1.本发明属于钢丝绳无损检测技术领域,更为具体地讲,涉及一种通过漏磁信号非接触式获取运动钢丝绳瞬时速度及位移的方法。
背景技术:
2.钢丝绳多应用在大型设备起吊或牵引场所,因此钢丝绳失效会带来巨大安全隐患和财产损失。在使用过程中,由于钢丝绳结构的复杂性及应用环境的多样性,钢丝绳会产生不同形式的损伤,导致其无损检测面临诸多困难。根据钢丝绳损伤的性质和特点,可将其分为局部缺陷(local fault,简称lf)及横截面损耗(loss of metallic area,简称lma)两类。其中,lf类主要包含钢丝绳断丝、点蚀、局部形状异变等,lma类主要包含磨损、锈蚀、钢丝绳绳径缩小等损伤。
3.近年来针对钢丝绳的无损检测,不同检测技术逐渐完善。根据不同检测原理,目前应用较为广泛的检测方法有图像法、声发射法及电磁检测法等。由于钢丝绳材料导磁性能好、电磁信号穿透性高,基于漏磁信号的电磁检测方法取得了良好的检测效果。我国也针对铁磁性钢丝绳电磁无损检测制定了相关标准,标志此类检测方法逐步规范并广泛应用于实际工业中。
4.在钢丝绳无损检测过程中,传感器内部往往嵌入不同类型的速度编码器进行等距采样,用于估计钢丝绳运动速度及缺陷定位。以旋转式增量编码器为例,依据钢丝绳通过滑轮时滑轮的转动圈数,可以获取钢丝绳的运动速度从而实现缺陷定位。但由于滑轮与钢丝绳之间接触运行,易产生滑轮空转或卡死的情况。同时,当钢丝绳长期高速运行或循环往复运动下,滑轮表面容易造成磨损,从而导致定位精度,影响缺陷定位判断。因此,寻找一种非接触式的速度和位移测量方法对于钢丝绳无损检测具有重要的工程意义。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法,利用改进的霍夫定律求取股波倾斜角度,能够推算出钢丝绳的实时速率及运行方向,从而代替钢丝绳无损检测系统中的速度检测设备,优化检测结构。
6.为实现上述发明目的,本发明一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法,其特征在于,包括以下步骤:
7.(1)、采集钢丝绳漏磁信号;
8.利用x路霍尔传感器对饱和磁化的运动钢丝绳的漏磁信号进行检测,等时间采样后得到x路漏磁信号s(x),x=1,2,
…
,x;
9.(2)、漏磁信号预处理;
10.(2.1)、利用样条插值法对x路漏磁信号s(x)进行插值处理,形成y路漏磁信号s(y),y=1,2,
…
,y;
11.(2.2)、对每一路漏磁信号s(y)进行降噪处理,形成股波波纹明显的图像信号
12.(3)、标记每一张图像信号的股波区域;
13.(3.1)、将信号图像转换为灰度图,记为
14.(3.2)、判定包含股波的区域;
15.设定灰度值极差阈值k;在每一张灰度图中,若每列中存在任意两像素点的灰度差值大于k,则判定该列为股波区域;
16.(4)、对灰度图中的股波区域进行边缘检测;
17.(4.1)、在灰度图中,利用窗口大小为m、步长为1的滑动窗口对股波区域进滑动,截取多个窗口区域sy(n),其中,每个窗口区域包含m个像素点,n=1,2,
…
,n表示窗口区域的编号;
18.(4.2)、对每一个窗口区域sy(n)先进行图像均衡处理,再利用canny算法提取边缘点,得到边缘检测图
19.(5)、利用改进后的霍夫变换求解股波倾斜角α;
20.(5.1)、在每一张边缘检测图中,通过8邻域判断条件找出所有的连通线,并标记为其中,x=1,2,
…
,x为连通线编号;
21.(5.2)、为每一条连通线构建与滑动窗口大小一致的空白图像再将连通线对应映射至中,在图像中对连通线进行霍夫变换,得到极值以连通线上各像素点的坐标值,然后根据坐标值在边缘检测图中以线段显示;
22.(5.3)、遍历边缘检测图中所有显示线段,取这些线段中对应极值最大的q个线段作为该处股波的有效线;
