1.本发明涉及建筑设备技术领域,具体而言,涉及一种翻板机构及物料铺贴设备。
背景技术:
2.翻板是一款很新颖很独特的非标自动化结构,主要是通过滚轮滚筒机构来实现自动化产线上对产品的翻转。
3.目前市面上大部分的翻板均是复合板在传送皮带上平稳运动,在进行翻板时通过夹板对翻转的产品进行夹取,但是现有的翻板无法保证产品翻转到位,翻转效率有待提升,自动化程度亦有待提升。
技术实现要素:
4.本发明实施例的目的在于提供一种翻板机构及物料铺贴设备,以解决上述问题。本发明实施例通过以下技术方案来实现上述目的。
5.第一方面,本发明实施例提供一种翻板机构,包括翻板支架、传感器和驱动组件。翻板支架包括物料承载区,并具有输送工作位置和抓取工作位置,当物料输送到物料承载区时,翻板支架由输送工作位置转动至抓取工作位置。传感器安装于翻板支架,并位于物料承载区,用于在抓取工作位置感测位于物料承载区的物料,当传感器感测不到物料承载区的物料时产生物料移除感测信号。驱动组件连接于翻板支架,驱动组件基于物料移除感测信号驱动翻板支架从抓取工作位置转动至输送工作位置。
6.在一种实施方式中,翻板机构还包括输送组件,输送组件安装于翻板支架,输送组件在翻板支架处于输送工作位置时进行物料输送。翻板支架处于输送工作位置时,进行物料输送。
7.在一种实施方式中,翻板支架还包括进料端,进料端位于物料承载区的一侧,翻板机构还包括进料辅助传感器,进料辅助传感器安装于进料端,进料辅助传感器用于在输送工作位置感测进料端的物料,当进料辅助传感器感测进料端有物料时产生物料进入感测信号,输送组件基于物料进入感测信号进行输送。输送组件在进料辅助传感器感测进料端有物料时进行物料输送。
8.在一种实施方式中,当进料辅助传感器感测不到进料端的物料时产生物料到达感测信号,输送组件基于物料到达感测信号停止输送,驱动组件基于物料达到感测信号驱动翻板支架从输送工作位置转动至抓取工作位置。驱动组件在进料辅助传感器感测不到进料端的物料时驱动翻板支架从输送工作位置转动至抓取工作位置。
9.在一种实施方式中,翻板机构还包括阻挡组件,阻挡组件安装于进料端,阻挡组件具有阻挡状态和非阻挡状态,阻挡组件基于物料达到感测信号呈阻挡状态,以阻挡物料移动至物料承载区外。阻挡组件在物料达到时呈阻挡状态,避免物料掉落。
10.在一种实施方式中,阻挡组件基于物料移除感测信号呈非阻挡状态。阻挡组件在物料被移除时呈非阻挡状态,避免影响物料输送。
11.在一种实施方式中,阻挡组件包括阻挡件和阻挡件驱动电机,阻挡件安装于进料端,阻挡件驱动电机安装于翻板支架,并与阻挡件传动连接,以驱动阻挡件在阻挡状态和非阻挡状态之间切换。
12.在一种实施方式中,驱动组件在阻挡组件呈阻挡状态后驱动翻板支架从输送工作位置转动至抓取工作位置。驱动组件在阻挡组件呈阻挡状态后驱动翻板支架从输送工作位置转动至抓取工作位置。
13.在一种实施方式中,翻板机构还包括固定架,翻板支架可转动地安装于固定架,驱动组件为推杆,推杆包括相连接的缸体和活塞杆,缸体安装于固定架,活塞杆远离缸体的一端铰接于翻板支架。驱动组件为推杆,推杆推动翻板支架翻转。
14.第二方面,本发明实施例还提供一种物料铺贴设备,包括机架、定位夹紧机构、抓取机构及上述任一翻板机构。翻板机构安装于机架。定位夹紧机构安装于机架,并将物料输送至翻板支架。抓取机构安装于支架,并用于抓取处于抓取工作位置的翻板支架上的物料。
15.在一种实施方式中,定位夹紧机构包括上料端和下料端,上料端与下料端相对,翻板支架设置于下料端。便于定位夹紧与翻转的并形。
16.相较于现有技术,本发明提供的翻板机构及物料铺贴设备,翻板机构包括翻板支架、传感器和驱动组件,其中,翻板支架包括物料承载区,并具有输送工作位置和抓取工作位置,传感器安装于翻板支架,并位于物料承载区,当传感器感测不到物料承载区的物料时产生物料移除感测信号,驱动组件连接于翻板支架,并且基于物料移除感测信号驱动翻板支架从抓取工作位置转动至输送工作位置,通过传感器在感测不到物料承载区的物料时产生物料移除感测信号,并且驱动组件基于物料移除感测信号驱动翻板支架从抓取工作位置转动至输送工作位置,实现了翻板支架的及时复位(即回复至输送工作位置),提升了翻板支架的翻转效率,进而提升了翻板机构及物料铺贴设备的自动化程度。
17.本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。
附图说明
