1.本发明涉及钢结构加工设备技术领域,具体是涉及一种钢结构智能制造的抛光除锈设备。
背景技术:
2.中国专利cn202110954548.x公开了一种钢结构生产用智能加工抛光除锈设备;通过夹持装置将h钢夹持固定在工作台上,通过移动装置带动u形块在t形块上滑动,从而带动u形块上的支架移动,通过支架移动带动除锈装置在工作台上进行移动,并在移动过程中通过除锈装置对h钢进行除锈,从而减少人工对h钢表面进行手工除锈处理的工作量,节省了人工的劳动力,减少除锈过程中铁锈对人员的身体造成的伤害,但是设备对于钢结构进行打磨时磨砂轮只能对于钢结构的原料表面进行除锈,不能彻底清除表面锈渍,导致需要人工二次对于剩余的锈渍进行清理,造成效率降低,增加作业人员的负担。
技术实现要素:
3.基于此,有必要针对现有技术问题,提供一种钢结构智能制造的抛光除锈设备。
4.为解决现有技术问题,本发明采用的技术方案为:一种钢结构智能制造的抛光除锈设备,包括移料机构和设置于其上的定位机构和除锈装置,除锈装置包括用于对钢结构工件进行第一次除锈的第一喷砂组件、用于对钢结构工件进行第二次除锈的第二喷砂组件、用于存储第一喷砂组件和第二喷砂组件磨料的原料箱、用于对钢结构工件的表面锈渍进行检测的检测机构、用于对钢结构工件上脱落的锈渍和第一喷砂组件和第二喷砂组件的磨料进行回收的回收机构和两个除锈箱,两个除锈箱并排设置于移料机构上,两个除锈箱上均设置有用于钢结构工件通过的移料门,原料箱位于移料机构的旁侧,原料箱上设置有两个原料管分别与第一喷砂组件和第二喷砂组件连接,第一喷砂组件和第二喷砂组件分别位于两个除锈箱内,检测机构位于第一喷砂组件和第二喷砂组件之间,回收机构位于第一喷砂组件和第二喷砂组件的底部。
5.优选的,第一喷砂组件包括第一管道、若干个支撑杆和若干个第一喷枪,所有支撑杆均呈水平状态固定连接于除锈箱内,所有支撑杆的轴线方向均与移料机构的运输方向平行,且所有支撑杆环绕除锈箱的移料门设置,多个第一喷枪分别套设于所有支撑杆上,第一管道位于所有支撑杆的底部,所有第一喷枪均与第一管道连接,第一管道与原料管连接。
6.优选的,第二喷砂组件设置于若干个机械手和与其数量一一对应的第二喷枪,机械手分布于移料机构的两侧,第二喷枪固定连接于机械手上,第二喷枪上均设置有第二管道,第二管道为波纹管,所有第二管道均与原料管相连接。
7.优选的,检测机构包括检测架和若干个摄像头,检测架位于两个除锈箱之间,检测架上设置有与移料门相互匹配的方槽,所有摄像头均呈环绕方槽固定连接于检测架上。
8.优选的,回收机构包括滤网、支撑网、收集槽、分离筒和两个回收箱,两个回收箱分别位于两个除锈箱的底部,滤网位于第一喷砂组件的下方,滤网呈倾斜状态设置与其中一
个回收箱内,收集槽位于滤网上水平高度较矮的一侧,支撑网呈水平状态位于另一个回收箱的顶部,分离筒分为两个回收箱的旁侧,分离筒上设置有第一回收管,第一回收管与原料箱连接,分离筒的两侧均设置有第二回收管,两个第二回收管分别与两个回收箱连接。
9.优选的,移料机构包括多个移料辊和第一旋转驱动器,所有移料辊均呈水平状态依次沿移料机构的输送方向设置,第一旋转驱动器位于移料辊的下方,移料辊与第一旋转驱动器传动连接,定位机构的数量与移料辊的数量一一对应,所有定位机构均包括用于对钢结构工件进行竖直方向定位的第一定位组件,第一定位组件包括支撑架、直线驱动器、位移板、第一压辊和两个导向杆,支撑架位于移料辊的正上方,两个导向杆均呈竖直状态与支撑架滑动连接,位移板固定连接与两个导向杆的底端,直线驱动器位于支撑架的顶部,直线驱动器的输出轴贯穿通过支撑架与位移板固定连接,第一压辊可转动的连接于位移板的底部,且第一压辊的轴线呈水平状态设置。
