技术特征:
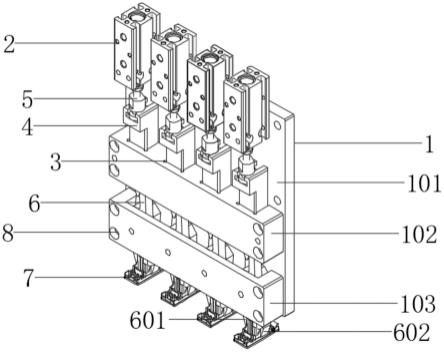
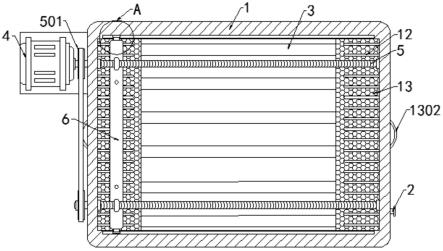
1.一种多工位简易夹具机构,其特征在于,包括固定机构(1)和夹紧机构(6),所述固定机构(1)由安装板(101)、一号固定座(102)和二号固定座(103)组合构成,所述安装板(101)的正面固定安装有一号固定座(102),所述安装板(101)的正面且位于一号固定座(102)的下方固定安装有二号固定座(103),所述安装板(101)的正面上端固定安装有若干个气缸(2),所述一号固定座(102)上设置有若干个滑块(4),所述气缸(2)和滑块(4)的数量和位置相对应,所述二号固定座(103)上设置有若干个夹紧机构(6),所述夹紧机构(6)与滑块(4)的数量和位置相对应,所述一号固定座(102)和二号固定座(103)均通过固定螺栓(8)与安装板(101)固定连接。2.根据权利要求1所述的一种多工位简易夹具机构,其特征在于,所述夹紧机构(6)由一号夹手(601)、二号夹手(602)、弹簧(603)和楔形槽(604)组合构成。3.根据权利要求1所述的一种多工位简易夹具机构,其特征在于,所述夹紧机构(6)的上端开设有楔形槽(604),所述夹紧机构(6)的下端一侧设置有一号夹手(601),所述夹紧机构(6)的下端另一侧设置有二号夹手(602),所述一号夹手(601)和二号夹手(602)之间固定安装有弹簧(603)。4.根据权利要求1所述的一种多工位简易夹具机构,其特征在于,所述一号固定座(102)上开设有滑槽(3),所述滑块(4)嵌入在滑槽(3)内且与滑槽(3)滑动连接,所述滑块(4)的顶部固定安装有浮动接头(5),所述浮动接头(5)与气缸(2)的底部固定连接。5.根据权利要求3所述的一种多工位简易夹具机构,其特征在于,每个所述夹紧机构(6)的下端均设置有工位(7),所述工位(7)位于一号夹手(601)和二号夹手(602)之间,所述工位(7)位于一号夹手(601)和二号夹手(602)之间的正下方,所述滑块(4)的底部固定安装有嵌入块(9),所述嵌入块(9)与楔形槽(604)相适配契合。
技术总结
本实用新型公开了一种多工位简易夹具机构,包括固定机构和夹紧机构,固定机构由安装板、一号固定座和二号固定座组合构成,安装板的正面固定安装有一号固定座,安装板的正面且位于一号固定座的下方固定安装有二号固定座,安装板的正面上端固定安装有若干个气缸,一号固定座上设置有若干个滑块,通过在小空间范围内设置微型气缸,利用微型气缸推动滑块的移动,进而由滑块底部的嵌入块对夹紧机构顶部的楔形槽进行抵触,从而使一号夹手和二号夹手张开,使之能够对工位上的物件进行抓取,由于每个夹紧机构对应一个工位,由于所需空间范围较小,避免了使用气缸夹爪进行抓取,且每个工位均独立,从而实现小空间内的多工位抓取。从而实现小空间内的多工位抓取。从而实现小空间内的多工位抓取。
技术研发人员:唐严清 朱涛 吴建亭 黄学敏 周艺龙 杨东明 陈华锦 袁进 王鑫
受保护的技术使用者:中铭谷智能机器人(广东)有限公司
技术研发日:2021.12.23
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。