摆动跟踪和控制
1.本专利申请要求于2019年4月4日提交的题为“摆动跟踪和控制”的美国非临时申请号16/375,765的优先权,该申请已转让给其受让人并且在此通过引用明确并入本文。
技术领域
2.本公开的各方面一般涉及缓冲器,更具体地涉及对缓冲器的输出摆动的跟踪和控制。
背景技术:
3.在无线通信系统(例如,毫米波(mmwave)系统)中,本地振荡器(lo)网络可以用于将来自lo的lo信号分配到系统中的混频器。lo网络可以包括用于利用lo信号驱动混频器的缓冲器。缓冲器各自可以包括具有变压器的驱动器作为负载以提高功率效率的驱动器。
技术实现要素:
4.以下呈现了一个或多个实现方式的简化概述,以便提供对这样的方式的基本理解。该概述不是所有预期实现方式的广泛概述,既不旨在标识所有实现方式的关键或关键要素,也不旨在描绘任何或所有实现方式的范围。其唯一目的是以简化形式呈现一个或多个实现方式的一些概念,作为稍后呈现的更详细描述的序言。
5.第一方面涉及一种用于缓冲输入信号的装置。该装置包括变压器,该变压器包括输入电感器和输出电感器,其中输入电感器磁性耦合到输出电感器。该装置还包括跨导驱动器,该跨导驱动器被配置为基于输入信号来驱动输入电感器。该装置还包括反馈电路,该反馈电路被配置为检测输出电感器处的输出电压摆动,在输入电感器处生成经调节的电压,并且基于所检测的输出电压摆动来控制经调节的电压。
6.第二方面涉及一种用于控制缓冲器的输出电压摆动的方法。缓冲器包括变压器和驱动器,该变压器包括输入电感器和输出电感器,输入电感器由驱动器驱动,并且输入电感器磁性耦合到输出电感器。该方法包括:检测输出电感器处的输出电压摆动;以及基于所检测的输出电压摆动来控制输入电感器处的经调节的电压。
7.第三方面涉及一种用于缓冲输入信号的装置。该装置包括变压器,该变压器包括输入电感器和输出电感器,其中输入电感器磁性耦合到输出电感器。该装置还包括跨导驱动器,该跨导驱动器被配置为基于输入信号来驱动输入电感器。该装置还包括反馈电路,该反馈电路被配置为检测输出电感器处的输出电压摆动,并且基于所检测的输出电压摆动来控制驱动器的偏置电流。
8.第四方面涉及一种用于缓冲输入信号的装置。该装置包括变压器,该变压器包括输入电感器和输出电感器,其中输入电感器磁性耦合到输出电感器。该装置还包括用于基于输入信号来驱动输入电感器的部件;用于检测输出电感器处的输出电压摆动的部件;用于在输入电感器处生成经调节的电压的部件;以及用于基于所检测的输出电压摆动来控制经调节的电压的部件。
9.为了实现上述和相关目的,一个或多个实现方式包括在下文中充分描述并且在权利要求中特别指出的特征。以下描述和附图详细阐述了一个或多个实现方式的某些说明性方面。然而,这些方面仅指示可以采用各种实现方式的原理的各种方式中的几种方式,并且所描述的实现方式旨在包括所有这些方面及其等同物。
附图说明
10.图1a示出了根据本公开的某些方面的包括跨导驱动器和变压器的缓冲器的示例。
11.图1b示出了根据本公开的某些方面的跨导驱动器的示例性实现方式。
12.图2示出了根据本公开的某些方面的用于跟踪和控制缓冲器的输出电压摆动的反馈电路的示例。
13.图3示出了根据本公开的某些方面的峰值检测器、控制电路和电压调节器的示例性实现方式。
14.图4示出了根据本公开的某些方面的复制电路的示例性实现方式。
15.图5示出了根据本公开的某些方面的用于将lo信号分配到多个混频器的本地振荡器(lo)网络的示例。
16.图6a示出了根据本公开的某些方面的能够在多个缓冲器之间切换的反馈电路的示例。
17.图6b示出了根据本公开的某些方面的能够在多个缓冲器之间切换的反馈电路的另一示例。
18.图6c示出了根据本公开的某些方面的能够在多个缓冲器之间切换的反馈电路的又一示例。
19.图7示出了根据本公开的某些方面的跨导驱动器的示例性实现方式。
20.图8示出了根据本公开的某些方面的用于跟踪和控制缓冲器的输出电压摆动的反馈电路的另一示例。
21.图9示出了根据本公开的某些方面的峰值检测器和控制电路的其他示例性实现方式。
22.图10是示出了根据本公开的某些方面的用于控制缓冲器的输出电压摆动的方法的流程图。
23.图11示出了根据本公开的某些方面的用于相控天线阵列的接收器的示例。
24.图12示出了根据本公开的某些方面的用于将lo信号提供给图11所示的接收器中的混频器的lo网络的示例。
25.图13示出了根据本公开的某些方面的用于相控天线阵列的接收器的另一示例。
26.图14示出了根据本公开的某些方面的用于将lo信号提供给图13所示的接收器中的混频器的lo网络的示例。
27.图15示出了根据本公开的某些方面的用于相控天线阵列的发射器的示例。
28.图16示出了根据本公开的某些方面的用于将lo信号提供给图15所示的发射器中的混频器的lo网络的示例。
29.图17示出了根据本公开的某些方面的用于相控天线阵列的发射器的另一示例。
30.图18示出了根据本公开的某些方面的用于向图17所示的发射器中的混频器提供
lo信号的lo网络的示例。
具体实施方式
31.下文结合附图所阐述的具体实施方式旨在作为对各种配置的描述,并不旨在表示其中可以实践本文中所描述的概念的唯一配置。具体实施方式包括用于提供对各种概念的透彻理解的特定细节。然而,对于本领域技术人员而言,显而易见的是,可以在没有这些具体细节的情况下实践这些概念。在一些实例中,众所周知的结构和部件以框图形式示出,以免混淆这些概念。
32.在无线通信系统(例如,毫米波系统)中,本地振荡器(lo)网络可以用于将来自lo的lo信号分配到系统中的混频器。lo网络可以包括用于利用lo信号驱动混频器的缓冲器。例如,当lo缺乏直接驱动混频器的驱动能力时,缓冲器可以用于驱动混频器。另外,缓冲器可以向lo提供与lo网络中的负载(例如,混频器负载)的高度隔离,以防止负载降低lo的性能。例如,缓冲器可以向lo提供与lo网络中负载改变的高度隔离,以防止负载改变引起lo的振荡器频率发生较大偏移,从而降低lo信号。
33.图1a示出了根据本公开的某些方面的缓冲器105的示例。缓冲器105包括跨导驱动器110和变压器120,其中变压器120用作跨导驱动器110的负载以增加输出阻抗并且提高功率效率。变压器120包括输入电感器125和输出电感器130,其中输入电感器125磁性耦合到输出电感器130。
34.跨导驱动器110基于输入信号来驱动输入电感器125。在一个示例中,输入信号为差分输入电压(vin 和vin
‑
)。在该示例中,跨导驱动器110将差分输入电压(vin 和vin
‑
)转换为驱动电流以驱动输入电感器125。驱动电流在输出电感器130处转换为差分输出电压(vp和vm),该差分输出电压输出到另一设备(例如,混频器)。在图1a的示例中,输入电感器125的中心抽头127耦合到电压供应轨。
35.图1b示出了根据本公开的某些方面的跨导驱动器110的示例性实现方式。在该示例中,跨导驱动器110具有差分输入,该差分输入被配置为接收差分输入电压(vin 和vin
‑
)。差分输入包括第一输入172和第二输入174,其中第一输入172接收电压vin 而第二输入174接收电压vin
‑
