1.本发明涉及一种用于操作手持式机床的方法,所述手持式机床包含可与从动轴操作连接(确切地说,可旋转地)的工具,且涉及用于执行这种方法的手持式机床。
背景技术:
2.在使用机床,例如圆锯等时,存在以下风险:机床在不利操作条件下操作,且设计为例如锯片的工具堵塞在待加工的工件中。这可能损坏工具和/或工件。另外,机床可在不利操作条件下在非所要操作点处操作。
技术实现要素:
3.因此,本发明的目标为提供一种用于操作手持式机床的方法,借助于所述方法,可以简单的方式实现手持式机床接近于最优操作点的方法操作,且明确地说,可在所有操作条件下可靠地防止对以操作方式连接到机床的工具的损坏。另外,本发明的目标为提供一种用于执行这种方法的机床。
4.因此,所述目标通过一种用于操作手持式机床的方法来实现,所述手持式机床包含可旋转地与从动轴操作连接的工具,所述机床具有用于致动从动轴的驱动装置、用于致动驱动装置的控制装置和以操作方式连接到控制装置的至少一个传感器装置。
5.根据本发明,所述方法具有以下方法步骤:-使用至少一个传感器装置确定机床在进料方向上的进料速率的值;-确定从动轴的速度值;-基于从动轴的速度值和进料速率的值而借助于控制装置确定输出值;以及-基于所确定的输出值而借助于控制装置以预定义方式控制输出装置和/或以预定义方式控制驱动装置。
6.根据本发明,借助于用于操作机床的方法的实施例,手持式机床可以简单的方式至少接近最优操作点操作,且可在所有操作条件下可靠地防止对以操作方式连接到机床的工具的损坏。这通过根据速度值和进料速率的值所确定的机床的当前操作条件,且通过控制装置借助于输出装置的预定义控制和到用户的相关联信息传送或通过驱动装置的预定义控制而对非所要或不利操作条件作出响应来实现。如果存在不利操作条件,那么机床可通过来自用户的对应响应或通过驱动装置的对应控制而借助于来自用户的信息从不利操作条件快速转换为有利操作条件。确切地说,可因此可靠地防止对待加工的工具和/或工件的损坏。
7.手持式机床可包括两个包含以旋转运动驱动的工具的机床,例如锯床,特别是圆锯、钻孔机、磨床等,或一个包含以不同方式驱动的工具的机床,例如线锯等。
8.从动轴的速度值可例如使用与从动轴相互作用的传感器装置,特别是角度传感器,例如借助于与磁盘相互作用的霍尔传感器,或通过评估电机电流来确定。
9.还可能确定手持式机床的当前进料方向,这任选地由控制装置使用以确定输出
值。
10.在根据本发明的方法的有利实施例中,确定由驱动装置消耗的电力,控制装置考虑由驱动装置消耗的电力而确定输出值。借助于这种方法,可特别精确地确定当前操作条件,其结果是可特别可靠地防止对工具或工件的损坏。
11.为了从所确定的值产生输出值,控制装置可基于存储在控制装置中的查找表而确定输出值。替代地或另外,可由控制装置通过将存储在控制装置中的算法应用于所确定的速度值和进料速率的值而确定输出值。
12.如果在限定时间段内从进料速率值确定平均速率值,且此由控制装置使用以确定输出值,那么有可能以特别精确且正确的方式区分有利操作条件与不利操作条件。确切地说,可通过使用速率值的滑动平均值滤波器来确定平均速率值。
13.有可能借助于输出装置输出光学、声学和/或触觉信号,所述输出信号取决于由控制装置所确定的输出值。举例来说,可经由输出装置将彩色代码显示给用户,例如对应于有利操作条件的绿色显示和对应于不利操作条件的红色显示。用户还可经由输出装置被告知进料速率是太低、具有有利值还是太高。
14.为了能够特别可靠地防止对工具和/或工件的损坏,在根据本发明的方法的有利实施例中,控制装置可根据所确定的输出值控制和/或调节驱动装置。举例来说,根据所确定的输出值调节或控制驱动装置的电力输出,使得例如根据用途增加或减小从动轴的速度。
15.举例来说,进料速率的至少一个阈值、从动轴速度的至少一个阈值和驱动装置所消耗的电力的至少一个阈值可存储在控制装置中,以便尽可能精确地在机床的有利操作条件与不利操作条件之间进行区分。
