电规模最大,增长最快的国家。但是风电行业的装备制造业依旧发展缓慢,装备车间内对风机轮毂、转轴等零部件的打磨清理除锈工序,依然长期停留在人工打磨,由于风机轮毂尺寸较大,人工打磨移动不便,效率慢,人工操作差异化大,人工成本高,而且车间粉尘容易给工人造成肺病危害。因此,提高风电铸件打磨的效率和精度,自动化、智能化的加工作业模式成为风电行业的必然趋势。
技术实现要素:
3.本发明的目的在于提供一种移动稳定、打磨效率和精度高的风电轮毂自动打磨系统。
4.为了达到上述目的,本发明采用的技术方案如下:一种风电轮毂自动打磨系统,包括升降架、旋转工作台、刀库和机器人打磨臂、扫描识别装置和行走驱动装置,扫描识别装置安装在机器人打磨臂上,机器人打磨臂通过行走驱动装置与升降架滑动连接,行走驱动装置用于驱动机器人打磨臂沿着升降架上下移动。
5.优选地,所述升降架包括竖架,竖架底部固定安装有底支撑座,竖架前侧表面固定安装有齿板,竖板前侧表面中部竖向开设有滑槽口,竖板顶部安装有配重装置,配重装置与行走驱动装置连接。
6.优选地,所述行走驱动装置包括伺服电机、行走齿轮和挂架,所述机器人打磨臂通过吊架与挂架固定连接,吊架与机器人打磨臂之间固定安装有旋转座,旋转座用于控制机器人打磨臂的转动,所述伺服电机固定安装在挂架上部,伺服电机的行走齿轮与齿板啮合,行走齿轮中部通过销轴与滑槽口滑动连接,伺服系统保证了系统运动精度及效率。
7.优选地,所述配重装置包括链轮、链条和配重块,链轮活动安装在竖架顶部,所述链条绕在链轮上,链条两端分别与挂架和配重块固定连接,配重块滑动设在竖架内部,达到节能增效的目的。
8.优选地,所述机器人打磨臂的打磨头上安装有恒力浮动装置,保证打磨效率以及精度。
9.优选地,所述吊架底部固定安装有接近开关和液压缓冲器,所述底支撑座上表面在液压缓冲器下方位置固定安装有缓冲垫,增强了系统安全性。
10.优选地,所述扫描识别装置为激光测距传感器和激光3d智能相机,保证建模的精度。
11.与现有技术相比,本发明的优点在于:
12.本发明打磨系统能够精准且高效的对风电轮毂打磨,通过机器人代替人工打磨,减少操作人员恶劣环境下的工作量,提高效率,节省成本,逐渐减少操作人员患肺病的风险,行走驱动装置用于驱动机器人打磨臂沿着升降架上下移动,便于对风电轮毂不同高度位置进行打磨,其结构稳定,保证了打磨过程稳定性。
附图说明
13.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
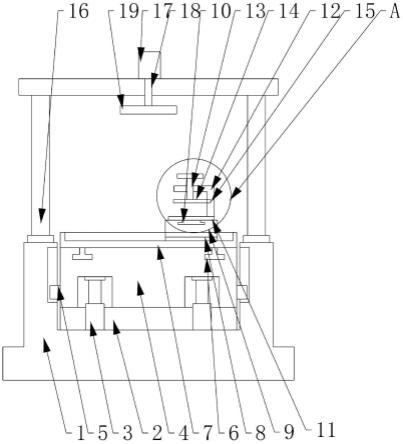
14.图1是本发明一种风电轮毂自动打磨系统的结构图;
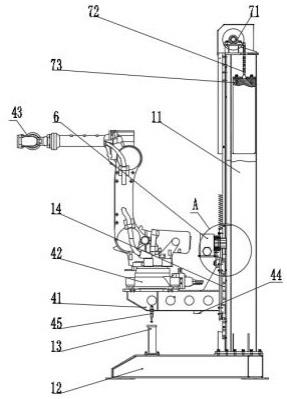
15.图2是本发明升降架及机器人打磨臂的结构图;
16.图3是图2中a处结构放大示意图。
17.图中:1升降架、11竖架、12底支撑座、13缓冲垫、14滑板、2旋转工作台、3刀库、4机器人打磨臂、41吊架、42旋转座、43横力浮动装置、44接近开关、45油压缓冲器、5扫描识别装置、6行走驱动装置、61伺服电机、62行走齿轮、63挂架、64齿板、65滑槽口、7配重装置、71链轮、72链条、73配置块。
具体实施方式
18.下面结合附图对本发明的优选实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