。在该示例中,跨导驱动器110包括形成差分对的第一晶体管160和第二晶体管165。第一晶体管160和第二晶体管165可以通过n型场效应晶体管(nfet)来实现,尽管在某些实现方式中可以使用其他晶体管类型。在该示例中,第一晶体管160的漏极耦合到输入电感器125的第一端126,第一晶体管160的源极耦合到接地,并且第一晶体管160的栅极经由第一耦合电容器170耦合到第一输入172。第二晶体管165的漏极耦合到输入电感器125的第二端128,第二晶体管165的源极耦合到接地,并且第二晶体管165的栅极经由第二耦合电容器175耦合到第二输入174。输入电感器125耦合在第一晶体管160和第二晶体管165的漏极之间。
36.操作时,第一晶体管160和第二晶体管165将差分输入电压转换为驱动输入电感器125的驱动电流。跨导驱动器110还包括偏置电路180,该偏置电路180耦合到第一晶体管160和第二晶体管165的栅极。偏置电路180被配置为使用栅极偏置电压偏置第一晶体管160的栅极和第二晶体管165的栅极。
37.在该示例中,缓冲器105的输入对应于跨导驱动器110的差分输入172和174,并且
缓冲器105的输出对应于输出电感器130的两端132和134。缓冲器105可以用于在缓冲器105的输入和输出之间提供高隔离(例如,20db或更高)。在一个示例中,缓冲器105可以用于在耦合到缓冲器105的输入的lo与耦合到缓冲器105的输出的混频器之间提供高隔离。
38.在某些方面中,缓冲器105用作本地振荡器(lo)路径中的缓冲器,该缓冲器将lo信号从lo(未示出)提供给混频器140。在这些方面中,缓冲器105使用lo信号(例如,正弦信号)驱动混频器140。如图1a和图1b所示,lo信号为缓冲器105的输入处的差分电压vin 和vin
‑
以及缓冲器105的输出处的差分电压vp和vm。混频器140被配置为将lo信号与输入信号145混频以对输入信号145进行频移。例如,混频器140可以在接收器中用于将射频(rf)输入信号145下变频为中频输出信号150。在另一示例中,混频器140可以在发射器中用于将中频输入信号145上变频为rf输出信号150。在图1a和图1b所示的示例中,lo信号为差分信号。输入信号145和输出信号150也可以是差分信号。
39.缓冲器105能够在毫米波频带中的非常高的频率(例如,数十ghz)下操作。这使得缓冲器105适于毫米波系统,这些毫米波系统例如用于第五代(5g)无线通信。然而,使用缓冲器105的挑战在于缓冲器105的输出电压摆动可以跨越工艺
‑
电压
‑
温度(ptv)拐角发生变化(例如,超过6db)。这是因为输出电压摆动是电流限制的,而非电压限制的。输出电压摆动变化的负面影响可能包括以下各项中的一项或多项:功耗过大、信号路径增益变化、lo泄漏增加、以及可靠性问题。
40.关于功耗过大,混频器140可能需要最小lo摆动来驱动混频器140。为了确保跨pvt拐角满足最小lo摆动要求,可以设置跨导驱动器110的偏置电流,以使缓冲器105的输出电压摆动满足最坏情况pvt拐角的最小lo摆动要求。然而,这种途径可能使得输出电压摆动显著高于一些pvt拐角的最小lo摆动要求。因此,对于这些pvt角,lo摆动可能显著高于驱动混频器140所需的摆动,从而导致这些pvt拐角的功耗过大。
41.关于信号路径增益变化,信号路径增益可能随着混频器140处的lo摆动而变化。结果,跨越pvt拐角的缓冲器105的输出电压摆动的变化可能导致信号路径增益跨越pvt拐角的变化。在这种情况下,信号路径增益校准可能很难校准信号路径增益以适应温度范围内lo摆动的变化。
42.关于lo泄漏,混频器140处的lo信号的一部分泄漏到混频器140的输出中。针对一些pvt拐角,输出电压摆动(以及因此混频器140处的lo摆动)可能显著增加(例如,增加6db),从而加剧lo泄漏。
43.关于可靠性,一些pvt拐角的大输出电压摆动(以及因此混频器140处的大lo摆动)可以导致设备出现故障(例如,通过超出这些器件的容限)。如果不太有效的途径对大lo摆动具有更高的容差,则这可能会迫使设计人员避免使用性能方面最有效的途径。
44.为了减少上文所讨论的摆动变化,本公开的各方面跟踪并控制缓冲器105的输出电压摆动。在一些实现方式中,反馈电路检测缓冲器105的输出电压摆动(例如,使用峰值检测器),并且基于所检测的输出电压摆动来调整输出电压摆动,以保持输出电压摆动接近目标电压摆动(即,近似等于目标电压摆动)。为了保持输出电压摆动接近目标电压摆动,反馈电路可以在所检测的输出电压摆动高于目标电压摆动时减小输出电压摆动,以使输出电压摆动更接近目标电压摆动,并且在所检测的输出电压摆动低于目标电压摆动时增加输出电压摆动,以使输出电压摆动更接近目标电压摆动。反馈电路可以通过调整缓冲器105的影响
输出电压摆动的参数来调整缓冲器105的输出电压摆动。该参数可以包括输入电感器125处的电压和/或跨导驱动器110的偏置电流,如下文所进一步讨论的。
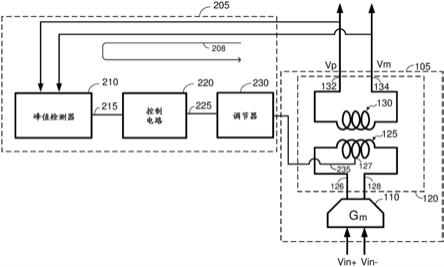
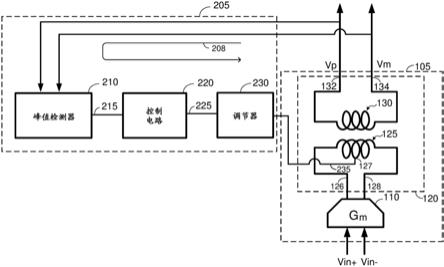
45.图2示出了根据本公开的某些方面的用于跟踪和控制缓冲器105的输出电压摆动的反馈电路205的示例。在该示例中,反馈电路205通过控制输入电感器125(例如,输入电感器125的中心抽头127)处的经调节的电压235来控制输出电压摆动。缓冲器105的差分输出处的输出电压摆动近似为经调节的电压235的线性函数,其中,当经调节的电压235增加时,输出电压摆动增加,而当经调节的电压235减小时,输出电压摆动减小。因此,反馈电路205能够通过控制经调节的电压235来控制缓冲器105的输出电压摆动。
46.在某些方面中,反馈电路205被配置为检测输出电感器130处的输出电压摆动,在输入电感器125(例如,输入电感器125的中心抽头127)处生成经调节的电压235,并且基于所检测的输出电压摆动来控制经调节的电压235。在这些方面中,反馈电路205可以通过将所检测的输出电压摆动与目标电压摆动进行比较,并且沿减小输出电压摆动与目标电压摆动之间的差的方向调整经调节的电压235,基于所检测的输出电压摆动来控制经调节的电压235。例如,如果所检测的输出电压摆动高于目标电压摆动,则反馈电路205可以减小经调节的电压235以减小输出电压摆动。如果所检测的输出电压摆动低于目标电压摆动,则反馈电路205可以增加经调节的电压235以增加输出电压摆动。这样,反馈电路205基于所检测的输出电压摆动来调整经调节的电压235以保持缓冲器105的输出电压摆动接近目标电压摆动。
47.在图2所示的示例中,反馈电路205包括耦合在反馈回路208中的峰值检测器210、控制电路220和电压调节器230。峰值检测器210被配置为检测输出电压摆动,电压调节器230被配置为生成经调节的电压235,并且控制电路220被配置为基于所检测的输出电压摆动来控制由电压调节器230生成的经调节的电压235,如下文所进一步讨论的。
48.峰值检测器210具有耦合到缓冲器105的差分输出的差分输入。峰值检测器210被配置为检测缓冲器105的差分输出处的输出电压摆动,并且基于所检测的输出电压摆动来生成摆动检测信号215。输出电压摆动可以近似等于缓冲器105的正输出处的电压vp与缓冲器105的负输出处的电压vm之间的峰值差。在某些方面中,摆动检测信号215可以为与缓冲器105的输出电压摆动有关(例如,成比例)的电压,如下文所进一步讨论的。