16.其中进料速率的值大于对应阈值、从动轴的速度值大于对应阈值且驱动装置所消耗的电力大于对应阈值的操作条件可例如定义为有利操作条件,使得不需要改变。
17.其中进料速率的值小于对应阈值、从动轴的速度值大于对应阈值且驱动装置所消耗的电力小于对应阈值的操作条件可例如定义为不利操作条件,其可例如通过增加进料速率或通过减小从动轴的速度而转换为有利操作条件。
18.其中进料速率的值小于对应阈值、从动轴的速度值小于对应阈值且驱动装置所消耗的电力大于对应阈值的操作条件可例如定义为不利操作条件,其可例如通过减小机床的进料速率或通过增加从动轴的速度而转换为有利操作条件。
19.通过借助于控制装置或借助于用户对驱动装置的对应控制,可自动地改变当前操作条件,控制装置借助于输出装置向用户提供关于当前操作条件和/或待采取的措施的信息。
20.在根据本发明的方法的有利实施例中,至少一个传感器装置可确定三个空间方向中的每一个上的线性加速度值,通过在消除因重力引起的加速度之后对线性加速度值进行积分而确定机床的进料速率。以此方式,可简单地且精确地确定进料速率且优选地还确定进料方向。除线性加速度值之外,还可借助于传感器装置或借助于另一传感器装置来确定旋转速率值。以此方式,还可在远离传感器装置的点(例如,工具的旋转轴)处确定可发生的机床的任何旋转及其对进料移动的影响。
21.所述目标还通过一种用于执行上文更详细描述的方法的手持式机床来实现,所述
手持式机床包含可与从动轴操作连接的工具,所述机床具有用于致动从动轴的驱动装置、用于致动驱动装置的控制装置和以操作方式连接到控制装置的至少一个传感器装置。
22.针对根据本发明的方法阐述的优点也相应地适用于根据本发明设计的机床。利用根据本发明设计的手持式机床,因此有可能以简单且可靠的方式区分有利操作条件与不利操作条件,确切地说,有可能在所有操作条件下可靠地防止对以操作方式连接到机床的工具的损坏。
23.确切地说,手持式机床为一种以基本线性进料移动操作的机床,例如锯床、圆锯、线锯、钻孔机等。然而,原则上,其还可包括以非线性进料移动的机床,例如线锯、磨床等。
附图说明
24.可在图式的以下描述中发现另外的优点。在图式中展示本发明的实施例。图式、描述和权利要求书含有大量组合的特征。本领域的技术人员还将方便地单独考虑这些特征且将这些特征组合以形成有意义的另外的组合。
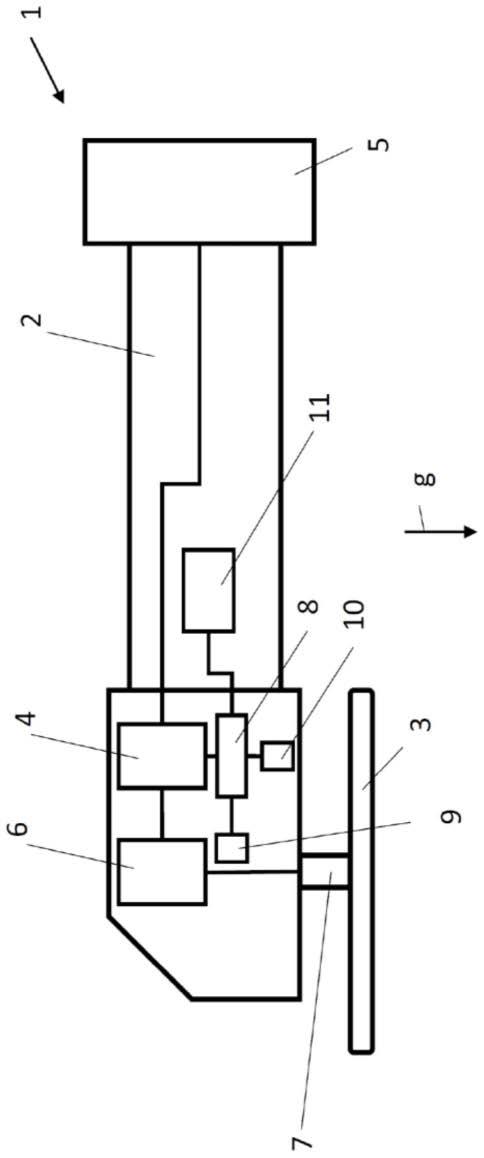
24.图式中唯一的图展示手持式机床的极为简化的侧视图,所述手持式机床此处被设计为角磨机,工具布置在角磨机的从动轴上。
具体实施方式
25.所述图展示根据本发明的在所展示说明中被设计为角磨机的手持式机床1。手持式机床1应理解为意味着可由用户在空间中基本上自由移动的机床。
26.根据替代实施例,手持式机床1也可设计为以特别专门的线性进料移动操作的机床,此为例如锯床,尤其是圆锯、钻孔机等。
27.在当前情况中设计为角磨机的手持式机床1具有外壳2和例如设计为切割盘的工具3。外壳2优选地具有至少一个固持区,在所述固持区处用户可使用一只手或两只手固持和引导机床1。工具3可由尤其设计为电动机的驱动器或驱动器装置4致动,所述驱动器可尤其借助于可连接到手持式机床1的蓄电池5而供应有电流。根据替代实施例(图中未展示),手持式机床1也可借助于电力电缆从网络供应有电流。
28.用于以旋转移动致动工具3的驱动器4连同传输装置6和从动轴7一起布置在外壳2内部。例如设计为电动机的驱动器4、传输装置6和从动轴7相对于彼此布置在外壳2中,且以使得由电动机4产生的转矩可传输到传输装置6且最终传输到从动轴7的方式互连。从外壳2向下突出的从动轴7的自由旋转端例如经由夹持装置(未详细展示)连接到此处设计为切割盘3的工具。从动轴7的转矩可因此传输到切割盘3。
29.在本发明的替代实施例中,还有可能工具不由驱动装置以旋转移动驱动,而是例如以线性、摆动或组合移动等驱动,确切地说,将从动轴的旋转转换为工具的对应移动。