10.优选的,定位机构还包括用于对钢结构工件水平方向进行定位的第二定位组件,第二定位组件包括底座、丝杆、第二旋转驱动器、两个位移架和两个第二压辊,底座位于移料辊的旁侧,丝杆呈水平状态转动连接于底座上,丝杆的两端为相反方向的螺纹,第二旋转驱动器位于底座的侧壁上且与丝杆同轴设置,第二旋转驱动器的输出轴贯穿通过底座的侧壁与丝杆固定连接,两个位移架呈竖直状态滑动连接于底座上,丝杆贯穿通过两个位移架的底部且与其螺纹配合,两个位移架呈相对状态设置,两个第二压辊呈竖直状态分别转动连接于两个位移架上。
11.优选的,所有移料门上均设置有柔性材料制成的档条。
12.优选的,两个除锈箱的其中一个侧壁上均设置有观察窗,两个除锈箱的相对侧均设置有用于对第一喷砂组件和第二喷砂组件进行检修的维修门。
13.本技术相比较于现有技术的有益效果是:1.本技术通过第一喷砂组件和第二喷砂组件的设置,减少钢结构表面无法被磨砂轮清除的锈渍,提高除锈的效果,减少返工的时间,提高设备的自动化程度,减少作业人员的负担;通过回收机构的设置,对于第一喷砂组件和第二出喷砂组件工作时产生的废料和锈渍进行回收,减少除锈作业时原料成本的支出,同时通过两个除锈箱和移料门的设置,方便钢结构工件方便从除锈箱上通过,使得除锈过程中的废料和锈渍灰尘不易飘散,保障工作人员的身体健康,防止工作人员吸入灰尘,方便回收机构对于废料和锈渍灰尘进行收集和回收。
14.2.本技术通过检测机构的设置,通过检测机构将剩余留有锈渍的位置信息发送给后端的控制器,通过控制器控制多个机械手对于残留有锈渍的钢结构工件进行除锈,直至钢结构工件表面无残留锈渍,通过机械手设置,可以进一步的提高除锈的精度,可以对于任意角度的顽固的锈渍进行清除,从而减少钢结构除锈作业的返工,提高了效率。
15.3.本技术通过滤网将大块的锈渍从灰尘和磨料中分离开,大块的锈渍会因为重力的作用沿着滤网的顶面流动,最后全部落入收集槽内,通过收集槽对于大块的锈渍进行收集,方便最后通过工作人员对其进行清理;支撑网用于支撑第二喷砂组件,同时方便二次除锈时的灰尘通过支撑网的网孔落入回收箱的底部;分离筒会对回收的灰尘和磨料进行分离,分离后的磨料通过第一回收管通入原料箱内,从而可以循环使用,减少原料成本的支出,分离后的灰尘会被收集,最后被安全排放,从而提高设备的自动化程度和效率,减少对
于工作场所的清理,减轻工作人员的负担。
16.4.本技术通过两个除锈箱的通风管的设置,使得两个除锈箱的内部始终保持正压状态,使得灰尘会向除锈箱的底部移动,方便对于灰尘进行收集和回收。
17.5.本技术通过柔性材料制成的档条的设置,使得钢结构工件通过时,除锈箱的内部的灰尘不会飘散到外部,保障工作人员不会吸入灰尘,影响其健康,同时可以使得除锈箱内为正压状态,使得灰尘位于除锈箱的底部,使其不易飘散,便于对其进行收集和回收。
附图说明