49.控制电路220被配置为从峰值检测器210接收摆动检测信号215,并且基于摆动检测信号215来生成控制信号225。控制信号225输入到电压调节器230以控制由电压调节器230生成的经调节的电压235。
50.电压调节器230耦合到输入电感器125。在某些方面中,电压调节器230耦合到输入电感器125的中心抽头127(尽管可能存在其中可以使用其他抽头点的可能实现方式)。电压调节器230被配置为由供应电压生成经调节的电压235,并且将经调节的电压235施加到输入电感器125(例如,中心抽头127处)。由电压调节器230生成的经调节的电压235由来自控制电路220的控制信号225控制。
51.在某些方面中,控制电路220通过将摆动检测信号215与对应于目标电压摆动的目标参考信号进行比较,并且基于比较来生成控制信号225来生成控制信号225。在这些方面中,目标参考信号提供参考点,摆动检测信号215与该参考点进行比较以评估输出电压摆动是高于还是低于目标电压摆动。在一个示例中,当摆动检测信号215近似等于参考目标信号
时,输出电压摆动近似等于目标电压摆动。在该示例中,参考目标信号指示当输出电压摆动等于目标电压摆动时,摆动检测信号215应当具有的值(例如,电压)。如果摆动检测信号215高于参考目标信号,则输出电压摆动高于目标电压摆动,并且如果摆动检测信号215低于参考目标信号,则输出电压摆动低于目标电压摆动。在该示例中,控制电路220通过沿减小摆动检测信号215与目标参考信号之间的差的方向调整经调节的电压235来保持输出电压摆动接近目标电压摆动。
52.因此,反馈电路205基于输出电压摆动的反馈来调整经调节的电压235以保持缓冲器105的输出电压摆动接近目标电压摆动。反馈电路205能够保持输出电压摆动接近跨越pvt拐角的目标电压摆动,从而与不用反馈来控制输出电压摆动的系统相比较,显著减少了跨越pvt拐角的输出电压摆动的变化。跨越pvt拐角的输出电压摆动的变化的减小减轻了上文参考图1a和图1b所讨论的过量功耗、信号路径增益变化、lo泄漏增加和/或可靠性问题。
53.对于其中缓冲器105用于从lo向混频器140提供lo信号的lo路径中的示例,目标电压摆动可以设置为接近用于驱动混频器140的最小lo摆动要求(例如,使功耗最小化)。在该示例中,反馈电路205保持缓冲器105的输出电压摆动接近跨越pvt拐角的最小lo摆动。这有助于防止输出电压摆动显著高于一些pvt拐角的最小lo摆动,这会导致功耗过多、lo泄漏增加和/或上述可靠性问题。
54.除了缓冲器105之外,从lo到混频器140的lo路径可以包括一个或多个其他设备。一个或多个其他设备可以包括放大器、另一缓冲器、移相器和/或矢量调制器。在该示例中,缓冲器105可以刚好放置在混频器140之前的lo路径(也称为lo链)的末端。将缓冲器105放置在lo路径的末端允许反馈电路205控制混频器140处的lo摆动。通过控制lo路径的末端的lo摆动,反馈电路205能够清除由缓冲器105之前的lo路径中的一个或多个其他设备引起的摆动变化。这是因为反馈电路205保持缓冲器105的输出电压摆动接近目标电压摆动,这有助于防止由lo路径中的一个或多个前述设备引起的摆动变化传播到混频器140。在该示例中,来自lo路径中的一个或多个前述设备的摆动变化可以包括调幅(am)噪声、由于一个或多个前述设备中的pvt变化引起的摆动变化、和/或一个或多个前述设备中的非理想性。
55.反馈电路205基于输出电压摆动的反馈来调整输入电感器125处的经调节的电压235,以保持缓冲器105的输出电压摆动接近目标电压摆动。因此,在该示例中,输入电感器125处的经调节的电压235为被调整为控制输出电压摆动的缓冲器105的参数。如上文所讨论的,缓冲器105的输出电压摆动近似为输入电感器125处的经调节的电压235的线性函数。经调节的电压235与输出电压摆动之间的近似线性关系有助于为反馈回路208提供良好的环路稳定性。
56.图3示出了根据本公开的某些方面的峰值检测器210、控制电路220和电压调节器230的示例性实现方式。在图3的示例中,峰值检测器210包括第一晶体管310、第二晶体管315、电流源320和保持电容器325。第一晶体管310和第二晶体管315可以使用n型场效应晶体管(nfet)来实现,尽管在某些实现方式中,p型晶体管或其他类型的晶体管是可能的。在该示例中,第一晶体管310的漏极耦合到电压供应轨,第一晶体管310的源极耦合到节点322,并且第一晶体管310的栅极通过第一耦合电容器312耦合到缓冲器105的正输出。第一晶体管310的栅极通过第一偏置电阻器(标记为“rb1”)dc偏置了偏置电压(标记为“vbias”)。第二晶体管315的漏极耦合到电压供应轨,第二晶体管315的源极耦合到节点
322,并且第二晶体管315的栅极通过第二耦合电容器318耦合到缓冲器105的负输出。第二晶体管315的栅极通过第二偏置电阻器(标记为“rb2”)dc偏置了偏置电压vbias。电流源320耦合在节点322与接地之间,并且保持电容器325耦合在节点322与接地之间。
57.第一晶体管310和第二晶体管315被配置为源极跟随器,其中缓冲器105的正输出vp输入到第一晶体管310的栅极,缓冲器105的负输出vm输入到第二晶体管315的栅极,并且峰值检测器210的输出在节点322处耦合到第一晶体管310的源极和第二晶体管315的源极。在这种配置中,第一晶体管310和第二晶体管315用作整流器,这些整流器与保持电容器325组合,在节点322处产生与缓冲器105的输出电压摆动相关(例如,成比例)的感测电压(标记为“vsen”)。保持电容器325在峰值检测器210的输出处保持感测电压vsen。在一个示例中,感测电压vsen和输出电压摆动通过比例相关,该比例为偏置电压vbias的函数。在该示例中,在输出电压摆动范围内,对于较高的输出电压摆动,感测电压vsen较高,而对于较低的输出电压摆动,感测电压vsen较低。因此,感测电压vsen跟踪输出电压摆动的改变。感测电压vsen相对于lo信号的频率缓慢发生变化,因此可以被认为近似于相对于lo信号的dc电压。在该示例中,感测电压vsen对应于上文所讨论的摆动检测信号215,并且基于偏置电压vbias和缓冲器105的输出电压摆动来生成。
58.电流源320为第一晶体管310和第二晶体管315提供偏置电流。电流源320还帮助峰值检测器210跟踪缓冲器105的输出电压摆动的改变。例如,如果输出电压摆动减小,则电流源320释放保持电容器325上的电荷中的一些电荷以允许感测电压vsen减小以反映输出电压摆动的减小。
59.在图3的示例中,控制电路220包括运算放大器330和复制电路335。复制电路335的结构可以与峰值检测器210的结构相同或基本相同。如下文所进一步讨论的,复制电路335用于设置反馈电路205的目标电压摆动,并且抵消由于峰值检测器210中的pvt条件而引起的感测电压vsen的变化。
60.图4示出了根据某些方面的复制电路335的示例性实现方式。在该示例中,复制电路335包括第一晶体管410、第二晶体管415、电流源420和保持电容器425。第一晶体管410的漏极耦合到电压供应轨,第一晶体管410的源极耦合到节点422,并且第一晶体管410的栅极偏置了目标电压(标记为“vtarget”)。第二晶体管415的漏极耦合到电压供应轨,第二晶体管415的源极耦合到节点422,并且第二晶体管415的栅极偏置了目标电压vtarget。电流源420耦合在节点422与接地之间,并且保持电容器425耦合在节点422与接地之间。
