1.本发明涉及一种电动车辆的控制方法及电动车辆的控制装置。
背景技术:
2.在jp2015-133799a中,作为电动车辆的控制装置,公开了如下的控制装置:当加速器操作量减少或者变为零,并且电动车辆即将停车时,执行使电动机产生使车辆停止的扭矩的停止控制。
3.在上述的停止控制中,推定施加给电动机的干扰扭矩,进行使电动机产生的扭矩收敛于推定出的干扰扭矩的控制,由此,即使在有倾斜的道路上也能够使车辆停止。然而,由于上述的停止控制没有考虑在本车辆的前方存在前行车辆的可能性,所以例如根据前行车辆的减速度比本车辆大等前行车辆的状态有可能过于接近前行车辆。
技术实现要素:
4.本发明的目的在于提供一种技术,即使在本车辆的前方存在前行车辆的情况下,也能够与前行车辆的状态无关地将本车辆停止在适当的位置。
5.本发明的一方式中的电动车辆的控制方法是将电动机作为行驶驱动源,通过电动机的再生制动力进行减速的电动车辆的控制方法。该控制方法中,获取加速器操作量,推定作用于电动车辆的车身的干扰扭矩,获取与驱动电动车辆的驱动轴的转速相关的旋转体的角速度,基于加速器操作量计算第一扭矩指令值,将第一扭矩指令值设定为扭矩指令值,基于扭矩指令值控制在所述电动机中产生的扭矩,设定电动车辆停止时的目标停止位置,根据从电动车辆到目标停止位置的距离,计算旋转体的目标角速度,基于目标角速度与获取的角速度的差值,计算用于使电动车辆停止在目标停止位置的第二扭矩指令值。并且,在加速器操作量减少或变为零,且电动车辆即将停车的情况下,将第二扭矩指令值设定为扭矩指令值,并且根据到目标停止位置的距离调整电动机的制动驱动力,使扭矩指令值收敛于干扰扭矩。
6.以下,与附图一起详细说明本发明的实施方式。
附图说明
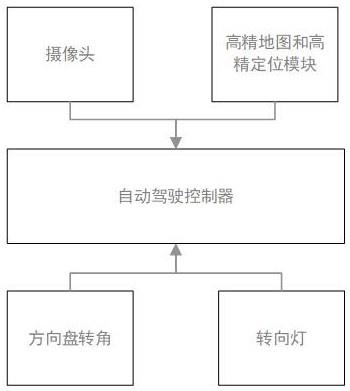
7.图1是表示具备一实施方式的电动车辆的控制装置的电动汽车的主要结构的块图。
8.图2是通过一实施方式的电动车辆的控制装置具备的电动机控制器进行的电动机电流控制的处理的流程。
9.图3是表示加速器开度-扭矩表的一例的图。
10.图4是用于实现目标停止位置计算处理的块图。
11.图5是将车辆的驱动力传递系统模型化的图。
12.图6是用于实现停止控制处理的块图。
13.图7是用于说明计算电动机角速度f/b扭矩的方法的图。
14.图8是用于说明计算干扰扭矩推定值的方法的图。
15.图9是用于实现抑制驱动力传递系统的振动的减振控制处理的块图。
16.图10是表示减振控制处理中使用的传递特性的一例的图。
17.图11是表示本实施方式的电动车辆的控制装置的控制结果的一例和现有的控制的控制结果的一例的时序图。
18.图12是表示本实施方式的电动车辆的控制装置的控制结果的其他例子的时序图。
具体实施方式
19.以下,参照附图对本发明的实施方式进行说明。
20.(第一实施方式)
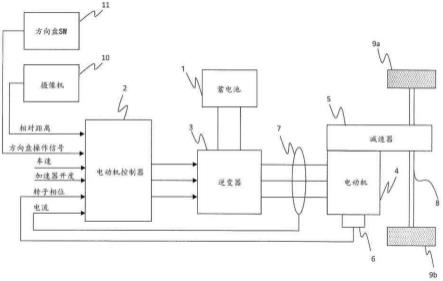
21.图1是表示具备第一实施方式的电动车辆的控制装置的电动汽车的主要结构的一例的块图。
22.本实施方式中的电动车辆的控制装置具备电动机4(以下简称为电动机4)作为车辆的驱动源的一部分或全部,可应用于通过电动机4的驱动力能够行驶的电动车辆。电动车辆不仅包括电动汽车,还包括混合动力汽车、燃料电池汽车。
23.图1所例示的电动车辆的控制装置仅通过加速器踏板的操作来控制车辆的加减速、停止。该电动车辆的驾驶员在加速时踩踏加速器踏板,在减速时或停止时减少所踩踏的加速器踏板的踩踏量、或者将加速器踏板的踩踏量操作为零。另外,在上坡路中,为了防止车辆后退,有时也一边踩下加速器踏板一边接近停止状态。
24.电动机控制器2将车速v、加速器开度θ、电动机4的转子相位α、电动机4的电流iu、iv、iw等表示车辆状态的信号、以及后述的相对距离和方向盘操作信号作为数字信号输入。并且,电动机控制器2根据输入的信号,生成用于控制向电动机4供给的电力的pwm信号,将生成的pwm信号向逆变器3供给,对逆变器3的开关元件进行开闭控制。
25.逆变器3例如通过按各相接通/断开2个开关元件(例如igbt或mos-fet等功率半导体元件),将从蓄电池1供给的直流电流转换为交流,使期望的电流流过电动机4。
26.电动机4例如由三相交流电动机实现。电动机4使用从逆变器3输出的交流电流产生驱动力,经由减速器5及驱动轴8向左右的驱动轮9a,9b传递驱动力。另外,电动机4在电动车辆行驶时被驱动轮9a,9b带动连动而旋转的情况下,通过产生再生驱动力而将电动车辆的动能作为电能回收。在这种情况下,逆变器3将在电动机4的再生运转时产生的交流电流转换为直流电流,并供给到蓄电池1。