18.图1是本技术的整体的立体结构示意图一;图2是本技术的整体的正视图;图3是本技术的整体的顶视图;图4是本技术的定位机构的立体结构示意图;图5是本技术的定位机构和移料机构的侧视图;图6是本技术的整体的的立体结构示意图二;图7是本技术的除锈箱的立体结构示意图及图中a处的放大图;图8是本技术的除锈箱内部的立体结构示意图;图9是本技术的第一喷砂组件所在的除锈箱的剖面结构示意图;图10是本技术的第二喷砂组件的立体结构示意图;图11是本技术的第二喷砂组件局部的立体结构示意图;图中标号为:1-移料机构;1a-移料辊;1b-第一旋转驱动器;2-定位机构;2a-第一定位组件;2a1-支撑架;2a2-直线驱动器;2a3-位移板;2a4-第一压辊;2a5-导向杆;2b-第二定位组件;2b1-底座;2b2-丝杆;2b3-第二旋转驱动器;2b4-位移架;2b5-第二压辊;3-除锈装置;3a-除锈箱;3a1-移料门;3a2-通风管;3a3-档条;3a4-观察窗;3a5-维修门;3b-第一喷砂组件;3b1-第一管道;3b2-支撑杆;3b3-第一喷枪;3c-第二喷砂组件;3c1-机械手;3c2-第二喷枪;3c3-第二管道;3d-检测机构;3d1-检测架;3d2-摄像头;3e-回收机构;3e1-滤网;3e2-收集槽;3e3-支撑网;3e4-分离筒;3e5-第一回收管;3e6-第二回收管;3e7-回收箱;3f-原料箱;3f1-原料管。
具体实施方式
19.为能进一步了解本发明的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本发明作进一步详细描述。
20.如图1-11所示,本技术提供:一种钢结构智能制造的抛光除锈设备,包括移料机构1和设置于其上的定位机构2和除锈装置3,除锈装置3包括用于对钢结构工件进行第一次除锈的第一喷砂组件3b、用于对钢结构工件进行第二次除锈的第二喷砂组件3c、用于存储第一喷砂组件3b和第二喷砂组件3c磨料的原料箱3f、用于对钢结构工件的表面锈渍进行检测的检测机构3d、用于对钢结构工件上脱落的锈渍和第一喷砂组件3b和第二喷砂组件3c的磨料进行回收的回收机构3e和两个除锈箱3a,两个除锈箱3a并排设置于移料机构1上,两个除
锈箱3a上均设置有用于钢结构工件通过的移料门3a1,原料箱3f位于移料机构1的旁侧,原料箱3f上设置有两个原料管3f1分别与第一喷砂组件3b和第二喷砂组件3c连接,第一喷砂组件3b和第二喷砂组件3c分别位于两个除锈箱3a内,检测机构3d位于第一喷砂组件3b和第二喷砂组件3c之间,回收机构3e位于第一喷砂组件3b和第二喷砂组件3c的底部。
21.基于上述实施例,本技术想要解决的技术问题是设备对于钢结构进行打磨时磨砂轮只能对于钢结构的原料表面进行除锈,不能彻底清除表面锈渍,导致需要人工二次对于剩余的锈渍进行清理,造成效率降低,增加作业人员的负担。为此,本技术将钢结构工件放置于移料机构1上,通过定位机构2对钢结构工件进行定位,使得在移动的过程中不会偏移,便于除锈装置3对其进行除锈,通过移料机构1带动钢结构工件依次通过第一喷砂组件3b和第二喷砂组件3c,通过原料箱3f将磨料通入第一喷砂组件3b和第二喷砂组件3c,通过磨料对于钢结构工件进行除锈,通过第一喷砂组件3b和第二喷砂组件3c的设置,减少钢结构表面无法被磨砂轮清除的锈渍,提高除锈的效果;首先通过第一喷砂组件3b对于钢结构工件上的锈渍清除,再通过检测机构3d对于第一喷砂组件3b上的锈渍进行检测,当钢结构工件表面还剩余有锈渍时,通过第二喷砂组件3c对于锈渍处进行二次除锈,直至被清理干净,当无剩余锈渍时,直接将钢结构工件通过第二喷砂组件3c,通过第一喷砂组件3b和第二喷砂组件3c的设置,提高了除锈的精度和效率,减少返工的时间,提高设备的自动化程度,减少作业人员的负担;通过回收机构3e的设置,对于第一喷砂组件3b和第二出喷砂组件工作时产生的废料和锈渍进行回收,减少除锈作业时原料成本的支出,同时通过两个除锈箱3a和移料门3a1的设置,方便钢结构工件方便从除锈箱3a上通过,使得除锈过程中的废料和锈渍灰尘不易飘散,保障工作人员的身体健康,防止工作人员吸入灰尘,方便回收机构3e对于废料和锈渍灰尘进行收集和回收。