61.复制电路335在结构上类似于峰值检测器210,其中复制电路335的第一晶体管410、第二晶体管415、电流源420和保持电容器425分别对应于峰值检测器210的第一晶体管310、第二晶体管315、电流源320和保持电容器325。与峰值检测器210不同,复制电路335的第一晶体管410和第二晶体管415的栅极不耦合到缓冲器105的差分输出。第一晶体管410和第二晶体管415的栅极偏置了目标电压vtarget,该目标电压vtarget用于设置目标电压摆动,如下文所进一步讨论的。复制电路335基于目标电压vtarget在节点422处来生成dc参考电压vref。在该示例中,参考电压vref对应于上文所讨论的目标参考信号。
62.回到图3,感测电压vsen输入到放大器330的负输入,并且参考电压vref输入到放大器330的正输入。放大器330的输出向电压调节器230提供控制信号225。
63.操作时,放大器330沿减小感测电压vsen与输入到放大器330的参考电压vref之间
的差的方向调整控制信号225。例如,如果感测电压vsen低于参考电压vref,则放大器330沿使得电压调节器230增加经调节的电压235的方向调整控制信号225。增加经调节的电压235则增加了缓冲器105的输出电压摆动,这又增加了感测电压vsen。如果感测电压vsen高于参考电压vref,则放大器330沿使得电压调节器230减小经调节的电压235的方向调整控制信号225。减小经调节的电压235则减小了缓冲器105的输出电压摆动继,这又减小了感测电压vsen。
64.因此,放大器330迫使感测电压vsen近似等于参考电压vref(即,近似平衡vsen和vref)。这在缓冲器105的输出电压摆动近似等于目标电压vtarget减去偏置电压vbias(即,vtarget
‑
vbias)时发生。结果,反馈电路205调整经调节的电压235,使得缓冲器105的输出电压摆动近似等于vtarget
‑
vbias。因此,在该示例中,反馈电路205的目标电压摆动近似等于vtarget
‑
vbias。
65.因此,可以根据期望目标电压摆动通过设置峰值检测器210和复制电路335的偏置电压(即,vbias和vtarget)来设置目标电压摆动。例如,对于给定偏置电压vbias,可以通过在复制电路335处设置目标电压vtarget来设置目标电压摆动,使得vtarget
‑
vbias等于期望目标电压摆动。在这点上,偏置电压vbias和目标电压vtarget可以由电压生成器350生成器。电压生成器350可以被配置为设置偏置电压vbias和目标电压vtarget的电压电平,使得vtarget
‑
vbias等于期望目标电压摆动。
66.如上文所讨论的,复制电路335还用于抵消由于峰值检测器210中的pvt条件而引起的感测电压vsen的变化。在这点上,复制电路335可以集成在同一芯片上(即,管芯)作为峰值检测器210。在某些方面中,复制电路335可以位于非常接近峰值检测器210的位置,以使复制电路335经受与峰值检测器210近似相同的pvt条件。结果,由于pvt条件而引起的参考电压vref的变化与由于pvt条件而引起的感测电压vsen的变化近似相同。由于放大器330在其输入处采用感测电压vsen和参考电压vref的差,所以由于pvt条件而引起的参考电压vref的变化近似抵消了由于pvt条件而引起的感测电压vsen的变化。这减少了对控制信号225的pvt效应,从而导致对输出电压摆动的更准确控制。
67.在图3的示例中,电压调节器230通过晶体管340(例如,nfet)实现,该晶体管340具有耦合到电压供应轨的漏极、耦合到输入电感器125(例如,中心抽头127处)的源极、以及耦合到控制信号225的栅极。在该示例中,晶体管340将电流从电压供电轨提供给输入电感器125。经调节的电压235近似等于供电轨处的电压减去晶体管340两端的电压降。在该示例中,控制电路220通过控制晶体管340的信道电导来控制经调节的电压235,其又控制晶体管340两端的电压降。例如,为了增加经调节的电压235,控制电路220增加晶体管340的信道电导(即,减小晶体管340的电阻)。增加信道电导降低了晶体管340两端的电压降,从而提高了经调节的电压235。为了减小经调节的电压235,控制电路220减小晶体管340的信道电导(即,增加晶体管340的电阻)。减小信道电导增加了晶体管340两端的电压降,从而降低了经调节的电压235。
68.对于晶体管340通过nfet(图3的示例中示出)实现的示例,控制电路220通过增加控制信号225的电压电平来增加晶体管340的信道电导并且通过减小控制信号225的电压电平来减小晶体管340的信道电导。对于图3所示的控制电路220的示例性实现方式,控制信号225由运算放大器330的输出提供。
69.如上文所讨论的,缓冲器105可以用于向混频器140提供lo信号的lo路径中。在某些方面中,缓冲器105的多个实例(即,副本)可以用于将lo信号分配到多个混频器的lo网络中。在这点上,图5示出了将来自lo(未示出)的lo信号分配给第一混频器140
‑
1和第二混频器140
‑
2的lo网络的示例。尽管在图5的示例中示出了两个混频器,应当领会,lo网络可以将lo信号分配给两个以上的混频器。在该示例中,lo网络包括第一缓冲器105
‑
1,该第一缓冲器105
‑
1被配置为缓冲用于第一混频器140
‑
1的lo信号;以及第二缓冲器105
‑
2,该第二缓冲器105
‑
2被配置为缓冲用于第二混频器140
‑
2的lo信号。缓冲器105
‑
1和105
‑
2中的每个缓冲器为图3所示的缓冲器105的单独实例,并且包括相应跨导驱动器110
‑
1和110
‑
2以及相应变压器120
‑
1和120
‑
2。
70.在一个示例中,第一混频器140
‑
1用于发射器,以将中频信号上变频为射频信号进行发射,第二混频器140
‑
2用于接收器以将所接收的信号下变频为中频信号。在该示例中,接收器和发射器可以是收发器的一部分其在发射与接收之间切换(例如,半双工)但不会同时发射和接收。因此,在该示例中,在给定时间仅使用第一混频器140
‑
1和第二混频器140
‑
2中的一个混频器。
71.图6a示出了用于一次一个地跟踪和控制第一缓冲器105
‑
1和第二缓冲器105
‑
2的输出电压摆动的反馈电路的示例。在该示例中,反馈电路包括第一峰值检测器210
‑
1和第二峰值检测器210
‑
2、第一复制电路335
‑
1和第二复制电路335
‑
2、多路复用器610、运算放大器330和电压调节器230。在该示例中,运算放大器330和调节器230对于第一缓冲器105
‑
1和第二缓冲器105
‑
2而言共用。因为一次只使用第一混频器140
‑
1和第二混频器140
‑
2中的一个混频器,所以反馈电路能够将相同的运算放大器330和调节器230用于第一缓冲器105
‑
1和第二缓冲器105
‑
2。第一峰值检测器210
‑
1和第二峰值检测器210
‑
2各自都可以使用图3所示的示例性峰值检测器210来实现,并且第一复制电路335
‑
1和第二复制电路335
‑