30.手持式机床1还具有控制装置8,且在当前情况中具有两个传感器装置9和10。传感器装置9和10电和电子地连接到控制装置8。可在传感器装置9和10与控制装置8之间发送信号。控制装置8继而电和电子地连接到电动机4和蓄电池5。可在传感器装置9和10与电动机4和蓄电池5之间发送信号。控制装置8尤其用于控制和调节驱动器4且向手持式机床1供应电力。
31.在当前情况中,第一传感器装置9经设计以确定从动轴7的速度且设计例如为角度
传感器。将由第一传感器装置9所确定的从动轴7的速度值从第一传感器装置9传输到控制装置8。替代地,还有可能通过评估电动机4的电机电流来确定从动轴7的速度值。
32.在当前情况中,第二传感器装置10设计为陀螺仪传感器,借助于所述陀螺仪传感器可在三个空间轴上确定线性加速度值。将由第二传感器装置10所确定的线性加速度值从第二传感器装置10传输到控制装置8。
33.控制装置8经设计以从所确定的线性加速度值中减去作用于机床1的重力加速度g,使得确定由重力加速度校正的线性加速度值。根据这些校正的线性加速度值,可通过积分在空间轴上确定速率值。继而可根据这些速率值确定具有对应移动速率的机床1的移动方向。
34.此外,可确定由驱动装置4所消耗的电力。
35.查找表存储在控制装置8中,借助于所述查找表,基于在每一情况下所确定的当前值而评估机床1的当前操作条件。为此目的,使用机床1的移动速率(即,机床1的进料速率)、由第一传感器装置9所确定的从动轴7的速度值和由驱动装置4所消耗的电力。
36.控制装置8因此确定所要操作条件或非所要操作条件是否存在。当确定所要操作条件时,不需要采取措施,且机床1的操作可继续不变。在当前情况中,控制装置8经由输出装置向用户提供反馈,所述输出装置此处设计为显示装置11,显示装置11例如出于此目的而输出绿色。
37.相比而言,如果控制装置8使用查找表以确定存在非所要操作条件,且例如与从动轴7的当前速度值和驱动装置7的当前电力消耗相比,进料速率过低或过高,那么控制装置8以使得用户可看到与其它值相比当前过低或过高的进料速率的方式来控制显示装置11。这可例如通过色标传送。当前进料速率与其它值相比的位置还可在刻度上显示给用户,其中过低的进料速率的范围、有利进料速率的范围和过高的进料速率的范围各自表达为其它当前值的比例。
38.除光学输出之外,输出装置还可设计用于声学、触觉或组合输出。
39.算法还可存储在控制装置8中,所述算法基于所记录的或所计算的进料速率的输入值、从动轴7的速度值和驱动装置7的电力消耗来确定当前操作条件。
40.作为对输出装置11的控制的替代或补充,控制装置8还可基于机床1的所确定的操作条件相应地控制或调节驱动装置8,以便在存在非所要操作条件时再次实现所要操作条件。
41.为了定义所要操作条件和非所要操作条件,可在控制装置8中例如为进料速率的值、从动轴7的值和驱动装置4的电力消耗提供至少一个阈值,在对于相对于相应阈值的当前值的某些组合存在所要或非所要操作条件时,例如基于存储在控制装置8中的矩阵来确定所述阈值。
42.因此,举例来说,如果进料速率的当前值大于对应阈值,从动轴7的当前速度值大于对应阈值,且驱动装置4当前所消耗的电力大于对应阈值,那么可确定所要操作条件。在此操作条件下存在有利的操作点。
43.可将其中进料速率的当前值小于对应阈值、从动轴7的当前速度值大于对应阈值且驱动装置4当前所消耗的电力小于对应阈值的操作条件定义为例如不利操作条件。也可例如通过增加机床1的进料速率而退出此不利操作条件,此信息有可能经由输出装置11而
传送给用户。替代地,控制装置8可以使得从动轴7的速度减小的方式控制或调节驱动装置4。
44.可将其中进料速率的当前值小于对应阈值、从动轴的当前速度值小于对应阈值且驱动装置4当前所消耗的电力大于对应阈值的操作条件定义为例如不利操作条件。可例如通过减小机床1的进料速率而退出此不利操作条件,此信息有可能经由输出装置11而传送给用户。替代地,控制装置8可以使得从动轴7的速度增加的方式控制或调节驱动装置4。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
