1.本发明是一种高精度振动喂料机控制系统及方法,属于喂料机技术领域。
背景技术:
2.喂料机又称给料机,主要是把物料从贮料仓或其它贮料设备中均匀或定量的供给到受料设备中,是实行流水作业自动化的必备设备,目前喂料机一般采用振动方式进行上料,在使用时,先控制贮料仓或其它贮料设备向外输送物料,并使物料分流到多个输送管路上,然后汇集到临时储存设备内,一般采用测距传感器,检测临时储存设备内物料高度,从而计算出临时储存设备内物料量,从而检测供给的物料量,但是输送管路向临时储存设备内输送物料过程中,会使物料易在临时储存设备内发生拱起现象,从而使测距传感器的检测质量较差,进而影响喂料精度,因此,需要设计一种高精度振动喂料机控制系统及方法来解决上述问题。
3.本
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种高精度振动喂料机控制系统及方法。
5.本发明解决其技术问题所采用的技术方案是:一种高精度振动喂料机控制系统,包括基板,所述基板前端上侧安装横向布置的输送设备,所述输送设备下端等距连通安装多个竖向布置的带执行器的连接管,所述连接管下端连通固定上窄下宽布置的锥形柔性管,所述锥形柔性管下端固定连接临时储存箱并与临时储存箱连通布置,所述临时储存箱下端连通安装带执行器的排料管,所述排料管下端设置防堵组件且防堵组件延伸入排料管内部,所述基板后端固定连接振动机的固定部,所述振动机的活动部贯穿基板并与横向布置的固定板连接,所述固定板前端等距固定连接多个临时储存箱,所述临时储存箱内部固定连接中空异形架,所述中空异形架下端均匀安装多个检测设备。
6.进一步地,所述输送设备下端左侧边缘位置连通安装回料管,所述回料管下端连通设置用于回收物料的收集罐。
7.进一步地,所述振动机左右两侧均等距安装多个导向件且导向件固定在固定板后端,所述导向件贯穿基板并与基板滑动连接。
8.进一步地,所述临时储存箱内部上侧安装左高右低倾斜布置的筛网且筛网处在中空异形架上侧。
9.进一步地,所述临时储存箱右端开设与筛网连通布置的出口,所述临时储存箱右端固定连接用于回收杂物的收集盒且收集盒通过出口与临时储存箱连通。
10.进一步地,所述收集盒下端前侧边缘位置连通固定带开关阀的排杂管,所述收集盒内部底端前低后高布置的锥形块且锥形块处在排杂管与收集盒连接位的后端。
11.进一步地,所述防堵组件包括活动设置在排料管内部的螺旋绞龙,所述螺旋绞龙下端中间位置固定连接杆,且连接杆设置在排料管内并延伸出排料管下侧,所述连接杆外端上侧边缘位置安装第二轴承的内圈,所述第二轴承的外圈外端等距固定连接呈圆形布置的多个固定杆且多个固定杆均固定在排料管内壁上。
12.进一步地,所述连接杆下端设置上窄下宽布置的锥形壳并延伸入锥形壳内,且锥形壳固定在处在排料管下方的料槽内部底端,所述连接杆下端固定连接齿轮且齿轮处在锥形壳内,所述齿轮外端啮合纵向布置的齿条,且齿条固定在锥形壳内部侧壁下方边缘位置。
13.进一步地,所述锥形壳上端开口安装弧形弹性垫,所述连接杆外端固定连接第一轴承的内圈且第一轴承处在第二轴承下侧,所述第一轴承的外圈下端固定弧形弹性垫且第一轴承的外圈下端穿过弧形弹性垫。
14.一种高精度振动喂料机控制方法,具体包括以下步骤:
15.s1、开启,启动控制终端,控制终端启动输送设备、连接管上的执行器、振动机以及检测设备,从而使输送设备、振动机以及检测设备工作,同时使连接管上的执行器打开;
16.s2、上料,向输送设备的料斗内投放物料,并使物料进入输送设备内,然后物料在输送设备内向左移动,然后分流到多个连接管内,并利用连接管,将物料输送到临时储存箱内;
17.s3、筛选,进入临时储存箱内的物料先掉落到筛网上,其时振动机会驱动临时储存箱发生前后运动的振动,并使筛网进行前后运动的振动,进而利用筛网对物料进行筛选,从而将物料中杂物进行阻挡,并使阻挡的杂物沿着筛网向右滚动,再使阻挡的杂物通过出口进入收集盒内;