19.实施例一
20.参阅图1和图2所示,本发明提供一种风电轮毂自动打磨系统,包括升降架1、旋转工作台2、刀库3和机器人打磨臂4,刀库3用于放置多个打磨头,便于机器人打磨臂4进行更换打磨头,旋转工作台2用于放置风电轮毂,旋转工作台2用于旋转风电轮毂,便于打磨工作,机器人打磨臂4为现有技术中可以伸缩的机器臂,其具有打磨头,用于对风电轮毂进行打磨,还包括扫描识别装置5和行走驱动装置6,扫描识别装置5安装在机器人打磨臂4上,机器人打磨臂4通过行走驱动装置6与升降架1滑动连接,行走驱动装置6用于驱动机器人打磨臂4沿着升降架1上下移动,便于对风电轮毂不同高度位置进行打磨;
21.其中,扫描识别装置5用于扫描识别风电轮毂表面的3d图像,扫描识别装置5为激光测距传感器和激光3d智能相机,能够获取风电轮毂表面至打磨头之间的距离和高清图像,行走驱动装置6和机器人打磨臂4均与plc连接,plc与远程控制台连接,plc中可预设打磨的轨迹路线,远程控制台通过plc可以控制行走驱动装置6和机器人打磨臂4的移动,从而使工作人员能够根据风电轮毂图像进行精准的打磨;
22.机器人打磨臂4根据预设打磨的轨迹路线通过行走驱动装置6移动至合适高度位置,此时机器人打磨臂4的打磨头根据预设的轨迹路线对风电轮毂进行打磨。
23.实施例二
24.参阅图2所示,本实施例中,升降架1包括竖架11,竖架11底部固定安装有底支撑座12,竖架11前侧表面固定安装有齿板65,竖板11前侧表面中部竖向开设有滑槽口65,竖板11
顶部安装有配重装置7,配重装置7与行走驱动装置6连接。
25.参阅图3所示,本实施例中,行走驱动装置6包括伺服电机61、行走齿轮62和挂架63,机器人打磨臂4通过吊架41与挂架63固定连接,吊架41与机器人打磨臂4之间固定安装有旋转座42,旋转座42用于控制机器人打磨臂4的转动,伺服电机61固定安装在挂架63上部,伺服电机61的行走齿轮62与齿板64啮合,行走齿轮62中部通过销轴与滑槽口65滑动连接,避免行走齿轮62左右移动,通过伺服电机61带动行走齿轮62转动,能够控制挂架63的升降,从而控制机器人打磨臂4的升降。
26.本实施例中,配重装置7包括链轮71、链条72和配重块73,链轮71活动安装在竖架11顶部,链条72绕在链轮71上,链条72两端分别与挂架63和配重块73固定连接,配重块73滑动设在竖架11内部,当挂架63升降时,链轮71也会发生转动,从而带动配重块73的升降,配重块73起到稳定挂架63的作用。
27.本实施例中,机器人打磨臂4的打磨头上安装有恒力浮动装置43,恒力浮动装置43是现有技术中保证打磨头能够平稳打磨的装置,能够使打磨头以水平状态始终与风电轮毂表面恒力接触。
28.实施例三
29.本实施例中,吊架41底部固定安装有接近开关44和液压缓冲器45,接近开关44能够实时检测吊架41的高度位置,从而能够计算出打磨头的高度位置,保证打磨头能够精准对标识坐标点进行打磨,底支撑座12上表面在液压缓冲器45下方位置固定安装有缓冲垫13,避免吊架41碰撞到底支撑座12,降低损伤。
30.虽然结合附图描述了本发明的实施方式,但是专利所有者可以在所附权利要求的范围之内做出各种变形或修改,只要不超过本发明的权利要求所描述的保护范围,都应当在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。