1.本发明涉及一种关节,具体涉及一种可垂直通过钢丝绳的机械臂水平转动关节。
背景技术:
2.随着工业技术的不断发展以及自动化技术的普及,机器人已经成为了工业生产提高效率的必要手段。钢丝驱动方式可以实现电机的远端控制,使得机器人低惯性关节以及并联驱动等设计更加方便实现,提高了机器人精度和灵活性。而在钢丝驱动设计中,往往需要钢丝通过单自由度或者多自由度的运动关节,而保证其长度不变,现有的设计一般是通过电机动态补偿,或者设计钢丝水平穿过关节轴心实现的,这两种方式前者会影响运动稳定性增加控制难度,而后者无法实现需要钢丝绳垂直通过传动工况。
技术实现要素:
3.本发明是为克服现有技术不足,提供一种可垂直通过钢丝绳的机械臂水平转动关节。该关节保证了垂直转动关节的钢丝绳在水平转动关节转动时长度不变。
4.本发明的技术方案是:
5.一种可垂直通过钢丝绳的机械臂水平转动关节,包含底座、法兰盘、支撑盘、差速传递机构和钢丝绳换向轮系;
6.法兰盘上设置有沿轴向延伸的承接件,承接件上开有过渡凹槽组,支撑盘上设置有沿轴向延伸的开口环形板,支撑盘上沿周向开有一对驱动凹槽,开口环形板上沿周向开有布绳凹槽组;钢丝绳换向轮系布置在法兰盘和支撑盘上,以用于将竖直方向上的变向钢丝绳组导向至水平方向,该变向钢丝绳组分别绕在布绳凹槽组、过渡凹槽组和钢丝绳换向轮系上;
7.法兰盘与差速传递机构的输出端相连,支撑盘与差速传递机构的输入端相连,差速传递机构活动安装在底座上,以实现支撑盘和法兰盘同步旋转时钢丝绳换向轮系上的变向钢丝绳组的钢丝绳长度不变;驱动法兰盘转动的动力钢丝绳组反向缠绕在一对驱动凹槽内,该动力钢丝绳组一端固定于支撑盘上,另一端固定于电机驱动轮上。
8.本发明相比现有技术的有益效果是:
9.本发明通过差速传递机构和钢丝绳换向轮系使得在水平关节运动过程,水平进入、垂直传出的变向钢丝绳组的钢丝绳长度不会发生变化,水平关节和垂直关节运动过程互不干涉,如此可实现处于基座上的钢丝驱动器远距离传输的功能。另外,通过钢丝绳传动的方式减轻了本体质量,使得整体灵活性提高,运动惯性降低,降低了传统电机动态补偿带来的控制难度。
10.下面结合附图和实施例对本发明的技术方案作进一步地说明:
附图说明
11.图1为本发明一种可垂直通过钢丝绳的机械臂水平转动关节的立体图;
12.图2为底座、法兰盘和支撑盘布置关系示意图;
13.图3为差速传递机构布置示意图;
14.图4为本发明一种可垂直通过钢丝绳的机械臂水平转动关节的主剖视图;
15.图5为钢丝绳换向轮系的布置示意图;
16.图6为本发明可垂直通过钢丝绳的机械臂水平转动关节工作原理图;
17.图7为变向钢丝绳组在布绳凹槽组、过渡凹槽组和钢丝绳换向轮系上的绕制示意图;
18.图8为变向钢丝绳组在钢丝绳换向轮系的布置示意图;
19.图9为动力钢丝绳组在驱动凹槽内的绕制示意图。
具体实施方式
20.如图1
‑
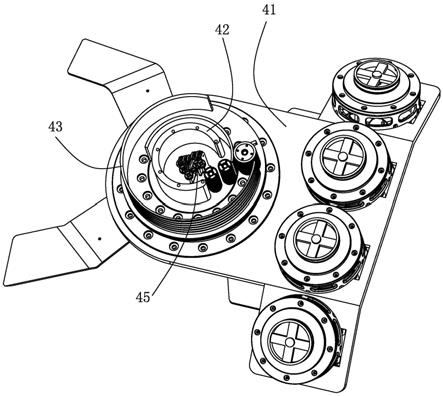
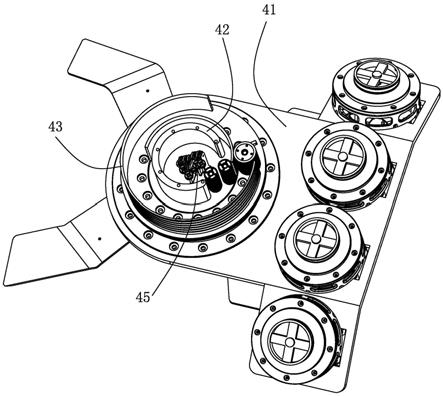
图4、图6和图8所示,一种可垂直通过钢丝绳的机械臂水平转动关节,其特征在于:包含底座41、法兰盘42、支撑盘43、差速传递机构44和钢丝绳换向轮系45;
21.法兰盘42上设置有沿轴向延伸的承接件421,承接件421上开有过渡凹槽组4211,支撑盘43上设置有沿轴向延伸的开口环形板431,支撑盘43上沿周向开有一对驱动凹槽430,开口环形板431上沿周向开有布绳凹槽组4311;
22.钢丝绳换向轮系45布置在法兰盘42和支撑盘43上,以用于将竖直方向上的变向钢丝绳组46导向至水平方向,该变向钢丝绳组46分别绕在布绳凹槽组4311、过渡凹槽组4211和钢丝绳换向轮系45上;
23.法兰盘41与差速传递机构44的输出端相连,支撑盘43与差速传递机构44的输入端相连,差速传递机构44活动安装在底座41上,以实现支撑盘43和法兰盘42同步旋转时钢丝绳换向轮系45上的变向钢丝绳组46的钢丝绳长度不变;
24.驱动法兰盘42转动的动力钢丝绳组47反向缠绕在一对驱动凹槽430内,该动力钢丝绳组47一端固定于支撑盘43上,另一端固定于电机驱动轮上。底座41固定在基座或背板上。
