技术特征:
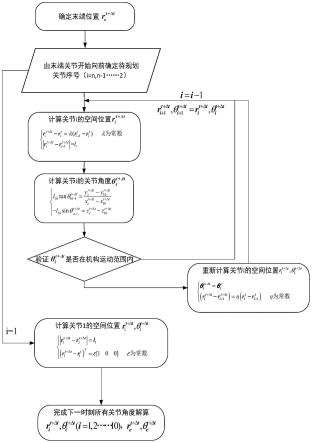
1.一种绳驱蛇形机械臂路径规划首尾运动跟随方法,所述绳驱蛇形机械臂包括n个锥节和n个关节,所述n大于3,其特征在于,所述规划运动跟随方法包括:根据绳驱蛇形机械臂臂体末端点的空间位置末端点下一时刻的空间位置及末端关节的空间位置获取下一时刻臂体末端关节的空间位置和角度根据下一时刻臂体末端关节的空间位置和关节跟随运动规划条件获取第i个关节的下一时刻位置及角度,i=n-1,n-2,
……
,2,依次类推,直至获得第2关节下一时刻的空间位置和角度根据第2个关节的空间位置及角度获取第1个关节的空间位置r
1t δt
及角度根据获取的所有关节的角度完成绳驱蛇形机械臂路径规划运动跟随。2.根据权利要求1所述的一种绳驱蛇形机械臂路径规划首尾运动跟随方法,其特征在于,所述获取下一时刻臂体末端关节的空间位置和角度具体为:臂体末端的第n个关节沿上一时刻t该关节的轴向方向运动,所述运动的时间步长为δt,该关节在下一时刻t δt的空间位置到末端距离为第n个锥节的长度l
n
;则根据求解方程:获得臂体末端的第n个关节的空间位置臂体末端的第n个关节的角度根据求解方程获得:根据求解方程获得:为臂体末端在惯性系下的x、y、z方向的坐标。3.根据权利要求2所述的一种绳驱蛇形机械臂路径规划首尾运动跟随方法,其特征在于,所述运动跟随方法还包括判断臂体末端的第n个关节的角度是否在臂体末端的关节的机构运动空间内:若所述关节角度在机构运动空间内,则空间位置为和角度为下一时刻臂体末端的第n个关节的空间位置和角度;否则,则判定绳驱蛇形机械臂在进行平移运动,并获取当前绳驱蛇形机械臂末端第n个关节的空间位置和角度。4.根据权利要求3所述的一种绳驱蛇形机械臂路径规划首尾运动跟随方法,其特征在于,所述获取当前绳驱蛇形机械臂末端第n个关节的空间位置和角度是根据求解方程获得:5.根据权利要求1所述的一种绳驱蛇形机械臂路径规划首尾运动跟随方法,其特征在
于,所述根据下一时刻臂体末端关节的空间位置和关节跟随运动规划条件获取第i个关节的下一时刻位置及角度,i=n-1,n-2,
……
,2,依次类推,直至获得第2关节下一时刻的空间位置和角度具体为:获取第i个关节的下一时刻位置根据求解方式:所述i=n-1,n-2,
……
,2;l
i
为第i个锥节的长度;获取第i个关节的下一时刻角度根据求解方式:其中,为第i个关节在惯性系下的x、y、z方向的坐标;6.根据权利要求5所述的一种绳驱蛇形机械臂路径规划首尾运动跟随方法,其特征在于,所述运动跟随方法还包括根据臂体的第i个关节的角度进行第i个关节是否在机构运动空间的判断:若所述关节角度在机构运动空间内,则空间位置为和角度为下一时刻臂体的第i个关节的空间位置和角度;否则,则判定绳驱蛇形机械臂在进行平移运动,并获取当前臂体第i个关节的空间位置和角度。7.根据权利要求1所述的一种绳驱蛇形机械臂路径规划首尾运动跟随方法,其特征在于,所述获取第1个关节的空间位置r
1t δt
及角度根据求解方程:获得第1关节的空间位置r
1t δt
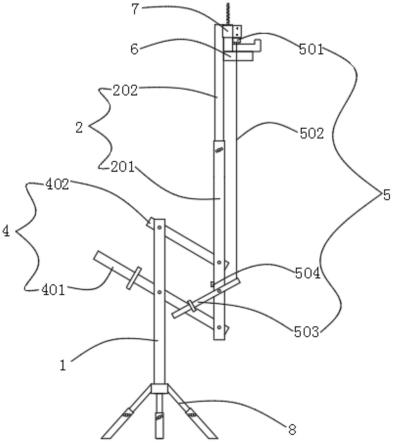
,其中,l1为第1个锥节的长度;然后再求解方程获得第1个关节下一时刻的角度其中,为第1个关节在在惯性系下的x、y、z方向的坐标。8.一种绳驱蛇形机械臂路径规划首尾运动跟随装置,所述绳驱蛇形机械臂包括n个锥节和n个关节,所述n大于3,其特征在于,所述规划运动跟随装置包括:臂体末端空间位置获取单元,用于根据绳驱蛇形机械臂臂体末端点的空间位置末
端点下一时刻的空间位置及末端关节的空间位置获取下一时刻臂体末端关节的空间位置和角度关节参数获取单元,用于根据下一时刻臂体末端关节的空间位置和关节跟随运动规划条件获取第i个关节的下一时刻位置及角度,i=n-1,n-2,
……
,2,依次类推,直至获得第2关节下一时刻的空间位置和角度根据第2个关节的空间位置及角度获取第1个关节的空间位置r
1t δt
及角度路径规划运动跟随单元,用于根据获取的所有关节的角度完成绳驱蛇形机械臂路径规划运动跟随。9.一种计算机设备,其特征在于:包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时,所述处理器执行根据权利要求1-7任一项所述的一种绳驱蛇形机械臂路径规划运动跟随方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于储存计算机程序,所述计算机程序执行权利要求1-7任一项所述的一种绳驱蛇形机械臂路径规划运动跟随方法。
技术总结
一种绳驱蛇形机械臂路径规划运动跟随方法、装置、计算机及存储介质,属于路径规划领域。解决了传统机械臂不能在复杂环境下进行探索的问题。所述绳驱蛇形机械臂包括n个锥节和关节组成,所述n大于3,所述方法包括:根据臂体末端点空间位置、末端点下一时刻空间位置及末端关节空间位置获取下一时刻臂体末端关节空间位置和角度;根据下一时刻臂体末端关节空间位置和关节跟随运动规划条件获取第i个关节的下一时刻位置及角度,直至获得第2关节下一时刻空间位置和角度;根据第2个关节空间位置及角度获取第1个关节空间位置及角度;获取所有关节的角度,完成绳驱蛇形机械臂路径规划运动跟随。适用于狭窄复杂的空间环境的路径规划。适用于狭窄复杂的空间环境的路径规划。适用于狭窄复杂的空间环境的路径规划。
技术研发人员:谷海宇 黄倬然 向阳 刘鹏 魏承
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.01.26
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。