27.旋转传感器6例如由分解器或编码器实现,检测电动机4的转子相位α。
28.电流传感器7检测供给到电动机4的三相交流电流iu、iv、iw。其中,由于三相交流电流iu、iv、iw之和为0(零),因此也可以检测任意两相的电流,通过运算求出剩余一相的电流。
29.摄像机10构成为能够拍摄车辆的行进方向,测量在行进方向上存在的车辆或障碍物与本车辆之间的相对距离。但是,摄像机10只是一个例子,并不限于此。代替摄像机10,也可以使用能够测量本车辆与存在于行进方向上的车辆或障碍物的相对距离的传感器或雷达。另外,摄像机10也可以是立体摄像机。另外,行进方向不仅包括车辆的前方,在车辆后退
时也包括后方。因此,为了拍摄车辆后退时的行进方向,优选具备不仅能够拍摄车辆的前方,还能够拍摄后方的摄像机。另外,以下为了方便将车辆的行进方向表现为前方。另外,以下将在车辆的行进方向上存在的车辆称为前车。
30.方向盘sw11检测驾驶员对方向盘的操作。
31.图2是表示由电动机控制器2进行的电动机电流控制的处理流程的流程图。
32.在步骤s201中,电动机控制器2输入表示电动车辆的动作状态的信号。在此所说的动作状态是指蓄电池1和逆变器3之间的直流电压值vdc(v)、电动车辆的车速v(km/h)、加速器开度ap(%)、电动机4的转子相位α(rad)、电动机4的转速nm(rpm)、以及供给到电动机4的三相交流电流值iu、iv、iw,方向盘操作信号等。另外,电动机控制器2输入后述的目标停止位置计算处理的控制运算所需的相对距离。
33.车速v(km/h)从未图示的车速传感器获取,或者通过通信从其他控制器获取。或者,电动机控制器2将转子机械角速度ωm乘以轮胎动半径r,除以末端传动齿轮的齿轮比,求出车速v(m/s),通过将车速v(m/s)乘以3600/1000,进行单位变换,求出车速v(km/h)。
34.加速器开度ap(%)从未图示的加速器开度传感器获取,或者通过通信从未图示的车辆控制器等其他控制器获取。
35.电动机4的转子相位α(rad)从旋转传感器6获取。电动机4的转速nm(rpm)是将电动机4的机械角速度即电动机转速ωm(rad/s)乘以60/(2π)而求出的。电动机转速ωm(rad/s)是转子角速度ω(电角)除以电动机4的极对数p而得到的。转子角速度ω通过对转子相位α进行微分而求出。
36.从电流传感器7获取流过电动机4的电流iu、iv、iw(a)。
37.直流电压值vdc(v)从设置在蓄电池1和逆变器3之间的直流电源线上的电压传感器(未图示)获取,或者根据由蓄电池控制器(未图示)发送的电源电压值求出。
38.相对距离获取由摄像机10测量的测量值。或者,也可以通过通信从未图示的车辆控制器或其他控制器获取。另外,也可以使用gps、雷达、距离传感器、与前车的车车间通信、或者路车间通信等来测量相对距离。
39.方向盘操作信号也可以获取方向盘sw信号,或者通过通信从未图示的车辆控制器或其他控制器获取。
40.在步骤s202中,电动机控制器2设定第一扭矩目标值tm1*。具体而言,电动机控制器2基于在步骤s201中输入的加速器开度ap以及电动机转速ωm,例如通过参照加速器开度-扭矩表来设定第一扭矩目标值tm1*。
41.例如,在图3所示的加速器开度-扭矩表中,以加速器开度为0(全闭)时的电动机再生量变大的方式设定电动机扭矩。即,在电动机转速表示正值时,至少在加速器开度为0(全闭)时,设定负的电动机扭矩,以使再生制动力作用于电动车辆。但是,加速器开度-扭矩表并不限定于图3所示的表。
42.在步骤s203中,电动机控制器2执行目标停止位置计算处理。在目标停止位置计算处理中,根据在步骤s201中由摄像机10获取的与前车或障碍物的相对距离和方向盘操作信号,设定目标停止位置。另外,基于加速器开度θ与前车的相对距离,判断是否介入停止位置控制,在介入停止位置控制的情况下,将停止位置控制开始标志设定为1。关于目标停止位置计算处理的详细情况将在后面叙述。
43.在步骤s204中,电动机控制器2执行停止控制处理。在停止控制处理中,根据在步骤s203中设定的停止位置控制开始标志来设定扭矩目标值。电动机控制器2在停止位置开始标志为0时,将在步骤s202中计算出的第一扭矩目标值tm1*设定为第三扭矩目标值tm3*,在停止位置开始标志为1时,将随着电动机转速的降低而收敛于由干扰扭矩推定单元决定的干扰扭矩推定值td的第二扭矩目标值tm2*设定为第三扭矩目标值tm3*。另外,第二扭矩目标值tm2*在上坡路中为正扭矩,在下坡路中为负扭矩,在平坦路上大致为零。由此,能够与路面的坡度无关地保持停车状态。关于停止控制处理的详细情况将在后面叙述。
