1.本实用新型涉及机器臂设备技术领域,尤其涉及一种柔性线路板用高精度智能机器臂。
背景技术:
2.柔性线路板,又称软性线路板、挠性线路板,其以质量轻、厚度薄、可自由弯曲折叠等优良特性而备受青睐,随着电子产业飞速发展,线路板设计越来越趋于高精度、高密度化。
3.柔性线路板在生产过程中需要移动,即从一个工位上移动到另一个工位上加工,目前都是通过机器臂设备进行移动,然而,现有技术中的机器臂设备结构较为复杂,使用起来较为笨重,不便于使用。
技术实现要素:
4.为了解决上述背景技术中所提到的技术问题,而提出的一种柔性线路板用高精度智能机器臂。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种柔性线路板用高精度智能机器臂,包括底板,所述底板上固定安装有第一导杆,所述第一导杆上滑动连接有升降块,所述升降块上固定安装有第二气缸,所述第二气缸的活塞杆上固定安装有运动块,所述运动块底部固定安装有连接杆,所述连接杆底部固定安装有横板,所述横板底部固定安装有竖板,两个所述竖板之间固定安装有第二导杆,所述第二导杆上滑动连接有夹块,所述竖板上设有驱动机构。
7.作为上述技术方案的进一步描述:
8.所述驱动机构包括驱动电机,所述竖板上固定安装有连接板,所述连接板内开设有凹槽,所述夹块顶部固定连接有在凹槽内滑动的连接块,所述竖板一端固定安装有驱动电机,所述驱动电机通过传动组件驱动连接块运动。
9.作为上述技术方案的进一步描述:
10.所述传动组件包括螺杆,所述连接块上固定安装有移动块,所述驱动电机的输出轴上传动连接有与移动块螺纹连接的螺杆,所述螺杆两端的螺纹旋向反向设置。
11.作为上述技术方案的进一步描述:
12.所述第一导杆顶部固定安装有顶板,所述底板上固定安装有第一气缸,所述第一气缸的活塞杆与升降块固定安装。
13.作为上述技术方案的进一步描述:
14.所述驱动电机通过螺栓固定安装在竖板上。
15.作为上述技术方案的进一步描述:
16.所述竖板焊接在横板上。
17.作为上述技术方案的进一步描述:
18.所述底板由不锈钢材质制成。
19.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
20.1、本实用新型中,启动第一气缸,可以驱动夹块在竖直方向上运动,启动第二气缸,可以驱动夹块在水平方向上运动,启动驱动电机正转,带动螺杆正转,驱动夹块夹住柔性线路板,同理,启动驱动电机反转,驱动夹块放开柔性线路板,进而对柔性线路板进行移动,结构简单,使用起来较为轻巧,便于使用。
21.2、本实用新型中,启动驱动电机正转,带动螺杆正转,根据螺纹传动原理,驱动两个移动块向内运动,连接块在凹槽内滑动,带动两个夹块夹住柔性线路板,停止启动驱动电机,螺纹具有自锁功能,防止夹块运动,提高装置运行的稳定性。
附图说明
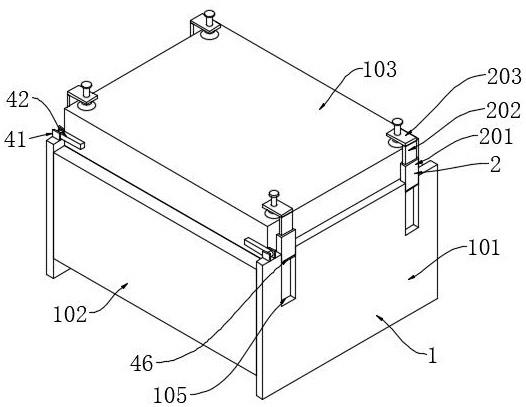
22.图1示出了根据本实用新型实施例提供的一种柔性线路板用高精度智能机器臂的主视示意图;
23.图2示出了根据本实用新型实施例提供的一种柔性线路板用高精度智能机器臂的部分零件的轴测示意图;
24.图3示出了根据本实用新型实施例提供的一种柔性线路板用高精度智能机器臂的横板的结构示意图;
25.图4示出了根据本实用新型实施例提供的一种柔性线路板用高精度智能机器臂的夹块的结构示意图。
26.图例说明:
27.1、底板;2、第一导杆;3、顶板;4、第一气缸;5、升降块;6、第二气缸;7、运动块;8、连接杆;9、横板;10、竖板;11、连接板;1101、凹槽;12、第二导杆;13、夹块;14、连接块;15、移动块;16、螺杆;17、驱动电机。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
29.请参阅图1-4,本实用新型提供一种技术方案:一种柔性线路板用高精度智能机器臂,包括底板1,底板1上固定安装有第一导杆2,第一导杆2滑动连接有升降块5,升降块5上固定安装有第二气缸6,第二气缸6的活塞杆上固定安装有运动块7,运动块7底部固定安装有连接杆8,连接杆8底部固定安装有横板9,横板9底部固定安装有竖板10,两个竖板10之间固定安装有第二导杆12,第二导杆12上滑动连接有夹块13,竖板10上设有驱动机构。
