远程辅助系统、车载装置、远程辅助方法以及远程辅助程序
1.相关申请的交叉引用
2.本技术基于在2019年10月22日申请的日本技术号2019-192349号,此处引用其记载内容。
技术领域
3.本公开涉及远程辅助系统、车载装置、远程辅助方法以及远程辅助程序。
背景技术:
4.例如,在专利文献1中记载了自动驾驶辅助中心与自动驾驶车辆定期通信从而监视自动驾驶车辆的车辆状态的远程监视系统。根据该远程辅助系统,自动驾驶车辆在与自动驾驶辅助中心的通信中断的情况下,自动停止,对自动驾驶辅助中心发送车辆停止信号以及相机影像。在自动驾驶辅助中心,确认相机影像并确认是否可以重新开始自动驾驶。自动驾驶车辆若从自动驾驶辅助中心接收到起步信号,则重新开始自动驾驶。
5.专利文献1:日本特开2019-87015号公报。
6.另外,根据自动驾驶车辆的通信状态以及环境状态,有时可实施的远程辅助受到限制。例如,在通信状态不稳定、产生影像的延迟的情况下,难以进行“在十字路口的右转的支持”等那样的时机控制。因此,在这样的情况下,优选限制时机控制。在上述专利文献1所记载的技术中,能够进行自动驾驶车辆的远程辅助。然而,如上述那样,没有考虑根据自动驾驶车辆的通信状态以及环境状态,限制能够实施的远程辅助。
技术实现要素:
7.本公开的目的在于提供能够根据自动驾驶车辆的通信状态以及环境状态,适当地进行对自动驾驶车辆的远程辅助的远程辅助系统、车载装置、远程辅助方法以及远程辅助程序。
8.本公开的第一方式所涉及的远程辅助系统具备:获取部,获取管理信息,上述管理信息管理在自动驾驶辅助中心的管理对象区域内的自动驾驶车辆能够行驶的多个地点的上述自动驾驶辅助中心与在上述自动驾驶车辆之间的通信状态以及上述管理对象区域内的上述自动驾驶车辆能够行驶的多个地点的上述自动驾驶车辆的周围的环境状态的至少一方;和执行部,基于根据上述管理信息得到的上述通信状态以及上述环境状态的至少一方,对进行针对上述自动驾驶车辆的远程辅助的操作员执行能够由上述操作员实施的远程辅助的限制所需的动作。
9.本公开的第二方式所涉及的车载装置是搭载于由第一方式所涉及的远程辅助系统进行远程辅助的自动驾驶车辆的车载装置,具备:接收部,接收上述管理信息;变更部,在基于上述管理信息,预测到本车辆将在与上述自动驾驶辅助中心的通信状态不稳定的位置停车的情况下,将本车辆的停车位置变更为与上述自动驾驶辅助中心的通信状态稳定的位置;以及发送部,从由上述变更部变更后的停车位置发送本车辆的辅助请求。
10.本公开的第三方式所涉及的远程辅助方法包括:获取管理信息,上述管理信息管理在自动驾驶辅助中心的管理对象区域内的自动驾驶车辆能够行驶的多个地点的上述自动驾驶辅助中心与上述自动驾驶车辆之间的通信状态以及在上述管理对象区域内的上述自动驾驶车辆能够行驶的多个地点的上述自动驾驶车辆的周围的环境状态的至少一方;基于根据上述管理信息得到的上述通信状态以及上述环境状态的至少一方,对进行针对上述自动驾驶车辆的远程辅助的操作员执行能够由上述操作员实施的远程辅助的限制所需的动作。
11.本公开的第四方式所涉及的远程辅助程序使计算机作为获取部以及执行部发挥功能,上述获取部获取管理信息,上述管理信息管理在自动驾驶辅助中心的管理对象区域内的自动驾驶车辆能够行驶的多个地点中的上述自动驾驶辅助中心与上述自动驾驶车辆之间的通信状态以及在上述管理对象区域内的上述自动驾驶车辆能够行驶的多个地点的上述自动驾驶车辆的周围的环境状态的至少一方,上述执行部基于根据上述管理信息得到的上述通信状态以及上述环境状态的至少一方,对进行针对上述自动驾驶车辆的远程辅助的操作员执行能够由上述操作员实施的远程辅助的限制所需的动作。
12.根据公开的技术,具有如下效果:能够根据自动驾驶车辆的通信状态以及环境状态,适当地进行对自动驾驶车辆的远程辅助。
附图说明
13.参照附图并通过下述的详细的描述,关于本公开的上述目的以及其它的目的、特征、优点变得更加明确。其附图如下述那样。
14.图1是表示第一实施方式的远程辅助系统的电结构的一个例子的图。
15.图2是表示第一实施方式的远程辅助系统的功能性结构的一个例子的框图。
16.图3是表示实施方式的操作员终端的ui画面的一个例子的主视图。
17.图4是表示实施方式的限制了一部分功能的状态的ui画面的一个例子的主视图。
18.图5是表示实施方式的测量信息的一个例子的图表。
19.图6是表示实施方式的操作员管理表的一个例子的图。
20.图7是表示由第一实施方式的远程辅助程序进行的处理的流程的一个例子的流程图。
21.图8是表示由第一实施方式的操作员侧控制程序进行的处理的流程的一个例子的流程图。
22.图9是表示由第一实施方式的车辆侧控制程序进行的处理的流程的一个例子的流程图。
23.图10是表示第二实施方式的远程辅助系统的功能性结构的一个例子的框图。
24.图11是用于说明从实施方式的服务器装置对自动驾驶车辆进行行驶的指示的情况下的处理的图。
25.图12是用于说明从实施方式的服务器装置对自动驾驶车辆进行行驶的指示的情况下的另一处理的图。
26.图13是用于说明从实施方式的服务器装置对自动驾驶车辆进行行驶的指示的情况下的又一处理的图。
27.图14是用于说明从实施方式的服务器装置对自动驾驶车辆进行行驶的指示的情况下的又一处理的图。
28.图15是表示由第二实施方式的远程辅助程序进行的处理的流程的一个例子的流程图。
29.图16是表示由第二实施方式的车辆侧控制程序进行的处理的流程的一个例子的流程图。
30.图17是表示第三实施方式的远程辅助系统的功能性结构的一个例子的框图。
31.图18的(a)是表示实施方式的自动驾驶车辆的变更前的停车位置的图。图18的(b)是表示实施方式的自动驾驶车辆的变更后的停车位置的图。
