1.本实用新型涉及仿真机械手技术领域,具体涉及一种仿真机械手的手指指肚结构。
背景技术:
2.仿真机械手的手指都会在指筒上设置有肚胶。现有的肚胶安装大多数采用螺丝等来固定,这使指肚的结构更复杂和安装不方便,影响指肚的安装和更换。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种仿真机械手的手指指肚结构。
4.本实用新型的技术方案如下:
5.一种仿真机械手的手指指肚结构,包括指筒、弹性金属片和肚胶,所述指筒的正面设有凹孔,所述指筒的内部于凹孔的下方的两侧设有卡槽,所述弹性金属片呈环状,其两端的底部均设有卡块,所述肚胶覆盖固定在所述弹性金属片上,所述卡块嵌入所述卡槽内使所述弹性金属片嵌在所述指筒上,所述肚胶的外边压在所述指筒上。
6.优选的是,所述卡槽呈台状,所述卡块呈台状,所述卡块伸进所述凹孔内并向外伸张滑动嵌入所述卡槽内。
7.优选的是,所述弹性金属片呈圆角矩形状。
8.优选的是,所述弹性金属片的正面和底面均呈弧形,所述指筒的正面呈弧状,所述肚胶的底面呈弧状。
9.优选的是,两个所述卡块对称分布在所述弹性金属片上。
10.优选的是,所述弹性金属性和所述肚胶一体成型。
11.相对于现有技术,本实用新型的有益效果在于:本实用新型将肚胶固定在弹性金属片上,利用弹性金属片的卡块嵌入指筒内侧的卡槽内,利用弹性金属片的卡块的弹力作用使卡块支撑在卡槽内不易脱落,从而将肚胶安装在指筒上,实现肚胶的快速安装和更换,避免了传统的螺丝固定带来的结构复杂和安装麻烦等问题,提高了效率;同时,弹性金属片呈中空环状,使肚胶得以固定,且不影响肚胶的中部的受力,有效地提高了指肚的受力灵敏度。
附图说明
12.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
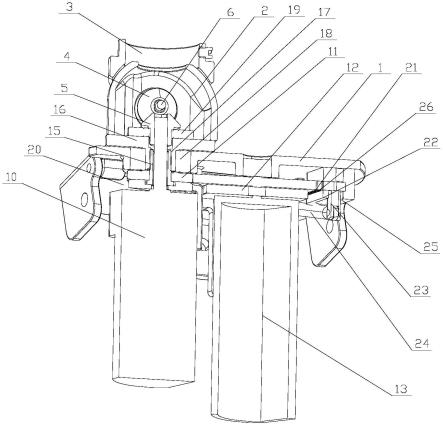
13.图1为本实用新型的仿真机械手的手指指肚结构的整体结构示意图;
14.图2为本实用新型的仿真机械手的手指指肚结构的结构分解图。
具体实施方式
15.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
16.为了说明本实用新型所述的技术方案,下面通过具体实施例来进行说明。
17.实施例1
18.如图1、图2所示,本实施例的仿真机械手的手指指肚结构包括指筒1、弹性金属片2和肚胶3,所述指筒1的正面设有凹孔11,所述指筒1的内部于凹孔11的下方的两侧设有卡槽12,所述弹性金属片2呈环状,其两端的底部均设有卡块21,所述肚胶3覆盖固定在所述弹性金属片2上,所述卡块21嵌入所述卡槽12内使所述弹性金属片2嵌在所述指筒1上,所述肚胶3的外边压在所述指筒1上。安装时,按住肚胶3的两侧使弹性金属2片向内压带动两个卡块21向内,将卡块21伸进凹孔11内,松开肚胶3,弹性金属片2在其自身弹力回复作用下使卡块21向外横移嵌入卡槽12内,从而将胶肚3固定在指筒1上;拆卸时,按下肚胶3使卡块21向内移离开卡槽12,再将肚胶3向上拔即可。本实施例的仿真机械手的手指指肚结构将肚胶固定在弹性金属片上,利用弹性金属片的卡块嵌入指筒内侧的卡槽内,利用弹性金属片的卡块的弹力作用使卡块支撑在卡槽内不易脱落,从而将肚胶安装在指筒上,实现肚胶的快速安装和更换,避免了传统的螺丝固定带来的结构复杂和安装麻烦等问题,提高了效率;同时,弹性金属片呈中空环状,使肚胶得以固定,且不影响肚胶的中部的受力,有效地提高了指肚的受力灵敏度。