2各自可以使用图4所示的示例性复制电路335来实现。
72.第一峰值检测器210
‑
1被配置为检测第一缓冲器105
‑
1的输出电压摆动,并且基于所检测的输出电压摆动来生成第一感测电压(标记为“vsen_1”)。第一复制电路335
‑
1被配置为基于目标电压来生成第一参考电压(标记为“vref_1”)。第二峰值检测器210
‑
2被配置为检测第二缓冲器105
‑
2的输出电压摆动,并且基于所检测的输出电压摆动来生成第二感测电压(标记为“vsen_2”)。第二复制电路335
‑
2被配置为基于目标电压来生成第二参考电压(标记为“vref_2”)。
73.第一感测电压vsen_1和第二感测电压vsen_2以及第一参考电压vref_1和第二参考电压vref_2输入到多路复用器610。多路复用器610依据在给定时间正在使用混频器140
‑
1和140
‑
2中的哪个混频器来选择感测电压中的一个感测电压和参考电压中的一个参考电压。例如,如果当前正在使用第一混频器140
‑
1,则多路复用器610选择第一感测电压vsen_1和第一参考电压vref_1。多路复用器610将所选择的感测电压耦合到放大器330的负输入,并且将所选择的参考电压耦合到放大器330的正输入。在这点上,多路复用器610可以接收选择信号(标记为“sel”),该选择信号指示感测电压中的感测电压和参考电压中的参考电压,并且选择由选择信号sel指示的感测电压和参考电压。
74.运算放大器330基于所选择的感测电压和参考电压的比较来生成控制信号225,并且将控制信号225输出到调节器230。控制信号225控制由调节器230生成的经调节的电压
235,其中经调节的电压235提供给第一缓冲器105
‑
1的输入电感器(例如,第一缓冲器105
‑
1的输入电感器的中心抽头处)和第二缓冲器105
‑
2的输入电感器(例如,第二缓冲器105
‑
2的输入电感器的中心抽头处)。
75.操作时,反馈电路基于对应于当前正在使用的混频器140
‑
1或140
‑
2的缓冲器105
‑
1或105
‑
2的输出电压摆动的反馈来调整经调节的电压235,使得输出电压摆动近似等于目标电压摆动。在图6a的示例中,峰值检测器210
‑
1和210
‑
2中的每个峰值检测器偏置了偏置电压vbias,复制电路335
‑
1至335
‑
2中的每个复制电路偏置了目标电压vtarget,并且目标电压摆动近似等于目标电压vtarget减去偏置电压vbias(即,vtarget
‑
vbias)。
76.虽然图6a示出了其中反馈电路包括用于第一缓冲器105
‑
1和第二缓冲器105
‑
2的单独复制电路335
‑
1和335
‑
2的示例,但是应当领会,本公开不限于该示例。例如,图6b示出了其中反馈电路包括用于第一缓冲器105
‑
1和第二缓冲器105
‑
2的公共复制电路335而非图6a所示的单独复制电路335
‑
1和335
‑
2的示例。在这个示例中,由复制电路335生成的参考电压(标记为“vref”)耦合到放大器330的正输入。与图6a中的多路复用器610相似,多路复用器620基于选择信号(标记为“sel”)来选择感测电压(标记为“vsen_1”和“vsen_2”)中的一个感测电压,并且将所选择的感测电压耦合到放大器330的负输入。在该示例中,由于缓冲器105
‑
1和105
‑
2在该示例中共享复制电路335,所以多路复用器620无需在图6a所示的参考电压(标记为“vref_1”和“vref_2”)之间进行选择。
77.图6c示出了其中反馈电路包括用于缓冲器105
‑
1和105
‑
2的公共峰值检测器210的另一示例。在该示例中,峰值检测器210所生成的感测电压耦合到放大器330的负输入。在该示例中,反馈电路包括多路复用器630,该多路复用器630被配置为选择性地将第一缓冲器105
‑
1和第二缓冲器105
‑
2中的一个缓冲器的差分输出耦合到峰值检测器210。多路复用器630包括耦合到第一缓冲器105
‑
1的差分输出的第一差分输入、耦合到第二缓冲器105
‑
2的差分输出的第二差分输入、以及耦合到峰值检测器210的差分输入的差分输出。操作时,多路复用器630基于选择信号(标记为“sel”)来选择第一缓冲器105
‑
1和第二缓冲器105
‑
2中一个缓冲器的差分输出,并且将所选择的差分输出耦合到峰值检测器210。在某些方面中,选择信号选择对应于当前正在使用的混频器的缓冲器的差分输出。
78.图7示出了根据本公开的某些方面的跨导驱动器110中的偏置电路180的示例性实现方式。在该示例中,偏置电路180包括电流源725以及用于设置跨导驱动器110的偏置电流的电流镜晶体管730(例如,nfet)。电流源725被配置为提供电流(例如,dc电流)的来源。电流源725耦合在电源轨和电流镜晶体管730的漏极之间。电流镜晶体管730的漏极和栅极系接在一起,并且电流镜晶体管730的源极耦合到接地。电流镜晶体管730的栅极通过第一栅极电阻器(标记为“rg1”)耦合到第一晶体管160的栅极并且通过第二栅极电阻器(标记为“rg2”)耦合到第二晶体管165的栅极。电流镜晶体管730与第一晶体管160和第二晶体管165一起形成电流镜,其中电流镜偏置第一晶体管160的栅极和第二晶体管165的栅极,使得从电流源725流入电流镜晶体管730的电流在第一晶体管160和第二晶体管165处被镜像。
79.操作时,电流源725的电流流入电流镜晶体管730,并且在第一晶体管160和第二晶体管165处被镜像。结果,第一晶体管160处的偏置电流与由电流源725提供的电流相等或成比例,并且第二晶体管165处的偏置电流与由电流源725提供的电流相等或成比例。因此,在该示例中,跨导驱动器110的偏置电流通过电流源725的电流设置。如下文所进一步讨论的,
电流源725可以具有可调电流以使得能够调整跨导驱动器110的偏置电流。
80.图8示出了根据本公开的某些方面的用于跟踪和控制缓冲器105的输出电压摆动的反馈电路805的另一示例。反馈电路805通过调整跨导驱动器110的偏置电流来调整缓冲器105的输出电压摆动。因此,在该示例中,跨导驱动器110的偏置电流为被调整为控制输出电压摆动而非输入电感器125处的经调节的电压235的参数。
81.在图8的示例中,输入电感器125的中心抽头127耦合到电压供应轨。此外,跨导驱动器110中的电流源725具有可调电流,该可调电流允许反馈电路805电调整跨导驱动器110的偏置电流,如下文所进一步讨论的。在图8的示例中,电流源725通过电流源晶体管830(例如,nfet)实现,其中电流源晶体管830的漏极耦合到电源轨,并且电流源晶体管830的源极耦合到电流镜晶体管730的漏极。在该示例中,电流源725的电流由电流源晶体管830的栅极电压控制。由于电流源725的电流在第一晶体管160和第二晶体管165处通过电流镜晶体管730被镜像,所以电流源晶体管830的栅极电压控制第一晶体管160和第二晶体管165处的偏置电流。在这个示例中,电流偏置可以在栅极电压增加时增加,而在栅极电压减小时减小。
82.在某些方面中,反馈电路805被配置为检测输出电感器130处的输出电压摆动,并且基于所检测的输出电压摆动来控制跨导驱动器110的偏置电流。在这些方面中,反馈电路805可以通过将所检测的输出电压摆动与目标电压摆动进行比较,并且沿减小输出电压摆动与目标电压摆动之间的差的方向调整偏置电流,基于所检测的输出电压摆动来控制偏置电流。在图8的示例中,如上文所讨论的,反馈电路805通过控制电流源晶体管830的栅极电压来控制跨导驱动器110的偏置电流。