具体实施方式
32.以下,参照附图,对用于实施本公开的技术的方式的一个例子进行详细说明。
33.[第一实施方式]
[0034]
图1是表示第一实施方式的远程辅助系统90的电结构的一个例子的图。
[0035]
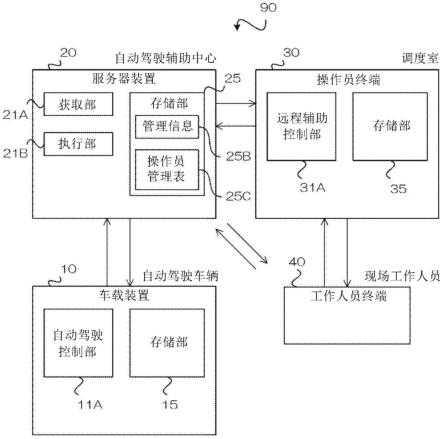
如图1所示,本实施方式的远程辅助系统90具备搭载于自动驾驶车辆的车载装置10、设置于自动驾驶辅助中心的服务器装置20、设置于调度室的操作员终端30以及现场工作人员可携带的工作人员终端40。此外,调度室可以处于自动驾驶辅助中心内,也可以处在与自动驾驶辅助中心不同的场所。
[0036]
车载装置10、服务器装置20、操作员终端30以及工作人员终端40经由网络n可通信地连接。在网络n中,作为一个例子,应用因特网、wan(wide area network:广域网)等。另外,车载装置10以及工作人员终端40分别经由无线通信与网络n连接。服务器装置20以及操作员终端30分别经由有线通信或无线通信与网络n连接。
[0037]
自动驾驶车辆是在规定的条件下能够不依赖于驾驶车辆的操作而自动行驶的车辆。车载装置10具备基于住所或纬度经度等目的地的信息,生成包括到目的地的行驶路线的行驶计划的功能以及控制本车辆的自动驾驶的功能。车载装置10具备cpu(central processing unit:中央处理器)11、存储器12、操作部13、显示部14、存储部15、传感器组16以及通信部17。
[0038]
cpu11是处理器的一个例子。这里所说的处理器是指广义的处理器,包括通用的处理器(例如,cpu)、专用的处理器(例如,gpu:graphics processing unit、asic:application specific integrated circuit、fpga:field programmable gate array、可编程逻辑设备等)。存储器12由rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)等构成。
[0039]
在存储部15中例如使用hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)、闪存等。在存储部15中存储有用于进行自动驾驶的控制的车辆侧控制程序15a。车辆侧控制程序15a例如也可以预先安装于车载装置10。车辆侧控制程序15a也可以通过存储于非易失性的非过渡性(non-transitory)记录介质,或者经由网络n分发,并适当地安装于车载装置10来实现。此外,作为非易失性的非过渡性记录介质的例子,假定有cd-rom(compact disc read only memory:只读光盘)、光磁盘、hdd、dvd-rom(digital versatile disc read only memory:数字多功能光盘只读存储器)、闪存、存储卡等。另外,
在存储部15中储存有自动驾驶的行驶计划的生成所需的地图信息。
[0040]
传感器组16由用于掌握本车辆的周围的状况的各种传感器构成。传感器组16包括拍摄车辆的规定方向的规定范围的多个相机、向车辆外部的规定范围发送探查波的毫米波雷达、至少扫描车辆前方的规定范围的lidar(light detection and ranging/laser imaging detection and ranging:激光雷达)。另外,在传感器组16中也可以包括搭载于本车辆的gps(global positioning system:全球定位系统)接收机。通过该gps接收机,获取本车辆的当前位置以及当前时刻等信息。
[0041]
操作部13构成为用于接受对车载装置10的操作输入的接口。在显示部14中例如使用液晶显示器(lcd:liquid crystal display)、有机el(electro luminescence:电致发光)显示器等。显示部14也可以一体地具有触摸面板。
[0042]
通信部17是与因特网、wan等网络n连接,用于与服务器装置20进行通信的通信接口。
[0043]
此外,车载装置10与自动驾驶所需的行驶装置(省略图示)连接,通过控制该行驶装置进行自动驾驶。在该行驶装置中,作为一个例子,包括电动动力转向装置、电子控制制动器、电子控制节气门等。
[0044]
车载装置10控制本车辆的驱动、转向操纵以及制动,以根据本车辆的行驶计划进行自动驾驶。此外,自动驾驶的方法本身存在各种公知的方法,在本实施方式中没有特别限定。
[0045]
服务器装置20通过与自动驾驶车辆的车载装置10定期通信来监视自动驾驶车辆的车辆状态,在从自动驾驶车辆有辅助请求的情况下,控制为对自动驾驶车辆进行远程辅助。在服务器装置20中,作为一个例子,应用服务器计算机、个人计算机(pc:personal computer)等通用的计算机装置。服务器装置20具备cpu21、存储器22、操作部23、显示部24、存储部25以及通信部26。
[0046]
cpu21是处理器的一个例子。这里所说的处理器如上述那样是指广义的处理器,包括通用的处理器、专用的处理器。存储器22由rom、ram等构成。
[0047]
在存储部25中例如使用hdd、ssd、闪存等。在存储部25中存储有用于进行自动驾驶车辆的远程辅助的远程辅助程序25a。远程辅助程序25a例如也可以预先安装于服务器装置20。远程辅助程序25a也可以通过存储于非易失性的非过渡性记录介质,或者经由网络n分发,并适当地安装于服务器装置20来实现。
[0048]
操作部23构成为用于接受对服务器装置20的操作输入的接口。在显示部24中例如使用液晶显示器(lcd)、有机el显示器等。显示部24也可以一体地具有触摸面板。
