1.本实用新型属于设备运输技术领域,涉及一种基于数字孪生工厂车间的设备移动器。
背景技术:
2.随着社会的发展,传统型工厂已逐步转型智能化的智慧工厂、数字孪生型工厂。目前我国已提出了2035智能制造发展战略,在智能制造快速发展的背景下,数字孪生得到了迅猛的发展,数字孪生车间成为智能制造的重要解决方式之一。同时数字孪生车间也面临着很多问题急需去解决,由于智能化的车间少不了很多精密仪器,前期由于有包装存在容易搬运或转移到别的位置,但后期由于工厂设备挪动或新设备添置等规划需要移动这些精密设备放置在别的位置上,传统的平板车或小型拖车在运输中因工厂车间地面路况问题造成的颠簸和震动可能会对精密仪器造成不同程度的损坏,在日后的生产作业可能造成潜在的危险和损害。而普通的叉车和吊车在由于体积问题和车间操作空间无法在确保仪器安全下灵活搬运。
技术实现要素:
3.本实用新型要解决的技术问题是针对上述现有技术的不足,而提供一种基于数字孪生工厂车间的设备移动器,该一种基于数字孪生工厂车间的设备移动器为解决上述技术问题,本实用新型提供如下技术方案:一种基于数字孪生工厂车间的设备移动器,包括外臂器、内臂器和载物台,所述外臂器和内臂器均为拱形,所述内臂器设置在外臂器和载物台之间,
4.所述外臂器顶端下方设置有第一电机固定架和第一绞盘,所述第一电机固定架内设置有外臂牵引电机,所述外臂牵引电机的转轴与第一绞盘连接,所述第一绞盘内设置有两个外臂牵引绳,所述外臂器下方设置有至少个第一定滑轮,所述外臂牵引绳的另一端穿过第一定滑轮与载物台连接,
5.所述内臂器顶端上方固定有旋转电机,所述旋转电机的转轴与外臂器底部固定连接,所述内臂器顶端下方设置有第二电机固定架和第二绞盘,所述第二电机固定架内设置有内臂牵引电机,所述内臂牵引电机的转轴与第二绞盘连接,所述第二绞盘内设置有两个内臂牵引绳,所述内臂器下方设置有至少个第二定滑轮,所述内臂牵引绳另一端穿过第二定滑轮与载物台连接,
6.所述载物台上设置有六轴传感器模块和rfid射频识别器,所述外臂器和内臂器底端安装有万向轮,所述外臂器上安装有终端控制器,所述旋转电机、外臂牵引电机、内臂牵引电机、六轴传感器模块和rfid射频识别器分别与终端控制器电连接。
7.优选的,所述万向轮上安装有锁紧件。
8.优选的,所述六轴传感器模块的型号为atk-mpu6050。
9.优选的,所述终端控制器的型号为stm32zet6。
10.优选的,所述外臂牵引绳和内臂牵引绳由多股尼龙绳缠绕制成。
11.优选的,所述旋转电机、外臂牵引电机和内臂牵引电机的型号为42步进电机。
12.优选的,所述外臂器和内臂器上均匀开设有镂空孔。
13.有益效果:本实用新型体积小,设备移动器在不使用时外臂器和内臂器可折叠在同一水平面上,提高了空间利用率;灵活性程度高,根据实际工厂设备大小可更换不同大小的外臂其和内臂器重新组合在一起,提高了设备利用率;抗震性好,采用拱形结构和用牵引绳减少了在运输时产生对仪器的有害的震动;设备移动器的内、外臂器可根据使用者的使用需求可以自行调节其角度,适用多种情况。
附图说明
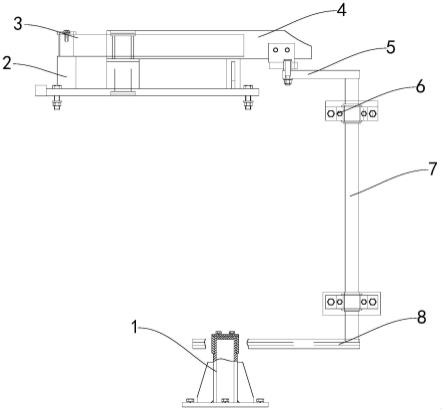
14.图1为本实用新型结构示意图;
15.图2为a处放大图;
16.图3为b处放大图;
17.图4为第一电机固定架和旋转电机的转轴在外臂器下方的位置图
18.图中符号说明:1:外臂器;101:第一电机固定架;2:内臂器;201:第二电机固定架;3:载物台;5:旋转电机;6:转轴;7:外臂牵引电机;8:外臂牵引绳;901:第一绞盘;902:第二绞盘;10:第一定滑轮;11:内臂牵引电机;12:内臂牵引绳;13:第二定滑轮;14:六轴传感器模块;15:rfid射频识别器;16:万向轮;17:终端控制器; 18:镂空孔;101:第一电机固定架;201:第二电机固定架。
具体实施方式
19.下面结合附图和具体较佳实施方式对本实用新型作进一步详细的说明。
20.本实用新型的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本实用新型的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本实用新型的保护范围。
21.实施例1:
22.参考图1-3,本实用新型提供一种技术方案,1.一种基于数字孪生工厂车间的设备移动器,其特征在于:包括外臂器1、内臂器2和载物台3,外臂器1和内臂器2均为拱形,内臂器2设置在外臂器1和载物台3之间,