83.在图8的示例中,反馈电路805包括峰值检测器810以及耦合在反馈回路808中的控制电路820。峰值检测器810具有耦合到缓冲器105的差分输出的差分输入。峰值检测器810被配置为检测缓冲器105的差分输出处的输出电压摆动,并且基于所检测的输出电压摆动来生成摆动检测信号815。输出电压摆动可以近似等于缓冲器105的正输出处的电压vp与缓冲器105的负输出处的电压vm之间的峰值差。在某些方面中,摆动检测信号815可以为与缓冲器105的输出电压摆动有关(例如,成比例)的电压。
84.控制电路820被配置为从峰值检测器810接收摆动检测信号815,并且基于摆动检测信号815来生成控制信号825。控制信号825输入到跨导驱动器110以控制跨导驱动器110的电流偏置。对于利用电流源晶体管830实现电流源725的示例,控制信号825输入到电流源晶体管830的栅极并且通过控制电流源晶体管830的栅极电压来控制电流源晶体管830的电流。由于电流源晶体管830的电流在第一晶体管160和第二晶体管165处被镜像,控制信号825控制第一晶体管160和第二晶体管165处的偏置电流。
85.在某些方面中,控制电路820通过将摆动检测信号815与对应于目标电压摆动的目标参考信号进行比较来生成控制信号825,并且基于该比较来生成控制信号825。在这些方面中,目标参考信号提供参考点,摆动检测信号815与该参考点进行比较以评估输出电压摆动是高于还是低于目标电压摆动。在一个示例中,当摆动检测信号815近似等于参考目标信号时,输出电压摆动近似等于目标电压摆动。在该示例中,参考目标信号指示当输出电压摆动等于目标电压摆动时摆动检测信号815应当具有的值(例如,电压)。如果摆动检测信号815高于参考目标信号,则输出电压摆动高于目标电压摆动,如果摆动检测信号815低于参考目标信号,则输出电压摆动低于目标电压摆动。在该示例中,控制电路820通过沿减小摆
动检测信号815与目标参考信号之间的差的方向调整跨导驱动器110的偏置电流来将输出电压摆动调整为更接近目标电压摆动。
86.因此,反馈电路805基于输出电压摆动的反馈来调整跨导驱动器110的偏置电流,以保持缓冲器105的输出电压摆动接近目标电压摆动。反馈电路805能够保持输出电压摆动接近跨越pvt拐角的目标电压摆动,从而显著减少跨越pvt拐角的输出电压摆动的变化。减小跨越pvt拐角的摆动变化则减轻了上文参考图1所讨论的过量功耗、信号路径增益变化、lo泄漏增加和/或可靠性问题。进一步地,当缓冲器105放置在lo路径的末端时,反馈电路805能够清除由缓冲器105前方的lo路径中的一个或多个其他设备(例如,放大器、移相器等)引起的摆动变化,如上文所讨论的。
87.缓冲器105的输出电压摆动可以随偏置电流而呈指数增加,从而使得反馈回路808的回路增益急剧发生变化,尤其是在低输出摆动处。结果,与反馈回路208相比较,反馈回路808可能更难以实现良好的回路稳定性,其中经调节的电压235与输出电压摆动之间的近似线性关系提供更好的回路稳定性。
88.图9示出了根据本公开的某些方面的峰值检测器810和控制电路820的示例性实现方式。在图9的示例中,峰值检测器810包括使用图3所示的示例性峰值检测器210实现的峰值检测器905。因而,图3的示例性峰值检测器210的描述适用于图9中的峰值检测器905,因此为了简洁起见,本文中不再赘述。峰值检测器905基于输出电压摆动来在节点322处生成感测电压vsen。如上文所描述的,感测电压vsen与输出电压摆动有关(例如,通过取决于偏置电压vbias的比例)。
89.在该示例中,峰值检测器810还包括运算放大器910和复制电路920。运算放大器910和复制电路920用于减少对感测电压vsen的pvt效应以生成更准确的摆动检测信号815,如下文所进一步讨论的。复制电路920可以通过图4所示的示例复制电路335来实现。然而,在该示例中,第一晶体管410的栅极和第二晶体管415(如图4所示)的栅极耦合到运算放大器910的输出915而非偏置了目标电压vtarget。复制电路920基于运算放大器910的输出电压来生成参考电压vref。应当指出,该示例中的复制电路920不用于设置目标电压摆动。
90.感测电压vsen输入到运算放大器910的负输入,并且参考电压vref输入到运算放大器910的正输入。运算放大器910的输出915提供了上文所讨论的摆动检测信号815。运算放大器910的输出915还耦合到复制电路920的第一晶体管410的栅极和第二晶体管415(如图4所示)的栅极。
91.如上文所讨论的,复制电路920用于抵消由于pvt条件而引起的感测电压vsen的变化。在这点上,复制电路920可以与峰值检测器905集成在同一芯片(即,管芯)上。在一个方面中,复制电路920可以位于与峰值检测器905非常接近的位置,以使复制电路920经受与峰值检测器905近似相同的pvt条件。结果,由于pvt条件而引起的参考电压vref的变化与由于pvt条件而引起的感测电压vsen的变化近似相同。由于运算放大器910在其输入处采用感测电压vsen与参考电压vref的差,所以由于pvt条件而引起的参考电压vref的变化近似抵消了由于pvt条件而引起的感测电压vsen的变化。这减少了对运算放大器910的输出电压915的pvt效应。运算放大器910的输出915提供了上文所讨论的摆动检测信号815,其中使用复制电路920减少了对摆动检测信号815的pvt效应。
92.控制电路820包括控制放大器940(例如,运算放大器)。运算放大器910的输出电压
915输入到控制放大器940的负输入,并且目标电压vtarget输入到控制放大器940的正输入。控制放大器940的输出向跨导驱动器110的电流源725提供控制信号825。在这个示例中,目标电压vtarget对应于上文所讨论的目标参考信号。
93.操作时,控制放大器940沿减小运算放大器910的输出电压915与目标电压vtarget之间的差的方向调整控制信号825(即,将输出电压915调整为更接近于目标电压vtarget)。结果,控制放大器940迫使运算放大器910的输出电压915近似等于目标电压vtarget。这在缓冲器105的输出电压摆动近似等于α*(vtarget
‑
vbias)时发生,其中α为线性系数。结果,反馈电路805调整偏置电流,使得缓冲器105的输出电压摆动近似等于α*(vtarget
‑
vbias)。因此,在该示例中,反馈电路805的目标电压摆动近似等于α*(vtarget
‑
vbias)。
94.因此,对于给定偏置电压vbias,可以通过根据期望目标电压摆动设置输入到控制放大器940的目标电压vtarget来设置目标电压摆动。偏置电压vbias和vtarget可以由图3所示的电压生成器350生成。电压生成器350可以被配置为设置偏置电压vbias和目标电压vtarget的电压电平,使得α*(vtarget
‑
vbias)等于期望目标电压摆动。α可以通过在反馈电路805和缓冲器105上运行模拟和/或执行测量来确定。
95.应当指出,在图9的示例中,参考电压vref用于抵消对感测电压vsen的pvt影响。在图3的示例中,参考电压vref用于设置目标电压摆动和抵消pvt效应。