18.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
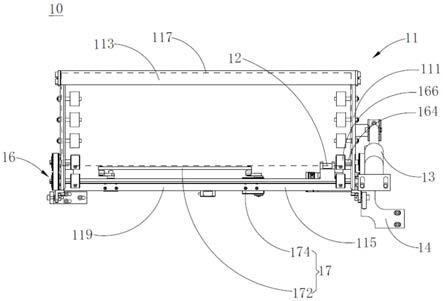
19.图1是本发明实施例提供的翻板机构在一种视角下的结构示意图。
20.图2是本发明实施例提供的翻板机构在另一种视角下的结构示意图。
21.图3是本发明实施例提供的物料铺贴设备在翻板支架结构处于输送工作位置时的结构示意图。
22.图4是本发明实施例提供的物料铺贴设备在翻板支架结构处于抓取工作位置时的结构示意图。
23.其中,上述附图包括以下附图标记
24.物料铺贴设备1、翻板机构10、翻板支架11、翻板滑轮支架111、翻板上支架113、翻板下支架115、物料承载区117、进料端119、传感器12、驱动组件13、缸体132、活塞杆134、固定架14、进料辅助传感器15、输送组件16、输送电机162、传动滚轮轴164、滚轮166、阻挡组件
17、阻挡件172、阻挡件驱动电机174、机架20、定位夹紧机构30、抓取机构40、舵轮50
具体实施方式
25.为了便于理解本发明实施例,下面将参照相关附图对本发明实施例进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明实施例中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。
27.请参阅图1,本发明实施例提供一种翻板机构10,包括翻板支架11、传感器12和驱动组件13。翻板支架11用于对物料进行承载并翻转。传感器12安装于翻板支架11,用于感测物料是否离开翻板支架11。驱动组件13连接于翻板支架11,用于驱动翻板支架11转动。
28.翻板机构10还包括固定架14,固定架14可以作为底座,用于安装翻板机构10。固定架14还可以固定安装于其他设备。作为一种示例,翻板机构10可以通过固定架14安装于物料铺贴设备1(如图3),并依次实现对物料的涂覆、翻转及铺贴等多项操作。在本实施例中,物料为瓷砖。在其他实施方式中,物料还可以是木地板、大理石、玻璃等。
29.翻板支架11可转动地安装于固定架14,具体地,翻板支架11可以通过旋转铰链与固定架14固定连接。
30.翻板支架11包括翻板滑轮支架111、翻板上支架113和翻板下支架115,其中翻板上支架113和翻板下支架115相对,翻板滑轮支架111连接于翻板上支架113和翻板下支架115之间,翻板滑轮支架111、翻板上支架113和翻板下支架115相互连接,使翻板支架11大致呈长方形框体结构。翻板支架11可以由驱动组件13驱动而实现翻转动作。
31.在本实施例中,翻板支架11包括物料承载区117,并具有输送工作位置和抓取工作位置,其中物料承载区117大致对应于翻板滑轮支架111和翻板上支架113的位置,并且与翻板下支架115有一定距离,物料承载区117可以用于承载物料。在本实施例中,翻板支架11处于输送工作位置时,翻板上支架113和翻板下支架115同时处于水平位置,翻板支架11处于水平状态。此时物料也处于水平位置,避免由于物料的重力影响物料的运输。翻板支架11处于抓取工作位置时,翻板下支架115低于翻板上支架113,即翻板下支架115与地面的间距小于翻板上支架113与地面的间距,翻板支架11处于倾斜状态,此时也物料处于倾斜状态,利于对物料进行抓取。在其他实施方式中,处于输送工作位置的翻板支架11的翻板下支架115可以略低于翻板上支架113,处于抓取工作位置时的翻板支架11的翻板下支架115可以略高于翻板上支架113。
32.翻板支架11还包括进料端119,进料端119位于物料承载区117的一侧。在本实施例中,进料端119位于翻板下支架115。在其他实施方式中,进料端119还可以设置于翻板上支架113。进料端119可以用于进料,即物料可以从进料端119进入翻板支架11,并进一步位于物料承载区117。
33.传感器12位于物料承载区117,用于在抓取工作位置感测位于物料承载区117的物料,当传感器12感测不到物料承载区117的物料时产生物料移除感测信号,即传感器12感测
到物料从物料承载区117被取走时产生物料移除感测信号。也就是说,通过设置传感器12,可以感测物料是否已经被移除物料承载区117。在本实施例中,传感器12可以是激光传感器12,具体地,当物料离开物料承载区117时,物料不会反射激光传感器12出射的激光,因此入射至激光传感器12的激光的光量会发生变化,激光传感器12可以基于该变化产生物料移除感测信号。在其他实施方式中,传感器12还可以是红外传感器12等其他传感器12。