18.s4、定量,筛选后的物料掉落在临时储存箱内部底端,并在临时储存箱内部底端发生堆积,同时临时储存箱的前后运动的振动,会对临时储存箱内部底端堆积的物料进行振平处理,此时检测设备,对临时储存箱内部底端堆积的物料进行检测,并将检测出的数据传输给控制终端进行数据运算,从而计算出临时储存箱内物料量,当物料量达到需求时,控制终端控制连接管上的执行器关闭,从而使连接管停止向临时储存箱内输送物料;
19.s5、喂料,当物料量达到需求时,控制终端控制排料管上的执行器打开,从而使临时储存箱内堆积的物料通过排料管向料槽内投放物料,同时临时储存箱前后运动的振动会使排料管发生前后运动的振动,进而使连接杆进行前后运动,从而使齿轮沿着齿条前后移动,并在齿条作用下,会使齿轮旋转,进而使连接杆旋转,从而使螺旋绞龙在排料管内进行旋转,有效避免排料管内发生堵塞,使临时储存箱内堆积的物料完全投放到料槽内;
20.s6、补料,当某个临时储存箱内检测的数据未达到设计数据前,在编辑的时间中检测数据未发生变化时,控制终端会启动相应的预警器,用于提醒上料的物料量未满足喂料需求,从而重新向输送设备内投放物料,而输送设备内残留的物料会通过回料管输送到收集罐内,达到物料回收。
21.本发明的有益效果:(1)本发明的一种高精度振动喂料机控制系统,通过连接管将管式螺旋输送机内物料输送到临时储存箱内,并使物料掉落在临时储存箱内部底端,再利用测距传感器,对临时储存箱内部底端堆积的物料进行检测,同时利用振动机、固定板,会对临时储存箱内部底端堆积的物料进行振平处理,提升测距传感器检测质量,达到对喂料的物料量进行精确定量的目的,提升喂料精度。
22.(2)本发明的一种高精度振动喂料机控制系统,利用管式螺旋输送机,将物料向左移动,并分流到多个连接管内,并利用连接管,将物料输送到临时储存箱内,并利用临时储存箱对物料进行定量,定量完成后,打开排料管上的电磁控制阀,临时储存箱内物料通过排料管向料槽进行投放。
23.(3)本发明的一种高精度振动喂料机控制系统,利用振动机会驱动临时储存箱发生前后运动的振动,并使筛网进行前后运动的振动,进而利用筛网对物料进行筛选,从而将物料中杂物进行阻挡,并使阻挡的杂物沿着筛网向右滚动,再使阻挡的杂物通过出口进入收集盒内,达到对物料进行筛选的目的,适用性好。
24.(4)本发明的一种高精度振动喂料机控制系统,临时储存箱前后运动的振动会使排料管发生前后运动的振动,进而使连接杆进行前后运动,从而使齿轮沿着齿条前后移动,并在齿条作用下,会使齿轮旋转,进而使连接杆旋转,从而使螺旋绞龙在排料管内进行旋转,有效避免排料管内发生堵塞,使临时储存箱内堆积的物料完全投放到料槽内,适用性好。
附图说明
25.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
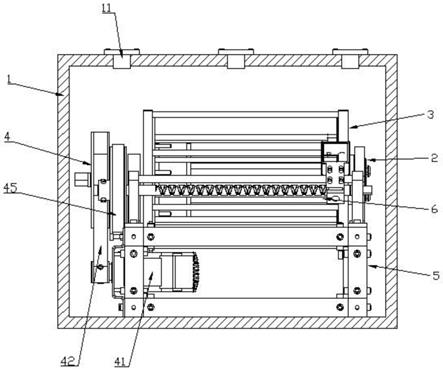
26.图1为本发明一种高精度振动喂料机控制系统的结构示意图;
27.图2为本发明图1中a部放大图;
28.图3为本发明一种高精度振动喂料机控制系统中罐体的剖视图;
29.图4为图3中b部放大图;
30.图5为图3中c部放大图;
31.图6为本发明一种高精度振动喂料机控制系统中凸轮与中空杆的装配图;
32.图中:1、管式螺旋输送机,2、基板,3、固定板,4、防堵组件,5、排料管,6、临时储存箱,7、锥形柔性管,8、连接管,9、振动机,11、回料管,12、收集罐,31、圆杆,41、螺旋绞龙,42、弧形弹性垫,43、锥形壳,44、齿条,45、齿轮,46、连接杆,47、第一轴承,48、固定杆,49、第二轴承,61、筛网,62、中空异形架,63、测距传感器,64、收集盒,65、出口。
具体实施方式
33.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