96.图10示出了根据本公开的某些方面的用于控制缓冲器的输出电压摆动的示例性方法1000。缓冲器(例如缓冲器105)包括变压器(例如变压器120)和驱动器(例如,跨导驱动器110),变压器包括输入电感器(例如输入电感器125)和输出电感器(例如,输出电感器130),输入电感器由驱动器驱动,输入电感器磁性耦合到输出电感器。方法1000可以由反馈电路205执行。
97.在框1010处,在输出电感器处检测输出电压摆动。例如,可以使用峰值检测器(例如,峰值检测器210)来检测输出电压摆动。
98.在框1020处,基于所检测的输出电压摆动来控制输入电感器处的经调节的电压。经调节的电压(例如,经调节的电压235)可以施加到输入电感器的中心抽头。
99.在某些方面中,基于所检测的输出电压摆动来控制经调节的电压可以包括:将所检测的输出电压摆动与目标电压摆动进行比较,并且基于比较来控制经调节的电压。基于比较来控制经调节的电压可以包括:沿减小输出电压摆动与目标电压摆动之间的差的方向调整经调节的电压。
100.根据本公开的方面的缓冲器可以在无线通信设备(例如,无线移动设备、基站、客户驻地设备(cpe)等)中采用以缓冲分配到设备中的混频器的一个或多个lo信号。在某些方面中,无线通信设备(例如,5g设备)包括相控天线阵列,该相控天线阵列允许设备使用波束成形来接收和/或发射具有高方向性的信号以增加范围。在这些方面中,混频器可以用于相控天线阵列的接收器和/或发射器。
101.在这点上,图11示出了被配置为从相控天线阵列中的天线1115
‑
1至1115
‑
n接收信号的接收器1105的示例。在该示例中,接收器1105包括多个接收链1112
‑
1至1112
‑
n,其中接收链1112
‑
1至1112
‑
n中的每个接收链耦合到天线1115
‑
1至1115
‑
n中的相应天线。接收链1112
‑
1至1112
‑
n中的每个接收链包括相应低噪声放大器(lna)1110
‑
1至1110
‑
n和相应混频器1140
‑
1至1140
‑
n。在每个接收链1112
‑
1至1112
‑
n中,相应lna 1110
‑
1至1110
‑
n被配置为
放大来自阵列中相应天线1115
‑
1至1115
‑
n的信号,以及相应混频器1140
‑
1至1140
‑
n被配置为将来自相应lna 1110
‑
1至1110
‑
n的信号与相应lo信号混频以对信号的频率进行下变频。在该示例中,到每个混频器1140
‑
1至1140
‑
n的lo信号在混频之前相移了相应相移,以使用波束成形来设置相控天线阵列的接收方向。对于每个混频器1140
‑
1至1140
‑
n,可以基于相控天线阵列的期望接收方向来设置相应lo信号的相移。应当领会,每个接收链可以包括一个或多个附加部件(未示出)。
102.接收器1105还包括组合器1150和组合接收电路1155。组合器1150被配置为将接收链1112
‑
1至1112
‑
n的输出信号组合成组合信号。组合器1150将组合信号输出到组合接收电路1155,该组合接收电路1155处理组合信号。组合接收电路1155所执行的处理可以包括放大、滤波、模数转换等。组合接收电路1155将经处理的组合信号输出到基带处理器1160,该基带处理器1160可以处理来自组合接收电路1155的信号以从信号中恢复数据。经恢复的数据可以存储在无线通信设备上的存储器中和/或发送到另一处理器(例如,中央处理单元(cpu))以供进一步处理。
103.图12示出了用于向接收链1112
‑
1中的混频器1140
‑
1提供lo信号的lo网络的示例。在该示例中,lo网络包括lo 1210、移相器1220、以及耦合到混频器1140
‑
1的缓冲器105。缓冲器105的输出电压摆动可以使用图2所示的示例性反馈电路205或图8所示的示例性反馈电路805控制。在该示例中,lo 1210耦合到移相器1220,并且移相器1220耦合到缓冲器105的输入。操作时,lo 1210生成lo信号,并且移相器1220基于相控天线阵列的期望接收方向来移位lo信号的相位。缓冲器105从移相器1220接收经相移的lo信号并且基于经相移的lo信号来驱动混频器1140
‑
1。应当领会,lo网络可以在lo 1210与混频器1140
‑
1之间的lo路径中包括一个或多个附加部件(未示出)。
104.应当领会,图11所示的其他混频器1140
‑
2至1140
‑
n中的每个混频器的lo信号可以由类似于图12所示的lo网络的相应lo网络提供。在一个示例中,lo网络可以共享公共lo 1210,其中每个lo网络基于相控天线阵列的期望接收方向来将来自lo 1210的lo信号相移相应相移。
105.图13示出了被配置为从相控天线阵列中的天线1115
‑
1至1115
‑
n接收信号的接收器1305的另一示例。在该示例中,如下文所进一步讨论的,在信号组合之后执行频率转换。在该示例中,接收器1305包括多个接收链1312
‑
1至1312
‑
n,其中接收链1312
‑
1至1312
‑
n中的每个接收链耦合到天线1115
‑
1至1115
‑
n中的相应天线。接收链1312
‑
1至1312
‑
n中的每个接收链包括相应lna 1310
‑
1至1310
‑
n和相应移相器1330
‑
1至1330
‑
n。在每个接收链1312
‑
1至1312
‑
n中,相应lna 1310
‑
1至1310
‑
n被配置为放大来自阵列中相应天线1115
‑
1至1115
‑
n的信号,并且相应移相器1330
‑
1至1330
‑
n被配置为将来自相应lna 1310
‑
1至1310
‑
n的信号的相位移位相应相移。每个移相器1330
‑
1至1330
‑
n的相移可以使用波束成形基于相控天线阵列的期望接收方向来设置。应当领会,每个接收链可以包括一个或多个附加部件(未示出)。
106.接收器1305还包括组合器1350、混频器1340、以及组合接收电路1315。组合器1350被配置为将接收链1312
‑
1至1312
‑
n的输出信号组合成组合信号。组合器1350将组合信号输出到混频器1340。混频器1340将组合信号与lo信号混频以对组合信号的频率进行下变频。混频器1340将经下变频信号输出到组合接收电路1355,该组合接收电路1355处理组合信
号。组合接收电路1355所执行的处理可以包括放大、滤波、模数转换等。组合接收电路1355将组合信号输出到基带处理器1160,该基带处理器1160可以处理来自组合接收电路1355的组合信号以从信号中恢复数据。所恢复的数据可以存储在无线通信设备上的存储器中和/或发送到另一处理器(例如,cpu)以供进一步处理。
107.图14示出了用于向接收器1305中的混频器1340提供lo信号的lo网络的示例。在该示例中,lo网络包括lo 1410以及耦合到混频器1340的缓冲器105。可以使用图2所示的示例性反馈电路205或图8所示的示例性反馈电路805来控制缓冲器105的输出电压摆动。在该示例中,lo 1410耦合到缓冲器105的输入。操作时,lo 1410生成lo信号,该信号输入到缓冲器105的输入。缓冲器105接收lo信号并且基于lo信号来驱动混频器1340。应当领会,lo网络可以在lo 1410与混频器1340之间的lo路径中包括一个或多个附加部件(未示出)。