44.在步骤s205中,电动机控制器2不浪费驱动轴扭矩,进行抑制驱动轴8的扭转振动等驱动力传递系统振动的减振控制处理。具体而言,电动机控制器2输入在步骤s204中计算出的第三扭矩目标值tm3*和电动机转速ωm,计算出在不牺牲驱动轴扭矩的响应的情况下抑制扭矩传递系统振动(驱动轴8的扭转振动等)的第六扭矩目标值tm6*。关于减振控制处理的详细情况将在后面叙述。
45.在步骤s206中,电动机控制器2基于在步骤s205中计算出的第六扭矩目标值tm6*,电动机转速ωm以及直流电压值vdc,求出d轴电流目标值id*以及q轴电流目标值iq*。例如,预先准备通过实验结果或模拟结果等求出电动机扭矩指令值、电动机转速及直流电压值与d轴电流目标值及q轴电流目标值的关系的表。然后,电动机控制器2在获取电动机扭矩指令值tm*、电动机转速ωm以及直流电压值vdc后,参照准备的表求出d轴电流目标值id*以及q轴电流目标值iq*。
46.在步骤s207中,电动机控制器2进行电流控制,以使d轴电流id以及q轴电流iq分别与d轴电流目标值id*以及q轴电流目标值iq*一致。
47.具体而言,电动机控制器2基于在步骤s201中输入的三相交流电流值iu、iv、iw和电动机4的转子相位α,求出d轴电流id及q轴电流iq。接着,电动机控制器2根据d轴电流目标值id*和q轴电流目标值iq*、与d轴电流id和q轴电流iq的偏差,计算d轴电压指令值vd和q轴电压指令值vq。
48.另外,也可以对电动机控制器2计算出的d轴电压指令值vd和q轴电压指令值vq,加上抵消d-q正交坐标轴间的干扰电压所需的非干扰电压。
49.接着,电动机控制器2根据d轴电压指令值vd和q轴电压指令值vq、电动机4的转子相位α、三相交流电压指令值vu、vv、vw、以及直流电压值vdc,计算出pwm信号tu(%)、tv(%)、tw(%),由于根据这样求出的pwm信号tu、tv、tw使逆变器3的开关元件接通/断开,所以能够以电动机扭矩指令值tm*所表示的所希望的扭矩驱动电动机4。
50.以下,详细说明在图2的步骤s203中进行的目标停止位置计算处理。
51.图4是表示实现目标停止位置计算处理的功能结构的一例的块图。本实施方式的目标停止位置计算处理包括停止位置控制开始标志设定器1001、相对距离保持器1002、车间距离计算器1003和减法器1004而构成。
52.停止位置控制开始标志设定器1001(以下简称为标志设定器1001)执行根据加速器开度和相对距离设定停止位置控制开始标志的停止位置控制开始标志处理。标志设定器1001在加速器开度(操作量)为零(全闭)且相对距离为规定值以内时,将停止位置控制开始标志设定为1。另外,标志设定器1001在加速器开度为零以外且相对距离为规定值以上时,将停止位置控制开始标志设定为0。另外,在此的规定值是即使在执行了未设定目标停止位
置的现有的停止控制的情况下也能够判断为本车辆的停车位置不会过于接近前车或障碍物的相对距离,例如适当设定通过实验等预先发现的值。
53.相对距离保持器1002在标志设定器1001设定的停止位置控制开始标志从0变化为1的时刻保持相对距离。所保持的相对距离被输出到减法器1004。通过在这样的时刻保持相对距离,能够相对于前车或障碍物保持一定的距离而停车。
54.车间距离计算器1003执行车间距离计算处理,该车间距离计算处理根据驾驶员的方向盘操作量来变更与前车或障碍物的距离常数,计算停车时的相对距离目标值。所谓距离常数,是用于计算车辆停车时的本车辆与前车或障碍物的相对距离(车间距离)的目标值的常数。在本实施方式中,通过驾驶员的方向盘操作来变更距离常数,由此能够任意地变更停车时的车间距离的目标值。在图4中,示出了方向盘的操作量越增加,车间距离的目标值阶梯地设定越大的例子。
55.在减法器1004中,从由相对距离保持器1002计算出的相对距离减去由车间距离计算器计算出的车间距离目标值,从而计算目标停止位置。计算出的目标停止位置作为通过停止控制使车辆停止时成为目标的停止位置,输出到电动机角速度反馈扭矩设定器501。
56.接着,在对步骤s204中进行的停止控制处理进行说明时,首先,对本实施方式中的从电动车辆的电动机扭矩tm到电动机转速ωm的传递特性gp(s)进行说明。
57.图5是将车辆的驱动力传递系统模型化的图,该图中的各参数如下所示。