34.请参阅图1,本发明提供一种技术方案:一种高精度振动喂料机控制系统,包括基板2,通过基板2,为输送设备以及振动机9提供安装载体,基板2前端上侧安装横向布置的输送设备,通过输送设备,能将物料向左移动,输送设备可采用管式螺旋输送机1,输送设备下端等距连通安装多个竖向布置的带执行器的连接管8,多个连接管8配合使用,实现分流输送,进而向临时储存箱6内输送物料,输送设备下端左侧边缘位置连通安装回料管11,通过回料管11,将输送设备内剩余物料输送到收集罐12内,回料管11下端连通设置用于回收物料的收集罐12,通过收集罐12,能对剩余物料进行收集,连接管8下端连通固定上窄下宽布置的锥形柔性管7,通过锥形柔性管7,一方面使连接管8与临时储存箱6连通,另一方面使连接管8与临时储存箱6前后交错循环运动,锥形柔性管7下端固定连接临时储存箱6并与临时储存箱6连通布置,通过临时储存箱6,能对物料进行定量,临时储存箱6下端连通安装带执行器的排料管5,通过排料管5,向料槽内投放物料,此外排料管5上的执行器可采用电磁控制阀。
35.具体地,先启动管式螺旋输送机1以及连接管8上的电磁控制阀,然后向管式螺旋输送机1的料斗内投放物料,并使物料进入管式螺旋输送机1内,然后物料在管式螺旋输送机1的管部内向左移动,然后分流到多个连接管8内,并利用连接管8,将物料输送到临时储存箱6内,并利用临时储存箱6对物料进行定量,定量完成后,打开排料管5上的电磁控制阀,临时储存箱6内物料通过排料管5向料槽进行投放。
36.如图3和图5所示,基板2后端固定连接振动机9的固定部,通过振动机9,能使固定板3前后运动的振动,振动机9的活动部贯穿基板2并与横向布置的固定板3连接,通过固定板3,为临时储存箱6提供安装载体,振动机9左右两侧均等距安装多个导向件且导向件固定在固定板3后端,通过导向件,一方面增加固定板3与基板2之间稳定连接,另一方面对固定板3移动进行导向,导向件可采用圆杆31,导向件贯穿基板2并与基板2滑动连接,固定板3前端等距固定连接多个临时储存箱6,临时储存箱6内部固定连接中空异形架62,通过中空异形架62,为检测设备提供安装载体和保护,中空异形架62下端均匀安装多个检测设备,通过检测设备,对临时储存箱6内物料进行测量,检测设备可采用测距传感器63。
37.具体地,通过连接管8将管式螺旋输送机1内物料输送到临时储存箱6内,并使物料掉落在临时储存箱6内部底端,并在临时储存箱6内部底端发生堆积,此时测距传感器63,对临时储存箱6内部底端堆积的物料进行检测,并将检测出的数据传输给控制终端进行数据运算,从而计算出临时储存箱6内物料量,其中控制终端可采用uno-2172-c22e控制器,同时启动振动机9,从而使固定板3以及临时储存箱6的前后运动的振动,会对临时储存箱6内部底端堆积的物料进行振平处理,提升测距传感器63检测质量,当物料量达到需求时,控制终端控制连接管8上的电磁控制阀关闭,从而使连接管8停止向临时储存箱6内输送物料,达到对喂料的物料量进行精确定量的目的,提升喂料精度。
38.如图1、图3和图4所示,临时储存箱6内部上侧安装左高右低倾斜布置的筛网61且筛网61处在中空异形架62上侧,通过筛网61,对物料进行筛选,临时储存箱6右端开设与筛网61连通布置的出口65,通过出口65,将筛网61上筛选出的杂质输送到收集盒64内,临时储存箱6右端固定连接用于回收杂物的收集盒64且收集盒64通过出口65与临时储存箱6连通,通过收集盒64,对筛选的杂物进行收集,收集盒64下端前侧边缘位置连通固定带开关阀的排杂管,通过排杂管,将收集盒64内收集的杂质排出,收集盒64内部底端前低后高布置的锥形块且锥形块处在排杂管与收集盒64连接位的后端,通过锥形块,能将收集盒64内杂物向排杂管与收集盒64连接位进行汇集,方便后续排出作业。
39.具体地,通过连接管8将管式螺旋输送机1内物料输送到临时储存箱6内,进入临时储存箱6内的物料先掉落到筛网61上,其时振动机9会驱动临时储存箱6发生前后运动的振动,并使筛网61进行前后运动的振动,进而利用筛网61对物料进行筛选,从而将物料中杂物进行阻挡,并使阻挡的杂物沿着筛网61向右滚动,再使阻挡的杂物通过出口65进入收集盒64内,达到对物料进行筛选的目的,适用性好,当喂料完成后,能打开排杂管上的开关阀,从而使收集盒64内收集的杂物排出。