34.请参阅图1和图2,驱动组件13在物料从进料端119进入到物料承载区117时驱动翻板支架11从输送工作位置转动至抓取工作位置,使得物料在输送到位时即可进行物料的翻转,实现了物料输送与翻转的接续,提升了翻板机构10的物料翻转效率。驱动组件13基于物料移除感测信号驱动翻板支架11从抓取工作位置转动至输送工作位置,即驱动组件13在物料承载区117被取走时驱动翻板支架11从抓取工作位置转动至输送工作位置,实现了翻板支架11的及时复位(即回复至输送工作位置),提升了翻板支架11的翻转效率,进而提升了翻板机构10及物料铺贴设备1的自动化程度。在本实施例中,驱动组件13为推杆,推杆包括相连接的缸体132和活塞杆134,缸体132安装于固定架14,活塞杆134远离缸体132的一端铰接于翻板支架11,通过活塞杆134相对缸体132的伸出可以带动翻板支架11转动。其中,推杆可以是电推杆或者气动推杆。在其他实施方式中,驱动组件13还可以是液压杆。
35.请继续参阅图1和图2,在本实施例中,翻板机构10还包括进料辅助传感器15,进料辅助传感器15安装于进料端119,进料辅助传感器15用于在输送工作位置感测进料端119的物料。当进料辅助传感器15感测进料端119有物料时产生物料进入感测信号,表示物料已经开始进入进料端119。当进料辅助传感器15感测不到进料端119的物料时产生物料到达感测信号,表示物料的始端和末端均已经过进料端119,即物料已经到达物料承载区117时,进料辅助传感器15会产生物料到达感测信号。驱动组件13在进料辅助传感器15感测不到进料端119的物料时驱动翻板支架11从输送工作位置转动至抓取工作位置,具体地,驱动组件13可以基于物料达到感测信号驱动翻板支架11从输送工作位置转动至抓取工作位置,也就是说,物料从进料端119开始,至到达物料承载区117时,驱动组件13会带动翻板支架11翻板,使翻板支架11处于抓取工作位置,利于对物料进行抓取。在本实施例中,进料辅助传感器15也可以是激光传感器12。在其他实施方式中,进料辅助传感器15还可以是红外传感器12。
36.请继续参阅图1和图2,翻板机构10还包括输送组件16,输送组件16安装于翻板支架11,输送组件16在翻板支架11处于输送工作位置时进行物料输送。具体地,输送组件16基于物料进入感测信号进行输送,即输送组件16在进料辅助传感器15感测进料端119有物料时进行物料输送,以便将物料传输至物料承载区117。输送组件16基于物料到达感测信号停止输送,即物料达到物料承载区117后便停止物料的输送,节省能源。
37.输送组件16包括输送电机162、多个传动滚轮轴164和多个滚轮166,其中,滚轮166的数量与传动滚轮轴164的数量对应。传动滚轮轴164可转动地安装于翻板滑轮支架111的相对两端,并且位于翻板支架11内,传动滚轮轴164可以对物料进行传动并且承载。每个滚轮166固定安装于对应地传动滚轮轴164的末端,即安装于传动滚轮轴164远离翻板滑轮支架111的一侧,滚轮166可以与物料接触,因此,通过滚轮166的转动可以带动物料移动。在本实施例中,输送电机162可以与传动滚轮轴164传动连接,具体地,输送电机162可以通过同步带带动靠近翻板下支架115的传动滚轮轴164,其中,与输送电机162传动连接的传动滚轮轴164可以作为主动滚轮166轴,其他传动滚轮轴164可以作为从动滚轮166轴,以实现将物
料从进料端119运输至物料承载区117。
38.请继续参阅图1和图2,翻板机构10还包括阻挡组件17,阻挡组件17安装于进料端119,阻挡组件17具有阻挡状态和非阻挡状态。阻挡组件17可以基于物料达到感测信号呈阻挡状态,以阻挡物料移动至物料承载区117外。阻挡组件17还可以基于物料移除感测信号呈非阻挡状态,以避免对物料进入进料端119进行阻挡。在阻挡组件17呈阻挡状态后,驱动组件13驱动翻板支架11从输送工作位置转动至抓取工作位置,即阻挡组件17呈阻挡状态后,翻板支架11从水平状态翻转至倾斜状态,以便于阻挡组件17对翻转后的物料进行阻挡,避免物料移动至物料承载区117外部。