19.在本实施例中,所述卡槽12呈中窄下宽的台状,所述卡块21也呈中窄下宽的台状,所述卡块21伸进所述凹孔11内并向外伸张滑动嵌入所述卡槽12内,利用台状结构来限制卡块21的竖向移动并配合弹性金属片2的弹性作用来限制卡块21的横向移动,使卡块21牢固地嵌在卡槽12内。
20.在本实施例中,所述弹性金属片2呈圆角矩形状,使弹性金属片更贴合手指的形状;所述弹性金属片2的正面和底面均呈弧形,所述指筒1的正面呈弧状,所述肚胶3的底面呈弧状,使肚胶3、弹性金属片2能更好地贴合在指筒1上。两个所述卡块21对称分布在所述弹性金属片3上,使卡块21分力更均匀,不容易胶离卡槽12。所述弹性金属性2和所述肚胶3一体成型,避免肚胶3与弹性金属片2的后期固定。
21.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种仿真机械手的手指指肚结构,其特征在于:包括指筒、弹性金属片和肚胶,所述指筒的正面设有凹孔,所述指筒的内部于凹孔的下方的两侧设有卡槽,所述弹性金属片呈环状,其两端的底部均设有卡块,所述肚胶覆盖固定在所述弹性金属片上,所述卡块嵌入所述卡槽内使所述弹性金属片嵌在所述指筒上,所述肚胶的外边压在所述指筒上。2.根据权利要求1所述的仿真机械手的手指指肚结构,其特征在于:所述卡槽呈台状,所述卡块呈台状,所述卡块伸进所述凹孔内并向外伸张滑动嵌入所述卡槽内。3.根据权利要求1或2所述的仿真机械手的手指指肚结构,其特征在于:所述弹性金属片呈圆角矩形状。4.根据权利要求1或2所述的仿真机械手的手指指肚结构,其特征在于:所述弹性金属片的正面和底面均呈弧形,所述指筒的正面呈弧状,所述肚胶的底面呈弧状。5.根据权利要求1或2所述的仿真机械手的手指指肚结构,其特征在于:两个所述卡块对称分布在所述弹性金属片上。6.根据权利要求1或2所述的仿真机械手的手指指肚结构,其特征在于:所述弹性金属片和所述肚胶一体成型。
技术总结
本实用新型公开一种仿真机械手的手指指肚结构,包括指筒、弹性金属片和肚胶,所述指筒的正面设有凹孔,所述指筒的内部于凹孔的下方的两侧设有卡槽,所述弹性金属片呈环状,其两端的底部均设有卡块,所述肚胶覆盖固定在所述弹性金属片上,所述卡块嵌入所述卡槽内使所述弹性金属片嵌在所述指筒上,所述肚胶的外边压在所述指筒上。本实用新型将肚胶固定在弹性金属片上,利用弹性金属片的卡块嵌入指筒内侧的卡槽内,利用弹性金属片的卡块的弹力作用使卡块支撑在卡槽内不易脱落,从而将肚胶安装在指筒上,实现肚胶的快速安装和更换,避免了传统的螺丝固定带来的结构复杂和安装麻烦等问题,提高了效率。提高了效率。提高了效率。
技术研发人员:韩靖
受保护的技术使用者:深圳市翰松精密技术有限公司
技术研发日:2022.01.25
技术公布日:2022/6/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。