30.驱动机构包括驱动电机17,竖板10上固定安装有连接板11,连接板11内开设有凹槽1101,夹块13顶部固定连接有在凹槽1101内滑动的连接块14,竖板10一端固定安装有驱动电机17,驱动电机17通过传动组件驱动连接块14运动,传动组件包括螺杆16,连接块14上固定安装有移动块15,驱动电机17的输出轴上传动连接有与移动块15螺纹连接的螺杆16,螺杆16两端的螺纹旋向反向设置,启动驱动电机17正转,带动螺杆16正转,根据螺纹传动原
理,驱动两个移动块15向内运动,连接块14在凹槽1101内滑动,带动两个夹块13夹住柔性线路板,停止启动驱动电机17,螺纹具有自锁功能,防止夹块13运动,提高装置运行的稳定性。
31.第一导杆2顶部固定安装有顶板3,底板1上固定安装有第一气缸4,第一气缸4的活塞杆与升降块5固定安装,驱动电机17通过螺栓固定安装在竖板10上,竖板10焊接在横板9上,底板1由不锈钢材质制成。
32.工作原理:使用时,启动第一气缸4,可以驱动夹块13在竖直方向上运动,启动第二气缸6,可以驱动夹块13在水平方向上运动,启动驱动电机17正转,带动螺杆16正转,根据螺纹传动原理,驱动两个移动块15向内运动,进而驱动夹块13夹住柔性线路板,同理,启动驱动电机17反转,带动螺杆16反转,根据螺纹传动原理,驱动两个移动块15向外运动,进而驱动夹块13放开柔性线路板,进而对柔性线路板进行移动,结构简单,使用起来较为轻巧,便于使用。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种柔性线路板用高精度智能机器臂,包括底板(1),其特征在于,所述底板(1)上固定安装有第一导杆(2),所述第一导杆(2)上滑动连接有升降块(5),所述升降块(5)上固定安装有第二气缸(6),所述第二气缸(6)的活塞杆上固定安装有运动块(7),所述运动块(7)底部固定安装有连接杆(8),所述连接杆(8)底部固定安装有横板(9),所述横板(9)底部两端固定安装有竖板(10),两个所述竖板(10)之间固定安装有第二导杆(12),所述第二导杆(12)上滑动连接有夹块(13),所述竖板(10)上设有驱动机构。2.根据权利要求1所述的一种柔性线路板用高精度智能机器臂,其特征在于,所述驱动机构包括驱动电机(17),所述竖板(10)上固定安装有连接板(11),所述连接板(11)内开设有凹槽(1101),所述夹块(13)顶部固定连接有在凹槽(1101)内滑动的连接块(14),所述竖板(10)一端固定安装有驱动电机(17),所述驱动电机(17)通过传动组件驱动连接块(14)运动。3.根据权利要求2所述的一种柔性线路板用高精度智能机器臂,其特征在于,所述传动组件包括螺杆(16),所述连接块(14)上固定安装有移动块(15),所述驱动电机(17)的输出轴上传动连接有与移动块(15)螺纹连接的螺杆(16),所述螺杆(16)两端的螺纹旋向反向设置。4.根据权利要求3所述的一种柔性线路板用高精度智能机器臂,其特征在于,所述第一导杆(2)顶部固定安装有顶板(3),所述底板(1)上固定安装有第一气缸(4),所述第一气缸(4)的活塞杆与升降块(5)固定安装。5.根据权利要求4所述的一种柔性线路板用高精度智能机器臂,其特征在于,所述驱动电机(17)通过螺栓固定安装在竖板(10)上。6.根据权利要求5所述的一种柔性线路板用高精度智能机器臂,其特征在于,所述竖板(10)焊接在横板(9)上。7.根据权利要求6所述的一种柔性线路板用高精度智能机器臂,其特征在于,所述底板(1)由不锈钢材质制成。
技术总结
本实用新型公开了一种柔性线路板用高精度智能机器臂,包括底板,所述底板上固定安装有第一导杆,所述第一导杆上滑动连接有升降块,所述升降块上固定安装有第二气缸,所述第二气缸的活塞杆上固定安装有运动块,所述运动块底部固定安装有连接杆,所述连接杆底部固定安装有横板。本实用新型中,启动第一气缸,可以驱动夹块在竖直方向上运动,启动第二气缸,可以驱动夹块在水平方向上运动,启动驱动电机正转,带动螺杆正转,驱动夹块夹住柔性线路板,同理,启动驱动电机反转,驱动夹块放开柔性线路板,进而对柔性线路板进行移动,结构简单,使用起来较为轻巧,便于使用。便于使用。便于使用。
技术研发人员:陈汉 兰学武 周乐平
受保护的技术使用者:昆山十井电子科技有限公司
技术研发日:2021.12.21
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。