108.图15示出了根据本公开的方面的用于相控天线阵列的发射器1505的示例。在该示例中,发射器1505包括发射电路1555、分路器1550、以及多个发射链1512
‑
1至1512
‑
n。发射链1512
‑
1至1512
‑
n中的每个发射链具有耦合到分路器1550的输入以及耦合到相控天线阵列中的天线1515
‑
1至1515
‑
n中的相应天线的输出。
109.操作时,基带处理器1560向发射电路1555输出信号。发射电路1555处理所接收的信号以进行发射。发射电路1555所执行的处理可以包括数模转换、放大等。发射电路1555将经处理的信号输出到分路器1550。分路器1550将来自发射电路1555的信号分成多个信号,并且将多个信号中的每个信号输入到发射链1512
‑
1至1512
‑
n中的相应发射链。
110.发射链1512
‑
1至1512
‑
n中的每个发射链包括相应混频器1540
‑
1至1540
‑
n和相应功率放大器(pa)1510
‑
1至1510
‑
n。在每个发射链1512
‑
1至1512
‑
n中,相应混频器1540
‑
1至1540将来自分路器1555的相应信号与相应lo信号混频,并且相应pa 1510
‑
1至1510
‑
n放大来自相应混频器的信号。每个发射链1512
‑
1至1512
‑
n的输出信号馈送到相控天线阵列中的相应天线1515
‑
1至1515
‑
n。在该示例中,到每个混频器1540
‑
1至1540
‑
n的lo信号在混频之前相移了相应相移,以使用波束成形来设置相控天线阵列的发射方向。对于每个混频器1540
‑
1至1540
‑
n,相应lo信号的相移可以基于相控天线阵列的期望发射方向来设置。应当领会,每个接收链可以包括一个或多个附加部件(未示出)。
111.图16示出了用于向发射链1512
‑
1中的混频器1540
‑
1提供lo信号的lo网络的实例。在该示例中,lo网络包括lo 1610、移相器1620、以及耦合到混频器1540
‑
1的缓冲器105。缓冲器105的输出电压摆动可以使用图2所示的示例性反馈电路205或图8所示的示例性反馈电路805来控制。在此示例中,lo 1610耦合到移相器1620,并且移相器1620耦合到缓冲器105的输入。操作时,lo 1610生成lo信号,并且移相器1620基于相控天线阵列的期望发射方向来移位lo信号的相位。缓冲器105从移相器1620接收经相移的lo信号并且基于经相移的lo信号来驱动混频器1540
‑
1。应当领会,lo网络可以在lo 1610与混频器1540
‑
1之间的lo路径中包括一个或多个附加部件(未示出)。
112.应当领会,图15所示的其他混频器1540
‑
2至1540
‑
n中的每个混频器的lo信号可以由类似于图16所示的lo网络的相应lo网络提供。在一个示例中,lo网络可以共享公共lo 1610,其中每个lo网络基于相控天线阵列的期望发射方向来将来自lo 1610的lo信号偏移相应相移。
113.图17示出了根据本公开的各方面的用于相控天线阵列的发射器1705的另一示例。
在该示例中,如下文所进一步讨论的,在信号分离之前执行频率上变频。发射器1505包括发射电路1755、混频器1740、分路器1750、以及多个发射链1712
‑
1至1712
‑
n。发射链1712
‑
1至1712
‑
n中的每个发射链具有耦合到分路器1750的输入以及耦合到相控天线阵列中的天线1515
‑
1至1515
‑
n中的相应天线的输出。
114.操作时,基带处理器1560向发射电路1755输出信号。发射电路1755处理经接收的信号以进行发射。发射电路1755所执行的处理可以包括数模转换、放大等。发射电路1755将经处理的信号输出到混频器1740,该混频器1740将经处理的信号与lo信号混频以对经处理的信号的频率进行上变频。混频器1740将经上变频信号输出到分路器1750。分路器1750将来自混频器1740的信号分成多个信号,并且将多个信号中的每个信号输入到发射链1712
‑
1至1712
‑
n中的相应发射链。
115.发射链1712
‑
1至1712
‑
n中的每个发射链包括相应移相器1730
‑
1至1730
‑
n和相应功率放大器(pa)1710
‑
1至1710
‑
n。在每个发射链1712
‑
1至1712
‑
n中,相应移相器1730
‑
1至1730
‑
n将来自分路器1750的相应信号的相位移位了相应相移,并且相应pa 1710
‑
1至1710
‑
n放大来自相应移相器的信号。每个移相器1730
‑
1至1730
‑
n的相移可以基于相控天线阵列的期望发射方向来设置。每个发射链1712
‑
1至1712
‑
n的输出信号馈送到相控天线阵列中的相应天线1515
‑
1至1515
‑
n。
116.图18示出了用于向发射器1705中的混频器1740提供lo信号的lo网络的示例。在该示例中,lo网络包括lo 1810以及耦合到混频器1740的缓冲器105。可以使用图2所示的示例性反馈电路205或图8所示的示例性反馈电路805来控制缓冲器105。在该示例中,lo 1810耦合到缓冲器105的输入。操作时,lo 1810生成lo信号,该lo信号输入到缓冲器105的输入。缓冲器105接收lo信号并且基于lo信号来驱动混频器1740。应当领会,lo网络可以在lo 1810与混频器1740之间的lo路径中包括一个或多个附加部件(未示出)。
117.上文所讨论的控制电路220和820可以使用通用处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或其他可编程逻辑设备、分立硬件部件(例如,逻辑门)或被设计为执行本文中所描述的功能的其任何组合来实现。处理器可以通过执行包括用于执行功能的代码的软件来执行本文中所描述的功能。软件可以存储在计算机可读存储介质上,诸如ram、rom、eeprom、光盘、和/或磁盘。
118.本文中使用诸如“第一”、“第二”等之类的名称的对元件的任何引用通常不限制那些元件的数量或次序。相反,这些名称在本文中用作区分两个或更多个元件或元件实例的便利方式。因此,对第一元件和第二元件的引用并不意味着只能使用两个元件,或第一元件必须在第二元件之前。
119.在本公开中,词语“示例性”用于意指“用作示例、实例或说明”。本文中被描述为“示例性”的任何实现方式或方面不一定被解释为优于或利于本公开的其他方面。同样,术语“方面”并不要求本公开的所有方面都包括所讨论的特征、优点或操作模式。术语“耦合”在本文中用于是指两个结构之间的直接或间接电耦合。如本文中所使用的,如果两个值(例如,电压)中的一个值在另一值的90%到110%之内,则两个值(例如,电压)“近似”相等。如本文中所使用的,控制经调节的电压235被理解为意味着控制经调节的电压235的电压电平。
120.提供本公开的先前描述以使得本领域技术人员能够制作或使用本公开。对于本领
域技术人员而言,对本公开的各种修改是显而易见的,并且在没有背离本公开的精神或范围的情况下,本文中说定义的一般原理可以应用于其他变化。因此,本公开不旨在限于本文中所描述的示例,而是符合与本文中所公开的原理和新颖特征一致的最宽范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。