1.本实用新型涉及热熔焊接技术领域,具体涉及一种伺服热熔机器人焊接机。
背景技术:
2.热熔焊接是指非金属与非金属之间,是经过加热升温至(液态)熔点后的一种连接方式。广泛应用于pp-r管、pb管、pe-rt管、金属复合管、曲弹矢量铝合金衬塑复合管道系统等新型管材与管件连接。热熔连接的原理是将两根pe管道用夹具夹紧后,将其配合面紧贴在加热工具上来加热其平整的端面直至熔融,移走加热工具后,将两个熔融的端面紧靠在一起,在压力的作用下保持到接头冷却,使之成为一个整体。
3.现有的热熔焊接还时依靠手工操作,手工操作缺少精度,时常发生两个熔融的端面错位或用力施压时用力不均导致倾斜等问题。
技术实现要素:
4.为解决上述技术问题,本实用新型之目的在于提供一种伺服热熔机器人焊接机,实现了自动化高精度的合拢两个需要热熔焊接的工件,紧接着对其保持一定的压力直到接头冷却成型,从而避免因人工操作而出现的各种质量问题。
5.为实现上述目的,本实用新型之一种伺服热熔机器人焊接机,包括固定平台、底座和电控系统,所述固定平台上设有两个伸缩装置,两个所述伸缩装置的输出端均向下穿过所述固定平台,其中一所述伸缩装置的输出端设有柔性压头,所述柔性压头具有弹性,另一所述伸缩装置的输出端设有动夹具;
6.所述底座表面设有滑轨,与所述滑轨配合滑动连接有静夹具,所述底座表面设有气缸,所述气缸与所述滑轨呈平行分布,所述气缸输出端与所述静夹具连接;
7.所述固定平台位于所述底座上方,所述底座与所述固定平台之间设有立柱,所述柔性压头与所述动夹具均位于所述静夹具在所述滑轨上滑动路径的上方,所述电控系统用以控制所述伸缩装置与所述气缸进行伸缩作业以及所述动夹具、所述静夹具的开合。
8.进一步,所述伸缩装置为伺服电机。
9.进一步,所述柔性压头、所述动夹具均设有导向杆,所述导向杆穿过所述固定平台并与所述固定平台滑动连接。
10.进一步,所述柔性压头、所述动夹具与所述固定平台之间设有弹簧。
11.进一步,所述电控系统集成在一个控制箱中并固定安装在所述固定平台和所述底座的侧面。
12.本实用新型与现有技术相比,其有益效果是:
13.电控系统控制气缸推拉动静夹具到动夹具正下方,将两个需要热熔焊接的工件分别固定在静夹具和动夹具中,再使用其他加热装置对着两个工件的表面进行加热,加热完毕后,电控系统控制伸缩装置推动动夹具向下与静夹具合拢,让两个工件贴合在一起,然后松开动夹具同时气缸推拉静夹具至柔性压头下方,电控系统控制另一伸缩装置推动柔性压
头向下挤压贴合在一起的工件,柔性压头具有弹性,让柔性压头在挤压工件时不会对工件造成损坏,待工件冷却彻底焊接在一起后升起柔性压头,即可完成两个工件的热熔焊接。
14.综上采用此种伺服热熔机器人焊接机,实现了自动化高精度的合拢两个需要热熔焊接的工件,紧接着对其保持一定的压力直到接头冷却成型,从而避免因人工操作而出现的各种质量问题。
附图说明
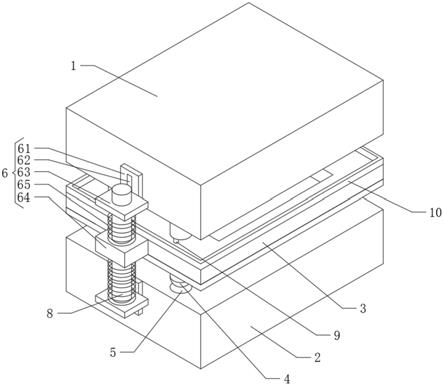
15.图1是本实用新型一种伺服热熔机器人焊接机的立体图;
16.图2是本实用新型一种伺服热熔机器人焊接机的部分侧视图;
17.图3是本实用新型一种伺服热熔机器人焊接机的部分俯视图;
18.图中:1、固定平台;2、底座;3、电控系统;4、伸缩装置;5、柔性压头;6、动夹具;7、滑轨;8、静夹具;9、气缸;10、立柱;11、导向杆;12、弹簧。
具体实施方式
19.为详细说明本实用新型之技术内容、构造特征、所达成目的及功效,以下兹例举实施例并配合附图详予说明。
20.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
21.请参阅图1所示,并参阅图2、图3,本实用新型提供一种实施方案:
22.本实用新型提供为实现上述目的,本实用新型之一种伺服热熔机器人焊接机,包括固定平台1、底座2和电控系统3,所述固定平台1上设有两个伸缩装置4,两个所述伸缩装置4的输出端均向下穿过所述固定平台1,其中一所述伸缩装置4的输出端设有柔性压头5,所述柔性压头5具有弹性,另一所述伸缩装置4的输出端设有动夹具6;
23.所述底座2表面设有滑轨7,与所述滑轨7配合滑动连接有静夹具8,所述底座2表面设有气缸9,所述气缸9与所述滑轨7呈平行分布,所述气缸9输出端与所述静夹具8连接;