40.如图1和图5所示,排料管5内部活动设置螺旋绞龙41,通过螺旋绞龙41,避免排料管5内发生堵塞,螺旋绞龙41下端中间位置固定连接杆46,通过连接杆46,为螺旋绞龙41提供安装载体,且连接杆46设置在排料管5内并延伸出排料管5下侧,连接杆46外端上侧边缘位置安装第二轴承49的内圈,第二轴承49的外圈外端等距固定连接呈圆形布置的多个固定
杆48且多个固定杆48均固定在排料管5内壁上,固定杆48与第二轴承49配合使用,使连接杆46与排料管5之间转动连接,连接杆46下端设置上窄下宽布置的锥形壳43并延伸入锥形壳43内,且锥形壳43固定在处在排料管5下方的料槽内部底端,通过锥形壳43,一方面为齿条44以及齿轮45提供安装空间,能对齿条44以及齿轮45进行保护,锥形壳43上端开口安装弧形弹性垫42,通过弧形弹性垫42,一方面对锥形壳43上端开口进行封堵,避免物料进入锥形壳43内,另一方面可使连接杆46以及第一轴承47前后运动,连接杆46外端固定连接第一轴承47的内圈且第一轴承47处在第二轴承49下侧,第一轴承47的外圈下端固定弧形弹性垫42且第一轴承47的外圈下端穿过弧形弹性垫42,连接杆46下端固定连接齿轮45且齿轮45处在锥形壳43内,齿轮45外端啮合纵向布置的齿条44,齿轮45与齿条44配合使用,使连接杆46转动,且齿条44固定在锥形壳43内部侧壁下方边缘位置。
41.具体地,当物料量达到需求时,打开排料管5上的电磁控制阀,从而使临时储存箱6内堆积的物料通过排料管5向料槽内投放物料,同时临时储存箱6前后运动的振动会使排料管5发生前后运动的振动,进而使连接杆46进行前后运动,从而使齿轮45沿着齿条44前后移动,并在齿条44作用下,会使齿轮45旋转,进而使连接杆46旋转,从而使螺旋绞龙41在排料管5内进行旋转,有效避免排料管5内发生堵塞,使临时储存箱6内堆积的物料完全投放到料槽内,适用性好。
42.一种高精度振动喂料机控制方法,具体包括以下步骤:
43.s1、开启,启动控制终端,控制终端启动管式螺旋输送机1、连接管8上的电磁控制阀、振动机9以及测距传感器63,从而使管式螺旋输送机1、振动机9以及测距传感器63工作,同时使连接管8上的电磁控制阀打开;
44.s2、上料,向管式螺旋输送机1的料斗内投放物料,并使物料进入管式螺旋输送机1内,然后物料在管式螺旋输送机1内向左移动,然后分流到多个连接管8内,并利用连接管8,将物料输送到临时储存箱6内;
45.s3、筛选,进入临时储存箱6内的物料先掉落到筛网61上,其时振动机9会驱动临时储存箱6发生前后运动的振动,并使筛网61进行前后运动的振动,进而利用筛网61对物料进行筛选,从而将物料中杂物进行阻挡,并使阻挡的杂物沿着筛网61向右滚动,再使阻挡的杂物通过出口65进入收集盒64内;
46.s4、定量,筛选后的物料掉落在临时储存箱6内部底端,并在临时储存箱6内部底端发生堆积,同时临时储存箱6的前后运动的振动,会对临时储存箱6内部底端堆积的物料进行振平处理,此时测距传感器63,对临时储存箱6内部底端堆积的物料进行检测,并将检测出的数据传输给控制终端进行数据运算,从而计算出临时储存箱6内物料量,当物料量达到需求时,控制终端控制连接管8上的电磁控制阀关闭,从而使连接管8停止向临时储存箱6内输送物料;
47.s5、喂料,当物料量达到需求时,控制终端控制排料管5上的电磁控制阀打开,从而使临时储存箱6内堆积的物料通过排料管5向料槽内投放物料,同时临时储存箱6前后运动的振动会使排料管5发生前后运动的振动,进而使连接杆46进行前后运动,从而使齿轮45沿着齿条44前后移动,并在齿条44作用下,会使齿轮45旋转,进而使连接杆46旋转,从而使螺旋绞龙41在排料管5内进行旋转,有效避免排料管5内发生堵塞,使临时储存箱6内堆积的物料完全投放到料槽内;
48.s6、补料,当某个临时储存箱6内检测的数据未达到设计数据前,在编辑的时间中检测数据未发生变化时,控制终端会启动相应的预警器,用于提醒上料的物料量未满足喂料需求,从而重新向管式螺旋输送机1内投放物料,而管式螺旋输送机1内残留的物料会通过回料管11输送到收集罐12内,达到物料回收。
49.本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。