1.本发明属于生肉加工设备技术领域,具体地说是涉及一种猪胴体在线分割系统。
背景技术:
2.猪胴体是指猪在屠宰后,去头、四肢下段(腕关节,飞关节一下)、内脏(保留板油和肾脏)、去毛后所得的屠体叫胴体,分割装置指把一个猪胴体按照不同位置进行分割,从而把一个完整的猪胴体分割成几段或几片,从而满足客户的定制要求。
3.市场上的猪胴体分割装置常为手动或者半自动,需要人工通过眼睛判断所需分割位置,然后控制分割刀具将相应位置进行分割,其分割效率低;不同的生猪体型也不同,那么流水线的人工分割就需要每次调整切割刀具的位置,对于人工劳动强度也很大。
技术实现要素:
4.本发明的目的是提供一种猪胴体在线分割系统,其已在解决背景技术中存在的技术问题。
5.为解决上述技术问题,本发明的目的是这样实现的:
6.一种猪胴体在线分割系统,
7.一种猪胴体在线分割系统,其特征在于:
8.包括以下分割步骤:
9.s1:悬挂输送线将挂设有猪胴体的猪胴体挂钩组件以间歇运动的方式移动图像采集装置,对猪胴体的图像或影像信息进行采集;
10.s2:工控机对图像采集装置采集的图像或影像信息进行分析处理,获得第一分割位置和第二分割位置的信息;
11.s3:猪胴体的猪胴体挂钩组件在悬挂输送线带动下移动至悬挂输送线的末端,触发定位装置,定位装置将猪胴体挂钩组件定位;
12.s4:第一悬挂拖动装置抓取猪胴体挂钩组件,第一稳定装置夹持猪胴体远离第一悬挂拖动装置的一端;其中包括第一稳定装置和第二稳定装置根据步骤s2中获取的第一分割位置和第二分割位置信息调整其夹持高度的步骤;第一分割装置和第二分割装置根据步骤s2中获取的第一分割位置和第二分割位置信息调整其切割位置的步骤;
13.s5:第一悬挂拖动装置和第一稳定装置同步带动猪胴体挂钩组件向第二悬挂拖动装置移动,移动过程中,猪胴体被第一分割装置沿其第一分割位置分割;分割位置高于第一稳定装置的夹持位置,分割完成后第一稳定装置释放,分割后的部分与第一稳定装置分离;
14.s6:第一悬挂拖动装置移动至其末端时释放猪胴体挂钩组件;
15.s7:第二悬挂拖动装置和第二稳定装置移动至猪胴体挂钩组件被释放的位置,第二悬挂拖动装置夹持猪胴体挂钩组件,第二稳定装置夹持猪胴体远离猪胴体挂钩组件的一端;
16.s8:第二悬挂拖动装置和第二稳定装置同步带动猪胴体挂钩组件向后端移动,移
动过程中,猪胴体被第二分割装置沿其第二分割位置分割;分割位置高于第二稳定装置的夹持位置,分割完成后第二稳定装置释放,分割后的部分与第二稳定装置分离;
17.s9:分割完成,猪胴体挂钩组件沿悬挂输送线向下一工序移动。
18.在上述方案的基础上并作为上述方案的优选方案:还包括
19.悬挂输送线,猪胴体挂钩组件借助所述悬挂输线间歇或连续的运动;猪胴体悬挂于所述猪胴体挂钩组件上;
20.图像采集装置,在所述猪胴体挂钩组件间歇或连续运动时,对所述猪胴体进行图像采集;并由采集的图像分析处理确定出第一分割位置以及第二分割位置;
21.第一悬挂拖动装置,位于所述悬挂输送线的驱动结束端,带动所述猪胴体挂钩组件继续向后端移动;
22.第二悬挂拖动装置,位于第一悬挂拖动装置的后端,接替所述第一悬挂拖动装置带动所述猪胴体挂钩组件继续向后端移动;
23.第一稳定装置,位于所述悬挂输送线的下方;所述第一稳定装置可将猪胴体远离所述猪胴体挂钩组件的一端固定,且与所述第一悬挂拖动装置同步水平移动;
24.第二稳定装置,位于所述悬挂输送线的下方且位于所述第一稳定装置的后端;所述第一稳定装置可将猪胴体远离所述猪胴体挂钩组件的一端固定,且与所述第二悬挂拖动装置同步水平移动;