24.所述固定平台1位于所述底座2上方,所述底座2与所述固定平台1之间设有立柱10,所述柔性压头5与所述动夹具6均位于所述静夹具8在所述滑轨7上滑动路径的上方,所述电控系统3用以控制所述伸缩装置4与所述气缸9进行伸缩作业以及所述动夹具6、所述静夹具8的开合。
25.电控系统3控制气缸9推拉动静夹具8到动夹具6正下方,将两个需要热熔焊接的工件(图中未标出)分别固定在静夹具8和动夹具6中,再使用其他加热装置(图中未标出)对着两个工件的表面进行加热,加热完毕后,电控系统3控制伸缩装置4推动动夹具6向下与静夹具8合拢,让两个工件贴合在一起,然后松开动夹具6同时气缸9推拉静夹具8至柔性压头5下方,电控系统3控制另一伸缩装置4推动柔性压头5向下挤压贴合在一起的工件,柔性压头5具有弹性,让柔性压头5在挤压工件时不会对工件造成损坏,待工件冷却彻底焊接在一起后升起柔性压头5,即可完成两个工件的热熔焊接。
26.综上采用此种伺服热熔机器人焊接机,实现了自动化高精度的合拢两个需要热熔焊接的工件,紧接着对其保持一定的压力直到接头冷却成型,从而避免因人工操作而出现的各种质量问题。
27.进一步,所述伸缩装置4为伺服电机。
28.伺服电机具有精度高、运行稳定和便于控制等优点,采用伺服电机提高了热熔焊接的产品质量。
29.进一步,所述柔性压头5、所述动夹具6均设有导向杆11,所述导向杆11穿过所述固定平台1并与所述固定平台1滑动连接。
30.防止伸缩装置4在推拉柔性压头5或动夹具6时发生偏斜,影响产品质量。
31.进一步,所述柔性压头5、所述动夹具6与所述固定平台1之间设有弹簧12。
32.弹簧12在柔性压头5、动夹具6与固定平台1之间起缓冲作用,避免互相撞击导致损坏。
33.进一步,所述电控系统3集成在一个控制箱中并固定安装在所述固定平台1和所述底座2的侧面。
34.此种设计让整个装置更加集成化,同时也便于操作。
技术特征:
1.一种伺服热熔机器人焊接机,其特征在于:包括固定平台(1)、底座(2)和电控系统(3),所述固定平台(1)上设有两个伸缩装置(4),两个所述伸缩装置(4)的输出端均向下穿过所述固定平台(1),其中一所述伸缩装置(4)的输出端设有柔性压头(5),所述柔性压头(5)具有弹性,另一所述伸缩装置(4)的输出端设有动夹具(6);所述底座(2)表面设有滑轨(7),与所述滑轨(7)配合滑动连接有静夹具(8),所述底座(2)表面设有气缸(9),所述气缸(9)与所述滑轨(7)呈平行分布,所述气缸(9)输出端与所述静夹具(8)连接;所述固定平台(1)位于所述底座(2)上方,所述底座(2)与所述固定平台(1)之间设有立柱(10),所述柔性压头(5)与所述动夹具(6)均位于所述静夹具(8)在所述滑轨(7)上滑动路径的上方,所述电控系统(3)用以控制所述伸缩装置(4)与所述气缸(9)进行伸缩作业以及所述动夹具(6)、所述静夹具(8)的开合。2.根据权利要求1所述的一种伺服热熔机器人焊接机,其特征在于:所述伸缩装置(4)为伺服电机。3.根据权利要求1所述的一种伺服热熔机器人焊接机,其特征在于:所述柔性压头(5)、所述动夹具(6)均设有导向杆(11),所述导向杆(11)穿过所述固定平台(1)并与所述固定平台(1)滑动连接。4.根据权利要求1所述的一种伺服热熔机器人焊接机,其特征在于:所述柔性压头(5)、所述动夹具(6)与所述固定平台(1)之间设有弹簧(12)。5.根据权利要求1所述的一种伺服热熔机器人焊接机,其特征在于:所述电控系统(3)集成在一个控制箱中并固定安装在所述固定平台(1)和所述底座(2)的侧面。
技术总结
本实用新型涉及一种伺服热熔机器人焊接机,包括固定平台、底座和电控系统,固定平台上设有两个伸缩装置,两个伸缩装置的输出端均向下穿过固定平台,其中一伸缩装置的输出端设有柔性压头,柔性压头具有弹性,另一伸缩装置的输出端设有动夹具,底座表面设有滑轨,滑轨配合滑动连接有静夹具,底座表面设有气缸,气缸与滑轨呈平行分布,气缸输出端与静夹具连接,固定平台位于底座上方,底座与固定平台之间设有立柱,柔性压头与动夹具均位于静夹具在滑轨上滑动路径的上方,采用此种伺服热熔机器人焊接机,实现了自动化高精度的合拢两个需要热熔焊接的工件,紧接着对其保持一定的压力直到接头冷却成型,从而避免因人工操作而出现的各种质量问题。质量问题。质量问题。
技术研发人员:杨菊花
受保护的技术使用者:湖北森玛特智能装备有限公司
技术研发日:2021.12.20
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。