1.本发明涉及晶振加工技术领域,具体地说,涉及一种带有限位机构的石英晶体谐振器引脚定位工艺。
背景技术:
2.石英晶体谐振器简称石英晶体或晶振,是利用石英晶体的压电效应,用来产生高精度振荡频率的一种电子元件,属于被动元件,该元件主要由石英晶片、基座、外壳、银胶、银等成分组成,根据引线状况可分为直插与表面贴装两种类型。
3.石英晶体谐振器通过引脚与电路相连接,引脚的位置是否正确决定了石英晶体谐振器的品质,现有的石英晶体谐振器插件方式是通过目视将引脚接入石英晶体谐振器插件孔内,由于引脚与孔位误差较大,导致引脚插件质量不理想,因此需要一种带有限位机构的石英晶体谐振器引脚定位工艺。
技术实现要素:
4.本发明的目的在于提供一种带有限位机构的石英晶体谐振器引脚定位工艺,以解决上述背景技术中提出的问题。
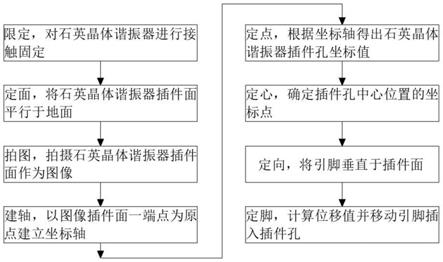
5.为实现上述目的,本发明目的在于,提供了一种带有限位机构的石英晶体谐振器引脚定位工艺,包括以下步骤:
6.s1.1、限定,对石英晶体谐振器进行接触固定;
7.s1.2、定面,将石英晶体谐振器插件面平行于地面;
8.s1.3、拍图,拍摄石英晶体谐振器插件面作为图像;
9.s1.4、建轴,以图像插件面一端点为原点建立坐标轴;
10.s1.5、定点,根据坐标轴得出石英晶体谐振器插件孔坐标值;
11.s1.6、定心,确定插件孔中心位置的坐标点;
12.s1.7、定向,将引脚垂直于插件面;
13.s1.8、定脚,计算位移值并移动引脚插入插件孔。
14.作为本技术方案的进一步改进,所述s1.1中,限定具体步骤如下:
15.s2.1、连接,通过机械臂多点接触石英晶体谐振器非插件面对其进行固定连接;
16.s2.2、限位,机械臂带动石英晶体谐振器转动,调节其插件面朝向角度。
17.作为本技术方案的进一步改进,所述s1.2中,定面时通过机械臂带动石英晶体谐振器转动,使得石英晶体谐振器的插件面朝向正上方与地面保持平行。
18.作为本技术方案的进一步改进,所述s1.3中,拍图时通过摄像头进行拍摄,其中摄像头中轴线与石英晶体谐振器插件面相垂直,并且石英晶体谐振器插件面位于摄像头视野中央。
19.作为本技术方案的进一步改进,所述s1.4中建轴时以石英晶体谐振器插件面的任意端点为原点,建立直角坐标系,其中坐标系轴的单位长度为一个像素点。
20.作为本技术方案的进一步改进,所述s1.5中,定点时,取石英晶体谐振器插件面的圆形开口状插件孔的四点即最左点、最右点、最上点和最下点,其中最左点坐标为(x1,y1),最右点坐标为(x2,y2),最上点坐标为(x3,y3),最下点坐标为(x4,y4),x为横坐标,y为纵坐标。
21.作为本技术方案的进一步改进,所述1.6中,定心时,根据石英晶体谐振器的插件孔的四点坐标求得插件孔中心位置坐标值,即插件孔中心坐标值为
22.作为本技术方案的进一步改进,所述s1.7中,定向时,通过光线投影法判断引脚是否垂直于石英晶体谐振器插件面,即从引脚的远离插件面一端远处,向插件面垂直投射平行光线,使得引脚的投影落于插件面,当引脚的投影为一个点时,则引脚垂直于插件面,若是投影为一条线,则引脚不垂直于插件面。
23.作为本技术方案的进一步改进,所述s1.8中,定脚时包括以下步骤:
24.s3.1、定距,计算引脚与石英晶体谐振器插件孔中心位置的距离;
25.s3.2、移动,机械臂带动引脚横向、纵向移动到达插件孔中心位置并插入。
26.作为本技术方案的进一步改进,所述s3.1中,定距时设引脚在石英晶体谐振器插件面的投影点为m点,其坐标值为(xm,ym),则引脚一端与石英晶体谐振器的插件孔中心位置的距离即引脚的水平移动距离