58.jm:电动机的惯性系数
59.jw:驱动轮的惯性系数
60.m:车辆的质量
61.kd:驱动系统的扭转刚性系数
62.k
t
:与轮胎和路面的摩擦相关的系数
63.n:总齿轮比
64.r:轮胎的超重半径
65.ωm:电动机转速
66.tm*:电动机扭矩指令值
67.td:驱动轮的扭矩
68.f:施加在车辆上的力(驱动力)
69.v:车辆的速度(车身速度)
70.ωw:驱动轮的角速度
71.并且,通过使用图5所示的驱动力传递系统的模型,能够导出以下的运动方程式。
72.[式1]
[0073]jm
·
ωm=t
m*-td/n
…
(1)
[0074]
[式2]
[0075]
2jw·
ωw=t
d-r
·f…
(2)
[0076]
[式3]
[0077]
mv=f
…
(3)
[0078]
[式4]
[0079]
td=kd∫(ωm/n-ωw)dt
…
(4)
[0080]
[式5]
[0081]
f=k
t
(r
·
ω
w-v)
…
(5)
[0082]
若基于由上述式(1)至(5)表示的运动方程式,求出作为从电动机4的电动机扭矩指令值tm*到电动机转速ωm的传递函数的传递特性gp(s),则由下式(6)表示。
[0083]
[式6]
[0084][0085]
其中,式(6)中的各参数由下式(7)表示。
[0086]
[式7]
[0087][0088]
若调查由上式(6)表示的传递特性gp(s)的极和零点,则能够使传递特性gp(s)近似于下式(8)那样的传递特性,一个极和一个零点表示极其接近的值。这意味着式(8)的传递特性gp(s)中的α和β表示极其接近的值。
[0089]
[式8]
[0090][0091]
因此,通过进行上式(8)中的极零抵消(近似于α=β)而导出的车辆模型gp(s),如下式(9)所示,具有(2次)/(3次)的传递特性。
[0092]
[式9]
[0093][0094]
根据车辆模型gp(s)及减振控制的算法,式(9)的车辆模型gp(s)可以看作下式(10)所示的传递特性gr(s)。
[0095]
[式10]
[0096]
[0097]
接着,说明从电动机扭矩tm到车身速度v的传递特性gpv(s)。
[0098]
若根据上述式(1)至式(5)求出传递特性gpv(s),则传递特性gpv(s)由下式(11)表示。
[0099]
[式11]
[0100][0101]
在此,上述式(11)中的各参数由下式(12)表示。
[0102]
[式12]
[0103][0104]
当基于上述表达式(8)和式(11)求出从电动机转速ωm到车身速度v的传递特性gωv(s)时,传递特性gωv(s)由以下表达式(13)表示。
[0105]
[式13]
[0106][0107]
接着,对从电动机扭矩tm到电动车辆的驱动力f的传递特性gpf(s)进行说明。
[0108]
当基于上述式(1)至式(5)求出传递特性gpf(s)时,传递特性gpf(s)由下式(14)表示。
[0109]
[式14]
[0110][0111]
接着,对图2的步骤s204中进行的停止控制处理的详细情况进行说明。
[0112]
图6是表示实现停止控制处理的功能结构的一例的块图。在图6中,作为实现停止控制处理的功能结构,示出了电动机角速度f/b扭矩设定器501、干扰扭矩推定器502、减法器503、扭矩比较器504。
[0113]
电动机角速度f/b扭矩设定器501根据检测出的电动机转速ωm、由后述的目标停止位置计算处理计算出的目标停止位置、由停止位置控制开始标志处理设定的停止位置控制开始标志,计算用于使用电动机4的再生制动力使电动车辆停止的电动机角速度反馈扭矩tω(以下称为电动机角速度f/b扭矩tω)。详细内容参照图7进行说明。
[0114]
图7是用于说明电动机角速度f/b扭矩设定器501计算电动机角速度f/b扭矩tω的方法的图。
[0115]
电动机角速度f/b扭矩设定器501具备单位变换器601、积分器602、减法器603、607、乘法器604、609,上下限限制器605、转速切换器606和控制块608。
[0116]
单位变换器601通过对电动机转速ωm乘以增益k2来进行单位变换(rad/s
→
m/s)。
[0117]
积分器602通过对由单位变换器601进行了单位变换处理的电动机转速ωm实施积分处理,来计算停止控制开始后的移动距离。另外,积分器602在停止位置控制开始标志从0变化为1的时刻被初始化。
[0118]
减法器603计算目标停止位置与停止控制开始后的移动距离的偏差。计算出的偏差被输入到乘法器604。
[0119]