39.阻挡组件17包括阻挡件172和阻挡件驱动电机174,阻挡件172安装于进料端119并且与物料承载区117相邻,以便对物料进行阻挡,防止物料从输送工作位置转动至抓取工作位置的过程中掉落。阻挡件驱动电机174安装于翻板支架11,并与阻挡件172传动连接,以驱动阻挡件172在阻挡状态和非阻挡状态之间切换。在本实施例中,阻挡件172可以为旋转式阻挡件172,即阻挡件172可以基于物料达到感测信号通过旋转而呈阻挡状态,并凸出翻板支架11,以对物料进行阻挡,避免物料移动至物料承载区117外;或者基于物料移除感测信号通过旋转而呈非阻挡状态,并低于翻板支架11,以避免对物料进入进料端119进行阻挡。在其他实施方式中,阻挡件172还可以为伸缩式阻挡件172,即阻挡件172可以通过伸出而凸出翻板支架11,或者缩回而低于翻板支架11。
40.综上,本发明提供的翻板机构10,包括翻板支架11、传感器12和驱动组件13,其中,翻板支架11包括物料承载区117,并具有输送工作位置和抓取工作位置,传感器12安装于翻板支架11,并位于物料承载区117,当传感器12感测不到物料承载区117的物料时产生物料移除感测信号,驱动组件13连接于翻板支架11,并且基于物料移除感测信号驱动翻板支架11从抓取工作位置转动至输送工作位置,通过传感器12在感测不到物料承载区117的物料时产生物料移除感测信号,并且驱动组件13基于物料移除感测信号驱动翻板支架11从抓取工作位置转动至输送工作位置,实现了翻板支架11的及时复位(即回复至输送工作位置),提升了翻板支架11的翻转效率,进而提升了翻板机构10的自动化程度。
41.请参阅图3,本发明实施例还提供一种物料铺贴设备1,包括机架20、定位夹紧机构30、抓取机构40及翻板机构10,定位夹紧机构30、抓取机构40及翻板机构10均安装于机架20。
42.机架20可以是设备的主体部分,即机架20可以用于定位夹紧机构30、抓取机构40及翻板机构10等机构的安装。
43.请参阅图3和图4,定位夹紧机构30可以对物料进行定位夹紧,并且可以将物料输送至翻板支架11。在本实施例中,定位夹紧机构30包括上料端32和下料端34,上料端32与下料端34相对,其中,物料可以经过上料端32进入定位夹紧机构30,物料还可以经过下料端34离开定位夹紧机构30。
44.翻板机构10安装于机架20,具体地,翻板机构10可以通过固定架14安装于机架20,其中固定架14可以是固定安装于机架20。在本实施例中,翻板支架11设置于下料端34,以承接经定位夹紧机构30输送出的物料,便于定位夹紧与翻转的并形。这样设置还可以减小定位夹紧机构30与翻板机构10之间的间隙,即可以使物料铺贴设备1的整体结构更加紧凑,有效减小物料铺贴设备1的水平占用空间,利于物料铺贴设备1在狭小空间进行作业。
45.抓取机构40安装于机架20,并用于抓取处于抓取工作位置的翻板支架11上的物料。抓取机构40可以是机械手,具体可以是真空吸盘机械手,可以通过真空吸附物料的背面对物料转移至铺贴工位,以便后续对物料进行铺贴。在本实施例中,由于抓取机构40对处于抓取工作位置的物料进行抓取,也就是抓取机构40可以在机架20的外侧对物料进行抓取,因此可以避免抓取机构40在取料过程中与机架20干涉,提高物料铺贴设备1的可靠性。
46.在本实施例中,物料铺贴设备1还包括舵轮50,舵轮50可以安装于机架20的底部,并可以用于驱动机架20移动,例如直行或者转向,避免物料铺贴设备1在工作时与其他机构发生碰撞而造成损坏,或者影响物料铺贴设备1的作业效率。在本实施例中,舵轮50的数量可以是四个。在其他实施方式中,舵轮50的具体数量可以根据需要进行设定。
47.在其他实施方式中,物料铺贴设备1还可以包括涂覆机构和刮料机构,涂覆机构和刮料机构都可以安装于机架20,其中,涂覆机构可以在物料处于定位夹紧机构30时对物料进行涂覆混凝土或者胶水等粘结剂,刮料机构可以在物料处于定位夹紧机构30时对物料进行刮涂,避免粘接剂过量,涂覆机构和刮料机构的具体结构可以参照其他文件。
48.综上,本发明提供的物料铺贴设备1,包括机架20、定位夹紧机构30、抓取机构40及翻板机构10,翻板机构10包括翻板支架11、传感器12和驱动组件13,通过传感器12在感测不到物料承载区117的物料时产生物料移除感测信号,并且驱动组件13基于物料移除感测信号驱动翻板支架11从抓取工作位置转动至输送工作位置,实现了翻板支架11的及时复位(即回复至输送工作位置),提升了翻板支架11的翻转效率,进而提升了翻板机构10及物料铺贴设备1的自动化程度。
49.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