25.结合图1和图6说明,为保证通往垂直转动关节的钢丝绳在水平转动关节转动时长度不变,针对水平转动关节的布置方式提出以下钢丝绳布线原理,如图6所示为水平转动关节。水平转动关节安装在后背板上,有较大的横向空间,故将其布置为内外双圆盘的形式,如图6的左图所示,支撑盘43和法兰盘42通过啮合定齿轮组443可以一定传动比i进行转动。从图6的右侧图中可以看出当法兰盘42由
①
位运动到
②
位时,钢丝绳支撑盘43也运动到相应图中的位置,此时钢丝绳由实线状态变为虚线状态。从图中可以看出运动前后变化的部分为长度l1和l2,故为了使运动前后在关节上的钢丝绳总长不变需满足l1=l2。如公式(1)
‑
(3)所示,设此状态为单位时间内转动结果。可看出当条件满足时则可以实现本方案要求。
26.(θ1‑
α1)d0=α1d0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0027][0028][0029]
如图3所示,优先地,所述差速传递机构44包含回转内齿轮441、中心外齿轮442和
多个啮合定齿轮组443;回转内齿轮441可转动地设置在底座41上,回转内齿轮441的中部设置有中心外齿轮442,中心外齿轮442可转动地设置在底座41上,中心外齿轮442与回转内齿轮441之间布置有与二者相啮合的多个啮合定齿轮组443,支撑盘43与回转内齿轮441连接,法兰盘42与中心外齿轮442连接。
[0030]
为使法兰盘42能够和支撑盘43同方向旋转,通过啮合定齿轮组443将中心外齿轮442和回转内齿轮441连接起来,啮合定齿轮组通过轴承及轴安装在底座41上,可选地,每个所述啮合定齿轮组443的定齿轮数量为两个。
[0031]
如图3所示,为了使得回转内齿轮441平稳可靠运动,在外侧设计支撑圈445,所述差速传递机构44还包含支撑圈445,回转内齿轮441布置在支撑圈445内部,回转内齿轮441能相对支撑圈445转动,支撑圈445安装在底座41上。
[0032]
如图9所示,为驱动水平转动关节,将动力钢丝绳组47(例如两条钢丝绳)固定在支撑盘43的驱动凹槽430的两个固定孔上,并将动力钢丝绳组47的另一端固定于电机驱动轮上的两个固定孔中,工作时,通过电机驱动轮的旋转收拉钢丝绳来达到控制支撑盘43的转动,而支撑盘43的转动通过差速传递机构44带动法兰盘42转动,从而控制输出臂(如机械臂)在水平方向上的转动。
[0033]
进一步地,如图2和图5所示,所述钢丝绳换向轮系45包含轮架451、轴向垂直轮系452、轴向水平轮系453和轴向垂直过渡轮系;
[0034]
轮架451布置在法兰盘42内底部,轮架451上布置有轴向水平轮系453和轴向垂直轮系452,轴向水平轮系453和轴向垂直轮系452具有数量相一致的带有轮槽的换向滚轮4
‑4‑
1,所有换向滚轮4
‑4‑
1均可转动地设置在轮架451上,轴向垂直过渡轮系包含第一轮系454
‑
1和两个第二轮系454
‑
2;第一轮系454
‑
1和两个第二轮系454
‑
2上分别设置有数量相一致的带有轮槽的过渡滚轮4
‑4‑
2,第一轮系454
‑
1和两个第二轮系454
‑
2上的过渡滚轮4
‑4‑
2分别与轴向水平轮系453和轴向垂直轮系452上的换向滚轮4
‑4‑
1的数量相一致,其中,第一轮系454
‑
1布置在支撑盘43内底部,两个第二轮系454
‑
2布置在法兰盘42内底部。
[0035]
如上方案基础上,钢丝绳换向轮系45上的变向钢丝绳组46走向为:如图2、图7和图8所示:变向钢丝绳组46从驱动源水平引出,首先缠绕在布绳凹槽组4311上,并先后经第一轮系454
‑
1的过渡滚轮4
‑4‑
2、过渡凹槽组421,然后搭设在两个第二轮系451
‑
2的过渡滚轮4
‑4‑
2上,之后分别搭设在轴向垂直轮系452和轴向水平轮系453的换向滚轮4
‑4‑
1后,竖向引出至被驱动件上,实现将竖直方向上的钢丝绳导向至水平方向。图中显示为变向钢丝绳组46的钢丝绳为6条,每2条控制一个垂直关节的摆动。
[0036]
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。