乘法器604通过将输入的偏差乘以增益k1,计算与偏差对应的转速。
[0120]
上下限限制器605对由乘法器604计算出的转速实施上下限限制。作为上限极限值,可以设定停止控制开始标志从0变化为1时的电动机转速。进而,作为下限极限值,为了抑制车辆的后退,可以设定为0。
[0121]
转速切换器606根据停止控制开始标志的状态,对从上下限限制器605输出的转速实施转速切换处理,计算第一电动机转速目标值。在停止控制开始标志为1时,将从上下限限制器605输出的转速设定为第一电动机转速目标值。在停止控制开始标志为0时,将第一电动机转速目标值设定为0。
[0122]
减法器607计算第一电动机转速目标值与电动机转速ωm的偏差,计算第二电动机转速目标值。计算出的第二电动机转速目标值被输入到控制块608。另外,在图中,在减法器607的附近表示的 、-的位置可以替换,也可以适当设定。
[0123]
控制块608承担作为模拟或近似上述式(13)的传递特性gωv(s)的滤波器,即具有传递特性gωv(s)的滤波器的功能。因此,控制块608输入电动机转速ωm,并进行考虑传输特性gωv(s)的滤波处理,从而计算表示车身速度v的推定值的推定车身速度v^。
[0124]
另外,式(13)的传递特性gωv(s)可以如下式(15)那样近似。
[0125]
[式15]
[0126][0127]
因此,控制块608也可以代替式(13)的传递特性gωv(s)而使用式(15)的传递特性gωv's进行滤波处理。由此,与使用式(13)的传递特性gωv(s)的情况相比,能够减少运算处理。
[0128]
另外,代替上式(15)中的时间常数τωv,也可以使用由式(14)确定的极ωp。这样,通过使用一个从电动机转速ωm到车身速度v的传递特性的分母的极,能够计算出推定车身速度v^。
[0129]
另外,代替上述式(14),也可以使用在复平面上近似远离原点的极α的特性的下式(16)。
[0130]
[式16]
[0131][0132]
另外,控制块608也可以构成为,考虑从电动机转速ωm到推定车身速度v^、表示从
驱动力f到电动机扭矩tm的传递特性的上式(16),利用下式(17)的传递特性gωv(s)进行滤波处理。
[0133]
[式17]
[0134][0135]
另外,在上式(17)中,通过乘以考虑了齿轮比以及轮胎同半径等的增益k,能够将传递特性gωv(s)的输入设为电动机转速ωm,将输出设为推定车身速度v^。
[0136]
并且,在乘法器609中,通过对从控制块608输出的推定车身速度v^乘以增益kvref,计算出角速度反馈扭矩tω。其中,增益kvref被设定为大于0的值(kvref》0)。
[0137]
接着,对图6所示的干扰扭矩推定器502进行说明。干扰扭矩推定器502基于电动机转速ωm和电动机扭矩指令值tm*,计算干扰扭矩推定值td。详细情况使用图8进行说明。
[0138]
图8是用于说明基于电动机转速ωm以及电动机扭矩指令值tm*计算干扰扭矩推定值td的方法的图。
[0139]
干扰扭矩推定器502具有控制块701、控制块702和减法器703。
[0140]
控制块701承担作为具有h1(s)/gr(s)的传递特性的滤波器的功能,通过输入电动机转速ωm进行滤波处理,计算第一电动机扭矩推定值。
[0141]
控制块701的传递特性中的构成分母的gr(s)是上述式(10)所示的传递特性,是从式(9)的车辆模型gp(s)及减振控制的算法导出的车辆模型。另外,构成传递特性的分子的h1(s)是具有分母次数与分子次数的差值为车辆模型gp(s)的分母次数与分子次数的差值以上的传递特性的低通滤波器。
[0142]
控制块702承担作为具有传递特性h1(s)的滤波器的功能,输入电动机扭矩指令值tm*,进行考虑了传递特性h1(s)的滤波处理,由此计算第二电动机扭矩推定值。
[0143]
减法器703将第一电动机扭矩推定值与第二电动机扭矩推定值的偏差作为干扰扭矩推定值td输出。本实施方式的减法器703从第二电动机扭矩推定值中减去第一电动机扭矩推定值,计算干扰扭矩推定值td。
[0144]
另外,本实施方式中的干扰扭矩推定值td通过图8所示的干扰观测器来推定,但也可以使用例如车辆前后g传感器等测量器来推定。
[0145]
在此,作为作用于车辆的干扰,可以考虑空气阻力、由乘坐人数或装载量引起的车辆质量的变动而产生的模型化误差、轮胎的滚动阻力、路面的坡度阻力等,但在即将停车时或初始启动时成为支配性的干扰因素是坡度阻力。干扰因素根据运转条件而不同,但干扰扭矩推定器502基于电动机扭矩指令值tm*、电动机转速ωm、减振控制的算法和从车辆模型gp(s)导出的传递特性gr(s)来计算干扰扭矩推定值td,因此能够一并推定上述的干扰因素。由此,在任何运转条件下,都能够实现从减速开始的平稳的停车。