22.如图8和图9所示,进一步的:第一喷砂组件3b包括第一管道3b1、若干个支撑杆3b2和若干个第一喷枪3b3,所有支撑杆3b2均呈水平状态固定连接于除锈箱3a内,所有支撑杆3b2的轴线方向均与移料机构1的运输方向平行,且所有支撑杆3b2环绕除锈箱3a的移料门3a1设置,多个第一喷枪3b3分别套设于所有支撑杆3b2上,第一管道3b1位于所有支撑杆3b2的底部,所有第一喷枪3b3均与第一管道3b1连接,第一管道3b1与原料管3f1连接。
23.基于上述实施例,本技术想要解决的技术问题是如何通过第一喷砂组件3b对于钢结构工件进行除锈。为此,本技术通过原料管3f1将原料箱3f内的磨料通入第一管道3b1内,再通过第一管道3b1将磨料通入各个第一喷枪3b3内,通过第一喷枪3b3对于钢结构工件表面进行除锈,通过磨料将工件表面的锈渍清除,减少磨砂轮无法清除的死角,通过环绕设置于移料门3a1的支撑杆3b2,使得多个第一喷枪3b3对于钢结构工件的表面不会留有死角,提高除锈的效果和效率。
24.如图10和图11所示,进一步的:第二喷砂组件3c设置于若干个机械手3c1和与其数量一一对应的第二喷枪3c2,机械手3c1分布于移料机构1的两侧,第二喷枪3c2固定连接于机械手3c1上,第二喷枪3c2上均设置有第二管道3c3,第二管道3c3为波纹管,所有第二管道3c3均与原料管3f1相连接。
25.基于上述实施例,本技术想要解决的技术问题是如何通过第二喷砂组件3c对于钢结构工件进行除锈。为此,本技术原料管3f1将原料箱3f内的磨料通入第二管道3c3内,再通过第二管道3c3将磨料通入各个第二喷枪3c2内,通过第二喷枪3c2对于钢结构工件表面进
行除锈,通过磨料将工件表面的锈渍清除,减少磨砂轮无法清除的死角,通过检测机构3d的设置,通过检测机构3d将剩余留有锈渍的位置信息发送给后端的控制器,通过控制器控制多个机械手3c1对于残留有锈渍的钢结构工件进行除锈,直至钢结构工件表面无残留锈渍,通过机械手3c1设置,可以进一步的提高除锈的精度,可以对于任意角度的顽固的锈渍进行清除,从而减少钢结构除锈作业的返工,提高了效率。
26.如图7所示,进一步的:检测机构3d包括检测架3d1和若干个摄像头3d2,检测架3d1位于两个除锈箱3a之间,检测架3d1上设置有与移料门3a1相互匹配的方槽,所有摄像头3d2均呈环绕方槽固定连接于检测架3d1上。
27.基于上述实施例,本技术想要解决的技术问题是如何对于第一喷砂组件3b的钢结构工件进行检测。为此,本技术通过检测架3d1固定多个摄像头3d2,当钢结构工件从除锈箱3a的移料门3a1位移至检测架3d1时,其通过移料机构1的带动会通过检测架3d1的方槽,从而通过方槽四周的摄像头3d2对于钢结构工件的表面进行连续拍摄,拍摄的画面传送给后端的控制器,后端的控制器通过分析会得到剩余的锈渍的位置信息,通过第二喷砂组件3c对于钢结构工件表面剩余的休息进行二次除锈,从而减少钢结构除锈作业的返工,提高了效率,提高设备自动化程度。
