:
1.本发明涉及自重构空间细胞机器人制造技术领域,具体的说是一种采用2k-h差动行星齿轮作为核心机械部件的两输入、单输出动力传递,可以实现将多个细胞机器人的动力聚集在一起,提供更大转矩输出的可靠性高、可任意替换、负载能力强、输出载荷可控、适应能力强的自重构空间细胞机器人的能力聚集传动装置。
背景技术:
2.传动装置作为细胞机器人的核心部件,对细胞机器人的负载能力和灵活性起着决定性作用,同时灵活性和负载能力是衡量一个细胞机器人性能的重要指标,在不降低细胞机器人灵活性的同时提高负载能力一直是科学界的一大难题。
3.细胞机器人在完成特定任务时,需要根据自身结构搭建最佳的拓扑连接。面对太空建筑搭建、在轨维修、太空搬运等任务时,由于目前传统的细胞机器人动力源固定、没有连接的原因,在形成多个细胞机器人拓扑结构时,动力输出仍然靠单个细胞完成,输出力矩受单个细胞机器人动力源与结构限制,极大的降低了拓扑的可能性、灵活性,严重影响了在轨服务质量。
技术实现要素:
4.本发明针对现有技术中存在的缺点和不足,提出了一种可实现能力聚集的细胞机器人聚集每个串联细胞机器人电机的动力,通过末端细胞机器人主轴输出、可实现能力聚集的细胞机器人不仅容易替换,而且可以实现更大转矩输出的自重构空间细胞机器人的能力聚集传动装置。
5.本发明通过以下措施达到:
6.一种自重构空间细胞机器人的能力聚集传动装置,其特征在于,包括主轴、锁紧板、细胞机器人下部外壳、动力总成下外壳、直流无框电机、行星轮、动力总成上端盖、动力总成上外壳、太阳轮齿轮、内齿圈、谐波减速器、电机输入齿轮、行星架、外齿圈、太阳轮轴、电机制动器、固定连接板、太阳轮制动器;所述主轴通过锁紧板的深沟球轴承与动力总成上外壳的轴承实现轴向固定,并通过轴端花键与行星架连接,从而实现动力传递;所述锁紧板通过四组周向均匀分布的沉头螺钉固定在细胞机器人下部外壳固定连接;所述细胞机器人下外壳通过接口对接于基座固定连接,或者通过细胞机器人接口对接于其他细胞机器人;所述固定连接板通过四组均匀分布的沉头螺钉与动力总成下外壳固定连接;所述动力总成上外壳通过沉头螺钉固定在固定连接板固定连接;所述动力总成上端盖通过三组沉头螺钉固定在动力总成上外壳固定连接,从而实现锁紧板、细胞机器人下外壳、动力总成下外壳、固定连接板、动力总成上外壳、动力总成上端盖与基座的固定连接;所述太阳轮制动器通过四组均匀分布的沉头螺钉固定在细胞机器人下球壳固定连接;所述外齿圈通过一对深沟球轴承轴向固定在固定连接板;所述内齿圈通过四组均匀分布的沉头螺钉固定于外齿圈固定连接;所述太阳轮轴通过一对深沟球轴承轴向固定在细胞机器人下部外壳,并且通过键与
太阳轮制动器周向固定连接,通过轴肩和挡圈与太阳轮轴固定连接;所述太阳轮齿轮通过键固定连接于太阳轮轴;所述行星架通过深沟球轴承轴向固定在动力总成上外壳;所述行星轮通过四根均匀分布的短轴空套在行星架轴向固定;所述直流无框电机通过四组均匀分布的沉头螺钉固定在锁紧板固定连接;所述制动器通过三组沉头螺钉固定在锁紧板固定连接;所述谐波减速器通过四组均匀分布沉头螺钉固定在动力总成上外壳固定连接;所述电机输入齿轮通过挡圈轴向固定于谐波减速器输出轴。