[0049]
通信部26是与因特网、wan等网络n连接,用于与车载装置10、操作员终端30以及工作人员终端40的各个进行通信的通信接口。
[0050]
操作员终端30例如构成为对自动驾驶车辆进行远程辅助的操作员所使用的专用终端。操作员终端30在从自动驾驶车辆有辅助请求的情况下,接受来自服务器装置20的操作员呼叫。操作员终端30与车载装置10进行通信,显示自动驾驶车辆的影像,并且根据操作员的操作进行远程辅助。操作员终端30具备cpu31、存储器32、操作部33、显示部34、存储部35以及通信部36。
[0051]
cpu31是处理器的一个例子。这里所说的处理器如上述那样是指广义的处理器,包
括通用的处理器、专用的处理器。存储器32由rom、ram等构成。
[0052]
在存储部35中例如使用hdd、ssd、闪存等。在存储部35中存储有操作员侧控制程序35a。操作员侧控制程序35a例如也可以预先安装于操作员终端30。操作员侧控制程序35a也可以通过存储于非易失性的非过渡性记录介质,或者经由网络n分发,并适当地安装于操作员终端30来实现。
[0053]
操作部33构成为用于接受对操作员终端30的操作输入的接口。在显示部34中例如使用液晶显示器(lcd)、有机el显示器等。显示部34也可以一体地具有触摸面板。
[0054]
通信部36是与因特网、wan等网络n连接,用于与服务器装置20以及工作人员终端40的各个进行通信的通信接口。此外,操作员终端30能够经由服务器装置20与车载装置10进行通信,但也可以不经由服务器装置20而与车载装置10直接通信。
[0055]
工作人员终端40构成为现场工作人员可携带的终端装置。此外,现场工作人员是指能够赶到并应对自动驾驶车辆的辅助担当者。在工作人员终端40中,作为一个例子,应用智能手机、平板终端等。工作人员终端40具备cpu41、存储器42、操作部43、显示部44、存储部45以及通信部46。
[0056]
此外,工作人员终端40能够与因特网、wan等网络n连接,与服务器装置20以及操作员终端30的各个进行通信。
[0057]
接下来,参照图2,对远程辅助系统90的功能性结构进行说明。
[0058]
图2是表示第一实施方式的远程辅助系统90的功能性结构的一个例子的框图。
[0059]
如图2所示,本实施方式的服务器装置20的cpu21作为获取部21a和执行部21b发挥功能。这些获取部21a和执行部21b通过cpu21读出远程辅助程序25a并执行来实现。
[0060]
另外,本实施方式的车载装置10的cpu11作为自动驾驶控制部11a发挥功能。该自动驾驶控制部11a通过cpu11读出车辆侧控制程序15a并执行来实现。
[0061]
另外,本实施方式的操作员终端30的cpu31作为远程辅助控制部31a发挥功能。该远程辅助控制部31a通过cpu31读出操作员侧控制程序35a并执行来实现。
[0062]
首先,对服务器装置20的功能性结构进行说明。
[0063]
在存储部25中存储有管理信息25b。在管理信息25b中包括基于自动驾驶辅助中心的管理对象区域内的自动驾驶车辆能够行驶的多个地点中的自动驾驶辅助中心与自动驾驶车辆之间的通信状态。该通信状态表示为与远程辅助的运行设计区域(odd:operational design domain)相关的信息。在该通信状态中,作为一个例子,包括区域、通信速度、通信延迟等。另外,在管理信息25b中也可以包括基于自动驾驶辅助中心的管理对象区域内的自动驾驶车辆能够行驶的多个地点中的自动驾驶车辆的周围的环境状态。该环境状态与上述通信状态同样,表示为与远程辅助的运行设计区域(odd)相关的信息。在该环境状态中,作为一个例子,包括道路曲率、死角等。管理信息25b是管理这些通信状态以及环境状态的至少一方的信息。
[0064]
另外,管理信息25b也可以包括与自动驾驶车辆的运行设计区域(odd)相关的信息。具体而言,在该信息中,作为一个例子,包括行路条件、道路形状、气象、路面状态、交通状况等。在行路条件中,作为一个例子,包括步车分离、铺装状态等。在道路形状中,作为一个例子,包括坡度、车道宽度等。在气象中,作为一个例子,包括雨、雪、风速等。在路面状态中,作为一个例子,包括冻结、淹水等。在交通状况中,作为一个例子,包括施工、事故、路上
停车等。
[0065]
另外,在存储部25中存储有后述的操作员管理表25c。
[0066]
获取部21a从存储部25获取管理信息25b。另外,获取部21a从自动驾驶车辆的车载装置10获取自动驾驶车辆的位置信息以及时刻信息。另外,获取部21a从自动驾驶车辆的车载装置10获取自动驾驶车辆的影像。此外,获取部21a所获取到的影像从服务器装置20被发送到操作员终端30。
[0067]
执行部21b基于根据管理信息25b得到的通信状态以及环境状态的至少一方,对进行针对自动驾驶车辆的远程辅助的操作员执行能够由操作员实施的远程辅助的限制所需的动作。具体而言,远程辅助的限制所需的动作是指对操作员通知通信状态以及环境状态的至少一方的异常的内容的动作。例如,在操作员终端30的ui(user interface:用户界面)画面上显示“产生通信延迟!”的消息。此外,在该通知中,也可以根据异常的内容,包含操作员接下来应采取的动作的提示。
[0068]
另外,远程辅助的限制所需的动作也可以是限制操作员所使用的操作员终端30所具有的远程辅助的功能的动作。例如,在操作员终端30的ui画面中,也可以使用于远程辅助的一部分按钮不可用(不可按压),或者使一部分按钮不显示(消隐)。此外,若突然进行该功能的限制,则操作员有可能混乱。因此,优选功能的限制例如在使“由于产生通信延迟,因此限制功能〇。”的消息显示之后执行。