[0146]
返回图6继续说明。减法器503通过将来自电动机角速度f/b扭矩设定器501的电动机角速度f/b扭矩tω和来自干扰扭矩推定器502的干扰扭矩推定值td相加,计算第二扭矩目标值tm2*。
[0147]
扭矩比较器504对第一扭矩目标值tm1*和第二扭矩目标值tm2*的大小进行比较,在判断为第二扭矩目标值tm2*比第一扭矩目标值tm1*大的情况下,或者由停止位置控制开始标志设定器1001计算出的停止控制开始标志的状态为1时,判断为即将停车,通过将第三
扭矩目标值tm3*从第一扭矩目标值tm1*切换为第二扭矩目标值tm2*来执行停止控制。另外,扭矩比较器504在判断为第一扭矩目标值tm1*比第二扭矩目标值tm2*大的情况下,或者由停止位置控制开始标志处理器1001计算出的停止位置控制开始标志的状态为0时,判断为不是即将停车,将第三扭矩目标值tm3*从第二扭矩目标值tm2*切换为第一扭矩目标值tm1*。另外,为了维持停车状态,第二扭矩目标值tm2*在上坡路收敛为正扭矩,在下坡路收敛为负扭矩,在平坦路收敛为大致零。
[0148]
接着,详细说明在图2的步骤s205中进行的减振控制处理。
[0149]
图9是表示实现抑制电动车辆的驱动力传递系统的振动的减振控制处理的功能结构的一例的块图。减振控制处理由f/f补偿器和f/b补偿器的组合构成。
[0150]
在图9中,作为f/f补偿器示出了控制块801,作为f/b补偿器示出了加法器805、控制块802、减法器806、控制块803、乘法器804。
[0151]
控制块801承担作为具有gr(s)/gp(s)的传递特性的滤波器的功能,输入第三扭矩目标值tm3*,进行降低电动车辆的扭转振动的滤波处理,由此计算第四扭矩目标值tm4*。
[0152]
控制块801的传递特性中的、构成分母的gp(s)是式(9)的车辆模型gp(s),构成分子的gr(s)是根据车辆模型gp(s)和减振控制的算法导出的式(10)的车辆模型。
[0153]
加法器805将构成f/b补偿器的乘法器804的输出与通过前馈控制得到的第四扭矩目标值tm4*相加,输出第六扭矩目标值tm6*。
[0154]
控制块802承担作为具有车辆模型gp(s)的滤波器的功能。因此,控制块802输入第六扭矩目标值tm6*,进行考虑了车辆模型gp(s)的滤波处理,由此,计算出表示电动机转速ωm的推定值的电动机转速推定值ωm^。
[0155]
减法器806输出电动机转速推定值ωm^与电动机转速ωm的偏差。本实施方式的减法器806从电动机转速推定值ωm^减去电动机转速ωm来计算出偏差。
[0156]
控制块803承担作为具有h2(s)/gp(s)的传递特性的滤波器的功能,通过输入减法器806的偏差进行滤波处理,计算表示干扰d的推定值的推定干扰d^。
[0157]
控制块803的传递特性中的式(9)的车辆模型gp(s)为从减振控制的算法导出的车辆模型,构成分子的h2(s)是具有成为仅降低振动的反馈要素的传递特性的带通滤波器。
[0158]
乘法器804对来自控制块803的推定干扰d^乘以反馈增益k
fb
,计算考虑了电动机转速ωm的控制误差的第五扭矩目标值tm5*。然后,通过由加法器805将第五扭矩目标值tm5*与第四扭矩目标值tm4*相加,将电动机转速ωm反馈给第六扭矩目标值tm6*,以抑制电动车辆的扭转振动的产生。
[0159]
接着,对控制块803具有的传递特性h2(s)进行说明。
[0160]
图10是表示用于实现传输特性h2(s)的带通滤波器的一例的图。
[0161]
传递特性h2(s)被设定为低通侧的衰减特性与高通侧的衰减特性大致一致,且驱动系统的扭转共振频率在对数轴(对数刻度)上处于通频带的中央部附近。通过这样设定滤波器的特性,能够得到最大的效果。
[0162]
例如,在使用一阶高通滤波器和一阶低通滤波器构成传递特性h2(s)的情况下,传递特性h2(s)由下式(18)表示,频率fp被设定为驱动系统的扭转共振频率,k被设定为任意值。
[0163]
[式18]
[0164][0165]
其中,τ
l
=1/(2πf
hc
)、f
hc
=k
·fp
、τh=1/(2πf
lc
)、f
lc
=f
p
/k。
[0166]