7.本发明主轴作为细胞机器人动力输出,作用是传递动力,通过下端花键与行星架周向固定,并通过上端偏心凸起实现与另一个细胞机器人的动力传递;锁紧板的作用是为主轴提供轴向固定定位,并且固定直流无框电机与电机制动器;细胞机器人外壳的作用是与基座通过接口固定连接,作为细胞机器人的固定基座;动力总成下外壳的作用是固定固定连接板,固定太阳轮制动器,并连接基座,从而实现固定连接板、太阳轮制动器与基座的固定;固定连接板的作用是连接动力总成下外壳与动力总成上外壳,从未实现动力总成上外壳与基座的固定,并为太阳轮、外齿圈、内齿圈提供轴向定位;动力总成上外壳的作用是固定动力总成上端盖,从而实现动力总成上端盖与基座的固定,并为行星架提供轴向固定;直流无框电机、制动器、谐波减速器的作用是提供动力并控制电机输入齿轮转动;电机输入齿轮的作用是和外齿圈啮合并带动外齿圈转动,其作为细胞机器人内部的动力输入,为能力聚集提供动力;外齿圈的作用是传递电机动力,通过与内齿圈的固定连接和与电机输入齿轮的啮合,将电机动力传递给内齿轮;内齿圈的作用是与行星轮啮合,作为行星齿轮的输入齿轮,为行星轮的自转与公转提供动力;行星架的作用是轴向固定行星轮,本实施方案中通过与基座的轴向固定可使行星轮具有自转与公转能力,其通过花键与主轴周向固定,为主轴提供动力;行星轮的作用是与内齿圈和太阳轮齿轮啮合,通过公转带动行星架转动;太阳轮齿轮的作用是与行星轮啮合,作为细胞机器人的外部动力输入,为行星轮公转与自转提供动力,其与内齿圈共同带动行星轮公转,通过差动行星轮运行原理实现能力聚集;太阳轮轴的作用是传递细胞机器人外部动力,本实施方案中通过偏心轴与前一个细胞机器人的主轴对接,传递前一个细胞机器人的动力,其通过键与太阳轮齿轮进行固定。
8.本发明通过动力总成传动装置聚集串联的所有细胞机器人动力。细胞机器人串联体工作时,串联体始端细胞机器人太阳轮轴通过制动器与细胞机器人下球壳固定,使始端细胞机器人太阳轮齿轮与基座固定,串联体中直流无框电机通过输出轴带动电机输入齿轮转动,使带动与行星轮啮合的内齿圈转动,始端细胞机器人主轴转动,由于始端细胞机器人主轴与串联体中第二个细胞机器人太阳轮轴周向固定,始端细胞机器人主轴与第二个细胞机器人直流无框电机在第二个细胞机器人动力总成中能力聚集,以更大的力矩带动第二个细胞机器人主轴转动。多个动力合成装置联用时,可以得到不同的输出力矩与转速。
9.本发明与其他现有技术相比的有益效果是:以2k-h差动行星轮为基础,直流无框电机为驱动,占用体积小,输出转矩高。通过细胞机器人对接的方式实现对接细胞机器人能力聚集。采用上述方案,可以通过增减对接细胞机器人数量,实现增减末端输出转矩,控制简单,保证了精度要求。本发明相比与其他细胞机器人技术的最大有益效果是,能力聚集传动装置使得每个细胞机器人的能力得到最大程度发挥,细胞机器人组合的拓扑能力因此大大提高,同时保证了细胞机器人的灵活性;其应用在细胞机器人中具有灵活性好、可靠性强、方便更换、控制简单等优点。
附图说明:
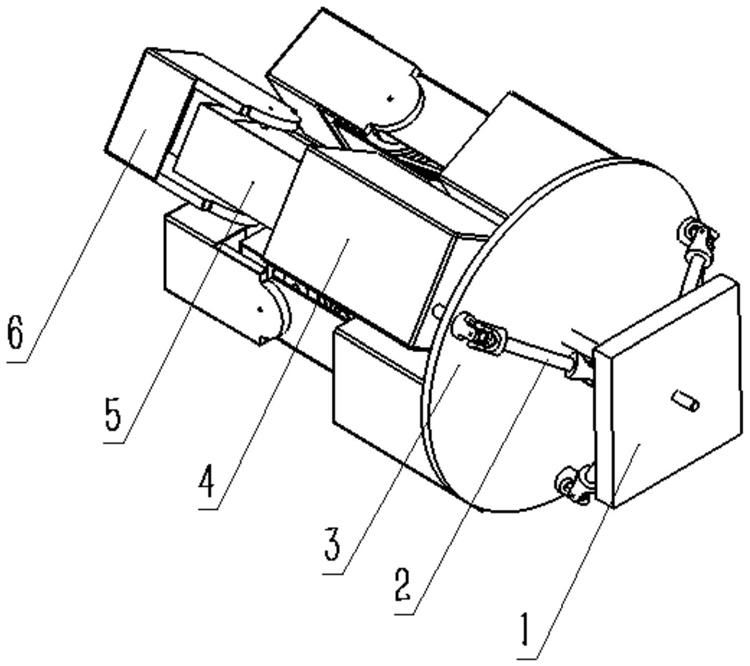
10.附图1是本发明应用于细胞机器人的装配图。
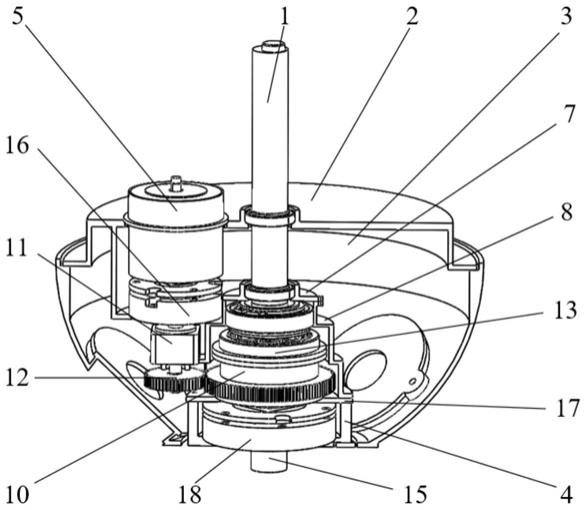
11.附图2是本发明的内部图。
12.附图3是本发明行星架与行星轮装配图。