[0069]
另外,执行部21b也可以在通信状态是产生了一定时间(例如1秒)以上的通信延迟的状态的情况下,限制控制远程辅助的定时的功能。执行部21b也可以在环境状态是施工区间长、前方视野不良、以及后方视野不良的任一状态的情况下,限制控制远程辅助的定时的功能。这里所说的定时,作为一个例子,包含超车时的逆向车道的逆向车或者邻接车道的后方车的安全确认的定时等。
[0070]
图3是表示本实施方式的操作员终端30的ui画面34a的一个例子的主视图。
[0071]
图3所示的ui画面34a是未进行功能限制的情况下的画面。在ui画面34a的中央显示自动驾驶车辆的多个影像(例如动画)。在图3的例子中,显示自动驾驶车辆的左前方、前方、右前方、左后方、车室内、以及右后方的影像。另外,在ui画面34a的下侧,作为用于远程辅助的多个按钮的一个例子,显示有车道变更[左]、允许超出超车、车道变更[右]、不需要辅助、以及辅助结束。车道变更[左]按钮是用于指示向左侧的车道的变更的按钮。允许超出超车按钮是用于指示从行驶车道超出超车的按钮。车道变更[右]按钮是用于指示向右侧的车道的变更的按钮。不需要辅助按钮是用于通知不需要远程辅助的按钮。辅助结束按钮是用于通知远程辅助的结束的按钮。
[0072]
另外,在ui画面34a的右下端显示有管理远程辅助的操作日志的“操作日志”。另外,在ui画面34a的右侧,作为根据需要而使用的多个按钮的一个例子,显示有车内通话、急救通报、警察通报、以及工作人员派遣。车内通话按钮是用于与自动驾驶车辆的乘员进行通话的按钮。急救通报按钮是用于进行119号通报的按钮。警察通报按钮是用于进行110号通报的按钮。工作人员派遣按钮是用于联络现场工作人员的按钮。
[0073]
图4是表示本实施方式的一部分功能被限制的状态的ui画面34a的一个例子的主视图。
[0074]
图4所示的ui画面34a表示在左前方的影像中产生通信延迟(例如1秒以上的延迟)
的状态。该情况下,优选限制向左侧的车道的变更。因此,在图4的例子中,在左前方的影像中显示“产生通信延迟!”的消息,并且,车道变更[左]按钮不可使用。
[0075]
另外,作为一个例子,执行部21b也可以基于图5所示的测量信息,设定限制远程辅助的功能的内容。该测量信息是管理信息25b所包含的信息。该测量信息是在一定期间内测量表示通信状态的指标而得到的信息。这里所说的表示通信状态的指标作为一个例子包括通信速度、通信延迟等。
[0076]
图5是表示本实施方式的测量信息的一个例子的图表。在图5中,纵轴表示通信延迟(t:时间),横轴表示时刻(t)。
[0077]
例如,若根据通信状态频繁切换功能限制的有效和无效,则有时操作员无法进行正确的判断。因此,如图5所示,测量一定期间的通信质量(在图5的例子中通信延迟),使用与通信质量差的一侧匹配的值来设定功能限制的内容。具体而言,在对于通信延迟为t1(秒),限制功能〇及功能
×
,对于通信延迟为t2秒(<t1秒),限制功能〇的情况下,根据通信质量差的一侧的t1秒,设定对于通信延迟为t2秒也限制功能〇及功能
×
的内容。
[0078]
另外,执行部21b也可以基于操作员的技能以及经验年数的至少一方,使限制远程辅助的功能的内容不同。该情况下,作为一个例子,使用图6所示的操作员管理表25c。
[0079]
图6是表示本实施方式的操作员管理表25c的一个例子的图。
[0080]
图6所示的操作员管理表25c是针对每个操作员,登记有技能、经验年数、以及功能限制的内容的表。如图6所示,技能(在图6的例子中等级1最高)越高的操作员,可以越减少被限制的功能,经验年数越长的操作员,可以越减少被限制的功能。
[0081]
另外,执行部21b也可以在通信状态是持续一定期间通信中断的状态、或者无法确保一定以上的通信频带的状态的情况下,代替操作员,对能够赶到应对自动驾驶车辆的现场工作人员进行指示。具体而言,对现场工作人员的指示通过在工作人员终端40的显示部44上显示消息等来进行。
[0082]
此外,本实施方式的获取部21a以及执行部21b设置于服务器装置20,但这些获取部21a以及执行部21b也可以设置于操作员终端30。
[0083]
接下来,对车载装置10以及操作员终端30的功能性结构进行说明。
[0084]
车载装置10的自动驾驶控制部11a进行本车辆的自动驾驶的控制。另外,自动驾驶控制部11a在从操作员接受到远程辅助的情况下,根据来自操作员终端30的远程辅助信号进行自动驾驶的控制。
[0085]
操作员终端30的远程辅助控制部31a进行自动驾驶车辆的远程辅助的控制。具体而言,远程辅助控制部31a在操作员进行远程辅助的情况下,对自动驾驶车辆发送远程辅助信号来进行远程辅助的控制。
[0086]
接下来,参照图7,对第一实施方式的服务器装置20的作用进行说明。
[0087]
图7是表示由第一实施方式的远程辅助程序25a进行的处理的流程的一个例子的流程图。
[0088]
首先,若对服务器装置20指示自动驾驶车辆的车辆状态的监视,则启动远程辅助程序25a,执行以下的各步骤。
[0089]
在图7的步骤100中,cpu21从自动驾驶车辆的车载装置10获取自动驾驶车辆的位置信息以及时刻信息。
[0090]
在步骤101中,cpu21从存储部25获取管理信息25b。
[0091]
在步骤102中,cpu21判定与自动驾驶车辆的通信状态是否为持续一定期间通信中断的状态。在判定为不是持续一定期间通信中断的状态的情况下(否定判定的情况),移至步骤103,在判定为持续一定期间通信中断的情况下(肯定判定的情况),移至步骤107。此外,在这里,判定是否是产生了持续一定期间通信中断的状态,但也可以判定是否是无法确保一定以上的通信频带的状态。也就是说,例如,在通过qos(quality of service:服务质量)等能够确保充分的通信频带的情况下,移至步骤103,在无法确保充分的通信频带的情况下,移至步骤107。