25.第一分割装置,可根据确定出的第一分割位置进行适应性的高度调整,在第一悬挂拖动装置和所述第一稳定装置拖动所述猪胴体挂钩组件向后端移动过程中,对所述猪胴体的第一分割位置进行切割分离;
26.第二分割装置,可根据确定出的第二分割位置进行适应性的高度调整,在第二悬挂拖动装置和所述第二稳定装置拖动所述猪胴体挂钩组件向后端移动过程中,对所述猪胴体的第二分割位置进行切割分离;
27.定位装置,位于所述悬挂输送线的驱动结束端;在所述猪胴体挂钩组件移出所述悬挂输送线的驱动结束端后,所述定位装置将所述猪胴体挂钩组件定位,所述第一悬挂拖动装置由所述定位装置定位的位置为起点,拖动所述猪胴体挂钩组件向所述第二悬挂拖动装置所在位置移动。
28.在上述方案的基础上并作为上述方案的优选方案:所述悬挂输送线包括至少一连续管轨,所述管轨向后端延伸,且其后端具有设定斜度;所述猪胴体挂钩组件滑动设置于所述管轨上。
29.在上述方案的基础上并作为上述方案的优选方案:所述悬挂输送线包括间歇驱动装置,其带动所述猪胴体挂钩组件间歇性的移动,且所述图像采集装置在其间歇期间对悬挂于所述猪胴体挂钩组件上的猪胴体进行图像采集。
30.在上述方案的基础上并作为上述方案的优选方案:所述间歇驱动装置包括气缸、拖板以及推指,所述气缸的输出端固定连接于连接件,所述连接件固设于所述拖板上,由所述气缸带动所述拖板往复运动;所述推指沿所述拖板延伸方向均布,每个所述推指一端铰接于所述拖板上,每个所述推指与所述拖板的铰接端设置有限位部,所述限位部使所述推指仅能绕其铰接轴逆时针的设定范围内转动。
31.在上述方案的基础上并作为上述方案的优选方案:所述第一稳定装置的夹持高度
低于所述第二稳定装置的夹持高度。
32.在上述方案的基础上并作为上述方案的优选方案:所述定位装置包括定位气缸、传感器组件以及定位钳,所述定位钳固设于所述定位气缸的活塞杆上,所述传感器组件可被所述猪胴体挂钩组件触发,以使所述定位气缸带动所述定位钳向所述猪胴体挂钩组件定位。
33.在上述方案的基础上并作为上述方案的优选方案:所述定位钳具有开口为v形的钳口,定位后,所述连接板接纳于所述钳口内;所述传感器组件包括触发杆、杠杆、触发块、传感器以及杠杆轴,所述触发杆与所述管轨平行设置,所述触发杆两端向背离所述管轨所在方向弯折,所述触发杆固设于所述杠杆的一端,所述杠杆绕所述杠杆轴转动,远离所述触发杆的一端固设于所述触发块;所述猪胴体挂钩组件沿所述管轨滑动过程中,所述连接板推动所述触发杆向远离所述管轨所在方向移动,经由杠杆带动所述触发块将所述传感器触发。
34.在上述方案的基础上并作为上述方案的优选方案:所述第一悬挂拖动装置包括第一夹爪以及第一往复拖动机构,所述第一夹爪固设于所述直线往复驱动机构的输出端,所述第一夹爪夹持所述猪胴体挂钩组件后,借助所述第一往复拖动机构带动所述猪胴体挂钩组件向所述第二悬挂拖动装置移动。
35.在上述方案的基础上并作为上述方案的优选方案:第一分割装置包括第一分割刀具、第一分割电机以及第一分割高度调节组件,所述第一分割刀具固设于所述第一分割电机的动力输出端,所述第一分割电机固设于所述第一分割高度调节组件的调节端;所述第一分割刀具的切割面与水平面平行,借由所述第一分割高度调节组件带动所述第一分割刀具的水平高度,实现对第一分割位置的确定。
36.在上述方案的基础上并作为上述方案的优选方案:所述第一稳定装置包括第一夹持机构、第一夹持竖直调节机构以及第一夹持水平运动机构,所述第一夹持水平运动机构固设于所述第一夹持竖直调节机构的输出端,所述第一夹持机构固设于所述第一夹持水平运动机构的输出端;所述第一夹持竖直调节机构根据第一分割位置对所述第一夹持机构的竖直位置进行调节,所述第一夹持水平运动机构带动所述第一夹持机构与所述第一悬挂拖动装置同步移动。
