1.本发明涉及金属加工装置领域,更具体的说是一种半自动电弧焊接机。
背景技术:
2.在进行金属原料焊接加工的时候,需要利用半自动电弧焊接机对多种原料进行焊接或对金属原料自身进行焊接。
3.现有的半自动电弧焊接机焊接过程中,需要工作人员一手握持焊接装置,另一只手握持焊接所需要的焊丝,将焊丝与原料的指定位置接触后,利用焊接装置对的焊丝与原料进行融化连接,该加工方式,在加工的过程中可能会引起焊接装置对使用者握持焊丝的手臂造成伤害,有着一定的安全隐患。
技术实现要素:
4.本发明的目的是提供一种半自动电弧焊接机,可以移动运输不同规格的焊丝。
5.本发明的目的通过以下技术方案来实现:
6.一种半自动电弧焊接机,包括支撑底座,支撑底座上固接有支撑板,支撑底座的两端分别固接有电推杆,两个电推杆的另一端分别固接有滑道,滑道内滑动连接有移动滑块,移动滑块上阻尼转动连接有转向控制柱,转向控制柱上阻尼转动连接有连接杆a,连接杆a上阻尼转动连接有连接杆b,连接杆b上滑动连接有夹持移动滑块,夹持移动滑块上转动连接有主动轮,夹持移动滑块上设置有第一电机,通过第一电机实现主动轮旋转,夹持移动滑块上转动连接有从动轮。
7.所述连接杆b上转动连接有控制丝杠,控制丝杠上螺纹连接有夹持移动滑块。
8.所述连接杆a上固接有固定挡板,固定挡板上固接有顶部挡板,连接杆a上滑动连接有滑动挡板,固定挡板上固接有第一拉簧,第一拉簧的另一端固接在滑动挡板。
附图说明
9.下面结合附图和具体实施方法对本发明做进一步详细的说明。
10.图1是本装置的总体示意图;
11.图2是支撑底座与支撑板的配合示意图;
12.图3是支撑板与定位环的配合示意图;
13.图4是定位环与定位螺栓的配合示意图;
14.图5是支撑底座与支撑移动块的配合示意图;
15.图6是支撑底座与定位滑道的配合示意图;
16.图7是移动支撑滑块与转向支撑杆的配合示意图;
17.图8是支撑底座与滑道的配合示意图;
18.图9是滑道与转向控制柱的配合示意图;
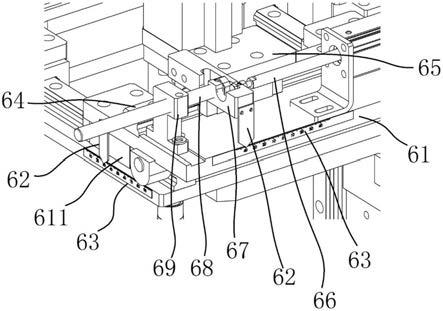
19.图10是连接杆b与控制丝杠的配合示意图。
具体实施方式
20.参看图1、2、8、9、10,示出了按照本发明中利用加焊接所需要使用的焊丝放置在连接杆b58上利用旋转的主动轮512将焊丝进行供料的示意图,进一步地,
21.一种半自动电弧焊接机包括支撑底座1、支撑板12、滑道5、电推杆51、移动滑块52、转向控制柱53、连接杆a54、连接杆b58、夹持移动滑块511、主动轮512和从动轮513,支撑板12固接在支撑底座1上,电推杆51设置有两个,两个电推杆51分别固接在支撑底座1的两端上,滑道5的两端分别固接在两个电推杆51上,移动滑块52滑动连接在滑道5内,转向控制柱53阻尼转动连接在移动滑块52上,连接杆a54阻尼转动连接在转向控制柱53上,连接杆b58阻尼转动连接在连接杆a54上,夹持移动滑块511滑动连接在连接杆b58上,主动轮512转动连接在夹持移动滑块511上,夹持移动滑块511上设置有第一电机,通过第一电机实现主动轮512旋转,从动轮513转动连接在夹持移动滑块511上,主动轮512与从动轮513通过皮带传动连接。
22.使用本装置的时候,将需要焊接的原料放置在支撑板12上,在原料焊接的过程中需要利用焊丝来将多种原料之间进行连接,将焊丝的一端放置在连接杆b58上,移动连接杆b58上连接的夹持移动滑块511,从而带动夹持移动滑块511上连接的主动轮512与从动轮513下降,使主动轮512与从动轮513的底端分别与焊丝接触,驱动主动轮512旋转,来带动焊丝在连接杆b58上移动,从而确保装置能够持续运输焊丝,确保装置能够持续移动。同时为了确保装置能够对原料的不同位置进行焊接加工,推动移动滑块52在滑道5内移动,从而带动移动滑块52上连接的连接杆b58水平移动,移动滑块52移动到指定位置后,推动移动滑块52上连接的转向控制柱53来改变连接的连接杆b58朝向,转动转向控制柱53上连接的连接杆a54来改变连接杆b58的高度,通过改变两个电推杆51的长度来改变支撑底座1与滑道5之间的距离,从而改变连接杆b58的位置,确保连接杆b58上放置的焊丝能够移动到指定位置,使焊丝能够对原料的指定位置接触,确保装置对原料的指定位置进行焊接,在利用连接杆b58上设置的电机驱动主动轮512旋转,从而利用主动轮512来实现焊丝在连接杆b58上移动的需求。