27.与现有技术相比,本发明的有益效果:
28.1、该带有限位机构的石英晶体谐振器引脚定位工艺中,通过采用机械臂分别固定石英晶体谐振器和引脚,通过划分直角坐标系对石英晶体谐振器的插件孔中心点位置和引脚的一端进行定位,并使得引脚垂直于石英晶体谐振器的插件面,使得引脚一端对准插件孔,确保石英晶体谐振器的引脚插件质量。
29.2、该带有限位机构的石英晶体谐振器引脚定位工艺中,通过将插件面与地面保持平行,使得引脚在重力作用下自然垂直于插件面,从而避免由于重力导致的引脚歪斜,通过将摄像头垂直于石英晶体谐振器插件面,以及将石英晶体谐振器插件面置于摄像头视野中央的方式,能够避免由于摄像元件的光学畸变,所导致的图像与实际插件面的误差。
附图说明
30.图1为本发明的整体流程示意图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.实施例1
34.请参阅图1所示,本实施例目的在于,提供了一种带有限位机构的石英晶体谐振器引脚定位工艺,包括以下步骤:
35.s1.1、限定,对石英晶体谐振器进行接触固定;
36.s1.2、定面,将石英晶体谐振器插件面平行于地面;
37.s1.3、拍图,拍摄石英晶体谐振器插件面作为图像;
38.s1.4、建轴,以图像插件面一端点为原点建立坐标轴;
39.s1.5、定点,根据坐标轴得出石英晶体谐振器插件孔坐标值;
40.s1.6、定心,确定插件孔中心位置的坐标点;
41.s1.7、定向,将引脚垂直于插件面;
42.s1.8、定脚,计算位移值并移动引脚插入插件孔。
43.进一步的,s1.1中,限定具体步骤如下:
44.s2.1、连接,通过机械臂多点接触石英晶体谐振器非插件面对其进行固定连接;
45.s2.2、限位,机械臂带动石英晶体谐振器转动,调节其插件面朝向角度。
46.进一步的,s1.2中,定面时通过机械臂带动石英晶体谐振器转动,使得石英晶体谐振器的插件面朝向正上方与地面保持平行,通过将插件面与地面保持平行,使得引脚在重力作用下自然垂直于插件面,从而避免由于重力导致的引脚歪斜问题。
47.再进一步的,s1.3中,拍图时通过摄像头进行拍摄,其中摄像头中轴线与石英晶体谐振器插件面相垂直,并且石英晶体谐振器插件面位于摄像头视野中央,通过将摄像头垂直于石英晶体谐振器插件面,以及将石英晶体谐振器插件面置于摄像头视野中央的方式,能够避免由于摄像元件的光学畸变,所导致的图像与实际插件面的误差问题。
48.更进一步的,s1.4中建轴时以石英晶体谐振器插件面的任意端点为原点,建立直角坐标系,其中坐标系轴的单位长度为一个像素点。
49.除此之外,s1.5中,定点时,取石英晶体谐振器插件面的圆形开口状插件孔的四点即最左点、最右点、最上点和最下点,其中最左点坐标为(x1,y1),最右点坐标为(x2,y2),最上点坐标为(x3,y3),最下点坐标为(x4,y4),x为横坐标,y为纵坐标。
50.具体的,1.6中,定心时,根据石英晶体谐振器的插件孔的四点坐标求得插件孔中心位置坐标值,即插件孔中心坐标值为
51.进一步的,s1.7中,定向时,通过光线投影法判断引脚是否垂直于石英晶体谐振器插件面,即从引脚的远离插件面一端远处,向插件面垂直投射平行光线,使得引脚的投影落于插件面,当引脚的投影为一个点时,则引脚垂直于插件面,若是投影为一条线,则引脚不垂直于插件面。
52.再进一步的,s1.8中,定脚时包括以下步骤:
53.s3.1、定距,计算引脚与石英晶体谐振器插件孔中心位置的距离;
54.s3.2、移动,机械臂带动引脚横向、纵向移动到达插件孔中心位置并插入。