13.附图4是本发明的外部图。
14.附图5是本发明中两细胞机器人串联示意图。
15.附图6是本发明中细胞机器人串联机械臂外观图。
16.附图标记:主轴(1)、锁紧板(2)、细胞机器人下部外壳(3)、动力总成下外壳(4)、直流无框电机(5)、行星轮(6)、动力总成上端盖(7)、动力总成上外壳(8)、太阳轮齿轮(9)、内齿圈(10)、谐波减速器(11)、电机输入齿轮(12)、行星架(13)、外齿圈(14)、太阳轮轴(15)、电机制动器(16)、固定连接板(17)、太阳轮制动器(18)。
具体实施方式:
17.下面结合附图,对本发明作进一步的说明。
18.实施例1:
19.一种自重构空间细胞机器人的能力聚集传动装置设计包括主轴(1)、锁紧板(2)、细胞机器人下部外壳(3)、动力总成下外壳(4)、直流无框电机(5)、行星轮(6)、动力总成上端盖(7)、动力总成上外壳(8)、太阳轮齿轮(9)、内齿圈(10)、谐波减速器(11)、电机输入齿轮(12)、行星架(13)、外齿圈(14)、太阳轮轴(15)、电机制动器(16)、固定连接板(17)、太阳轮制动器(18);所述主轴(1)通过锁紧板(2)的深沟球轴承与动力总成上外壳(4)的轴承实现轴向固定,并通过轴端花键与行星架(13)连接,从而实现动力传递;所述锁紧板(2)通过四组周向均匀分布的沉头螺钉固定在细胞机器人下部外壳(3)固定连接;所述细胞机器人下外壳(3)通过细胞机器人接口对接于基座固定连接,或者通过细胞机器人接口对接于其他细胞机器人;所述动力总成下外壳(4)通过三组均匀分布沉头螺钉固定在细胞机器人下部外壳(3)固定连接;所述固定连接板(17)通过四组均匀分布的沉头螺钉与动力总成下外壳(4)固定连接;所述动力总成上外壳(8)通过沉头螺钉固定在固定连接板(17)固定连接;所述动力总成上端盖(7)通过三组沉头螺钉固定在动力总成上外壳(8)固定连接,从而实现锁紧板(2)、细胞机器人下外壳(3)、动力总成下外壳(4)、固定连接板(17)、动力总成上外壳(8)、动力总成上端盖(7)与基座的固定连接;所述太阳轮制动器(18)通过四组均匀分布的沉头螺钉固定在细胞机器人下球壳(3)固定连接;所述外齿圈(14)通过一对深沟球轴承轴向固定在固定连接板(17);所述内齿圈(10)通过四组均匀分布的沉头螺钉固定于外齿圈(14)固定连接;所述太阳轮轴(15)通过一对深沟球轴承轴向固定在细胞机器人下部外壳(3),并且通过键与太阳轮制动器(18)周向固定连接,通过轴肩和挡圈与太阳轮轴(15)固定连接;所述太阳轮齿轮(9)通过键与挡圈固定连接于太阳轮轴(15);所述行星架(13)通过深沟球轴承轴向固定在动力总成上外壳(8);所述行星轮(6)通过四根均匀分布的短轴空套在行星架(13)轴向固定;所述直流无框电机(5)通过四组均匀分布的沉头螺钉固定在锁紧板(2)固定连接;所述电机制动器(16)通过三组沉头螺钉固定在锁紧板(2)固定连接;所述谐波减速器(11)通过四组均匀分布沉头螺钉固定在动力总成上外壳(8)固定连接;所述电机输入齿轮(12)通过挡圈轴向固定于谐波减速器输出轴。