23.参看图1、2、8、9、10,示出了按照本发明中利用控制丝杠510来控制夹持移动滑块511的高度,确保主动轮512与从动轮513能够将不同型号的焊丝夹持在连接杆b58上进行运输的示意图,进一步地,
24.一种半自动电弧焊接机包括控制丝杠510,控制丝杠510转动连接在连接杆b58上并且螺纹连接有夹持移动滑块511。
25.使用本装置的时候,根据需要焊接的原料的不同,需要利用不同规格种类的焊丝来连接多种原料,为了确保装置能够适配不同种类规格的焊丝,将需要使用的焊丝放置在连接杆b58上,转动连接杆b58上连接的控制丝杠510,使控制丝杠510能够驱动夹持移动滑块511在连接杆b58上升降,并且对夹持移动滑块511的高度进行固定,使夹持移动滑块511上连接的主动轮512与从动轮513能够与连接杆b58对焊丝进行夹持,使焊丝能够稳定的在连接杆b58上移动。
26.参看图1、2、8、9、10,示出了按照本发明中利用固定挡板55、顶部挡板56与滑动挡板57对焊丝进行限制,避免连接杆b58移动的过程中焊丝飘荡的示意图,进一步地,
27.一种半自动电弧焊接机包括固定挡板55、顶部挡板56和滑动挡板57,固定挡板55
固接在连接杆a54上,顶部挡板56固接在固定挡板55上,滑动挡板57滑动连接在连接杆a54上,固定挡板55上固接有第一拉簧,第一拉簧的另一端固接在滑动挡板57。
28.使用本装置的时候,将焊丝的一端插入固定挡板55与滑动挡板57之间,利用固定挡板55与滑动挡板57分别与焊丝的两端接触,使固定挡板55与滑动挡板57能够对不同规格的焊丝进行夹持,根据焊丝的规格种类不同会推动滑动挡板57移动,利用滑动挡板57上连接的第一拉簧来反向拉动滑动挡板57,使能够与焊丝的一端贴合,避免焊丝在连接杆a54的上方飘荡,对工作人员造成安全隐患,同时在固定挡板55的顶端连接顶部挡板56,利用顶部挡板56对焊丝进行限制,避免焊丝在连接杆a54旋转移动的过程中远离连接杆a54,使旋转的主动轮512无法平滑的推动焊丝。
29.参看图1、2、8、9、10,示出了按照本发明中利用移动握把59来控制连接杆b58移动的示意图,进一步地,
30.一种半自动电弧焊接机包括移动握把59,移动握把59固接在连接杆b58上。
31.使用本装置的时候,工作人员通过握持移动握把59来控制连接杆b58移动,工作人员通过推动移动握把59来控制连接杆b58连接的转向控制柱53与连接杆a54旋转至指定角度,从而控制连接杆b58能够移动到指定位置。
32.参看图1、3、4,示出了按照本发明中利用滑动夹板22将不同种类的原料进行固定的示意图,进一步地,
33.一种半自动电弧焊接机包括定位环2、定位夹板21和滑动夹板22,定位环2转动连接在支撑板12上,定位夹板21固接在定位环2上,滑动夹板22滑动连接在定位环2上,定位环2上固接有第二拉簧,第二拉簧的另一端固接在滑动夹板22。
34.使用本装置的时候,将需要焊接的原料放置在支撑板12上,根据需要原料之间需要焊接的位置不同,推动定位环2在支撑板12上旋转,若将两个原料之间进行连接,使两个原料分别与定位夹板21与滑动夹板22接触,利用定位夹板21与滑动夹板22将两个原料之间进行夹持,从而两个原料之间能够贴合,通过移动连接杆b58来带动连接杆b58上放置的焊丝进行移动,使焊丝能够移动到两个原料之间,便于装置对两个原料进行焊接,若需要对原料自身的断裂处进行焊接,转动定位环2,使定位环2上连接的滑动夹板22移动到支撑板12的顶端并且确保滑动夹板22的底端与原料贴合,从而利用滑动夹板22对原料进行夹持,避免在利用装置对原料进行焊接的过程中,原料移动导致装置的加工出现误差,利用滑动夹板22上连接的第二拉簧对滑动夹板22进行反向拉伸,使滑动夹板22受到原料影响移动的过程中,利用第二压簧对滑动夹板22进行反向移动,确保滑动夹板22能够与原料的一端贴合。