55.其中,s3.1中,定距时设引脚在石英晶体谐振器插件面的投影点为m点,其坐标值为(xm,ym),则引脚一端与石英晶体谐振器的插件孔中心位置的距离即引脚的水平移动距离
56.本实施例在具体使用时,机械臂通过多点接触的方式,与石英晶体谐振器的非插件面进行接触,对其进行固定,机械臂带动石英晶体谐振器进行转动,并使得石英晶体谐振器的插件面与地面保持平行,通过与插件面相垂直的摄像头,对插件面进行图像拍摄,并且以插件面的任一端点为原点,建立单位长度为1个像素点的直角坐标系,由于石英晶体谐振器的插件孔是圆形开口状,根据坐标系得知插件孔的最左点、最右点、最上点和最下点,并根据这四点求得插件孔中心点位置的坐标值,机械臂抓取引脚并使得引脚垂直于插件面,通过引脚远离插件面一端远处向插件面垂直投射平行光线,使得引脚的投影点落于插件面,根据坐标轴得知投影点坐标值,进而得知引脚投影点与插件孔中心点的距离,机械臂带动引脚沿着插件面水平移动相应距离,并插入插件孔内,从而确保引脚的插件质量。
57.对比例1
58.一种带有限位机构的石英晶体谐振器引脚定位工艺,包括以下步骤:
59.s1.1、限定,对石英晶体谐振器进行接触固定;
60.s1.2、定面,将石英晶体谐振器插件面平行于地面;
61.s1.3、定向,将引脚垂直于插件面;
62.s1.4、定脚,移动引脚插入插件孔。
63.进一步的,s1.1中,限定具体步骤如下:
64.s2.1、连接,通过机械臂多点接触石英晶体谐振器非插件面对其进行固定连接;
65.s2.2、限位,机械臂带动石英晶体谐振器转动,调节其插件面朝向角度。
66.进一步的,s1.2中,定面时通过机械臂带动石英晶体谐振器转动,使得石英晶体谐振器的插件面朝向正上方与地面保持平行,通过将插件面与地面保持平行,使得引脚在重力作用下自然垂直于插件面,从而避免由于重力导致的引脚歪斜问题。
67.进一步的,s1.3中,定向时,通过光线投影法判断引脚是否垂直于石英晶体谐振器插件面,即从引脚的远离插件面一端远处,向插件面垂直投射平行光线,使得引脚的投影落于插件面,当引脚的投影为一个点时,则引脚垂直于插件面,若是投影为一条线,则引脚不垂直于插件面。
68.再进一步的,s1.4中,定脚时,机械臂带动引脚横向、纵向移动到达插件孔中心位置并插入。
69.实验例1
70.本发明的一种带有限位机构的石英晶体谐振器引脚定位工艺中,通过摄像头拍摄石英晶体谐振器的插件面,并在插件面图像中以插件面任一端点建立直角坐标系,对石英晶体谐振器的插件孔和引脚进行定位,能够确保引脚准确插入插件孔中心点,提高石英晶体谐振器的引脚插件质量,为了验证相关的技术方案,本发明人进行了如下试验:
71.将上述实施例1和对比例1中的一种带有限位机构的石英晶体谐振器引脚定位工
艺做石英晶体谐振器的引脚插件质量进行对比,a组采用实施例1中的一种带有限位机构的石英晶体谐振器引脚定位工艺,b组采用对比例1中的一一种带有限位机构的石英晶体谐振器引脚定位工艺,各自插件加工出10000件石英晶体谐振器,比较两者所加工的石英晶体谐振器的不良品数量和引脚与插件孔中心的平均误差,并将数据填表,其结果如表1:
72.表1
[0073] 不良品数量/个误差/毫米实施例1280.2对比例14200.9
[0074]
由表1可已看出,本发明实施例1提供的一种带有限位机构的石英晶体谐振器引脚定位工艺,相较于对比例1,插件加工出的石英晶体谐振器不良品数量和平均误差明显较低,因此可以说明,该带有限位机构的石英晶体谐振器引脚定位工艺的引脚与插件孔孔位误差较低,从而提升石英晶体谐振器的插件质量。
[0075]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。