技术特征:
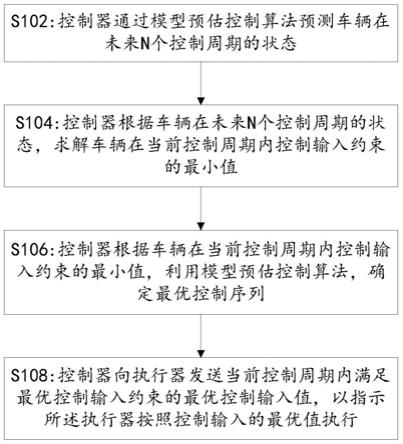
1.一种车辆控制方法,其特征在于,所述方法包括:通过模型预估控制算法预测车辆在未来n个控制周期的状态,所述n为正整数;根据所述车辆在未来n个控制周期的状态,求解所述车辆在当前控制周期内控制输入约束的最小值;根据所述车辆在当前控制周期内控制输入约束的最小值,利用所述模型预估控制算法,确定最优控制序列,所述控制序列包括当前控制周期内满足最优控制输入约束的最优控制输入值;向执行器发送当前控制周期内满足最优控制输入约束的最优控制输入值,以指示所述执行器按照所述控制输入的最优值执行。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:当到达下一控制周期时,再次执行所述通过模型预估控制算法预测车辆在未来n个控制周期的状态,根据所述车辆在未来n个控制周期的状态,求解所述车辆在当前控制周期内控制输入约束的最小值,根据所述车辆在当前控制周期内控制输入约束的最小值,利用所述模型预估控制算法,确定最优控制序列,以及向执行器发送当前控制周期内控制输入的最优值的步骤。3.根据权利要求1所述的方法,其特征在于,所述根据所述车辆在未来n个控制周期的状态,求解所述车辆在当前控制周期内控制输入约束的最小值,包括:根据所述车辆在未来n个控制周期的状态,通过线性规划求解所述车辆在当前控制周期内控制输入约束的最小值。4.根据权利要求1至3任一项所述的方法,其特征在于,所述状态包括所述车辆到车道中心线的距离和/或航向角。5.根据权利要求1至3任一项所述的方法,其特征在于,所述控制输入约束包括加速度约束、方向盘转角约束中的至少一种。6.一种车辆控制装置,其特征在于,所述装置包括:预测模块,用于通过模型预估控制算法预测车辆在未来n个控制周期的状态,所述n为正整数;求解模块,用于根据所述车辆在未来n个控制周期的状态,求解所述车辆在当前控制周期内控制输入约束的最小值;确定模块,用于根据所述车辆在当前控制周期内控制输入约束的最小值,利用所述模型预估控制算法,确定最优控制序列,所述控制序列包括当前控制周期内满足最优控制输入约束的最优控制输入值;发送模块,用于向执行器发送当前控制周期内满足最优控制输入约束的最优控制输入值,以指示所述执行器按照所述控制输入的最优值执行。7.根据权利要求6所述的装置,其特征在于,所述装置还用于:当到达下一控制周期时,再次执行所述通过模型预估控制算法预测车辆在未来n个控制周期的状态,根据所述车辆在未来n个控制周期的状态,求解所述车辆在当前控制周期内控制输入约束的最小值,根据所述车辆在当前控制周期内控制输入约束的最小值,利用所述模型预估控制算法,确定最优控制序列,以及向执行器发送当前控制周期内控制输入的最优值的步骤。
8.根据权利要求6所述的装置,其特征在于,所述预测模块,具体用于:根据所述车辆在未来n个控制周期的状态,通过线性规划求解所述车辆在当前控制周期内控制输入约束的最小值。9.根据权利要求6至8任一项所述的装置,其特征在于,所述状态包括所述车辆到车道中心线的距离和/或航向角。10.根据权利要求6至8任一项所述的装置,其特征在于,所述控制输入约束包括加速度约束、方向盘转角约束中的至少一种。
技术总结
本申请提供了一种车辆控制方法。该方法通过模型预估控制算法预测车辆在未来N个控制周期的状态,求解该车辆在当前控制周期内控制输入约束的最小值,然后确定最优控制序列,其中控制序列包括当前控制周期内满足最优控制输入约束的最优控制输入值,从而向执行器发送最优值,以指示执行器按照控制输入的最优值执行操作。从而,减小控制输入的约束条件范围,减少自动驾驶车辆能量消耗,减小对自动驾驶车辆的状态改变范围,提高自动驾驶的舒适性。提高自动驾驶的舒适性。提高自动驾驶的舒适性。
技术研发人员:何牧 朱俊 阮焱东 谢宁猛 杜芳晶 张彬 滕飞 隋记魁
受保护的技术使用者:上海汽车工业(集团)总公司
技术研发日:2020.11.19
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。