23.(5.4)、在直角坐标系计算出所有有效线的角度值,然后以所有角度值的中值作为窗口区域的股波倾斜角α;
24.(6)、利用斜率与钢丝绳捻距的关系求解钢丝绳的速度变化及移动距离;
25.将每个窗口区域作为一个采样时刻,通过钢丝绳物理形态及传感器采样的数学关系,计算出钢丝绳的运行速度v;
[0026][0027]
其中,l为钢丝绳捻距长度、y为样条插值后信号的行数、α为股波倾斜角度、f为传感器采样频率;
[0028]
对于速度v进行积分,求解钢丝绳运行距离s=∫vdt。
[0029]
本发明的发明目的是这样实现的:
[0030]
本发明为一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法,先采集钢丝绳漏磁信号,经过去趋势处理后,通过插值法和滤波处理后形成股波波纹明显的二维信号图像;接着,标记每一张图像的股波区域并进行滑窗处理,然后对每一个窗口区域进行图像
均衡处理以及基于canny算法的边缘检测;然后使用改进后的霍夫变换方法求取图像中股波斜率,判断钢丝绳运行方向;最后通过斜率确定钢丝绳的实时速度及移动距离。
[0031]
同时,本发明提供的一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法还具有以下有益效果:
[0032]
(1)、本发明将多路漏磁信号进行插值为二维图像信号,分析股波图像二维纹理特征,充分利用钢丝绳漏磁信号信息;
[0033]
(2)、本发明通过漏磁信号进行钢丝绳运行速度及位移判断,避免速度编码器空转、抖动等影响,简化检测装置,节省安装成本;
[0034]
(3)、传统的霍夫变换算法没有引入连通性判断,所得到的连通线为每条股波的轮廓连接线,那么在后续处理中直接利用霍夫变换可能导致的不同股波边缘点串联,而改进后的霍夫变换算法,引入连通性判断,能够识别单根股波倾斜角度,通过钢丝绳与传感器的物理结构及数学关系,可实现钢丝绳速度的实时检测。
附图说明
[0035]
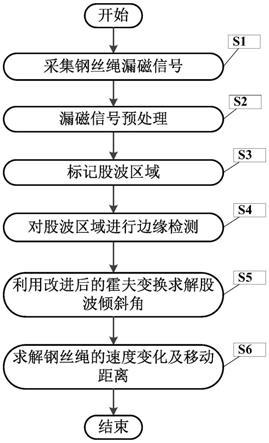
图1是一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法流程图;
[0036]
图2是本发明漏磁传感器检测示意图;
[0037]
图3是霍尔传感器与钢丝绳的相对位置示意图;
[0038]
图4是样条插值后的二维信号图像;
[0039]
图5是使用改进后的霍夫变换处理示意图;
[0040]
图6是漏磁信号股波判断示意图;
[0041]
图7是股波倾斜角变化示意图;
[0042]
图8是钢丝绳速度变化示意图。
具体实施方式
[0043]
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
[0044]
实施例
[0045]
图1是一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法流程图。
[0046]
在本实施例中,如图1所示,本发明一种基于漏磁图像纹理获取运动钢丝绳速度和位移的方法,包括以下步骤:
[0047]
s1、采集钢丝绳漏磁信号;
[0048]
传感器装置及检测原理示意图如图2所示,本实施例中利用永磁体及衔铁对钢丝绳进行磁化,如图3所示,霍尔传感器均布在钢丝绳外圈周向位置,每个霍尔传感器间相隔22.5
°
。在本实施例中,漏磁传感器采样频率为256hz,传感器通过整段钢丝绳后停止运动。在本实施例中,利用16路霍尔传感器对饱和磁化的钢丝绳的漏磁信号进行检测,等时间采样后得到16路漏磁信号s(x),x=1,2,
…
,16;
[0049]
s2、漏磁信号预处理;
[0050]