37.本发明相比现有技术突出且有益的技术效果是:通过悬挂输送线实现对猪胴体的流水线运输,通过定位装置进行初始位置定位,结合第一分割装置、第一悬挂拖动装置以及第一稳定装置对猪胴体的第一分割位置进行分割,分割后再由第二悬挂拖动装置沿管轨继续移动,借助第二稳定装置以及第二分割装置对猪胴体的第二分割位置进行分割,由此完全替代传统人工对猪胴体分割所存在的弊端,分割更高效,节省人力。
附图说明
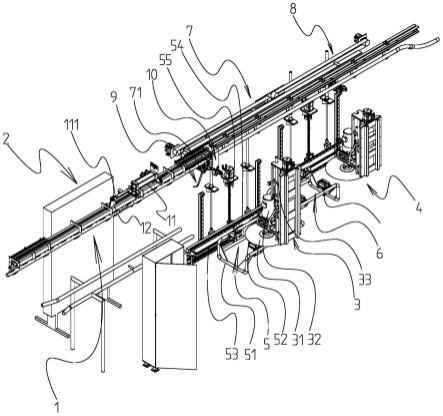
38.图1是本发明的整体结构示意图;
39.图2是悬挂输送线结构示意图;
40.图3是第一分割装置、第二分割装置结构示意图;
41.图4是本发明的整体结构左视图;
42.图5是第一分割装置、第二分割装置结构俯视图;
43.图6是定位装置结构立体图;
44.图7是定位装置结构示意图。
具体实施方式
45.为使本技术的目的、技术方案和优点更加清楚,下面将结合实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部实施例。基于已给出的实施例,本领域普通技术人员在未做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
46.在本技术的描述中,需要理解的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
47.在本技术的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。
48.一种猪胴体在线分割系统,包括
49.悬挂输送线1,猪胴体挂钩组件9借助悬挂输线1间歇或连续的运动;猪胴体悬挂于所述猪胴体挂钩组件9上。具体的,悬挂输送线1包括间歇驱动装置,其带动猪胴体挂钩组件9间歇性的移动,间歇驱动装置包括气缸11、拖板13以及推指132,气缸11的输出端固定连接于连接件12,连接件12固设于所述拖板13上,由气缸11带动拖板13往复运动;推指132沿拖板13延伸方向均布,每个推指132一端铰接于拖板13上,每个推指132与拖板13的铰接端设置有限位部131,限位部131使推指132仅能绕其铰接轴逆时针的设定范围内转动,结合图2,在气缸11带动拖板13向左移动时面对图纸的方向,左手侧为左,右手侧为右,由于限位部131的作用,推指132与猪胴体挂钩组件9接触后,推指132会逆时针转动,从而推指132从猪胴体挂钩组件9上滑过,当气缸11带动拖板13向右移动时,推指132不能顺时针转动,于是便推动猪胴体挂钩组件9向右移动一段距离也就是沿悬挂输送线1移动的距离,随后继续带动拖板13向左移动由此循环,实现猪胴体挂钩组件9间歇移动,气缸向左移动到最大行程所需的时间即为间歇时间;需要说明的限位部131可以优选为棘轮的远离,由此实现单向移动。悬挂输送线1包括至少一连续管轨14,管轨14向后端延伸,猪胴体挂钩组件9滑动设置于所述管轨14上。进一步的,本实施方式中优选猪胴体挂钩组件包括挂钩91、连接板92以及滚轮93,挂钩91连接于连接板92上,滚轮93活动设置于连接板92,且滚轮93与管轨14的上半周接触,优选管轨14截面为圆形。