20.本实施方案中的主轴(1)作为细胞机器人动力输出,其作用是传递动力,通过下端花键与行星架(13)周向固定,并通过上端偏心凸起实现与另一个细胞机器人的动力传递;锁紧板(2)的作用是为主轴(1)提供轴向固定定位,并且固定直流无框电机(5)与电机制动器(16);细胞机器人外壳的作用是与基座通过接口固定连接,作为细胞机器人的固定基座;动力总成下外壳(4)的作用是固定固定连接板(17),固定太阳轮制动器(18),并连接基座,从而实现固定连接板(17)、太阳轮制动器(18)与基座的固定;固定连接板(17)的作用是连接动力总成下外壳(4)与动力总成上外壳(8),从未实现动力总成上外壳(8)与基座的固定,并为太阳轮(9)、外齿圈(14)、内齿圈(10)提供轴向定位;动力总成上外壳(8)的作用是固定动力总成上端盖(7),从而实现动力总成上端盖(7)与基座的固定,并为行星架(13)提供轴向固定;
21.直流无框电机(5)、电动机制动器(16)、谐波减速器(11)的作用是提供动力并控制电机输入齿轮(12)转动;电机输入齿轮(12)的作用是和外齿圈(14)啮合并带动外齿圈(14)转动,其作为细胞机器人内部的动力输入,为能力聚集提供动力;外齿圈(14)的作用是传递电机动力,本实施方案中通过与内齿圈(10)的固定连接和与电机输入齿轮(12)的啮合,将电机动力传递给内齿轮;内齿圈(10)的作用是与行星轮(6)啮合,作为行星轮(6)的输入齿轮,为行星轮(6)的自转与公转提供动力;行星架(13)的作用是轴向固定行星轮(6),本实施方案中通过与基座的轴向固定可使行星轮(6)具有自转与公转能力,其通过花键与主轴(1)周向固定,为主轴(1)提供动力;行星轮的作用是与内齿圈(10)和太阳轮齿轮(9)啮合,通过公转带动行星架转动;太阳轮齿轮的作用是与行星轮啮合,作为细胞机器人的外部动力输入,为行星轮公转与自转提供动力,其与内齿圈(10)共同带动行星轮公转,通过差动行星轮运行原理实现能力聚集;太阳轮轴(15)的作用是传递细胞机器人外部动力,本实施方案中通过偏心轴与前一个细胞机器人的主轴对接,传递前一个细胞机器人的动力,其通过键与太阳轮齿轮(9)进行固定。
22.本例在工作过程如下:执行任务前,少量细胞机器人在航天器上进行预搭建,通过接口使始端细胞机器人下球壳与基座固定。根据任务所需力矩大小,计算机控制细胞机器人重构和优化,形成串联体以提高输出转矩,串联体通过控制器控制直流无框电机启动与制动。当细胞机器人传递动力时,串联体始端细胞机器人太阳轮轴通过太阳轮制动器与细胞机器人下球壳固定,使始端细胞机器人太阳轮齿轮固定,串联体中直流无框电机通过输出轴带动电机输入齿轮转动,带动与行星轮啮合的内齿圈转动,始端细胞机器人主轴周向转动,由于始端细胞机器人主轴与串联体中第二个细胞机器人太阳轮轴周向固定,始端细胞机器人通过主轴将动力传递给第二个细胞机器人太阳轮轴,始端细胞机器人主轴与第二个细胞机器人直流无框电机能力聚集,以更大的力矩带动第二个细胞机器人主轴转动。同理,第二个细胞机器人的主轴以同样的方式与第三个细胞机器人的直流无框电机实现能力聚集,以第三个细胞机器人主轴输出。最终,串联体中所有细胞机器人的直流无框电机能力聚集,通过末端细胞机器人主轴输出更大的力矩。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。