[0092]
在步骤103中,cpu21判定是否从自动驾驶车辆接收到辅助请求。在判定为从自动驾驶车辆接收到辅助请求的情况下(肯定判定的情况),移至步骤104,在判定为未从自动驾驶车辆接收到辅助请求的情况下(否定判定的情况),返回到步骤100,反复处理。
[0093]
在步骤104中,cpu21对操作员终端30进行操作员的呼叫。
[0094]
在步骤105中,cpu21判定是否需要远程辅助的限制。需要远程辅助的限制的情况基于管理信息25b来判定。在需要远程辅助的限制的情况中,作为一个例子,包括(1)预测到自动驾驶车辆在成本(后述)高的路线上行驶的情况、(2)自动驾驶车辆的影像产生一定时间(例如1秒)以上的通信延迟的情况、(3)预测到自动驾驶车辆将在前方视野或者后方视野不良的位置停车的情况、(4)预测到自动驾驶车辆将在与自动驾驶辅助中心的通信状态不稳定的位置停车的情况等。在判定为需要远程辅助的限制的情况下(肯定判定的情况),移至步骤106,在判定为不需要远程辅助的限制的情况下(否定判定的情况),移至步骤108。
[0095]
在步骤106中,cpu21对操作员终端30执行远程辅助的限制所需的动作,移至步骤108。所谓的远程辅助的限制所需的动作,作为一个例子,如上述的图4所示,是对操作员终端30显示通知通信状态以及环境状态的至少一方的异常的内容的消息的动作、或者是限制操作员终端30所具有的远程辅助的功能的动作。
[0096]
另一方面,在步骤107中,cpu21对现场工作人员携带的工作人员终端40指示进行对自动驾驶车辆的赶到应对,移至步骤108。作为一个例子,如上述那样,cpu21通过在工作人员终端40的显示部44上显示消息等进行指示。
[0097]
在步骤108中,cpu21判定远程辅助的结束定时是否到来。在判定为远程辅助的结束定时没有到来的情况下(否定判定的情况),返回到步骤100,反复处理,在判定为远程辅助的结束定时到来的情况下(肯定判定的情况),结束基于本远程辅助程序25a的一系列的处理。
[0098]
接下来,参照图8,对第一实施方式的操作员终端30的作用进行说明。
[0099]
图8是表示由第一实施方式的操作员侧控制程序35a进行的处理的流程的一个例子的流程图。
[0100]
在图8的步骤110中,cpu31判定是否从服务器装置20有操作员的呼叫。在判定为有操作员的呼叫的情况下(肯定判定的情况),移至步骤111,在判定为没有操作员的呼叫的情况下(否定判定的情况),在步骤110中待机。
[0101]
在步骤111中,cpu31对上述步骤110中的操作员呼叫进行响应。
[0102]
在步骤112中,cpu31判定是否从服务器装置20有表示通信状态以及环境状态的至少一方的异常的内容的通知。此外,在该通知中,如上述那样,也可以根据异常的内容,包含
操作员接下来应采取的动作的提示。在判定为有通知的情况下(肯定判定的情况),移至步骤113,在判定为没有通知的情况下(否定判定的情况),移至步骤116。
[0103]
在步骤113中,cpu31根据上述步骤112的通知,作为一个例子,将上述的图4所示的“产生通信延迟!”那样的消息显示为通知内容。
[0104]
在步骤114中,cpu31判定是否从服务器装置20有远程辅助的功能限制的指示。在判定为有远程辅助的功能限制的指示的情况下(肯定判定的情况),移至步骤115,在判定为没有远程辅助的功能限制的指示的情况下(否定判定的情况),移至步骤116。
[0105]
在步骤115中,cpu31根据上述步骤114的指示,作为一个例子,像上述的图4所示的“车道变更[左]按钮”那样,限制远程辅助的功能。
[0106]
时间
[0107]
在步骤116中,cpu31根据操作员的操作,对自动驾驶车辆执行远程辅助。
[0108]
在步骤117中,cpu31判定远程辅助的结束定时是否到来。在判定为远程辅助的结束定时没有到来的情况下(否定判定的情况),返回到步骤110,反复处理,在判定为远程辅助的结束定时到来的情况下(肯定判定的情况),结束基于本操作员侧控制程序35a的一系列的处理。
[0109]
接下来,参照图9,对第一实施方式的车载装置10的作用进行说明。
[0110]
图9是表示由第一实施方式的车辆侧控制程序15a进行的处理的流程的一个例子的流程图。
[0111]
在图9的步骤120中,cpu11对服务器装置20发送远程辅助的辅助请求。
[0112]
在步骤121中,cpu11判定针对在上述步骤120中发送的辅助请求,是否有来自操作员终端30的远程辅助。在判定为有来自操作员终端30的远程辅助的情况下(肯定判定的情况),移至步骤122,在判定为没有来自操作员终端30的远程辅助的情况下(否定判定的情况),移至步骤123。
[0113]
在步骤122中,cpu11根据来自操作员所使用的操作员终端30的远程辅助进行控制。
[0114]
在步骤123中,cpu11判定远程辅助的结束定时是否到来。在判定为远程辅助的结束定时没有到来的情况下(否定判定的情况),返回到步骤120,反复处理,在判定为远程辅助的结束定时到来的情况下(肯定判定的情况),结束基于本车辆侧控制程序15a的一系列的处理。
[0115]
这样,根据本实施方式,在针对来自自动驾驶车辆的辅助请求需要限制远程辅助的情况下,对操作员执行远程辅助的限制所需的动作。因此,能够防止操作员进行错误的远程辅助。
[0116]
[第二实施方式]
[0117]