50.图像采集装置2,在猪胴体挂钩组件9间歇或连续运动时,对猪胴体进行图像采集;并由采集的图像分析处理确定出第一分割位置以及第二分割位置;具体的,本实施方式优选图像采集装置2在间歇驱动装置间歇期间对悬挂于猪胴体挂钩组件9上的猪胴体进行图像采集。本实施方式优选图像采集装置2包括相机单元以及光源,通过相机单元对猪胴体进行图像采集,光源对光线进行补充,提高图像质量,当然本技术中还包括工控机,采集的图像借由工控机对其进行分析处理,从而根据预设的参数提取出第一分割位置和第二分割位置,从而输出响应的第一分割位置参数和第二分割位置参数。还可以优选图像采集装置2为ct扫描或断层扫描的方式获取相应的图像或影像信息,然后通过工控机对其进行分析处
理,从而获得第一分割位置参数和第二分割位置参数;需要说明的是,具体的图像影像采集以及分析处理方法以及设计的软件代码均为现有技术,详见申请号为cn202110994442.2的基于机器学习的生猪胴体分割方法,通过利用断层扫描技术对生猪胴体进行扫描后得到骨骼、肌肉、脂肪的相关数据后,人工设计分割路径,通过神经网络算法进行机器学习后得到可以根据骨骼、肌肉、脂肪的特征参数自动生成机械臂分割路径的模型;将训练得到的模型利用到生猪胴体分割工艺中,根据不同的生猪胴体参数生成机械臂分割路径,供机械臂对生猪胴体进行分割,从而实现对生猪胴体分割的自动化,提高分割效率,降低分割成本,这里不再赘述;此外,还需要补充说明的是,本实施方式中仅列举了第一分割位置和第二分割位置,还可以根据实际的需要增加多个分割位置。
51.第一悬挂拖动装置7,位于悬挂输送线1的驱动结束端,带动猪胴体挂钩组件9继续向后端移动;本实施方式中优选第一悬挂拖动装置7包括第一夹爪71以及第一往复拖动机构,第一夹爪71固设于直线往复驱动机构的输出端,第一夹爪71夹持猪胴体挂钩组件9后,借助第一往复拖动机构带动猪胴体挂钩组件9向第二悬挂拖动装置8移动。本实施方式中优选第一往复拖动机构包括第一伺服电机72、第一同步带系统73以及第一支撑板74,第一夹爪71固设于第一支撑板74上,第一支撑板74固设于第一同步带系统73的同步带上,第一伺服驱动电机72为第一同步带系统73提供动力,通过第一伺服电机72驱动第一同步带系统73运动,便可以实现带动第一支撑板74传动第一夹爪71按照设定速度、沿设定方向移动设定距离。
52.定位装置10,位于悬挂输送线1的驱动结束端;在猪胴体挂钩组件9移出悬挂输送线1的驱动结束端后,定位装置10将猪胴体挂钩组件9定位,第一悬挂拖动装置7由定位装置10定位的位置为起点,拖动猪胴体挂钩组件9向第二悬挂拖动装置8所在位置移动。定位装置10包括定位气缸101、传感器组件以及定位钳102,定位钳102固设于定位气缸101的活塞杆上,传感器组件可被猪胴体挂钩组件9触发,以使定位气缸101带动定位钳102向猪胴体挂钩组件9定位。定位钳102具有开口为v形的钳口,定位后,连接板92接纳于钳口内;传感器组件包括触发杆103、杠杆105、触发块106、传感器107以及杠杆轴108,触发杆103与管轨14平行设置,触发杆103两端向背离管轨14所在方向弯折,触发杆103固设于杠杆105的一端,杠杆105绕杠杆轴108转动,远离触发杆103的一端固设于触发块106;猪胴体挂钩组件9沿管轨14滑动过程中,连接板92推动触发杆13向远离管轨14所在方向移动,经由杠杆15带动触发块106将传感器107触发,在传感器107触发后,定位气缸101带动定位钳102前移卡主连接板92,实现将猪胴体挂钩组件9定位固定,随后第一夹爪71将挂钩91夹持,由此在第一往复拖动机构运动的时候便可以拖动猪胴体挂钩组件9沿管轨移动。
53.第二悬挂拖动装置8,位于第一悬挂拖动装置7的后端,接替第一悬挂拖动装置7带动猪胴体挂钩组件9继续向后端移动;本实施方式中,第二悬挂拖动装置8与第一悬挂拖动装置7的工作原理以及结构相同,这里不再赘述。