35.参看图1、3、4,示出了按照本发明中利用定位螺栓24对定位环2进行固定的示意图,进一步地,
36.一种半自动电弧焊接机包括定位孔13、限位孔23和定位螺栓24,定位孔13设置在支撑板12上,限位孔23设置有多个,多个限位孔23均匀设置在定位环2上,定位螺栓24的尾端穿过对应的限位孔23插接在定位孔13内。
37.使用本装置的时候,工作人员根据加工需求的不同推动定位环2旋转,定位环2旋转到指定位置后,利用定位螺栓24插入对应的限位孔23内,并确保定位螺栓24的尾端插入定位孔13内,从而利用定位螺栓24对定位环2进行固定,避免装置运转的过程中定位环2受到外力影响旋转,从而导致装置加工失败。
38.参看图1、5、6,示出了按照本发明中利用电弧焊接抢34对原料进行焊接加工的示意图,进一步地,
39.一种半自动电弧焊接机包括水平滑槽a11、支撑移动块3、竖直滑槽31、控制滑块32、限位套筒33和电弧焊接抢34,水平滑槽a11设置在支撑底座1上,支撑移动块3滑动连接在水平滑槽a11内,竖直滑槽31设置在支撑移动块3上,控制滑块32滑动连接在竖直滑槽31内,限位套筒33固接在控制滑块32上,电弧焊接抢34阻尼滑动连接在限位套筒33上。
40.使用本装置的时候,工作人员通过滑动夹板22将原料进行固定后,利用移动握把59来带动连接的连接杆b58移动到指定位置,使连接杆b58上设置的焊丝能够移动到指定位置与原料接触,推动支撑移动块3在水平滑槽a11内移动从而控制电弧焊接抢34的水平位置,推动控制滑块32在竖直滑槽31内移动,控制电弧焊接抢34的竖直位置,使电弧焊接抢34能够移动到指定位置,工作人员要对原料进行焊接的时候,推动电弧焊接抢34下降从而改变限位套筒33与电弧焊接抢34之间的距离,使电弧焊接抢34的底端与原料接触,利用电弧焊接抢34对原料与焊丝进行焊接,从而完成原料的加工需求。
41.参看图1、5、6,示出了按照本发明中利用控制握把35控制电弧焊接抢34移动的示意图,进一步地,
42.一种半自动电弧焊接机包括控制握把35,控制握把35固接在电弧焊接抢34上。
43.使用本装置的时候,工作人员根据原料的加工需求来移动电弧焊接抢34到指定位置,对原料的指定位置进行焊接加工,为了方便工作人员控制电弧焊接抢34移动,在电弧焊接抢34上设置控制握把35,工作人员握持控制握把35来推动电弧焊接抢34进行移动,使电弧焊接抢34能够移动到指定位置,提高工作人员的加工效率。
44.参看图1、6、7,示出了按照本发明中利用面部防护板44对工作人员的面部进行防护的示意图,进一步地,
45.一种半自动电弧焊接机包括定位滑道4、移动支撑滑块41、转向支撑杆42、高度控制杆43和面部防护板44,定位滑道4固接在支撑底座1上,移动支撑滑块41滑动连接在定位滑道4内,转向支撑杆42阻尼转动连接在移动支撑滑块41上,高度控制杆43阻尼滑动连接在转向支撑杆42上,面部防护板44阻尼转动连接在高度控制杆43上。
46.使用本装置的时候,为了确保工作人员进行焊接的时候,不会被飞溅的铁屑等杂物造成损伤,需要利用面部防护板44对工作人员的面部进行防护,并且利用面部防护板44上设置的观察窗口对工作人员的眼部进行防护的同时便于工作人员对加工情况进行观察,在工作人员对原料进行焊接加工的时候,推动移动支撑滑块41移动来改变面部防护板44的水平位置,通过转动转向支撑杆42与推动高度控制杆43来改变面部防护板44的位置,使面部防护板44能够移动到工作人员的面部前方,从而对工作人员的面部进行防护,并通过推动面部防护板44使面部防护板44与工作人员的面部贴合,提高面部防护板44的防护效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。