在上述第一实施方式中,对在针对来自自动驾驶车辆的辅助请求需要限制远程辅助的情况下,对操作员执行远程辅助的限制所需的动作的方式进行了说明。与此相对,在本实施方式中,对在操作员难以应对的情况下,从自动驾驶辅助中心指示自动驾驶车辆的行驶的方式进行说明。
[0118]
图10是表示第二实施方式的远程辅助系统91的功能性结构的一个例子的框图。此外,对具有与在上述第一实施方式中说明的远程辅助系统90同样的功能的构成要素标注相
同的附图标记,省略其反复的说明。
[0119]
如图10所示,本实施方式的服务器装置20的cpu21作为指示部21c发挥功能。该指示部21c通过cpu21读出远程辅助程序25a并执行来实现。服务器装置20具备指示部21c这一点与上述第一实施方式的远程辅助系统90不同。
[0120]
指示部21c在操作员难以应对或者可能产生困难的状况的情况下,对自动驾驶车辆进行行驶的指示。在这里,远程辅助不是始终需要,在自动驾驶车辆单体无法应对的情况下需要。因此,在需要远程辅助的状况且远程辅助困难的情况下,会产生自动驾驶车辆抛锚等的问题。所谓的需要远程辅助的状况,作为一个例子,也有事先知晓地点起火的辅助、施工区间的旗语应对等的情况,另外,也有乘客的急救应对、因产生路上停车而引起的超出超车等突发性地在任意场所发生的情况。因此,优选进行避开远程辅助困难的风险高的(可能产生困难的状况)路线的指示。参照图11~图14,具体地说明对自动驾驶车辆进行行驶的指示的方式。此外,操作员难以应对或者可能产生困难的状况的情况(以下,统称为“操作员难以应对的情况”)基于管理信息25b来判定。在操作员难以应对的情况中,作为一个例子,包括(1)预测到自动驾驶车辆在成本高的路线上行驶的情况、(2)自动驾驶车辆的影像产生一定时间(例如1秒)以上的通信延迟的情况、(3)预测到自动驾驶车辆将在前方视野或者后方视野不良的位置停车的情况、(4)预测到自动驾驶车辆将在位置停车的情况等。
[0121]
图11是用于说明从本实施方式的服务器装置20对自动驾驶车辆进行行驶的指示的情况下的处理的图。
[0122]
在图11中,地点s表示自动驾驶车辆的出发地点,地点g表示自动驾驶车辆的目标地点。路线r1~r3表示连接地点s~地点g的多个路线。
[0123]
通信状态以及环境状态如上述那样表示为与远程辅助的运行设计区域相关的信息。管理信息25b包括与远程辅助的运行设计区域相关的信息、和与自动驾驶车辆的运行设计区域相关的信息。
[0124]
自动驾驶车辆能够行驶的多个路线的各个分配有反映与远程辅助的运行设计区域相关的信息以及与自动驾驶车辆的运行设计区域相关的信息的成本。具体而言,在图11中,“车道宽度窄”是与自动驾驶车辆的运行设计区域相关的信息的一个例子,“通信环境差”以及“后方有死角”是与远程辅助的运行设计区域相关的信息的一个例子。例如,对于“车道宽度窄”预先设定成本“3”,对于“通信环境差”预先设定成本“2”,对于“后方有死角”预先设定成本“2”。该情况下,路线r2包括“车道宽度窄”,因此被分配成本“3”。路线r3包括“通信环境差”以及“后方有死角”,因此被分配合计后的成本“4”。路线r1不包括与远程辅助的运行设计区域相关的信息以及与自动驾驶车辆的运行设计区域相关的信息,因此被分配成本“0”。
[0125]
指示部21c在预测到自动驾驶车辆将在成本为阈值以上的路线上行驶的情况下,进行将自动驾驶车辆行驶的路线变更为成本成为最小的路线的指示。具体而言,在图11的例子中,将阈值设为“3”,在预测到自动驾驶车辆将在路线r2上行驶的情况下,进行变更为成本成为最小的路线、即路线r1的指示。
[0126]
即,通过来自自动驾驶辅助中心的指示,能够将自动驾驶车辆行驶的路线变更为通信状态以及环境状态良好的路线。因此,在由操作员进行远程辅助的情况下,能够在通信状态以及环境状态良好的状态下进行。
[0127]
图12是用于说明从本实施方式的服务器装置20对自动驾驶车辆进行行驶的指示的情况下的另一处理的图。
[0128]
在图12中,地点s表示自动驾驶车辆的出发地点,地点g表示自动驾驶车辆的目标地点。路线r1~r3表示连接地点s~地点g的多个路线。“车道宽度窄”以及“施工区间”是与自动驾驶车辆的运行设计区域相关的信息的一个例子,“通信环境差”以及“后方有死角”是与远程辅助的运行设计区域相关的信息的一个例子。
[0129]
指示部21c在操作员监视的自动驾驶车辆的影像产生一定时间以上的通信延迟的情况下,进行使自动驾驶车辆的速度降低的指示。具体而言,在图12的例子中,假定自动驾驶车辆在路线r1上行驶的情况。路线r1包括“通信环境差”,是在该“通信环境差”的位置产生了1秒以上的通信延迟的状态。该情况下,使在路线r1上行驶的自动驾驶车辆的速度降低。
[0130]
即,通过来自自动驾驶辅助中心的指示,使自动驾驶车辆的速度降低,从而能够降低与逆向车的相对速度。因此,在由操作员进行远程辅助的情况下,能够在通信状态恢复的状态下进行。
[0131]
图13是用于说明从本实施方式的服务器装置20对自动驾驶车辆进行行驶的指示的情况下的又一处理的图。
[0132]
在图13中,地点s表示自动驾驶车辆的出发地点,地点g表示自动驾驶车辆的目标地点。路线r1~r3表示连接地点s~地点g的多个路线。“车道宽度窄”以及“施工区间”是与自动驾驶车辆的运行设计区域相关的信息的一个例子,“后方有死角”是与远程辅助的运行设计区域相关的信息的一个例子。
[0133]