54.第一稳定装置5,位于悬挂输送线1的下方;第一稳定装置5可将猪胴体远离猪胴体挂钩组件9的一端固定,且与第一悬挂拖动装置7同步水平移动;本实施方式中具体的,第一稳定装置5包括第一夹持机构52、第一夹持竖直调节机构55以及第一夹持水平运动机构54,第一夹持水平运动机构54固设于第一夹持竖直调节机构55的输出端,第一夹持机构52固设于第一夹持水平运动机构54的输出端;第一夹持竖直调节机构55根据第一分割位置对第一
夹持机构52的竖直位置进行调节,第一夹持水平运动机构54带动第一夹持机构52与第一悬挂拖动装置7同步移动。优选还包括第一稳定架51,第一夹持机构52对称的固设于第一稳定架51,第一稳定架51固设于第一夹持水平运动机构54。第一夹持机构52包括第一夹持气缸521和第一仿形夹522,相对设置的第一夹持机构52的第一仿形夹522在第一夹持气缸521的带动下相向运动,将猪胴体夹持。还包括对称设置的第一稳定架缓冲气缸56,所第一稳定架缓冲气缸56一端固设于第一稳定架51,另一端固设于机架。具体的,在工控机根据获取的第一分割位置参数控制第一夹持竖直调节机构55带动第一夹持水平运动机构54以及第一夹持机构52移动到对应的高度,在第一夹爪71将挂钩91夹持的同时或延迟设定时长后,第一夹持机构52将猪胴体原理挂钩91的一端夹持,并且第一夹持水平运动机构54将与第一悬挂拖动装置7同步向第二悬挂拖动装置8移动。
55.第二稳定装置6,位于悬挂输送线1的下方且位于第一稳定装置5的后端;第一稳定装置5可将猪胴体远离猪胴体挂钩组件9的一端固定,且与第二悬挂拖动装置8同步水平移动;本实施方式中,第二稳定装置6与第一稳定装置5的工作原理以及结构相同,这里不再赘述。在第一悬挂拖动装置7和第一稳定装置5移动至其极限位置时,第一悬挂拖动装置7和第一稳定装置5将挂钩91释放,返回定位装置10所在位置;第二悬挂拖动装置8和第二稳定装置6移动至猪胴体所在位置,并将其夹持,带动其向后移动。
56.第一分割装置3,可根据确定出的第一分割位置进行适应性的高度调整,在第一悬挂拖动装置7和第一稳定装置5拖动猪胴体挂钩组件9向后端移动过程中,对猪胴体的第一分割位置进行切割分离;本实施方式中具体的,第一分割装置3包括第一分割刀具31、第一分割电机32以及第一分割高度调节组件33,第一分割刀具31固设于第一分割电机32的动力输出端,第一分割电机32固设于第一分割高度调节组件33的调节端,在第一悬挂拖动装置7和第一稳定装置5带动猪胴体移动过程中,第一分割刀具31的高速旋转,即可实现对猪胴体第一分割位置进行分割,由于第一稳定架51的设置为中空的架体,那么分割出来的部分在第一夹持机构52释放后,便会受自重作用下落,可以在其下方设置输送带,将其输送到指定位置;第一分割刀具31的切割面与水平面平行,借由第一分割高度调节组件33带动第一分割刀具31的水平高度,实现对第一分割位置的确定。第一分割高度调节组件33包括伺服电机以及滚珠丝杆螺母副,从而通过工控机的信号对其高度进行控制。
57.第二分割装置4,可根据确定出的第二分割位置进行适应性的高度调整,在第二悬挂拖动装置8和第二稳定装置6拖动猪胴体挂钩组件9向后端移动过程中,对猪胴体的第二分割位置进行切割分离;本实施方式中,第二分割装置4具体的结构和工作原理与第一分割装置3相同,这里不再赘述。
58.由上述可知,悬挂输送线1上的猪胴体悬挂组件9上悬挂的猪胴体根据图像采集装置2获取其图像或影像信息,然后工控机对上述装置进行适应性的调节,从而实现对猪胴体的所需位置进行自动化切割,克服了现有技术中猪胴体的分割问题。
59.上述实施例仅为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。