另外,在本实施方式中,由于在电动车辆的驱动力传递系统中产生扭转振动,因此并用了停止控制和减振控制,但对于在驱动力传递系统中不产生扭转振动的电动车辆,也可以不执行步骤s205的减振控制处理。
[0167]
以下,参照图11及图12说明将本实施方式的电动车辆的控制装置应用于电动汽车时的效果。图11(a)表示平坦路,图11(b)表示上坡路,图11(c)表示在下坡路,执行停止控制时的时序图。都是虚线表示现有的停止控制(现有例),实线表示本实施方式的停止控制(实施例)。另外,图12表示在本实施方式的停止控制中前车移动的情况下转移到现有例的情况下的时序图。另外,图11、图12都从上开始表示电动机扭矩指令值、电动机转速以及本车辆的位置。
[0168]
在图11(a)所示的平坦路的现有例中,在时刻t0,驾驶员的加速器开度操作量为零,判断为停止控制开始,在时刻t3,通过停止控制,电动机转速逐渐地收敛为零。
[0169]
现有例中,不依赖于与前车或障碍物的相对距离,唯一地决定电动机扭矩,因此再生扭矩小。其结果,可知在时刻t2与前车或障碍物的相对距离为0,发生碰撞。这样,在现有例中,不能停止在驾驶员意图的目标停止位置。
[0170]
另一方面,在本发明的实施例中,在时刻t0驾驶员的加速器开度操作量为零,判断为停止控制开始而开始停止控制,直至时刻t1能够根据与前车或障碍物的相对距离将电动机再生扭矩设定得较大,因此,可知在时刻t3能够确保与前车或障碍物的相对距离并实现顺畅的停车。
[0171]
在图11(b)所示的上坡路的现有例中,在时刻t0驾驶员的加速器踏板操作量变为零,判断为停止控制开始,直至时刻t3通过停止控制使电动机转速逐渐地收敛为零。
[0172]
现有例在时刻t1将电动机再生扭矩设定得较大,因此到停止为止的时间变短。因此,电动机转速收敛为零时的位置(本车的停车位置)相对于前车或障碍物的位置在远的跟前停止,不能停止在驾驶员意图的目标停止位置。
[0173]
另一方面,在实施例中,在时刻t0驾驶员的加速器开度操作量成为零,判断为停止控制开始而开始停止控制,直至时刻t2能够根据与前车或障碍物的相对距离将电动机再生扭矩设定得较小,因此可知在时刻t4能够确保与前车或障碍物的相对距离并实现顺畅的停车。
[0174]
在图11(c)所示的下坡路的现有例中,在时刻t0驾驶员的加速器操作量变为零,判断为停止控制开始,直至时刻t2通过停止控制使电动机转速逐渐地收敛为零。
[0175]
在现有例中,不依赖于与前车或障碍物的相对距离,唯一地决定电动机扭矩,因此再生扭矩小,在时刻t2与前车或障碍物的相对距离接近0,可知有可能发生碰撞。其结果是,在现有例中,不能停止在驾驶员意图的目标停止位置。
[0176]
另一方面,在实施例中,在时刻t0驾驶员的加速器开度操作量成为零,判断为停止控制开始而开始停止控制,直至时刻t1能够根据与前车或障碍物的相对距离将电动机再生扭矩设定得较大,因此,可知在时刻t2能够确保与前车或障碍物的相对距离并实现顺畅的停车。
[0177]
这样,根据本发明的实施例,能够使本车辆停在驾驶员意图的停止位置即目标停止位置。
[0178]
图12表示本实施方式的停止控制中前车移动时的行为。另外,时刻t1以后的实线表示转移到现有的停止控制时的行为,时刻t1以后的虚线表示未转移到现有的停止控制时的行为。
[0179]
另外,在本实施方式的停止控制中转移到现有的停止控制的情况下,只要使第一电动机转速目标值(目标角速度)的值为零即可,更具体而言,在停止控制中,通过使上述电动机角速度f/b扭矩设定器501所具有的转速切换器606的输出为零,从而不考虑目标停止位置,能够转移到使电动机4的扭矩随着电动机转速的降低而收敛于干扰扭矩的现有的停止控制。
[0180]
在图中,在时刻t0前车开始移动。然后,由于在时刻t1目标停止位置与前车的距离超过了规定值,因此转移到不设定目标停止位置的现有的停止控制。这样,在转移到时刻t1时转移到现有的停止控制,使减速度与现有例相同,由此,相对于移动后的前车的位置,能够不使驾驶员产生不适感地停车。
[0181]
这样,通过应用本实施方式,能够使车辆平滑地停车在与前车或障碍物的相对距离对应的目标停止位置。
[0182]