s2.1、利用样条插值法对x路漏磁信号s(x)进行插值处理,形成200路漏磁信号s
(y),y=1,2,
…
,200;在本实施例中,样条插值处理后,数据量增大,漏磁信号可读取为二维图像信号;
[0051]
s2.2、对漏磁图像信号s(y)进行降噪处理,形成股波波纹明显的图像信号在本实施例中,对二维图像信号采用包含但不限于二维小波变换的滤波方法消除抖动及其他噪声干扰,如图4所示,股波区域代表钢丝绳与传感器间有相对运动,无股波区域则代表钢丝绳处于相对静止。
[0052]
s3、标记每一张图像信号的股波区域;
[0053]
s3.1、将信号图像转换为灰度图,记为
[0054]
s3.2、判定包含股波的区域;
[0055]
设定灰度值极差阈值k;在每一张灰度图中,若每列中存在任意两像素点的灰度差值大于k,则判定该列为股波区域;
[0056]
s4、对灰度图中的股波区域进行边缘检测;
[0057]
s4.1、在灰度图中,利用窗口大小为m、步长为1的滑动窗口对股波区域进滑动,截取多个窗口区域sy(n),其中,每个窗口区域包含m=50个像素点,n=1,2,
…
,n表示窗口区域的编号;
[0058]
s4.2、对每一个窗口区域sy(n)先进行图像均衡处理,再利用canny算法提取边缘点,得到边缘检测图
[0059]
s5、利用改进后的霍夫变换求解股波倾斜角α;
[0060]
s5.1、在每一张边缘检测图中,通过8邻域判断条件找出所有的连通线,并标记为其中,x=1,2,
…
,x为连通线编号;
[0061]
在本实施例中,通过8邻域判断条件找出连通线为现有技术,具体处理方式不再赘述;所得到的连通线为每条股波的轮廓连接线,避免了后续处理中直接利用霍夫变换可能导致的不同股波边缘点串联,明确了单个窗口内存在的多条股波轮廓,从而利用联通线作为窗口内部股波进行后续倾斜角度求解;
[0062]
s5.2、为每一条连通线构建与滑动窗口大小一致的空白图像再将连通线对应映射至中,在图像中对连通线进行霍夫变换,得到极值以连通线上各像素点的坐标值,然后根据坐标值在边缘检测图中以线段显示;
[0063]
s5.3、遍历边缘检测图中所有显示线段,取这些线段中对应极值最大的q=3个线段作为该处股波的有效线;
[0064]
在本实施例中,如图5所示,左图为窗口区域sy(n)内得到的股波边缘点,可见窗口内存在多条股波,且每条股波边缘点间并不在一条直线上。为区别每条股波,并对每条股波所对应的线段进行检测,引入连通性判断,采用改进后的霍夫变换,避免不同股波边缘点相连接造成误判。右图为窗口区域sy(n)内极值最大的3条线段。整段信号处理后,股波区域内部股波判断结果如图6所示,图6下图显示了判定的股波区域及窗口所在位置,图6上图显示
了所有窗口内部的极值最大的有效线段,通过对有效线段进行处理,可得到股波对应的坐标及斜率。
[0065]
s5.4、在直角坐标系计算出所有有效线的角度值,然后以所有角度值的中值作为窗口区域的股波倾斜角α;
[0066]
在本实施例中,提供引入连通性判断从而避免不同股波边缘点间连接干扰股波倾斜角度判定,当计算出所有有效线的角度值后,得到如图7所示的倾斜角度变化示意图。
[0067]
s6、利用斜率与钢丝绳捻距的关系求解钢丝绳的速度变化及移动距离;
[0068]
将每个窗口区域作为一个采样时刻,通过钢丝绳物理形态及传感器采样的数学关系,计算出钢丝绳的运行速度v;
[0069][0070]
其中,l为钢丝绳捻距长度、y为样条插值后信号的行数、α为股波倾斜角度、f为传感器采样频率;
[0071]
在本实施例中,通过数量关系计算钢丝绳的速度变化趋势,如图8所示,对速度v进行积分便可求解钢丝绳移动距离s=∫vdt。
[0072]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