指示部21c在预测到自动驾驶车辆将在后方视野不良的位置停车的情况下,进行将自动驾驶车辆的停车位置设定或者变更为自动驾驶车辆的后方视野良好的位置的指示。例如,在停车位置的设定比预测靠前的情况下(乘客的目的地等),进行变更,在停车位置的设定比预测靠后的情况下(乘客的急救应对等),进行新设定。具体而言,在图13的例子中,假定自动驾驶车辆在路线r1上暂时停车的情况。路线r1包括“后方有死角”,表示该“后方有死角”的停车位置(变更前)是后方视野不良的位置。在该停车位置(变更前),例如设定有来自乘客的希望停车地点、急救时的暂时停止地点等。在该停车位置(变更前),重新开始行驶时后方有死角,因此发车判断困难。该情况下,将自动驾驶车辆的停车位置从后方视野差的位置变更为后方视野良好的位置。此外,停车位置(变更后)表示后方视野良好的位置。
[0134]
即,通过来自自动驾驶辅助中心的指示,能够将自动驾驶车辆的停车位置从后方视野差的位置变更为后方视野良好的位置。因此,在由操作员进行远程辅助的情况下,能够进行重新开始行驶时的发车判断。
[0135]
图14是用于说明从本实施方式的服务器装置20对自动驾驶车辆进行行驶的指示的情况下的又一处理的图。
[0136]
在图14中,地点s表示自动驾驶车辆的出发地点,地点g表示自动驾驶车辆的目标地点。路线r1~r3表示连接地点s~地点g的多个路线。“车道宽度窄”以及“施工区间”是与自动驾驶车辆的运行设计区域相关的信息的一个例子,“有大型停车车辆”以及“后方有死角”是与远程辅助的运行设计区域相关的信息的一个例子。
[0137]
指示部21c在预测到自动驾驶车辆将在前方视野不良的位置停车的情况下,进行
将自动驾驶车辆的停车位置设定或者变更为自动驾驶车辆的前方视野良好的位置的指示。具体而言,在图14的例子中,假定自动驾驶车辆在路线r1上暂时停车的情况。路线r1包括“有大型停车车辆”,表示该“有大型停车车辆”的停车位置(变更前)由于大型停车车辆是前方视野不良的位置。该停车位置(变更前)例如设定大型停车车辆的跟前的位置。在该停车位置(变更前),无法掌握大型停车车辆的前方的状况,因此超车判断困难。该情况下,将自动驾驶车辆的停车位置从前方视野差的位置变更为前方视野良好的位置,在图14的例子中,变更为比停车位置(变更前)靠近前侧的位置。此外,停车位置(变更后)表示前方视野良好的位置。
[0138]
即,通过来自自动驾驶辅助中心的指示,能够将自动驾驶车辆的停车位置从前方视野差的位置变更为前方视野良好的位置。因此,在由操作员进行远程辅助的情况下,能够进行大型停车车辆等的超车判断。
[0139]
另外,指示部21c在预测到自动驾驶车辆将在与自动驾驶辅助中心的通信状态不稳定的位置停车的情况下,也可以进行将自动驾驶车辆的停车位置设定或者变更为与自动驾驶辅助中心的通信状态稳定的位置的指示。例如,如上述那样,在停车位置的设定比预测靠前的情况下(乘客的目的地等),进行变更,在停车位置的设定比预测靠后的情况下(乘客的急救应对等),进行新设定。具体而言,在上述的图12的例子中,假定自动驾驶车辆在路线r1上暂时停车的情况。路线r1包括“通信环境差”,是在该“通信环境差”的位置产生1秒以上的通信延迟的状态。该情况下,将自动驾驶车辆的停车位置从通信状态不稳定的位置变更为通信状态稳定的位置。
[0140]
即,通过来自自动驾驶辅助中心的指示,能够将自动驾驶车辆的停车位置从通信状态不稳定的位置变更为通信状态稳定的位置。因此,在由操作员进行远程辅助的情况下,能够在通信状态稳定的状态下进行。
[0141]
此外,该情况下,指示部21c也可以从通过来自自动驾驶辅助中心的指示而变更后的停车位置接受自动驾驶车辆的辅助请求。由此,能够可靠地接收辅助请求。
[0142]
接下来,参照图15,对第二实施方式的服务器装置20的作用进行说明。
[0143]
图15是表示由第二实施方式的远程辅助程序25a进行的处理的流程的一个例子的流程图。
[0144]
首先,若对服务器装置20指示自动驾驶车辆的车辆状态的监视,则启动远程辅助程序25a,执行以下的各步骤。
[0145]
在图15的步骤130中,cpu21从自动驾驶车辆的车载装置10获取自动驾驶车辆的位置信息以及时刻信息。
[0146]
在步骤131中,cpu21从存储部25获取管理信息25b。
[0147]
在步骤132中,cpu21判定与自动驾驶车辆的通信状态是否是持续一定期间通信中断的状态。在判定为不是持续一定期间通信中断的状态的情况下(否定判定的情况),移至步骤133,在判定为持续一定期间通信中断的情况下(肯定判定的情况),移至步骤138。此外,判定是否是产生了持续一定期间通信中断的状态,但也可以判定是否是无法确保一定以上的通信频带的状态。
[0148]
在步骤133中,cpu21判定是否从自动驾驶车辆接收到辅助请求。在判定为从自动驾驶车辆接收到辅助请求的情况下(肯定判定的情况),移至步骤134,在判定为未从自动驾
驶车辆接收到辅助请求的情况下(否定判定的情况),返回到步骤130,反复处理。
[0149]
在步骤134中,cpu21判定操作员应对是否困难。操作员应对困难的情况如上述那样基于管理信息25b来判定。在判定为操作员应对不困难、即操作员能够应对的情况下(否定判定的情况),移至步骤135,在判定为操作员应对困难的情况下(肯定判定的情况),移至步骤139。
[0150]
在步骤135中,cpu21对操作员终端30进行操作员的呼叫。
[0151]
在步骤136中,cpu21判定是否需要远程辅助的限制。需要远程辅助的限制的情况如上述那样基于管理信息25b来判定。在判定为需要远程辅助的限制的情况下(肯定判定的情况),移至步骤137,在判定为不需要远程辅助的限制的情况下(否定判定的情况),移至步骤140。
[0152]
在步骤137中,cpu21对操作员终端30执行远程辅助的限制所需的动作,移至步骤140。所谓的远程辅助的限制所需的动作,作为一个例子,如上述的图4所示,是对操作员终端30显示通知通信状态以及环境状态的至少一方的异常的内容的消息的动作、或者限制操作员终端30所具有的远程辅助的功能的动作。