以上,一实施方式的电动车辆的控制方法是将电动机作为行驶驱动源,利用电动机4的再生制动力进行减速的电动车辆的控制方法。该控制方法中,获取加速器操作量,推定作用于电动车辆的车身的干扰扭矩,获取与驱动电动车辆的驱动轴8的转速相关的旋转体的角速度(电动机转速ωm),基于加速器操作量计算第一扭矩指令值(第一扭矩目标值tm1*),将第一扭矩指令值设定为扭矩指令值(电动机扭矩指令值tm*),根据扭矩指令值控制电动机4产生的扭矩,设定电动车辆停止时的目标停止位置,根据从电动车辆到目标停止位置的距离计算出旋转体的目标角速度(第一电动机转速目标值),根据目标角速度与获取的角速度的差值,计算出用于使电动车辆停止在目标停止位置的第二扭矩指令值(第二扭矩目标值tm2*)。并且,在加速器操作量减少或变为零,且电动车辆即将停车的情况下,将第二扭矩指令值设定为扭矩指令值,并且根据到目标停止位置的距离来调整电动机4的制动驱动力(制动/驱动力),使扭矩指令值收敛于干扰扭矩推定值td。
[0183]
由此,能够根据到目标停止位置的距离计算出目标角速度,并根据该目标角速度控制电动机扭矩,因此能够使本车辆停止在驾驶员所希望的位置。
[0184]
另外,根据一实施方式的电动车辆的控制方法,目标停止位置是通过从电动车辆与存在于该电动车辆的行进方向上的车辆或障碍物的相对距离减去规定距离而计算出的。由此,根据与前车的车间距离来设定目标停止位置,因此,例如即使在前车的减速度增加的情况下,也能够减轻车辆停止时与前车碰撞的可能性。另外,通过这样进行控制,能够降低驾驶员对制动器踏板进行换踏操作的必要性,因此能够提高驾驶性能,提高车辆的商品价值。另外,通过从与车辆或障碍物的相对距离减去规定的距离而计算出目标停止位置,能够相对于前车或障碍物保持一定的距离而停车。
[0185]
另外,根据一实施方式的电动车辆的控制方法,上述规定距离是电动车辆停止时的该电动车辆与存在于该电动车辆的行进方向上的车辆或障碍物的相对距离的目标值,被设定为能够由驾驶员变更。由此,驾驶员能够任意地变更停车时的从本车辆到前车或障碍
物的距离。
[0186]
另外,根据一实施方式的电动车辆的控制方法,电动车辆与存在于该电动车辆的行进方向上的车辆或障碍物的相对距离使用能够测量距离的传感器、雷达或摄像机10来检测。由此,能够检测出与本车辆之间的相对距离,因此,能够基于检测出的相对距离来计算出目标停止位置。
[0187]
另外,根据一实施方式的电动车辆的控制方法,在电动车辆与存在于该电动车辆的行进方向上的车辆或障碍物的相对距离降低到规定值以下的情况下,判断为即将停车,将扭矩指令值(电动机扭矩指令值tm*)从第一扭矩指令值(第一扭矩目标值tm1*)切换到第二扭矩指令值(第二扭矩目标值tm2*)。由此,在以第一扭矩目标值tm1*减速后,切换为用于使车辆停止在目标停止位置的第二扭矩目标值tm2*的电动机扭矩指令值tm*收敛于干扰扭矩,因此,能够实现没有加速度振动的始终平滑的减速,并且能够使车辆停在目标停止位置。
[0188]
另外,根据一实施方式的电动车辆的控制方法,比较第一扭矩指令值和第二扭矩指令值的大小,在第一扭矩指令值相对于第二扭矩指令值大的情况下,将扭矩指令值(电动机扭矩指令值tm*)从第二扭矩指令值(第二扭矩目标值tm2*)切换为第一扭矩指令值(第一扭矩目标值tm1*)。由此,从使车辆停止在目标停止位置的第二扭矩目标值tm2*切换为根据加速器操作量计算出的第一扭矩目标值tm1*,因此,能够进行与驾驶员的要求相对应的行驶。
[0189]
另外,根据一实施方式的电动车辆的控制方法,在加速器操作量减少或变为零,且电动车辆为即将停车的情况下因存在于电动车辆的行进方向的车辆或障碍物移动而目标停止位置与该车辆或障碍物的位置离开规定距离以上的情况下,将目标角速度设定为零。由此,能够从停止在目标停止位置的本实施方式的停止控制转移到不考虑目标停止位置而使电动机4的扭矩随着电动机转速的降低而收敛于干扰扭矩的现有的停止控制。其结果,通过维持在前车移动之前设定的目标停止位置,能够避免使车辆停止在过于远离前车的位置的情况,因此,能够使车辆停止而不会使驾驶员产生不适感。
[0190]
另外,根据一实施方式的电动车辆的控制方法,对目标角速度(乘法器604的输出值)实施规定的限制值。由此,能够抑制在停止控制开始时电动机扭矩指令值tm*急剧地变动。
[0191]
以上,对本发明的实施方式进行了说明,但上述实施方式只不过表示了本发明的应用例的一部分,并不是将本发明的技术范围限定于上述实施方式的具体结构的意思。
[0192]
例如,上述各种运算中使用的电动机转速ωm只要是与驱动电动车辆的驱动轴8的转速相关的旋转体的角速度即可,也可以适当变更。例如,作为在上述各种运算中使用的参数,也可以使用车轮速度、车身速度或驱动轴的转速等来代替电动机转速ωm。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。