28.如图3、图6和图8-10所示,进一步的:回收机构3e包括滤网3e1、支撑网3e3、收集槽3e2、分离筒3e4和两个回收箱3e7,两个回收箱3e7分别位于两个除锈箱3a的底部,滤网3e1位于第一喷砂组件3b的下方,滤网3e1呈倾斜状态设置与其中一个回收箱3e7内,收集槽3e2位于滤网3e1上水平高度较矮的一侧,支撑网3e3呈水平状态位于另一个回收箱3e7的顶部,分离筒3e4分为两个回收箱3e7的旁侧,分离筒3e4上设置有第一回收管3e5,第一回收管3e5与原料箱3f连接,分离筒3e4的两侧均设置有第二回收管3e6,两个第二回收管3e6分别与两个回收箱3e7连接。
29.基于上述实施例,本技术想要解决的技术问题是如何对于钢结构工件上脱落的锈渍和第一喷砂组件3b和第二喷砂组件3c的磨料进行回收。为此,本技术通过第一喷砂组件3b对于钢结构工件进行除锈时,会脱落大块的锈渍、灰尘和磨料,滤网3e1用于将大块的锈渍从灰尘和磨料中分离开,由于滤网3e1呈倾斜状态设置,大块的锈渍会因为重力的作用沿着滤网3e1的顶面流动,最后全部落入收集槽3e2内,通过收集槽3e2对于大块的锈渍进行收集,方便最后通过工作人员对其进行清理,而灰尘和磨料会通过滤网3e1的网孔落入回收箱3e7内,通过第二回收管3e6被分离筒3e4回收;支撑网3e3用于支撑第二喷砂组件3c,同时方便二次除锈时的灰尘通过支撑网3e3的网孔落入回收箱3e7的底部,通过第二回收管3e6被分离筒3e4回收;分离筒3e4会对回收的灰尘和磨料进行分离,分离后的磨料通过第一回收管3e5通入原料箱3f内,从而可以循环使用,减少原料成本的支出,分离后的灰尘会被收集,最后被安全排放,从而提高设备的自动化程度和效率,减少对于工作场所的清理,减轻工作人员的负担。
30.如图3、图6和图9所示,进一步的:两个除锈箱3a的顶部设置有与外部气源连接的通风管3a2,通风管3a2使得除锈箱3a内部为正压状态。
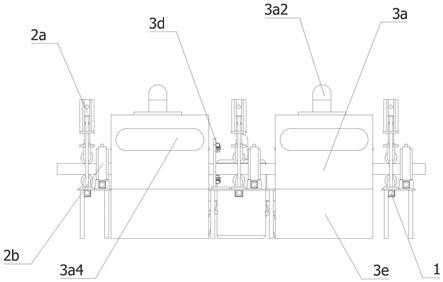
31.基于上述实施例,本技术想要解决的技术问题是如何防止第一喷砂组件3b和第二喷砂组件3c除锈工作时的灰尘飘散。为此,本技术通过两个除锈箱3a的通风管3a2的设置,使得两个除锈箱3a的内部始终保持正压状态,使得灰尘会向除锈箱3a的底部移动,方便对
于灰尘进行收集和回收。
32.如图5所示,进一步的:移料机构1包括多个移料辊1a和第一旋转驱动器1b,所有移料辊1a均呈水平状态依次沿移料机构1的输送方向设置,第一旋转驱动器1b位于移料辊1a的下方,移料辊1a与第一旋转驱动器1b传动连接,定位机构2的数量与移料辊1a的数量一一对应,所有定位机构2均包括用于对钢结构工件进行竖直方向定位的第一定位组件2a,第一定位组件2a包括支撑架2a1、直线驱动器2a2、位移板2a3、第一压辊2a4和两个导向杆2a5,支撑架2a1位于移料辊1a的正上方,两个导向杆2a5均呈竖直状态与支撑架2a1滑动连接,位移板2a3固定连接与两个导向杆2a5的底端,直线驱动器2a2位于支撑架2a1的顶部,直线驱动器2a2的输出轴贯穿通过支撑架2a1与位移板2a3固定连接,第一压辊2a4可转动的连接于位移板2a3的底部,且第一压辊2a4的轴线呈水平状态设置。
33.基于上述实施例,本技术想要解决的技术问题是如何通过第一定位组件2a对于钢结构工件进行定位。为此,本技术将钢结构工件放置于移料辊1a上,通过第一旋转驱动器1b带动与其传动连接的移料辊1a的转动,钢结构工件随着移料辊1a的转动方向进行位移,此时通过启动直线驱动器2a2,直线驱动器2a2的输出轴带动与其固定连接的位移板2a3,位移板2a3的移动带动了两个导向杆2a5的移动,使得位移板2a3沿两个导向杆2a5的轴线方向进行移动,从而带动了位移板2a3上第一压辊2a4的移动,使得第一压辊2a4向钢结构工件的上方靠近,直至其与钢结构工件的表面抵接,从而将钢结构工件固定于移料辊1a和第一压辊2a4之间,由于第一压辊2a4转动连接于位移板2a3上,使得钢结构工件被定位的同时依然可以被移料辊1a带动转动,为了防止第一压辊2a4的损坏,位移板2a3上可设置传感器,使得操作更加的精准,延长设备的使用寿命。