[0153]
另一方面,在步骤138中,cpu21对现场工作人员携带的工作人员终端40指示进行对自动驾驶车辆的赶到应对,移至步骤140。作为一个例子,如上述那样,cpu21通过在工作人员终端40的显示部44上显示消息等来进行指示。
[0154]
另一方面,在步骤139中,作为一个例子,如上述的图11~图14所示,cpu21对自动驾驶车辆进行行驶的指示,返回到步骤134,反复处理。
[0155]
在步骤140中,cpu21判定远程辅助的结束定时是否到来。在判定为远程辅助的结束定时没有到来的情况下(否定判定的情况),返回到步骤130,反复处理,在判定为远程辅助的结束定时到来的情况下(肯定判定的情况),结束基于本远程辅助程序25a的一系列的处理。
[0156]
接下来,参照图16,对第二实施方式的车载装置10的作用进行说明。
[0157]
图16是表示由第二实施方式的车辆侧控制程序15a进行的处理的流程的一个例子的流程图。
[0158]
在图16的步骤150中,cpu11对服务器装置20发送远程辅助的辅助请求。
[0159]
在步骤151中,cpu11判定根据在上述步骤150中发送的辅助请求,是否从自动驾驶辅助中心的服务器装置20有行驶的指示。在判定为有行驶的指示的情况下(肯定判定的情况),移至步骤152,在判定为没有行驶的指示的情况下(否定判定的情况),移至步骤153。
[0160]
在步骤152中,cpu11根据来自自动驾驶辅助中心的服务器装置20的行驶指示进行控制。
[0161]
在步骤153中,cpu11判定是否从操作员所使用的操作员终端30有远程辅助。在判定为有远程辅助的情况下(肯定判定的情况),移至步骤154,在判定为没有远程辅助的情况下(否定判定的情况),移至步骤155。
[0162]
在步骤154中,cpu11根据来自操作员所使用的操作员终端30的远程辅助进行控制。
[0163]
在步骤155中,cpu21判定远程辅助的结束定时是否到来。在判定为远程辅助的结束定时没有到来的情况下(否定判定的情况),返回到步骤150,反复处理,在判定为远程辅
助的结束定时到来的情况下(肯定判定的情况),结束基于本车辆侧控制程序15a的一系列的处理。
[0164]
这样,根据本实施方式,在操作员难以应对的情况下,从自动驾驶辅助中心指示自动驾驶车辆的行驶。因此,即使是操作员难以应对的情况,也能够成为能够由操作员进行远程辅助的状态。
[0165]
[第三实施方式]
[0166]
在本实施方式中,对车载装置从自动驾驶辅助中心获取管理信息,并使用管理信息,使本车辆停在通信状态良好的场所的方式进行说明。
[0167]
图17是表示第三实施方式的远程辅助系统92的功能性结构的一个例子的框图。此外,对具有与在上述第二实施方式中说明的远程辅助系统91同样的功能的构成要素标注相同的附图标记,省略其反复的说明。
[0168]
如图17所示,本实施方式的车载装置10的cpu11作为接收部11b、变更部11c、以及发送部11d发挥功能。这些接收部11b、变更部11c、以及发送部11d通过cpu11读出车辆侧控制程序15a并执行来实现。
[0169]
接收部11b从服务器装置20接收管理信息25b。
[0170]
变更部11c在基于管理信息25b,预测到本车辆将在与自动驾驶辅助中心的通信状态不稳定的位置停车的情况下,将本车辆的停车位置变更为与自动驾驶辅助中心的通信状态稳定的位置。
[0171]
发送部11d从由变更部11c变更后的停车位置发送本车辆的辅助请求。
[0172]
图18的(a)是表示本实施方式的自动驾驶车辆的变更前的停车位置的图。图18的(b)是表示本实施方式的自动驾驶车辆的变更后的停车位置的图。在图18的(a)以及图18的(b)中,范围l1表示能够与自动驾驶辅助中心进行通信的范围,范围l2表示通信状态不稳定的范围。
[0173]
如图18的(a)所示,自动驾驶车辆的车载装置10基于管理信息25b,预测到本车辆在范围l2停车。该情况下,如图18的(b)所示,车载装置10变更本车辆的停车位置,以使本车辆包含于范围l1且在范围l2的近前处停车。而且,车载装置10从变更后的停车位置对自动驾驶辅助中心发送辅助请求。
[0174]
这样,根据本实施方式,使用从自动驾驶辅助中心获取到的管理信息,将自动驾驶车辆的停车位置变更到通信状态良好的位置,从变更后的停车位置发送辅助请求。因此,能够对自动驾驶辅助中心可靠地发送辅助请求。
[0175]
以上,例示并说明了实施方式的远程辅助系统。实施方式也可以是用于使计算机执行远程辅助系统所具备的各部的功能的程序的方式。实施方式也可以是存储有这些程序的计算机可读取的非过渡性记录介质的方式。
[0176]
另外,在上述实施方式中进行说明的远程辅助系统的结构是一个例子,也可以在不脱离主旨的范围内根据状况进行变更。
[0177]
另外,在上述实施方式中进行说明的程序的处理的流程也是一个例子,也可以在不脱离主旨的范围内删除不必要的步骤,或者追加新的步骤,或者置换处理顺序。
[0178]
另外,在上述实施方式中,对通过执行程序,利用计算机通过软件结构来实现实施方式的处理的情况进行了说明,但并不限于此。实施方式例如也可以通过硬件结构、硬件结
构和软件结构的组合来实现。
[0179]
本公开以实施方式为基准进行了描述,但应理解为本公开并不限定于该实施方式、结构。本公开也包含各种变形例、等同范围内的变形。其中,各种组合、方式,进一步仅包含它们中一个要素、一个以上、或一个以下的其它组合、方式也纳入到本公开的范畴、思想范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。