23.外臂器1顶端下方设置有第一电机固定架101和第一绞盘901,第一电机固定架101 内设置有外臂牵引电机7,外臂牵引电机7的转轴与第一绞盘901连接,第一绞盘901内设置有两个外臂牵引绳8,外臂器1下方设置有至少2个第一定滑轮10,外臂牵引绳8的另一端穿过第一定滑轮10与载物台3连接,
24.内臂器2顶端上方固定有旋转电机5,旋转电机5的转轴6与外臂器1底部固定连接,内臂器2顶端下方设置有第二电机固定架201和第二绞盘902,第二电机固定架201内设置有内臂牵引电机11,内臂牵引电机11的转轴与第二绞盘902连接,第二绞盘902内设置有两个
内臂牵引绳12,内臂器2下方设置有至少2个第二定滑轮13,内臂牵引绳12另一端穿过第二定滑轮13与载物台3连接,
25.载物台3上设置有六轴传感器模块14和rfid射频识别器15,外臂器1和内臂器2底端安装有万向轮16,外臂器1上安装有终端控制器17,旋转电机5、外臂牵引电机7、内臂牵引电机11、六轴传感器模块14和rfid射频识别器15分别与终端控制器17电连接。
26.万向轮16位于移动器的最底部,便于装卸精密设备在载物台3上,若所需移动设备过于笨重可先将设备底部四周垫高再将载物台3从外臂牵引绳8和内臂牵引绳12上拆下放在设备下面,再将外臂牵引绳8和内臂牵引绳12重新固定;通过终端控制器17控制旋转电机5转动转轴6,转轴6带动外臂器1相对于内臂器2旋转,并与内臂器2形成夹角,夹角范围在大于0度且小于180度,这样使被移动的设备重量通过外臂牵引绳8和内臂牵引绳12均匀分摊到外臂器1和内臂器2上,当设备被放置在载物台3上后,其侧面的rfid 射频识别器15识别其载物台3上设备表面贴的电子标签从而获取该设备一系列信息,rfid 射频识别器15将设备信息发送到终端控制器17中,终端控制器17处理设备信息得到设备重量、长、宽高等后控制内臂牵引电机11和外臂牵引电机7以相应速度旋转,第一绞盘901收缩两个外臂牵引绳8、第二绞盘902收缩两个内臂牵引绳12带动载物台3缓缓提升高度,当提升至一定高度时停止并保持当前状态,这时便可由人员推拉外臂器1和内臂器2向被移动设备新放置地点移动;
27.在遇到具有一定坡度的路面状况时,载物台3底部中心内的六轴传感器模块14便会将水平变化的角度发送到终端控制器17,终端控制器17通过控制内臂牵引电机11转动第二绞盘902、外臂牵引电机7转动第一绞盘901,从而收放外臂牵引绳8或/和内臂牵引绳 12调节载物台3保持相对位置的水平从而保证被运设备的稳定。
28.在运输过程中,不同的路面状况会造成设备移动器不同程度的颠簸,但是由于外臂器 1和内臂器2采用了拱形结构更稳定,剩下通过外臂牵引绳8和内臂牵引绳12传导到载物台3的能量对被运载设备可忽略不计,当到达新地点后,终端控制器17控制外臂牵引电机7和内臂牵引电机11,控制外臂牵引绳8和内臂牵引绳12收放,使载物台3缓缓落下到合适的高度,将被运载设备放在新地点后,将载物台3恢复初始状态,将外臂器1和内臂器2折叠到同一水平面后移动到车间空地,占地面积小,提高了空间利用率。
29.进一步地,万向轮16上安装有锁紧件19,在设备移动器需要固定不动时锁紧件19锁死万向轮16,防止设备移动器打滑。
30.进一步地,六轴传感器模块14的型号为atk-mpu6050。
31.进一步地,终端控制器17的型号为stm32zet6。
32.进一步地,外臂牵引绳8和内臂牵引绳12由多股尼龙绳缠绕制成,能够承受较高的拉力。
33.进一步地,旋转电机5、外臂牵引电机7和内臂牵引电机11的型号为42步进电机。
34.进一步地,外臂器1和内臂器2上均匀开设有镂空孔18,在运输过程中,不同的路面状况会造成设备移动器不同程度的颠簸,镂空孔18能使传导到外臂器1和内臂器2上的能量损失大部分,保持稳定。
35.尽管本实用新型的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本实用新型的限制。在本领域技术人员阅读了上述内容后,对于本实用新型的多种修改和替代都将是显而易见的。在本实用新型的技术构思范围内,可以
对本实用新型的技术方案进行多种等同变换,这些等同变换均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。