34.如图4和图5所示,进一步的:定位机构2还包括用于对钢结构工件水平方向进行定位的第二定位组件2b,第二定位组件2b包括底座2b1、丝杆2b2、第二旋转驱动器2b3、两个位移架2b4和两个第二压辊2b5,底座2b1位于移料辊1a的旁侧,丝杆2b2呈水平状态转动连接于底座2b1上,丝杆2b2的两端为相反方向的螺纹,第二旋转驱动器2b3位于底座2b1的侧壁上且与丝杆2b2同轴设置,第二旋转驱动器2b3的输出轴贯穿通过底座2b1的侧壁与丝杆2b2固定连接,两个位移架2b4呈竖直状态滑动连接于底座2b1上,丝杆2b2贯穿通过两个位移架2b4的底部且与其螺纹配合,两个位移架2b4呈相对状态设置,两个第二压辊2b5呈竖直状态分别转动连接于两个位移架2b4上。
35.基于上述实施例,本技术想要解决的技术问题是钢结构工件被第一定位组件2a定位后,但是其在传输时可能发生水平方向的方向的偏移,如何通过第二定位组件2b对于钢结构工件的水平方向进行定位。为此,本技术钢结构工件通过第一定位组件2a后,通过启动第二旋转驱动器2b3,第二旋转驱动器2b3的输出轴的转动带动了与其固定连接的丝杆2b2的转动,丝杆2b2的转动带动了两个与其螺纹配合的位移架2b4的移动,由于丝杆2b2的两端为相反方向的螺纹,使得两个位移架2b4在底座2b1上向相对侧进行滑动,通过位移架2b4的移动带动了两个第二压辊2b5相互靠近,直至两个第二压辊2b5与钢结构的两侧进行抵接,由于两个第二压辊2b5与位移架2b4转动连接,使得钢结构工件被定位的同时,不会影响其移动,使得钢结构工件在位移的同时不会发生偏移,便于后续对于其的除锈操作,为了防止第二压辊2b5的损坏,位移架2b4上可设置传感器,使得位移架2b4的夹持更加的精准,延长设备的使用寿命。
36.如图7所示,进一步的:所有移料门3a1上均设置有柔性材料制成的档条3a3。
37.基于上述实施例,本技术想要解决的技术问题是在如何方便对于除锈的过程中会产生大量的灰尘进行收集。为此,本技术通过柔性材料制成的档条3a3的设置,使得钢结构工件通过时,除锈箱3a的内部的灰尘不会飘散到外部,保障工作人员不会吸入灰尘,影响其健康,同时可以使得除锈箱3a内为正压状态,使得灰尘位于除锈箱3a的底部,使其不易飘散,便于对其进行收集和回收。
38.如图2和图6所示,进一步的:两个除锈箱3a的其中一个侧壁上均设置有观察窗3a4,两个除锈箱3a的相对侧均设置有用于对第一喷砂组件3b和第二喷砂组件3c进行检修的维修门3a5。
39.基于上述实施例,本技术想要解决的技术问题是如何方便对于第一喷砂组件3b和第二喷砂组件3c的工作状况进行调整和观测。为此,本技术通过观察窗3a4的设置,使得工作人员在外部就可以对于除锈箱3a的内部进行观测,方便对于第一喷砂组件3b和第二喷砂组件3c进行调整,通过维修门3a5的设置,方便对于第一喷砂组件3b和第二喷砂组件3c进行调整,方便对于其维修和检测。
40.以上实施例仅表达了本发明的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。