1.本实用新型涉及工业机器人领域,具体涉及一种用于工业机器人的遥控装置。
背景技术:
2.在当今社会,人力成本越来越高,机械臂取代人工的趋势愈加明显,高空施工作业作为高危行业从业人员越来越少。但由于工程工艺要求,钢结构厂房、高层建筑等表面均需要喷涂涂料,有些工艺需要进行打磨、修复、检测等作业。
3.现有方案主要是利用操作人员工施工作业,操作人员需要上到高空作业车,然后将操作人员举升到最高超过40米的地方进行施工作业,操作人员距离作业面还要在30mm以内,对于操作人员来说,十分危险,并且对健康影响很大,长时间作业很容易疲劳,更容易发生危险。目前类似工种的操作人员工成本也是特别高,很多操作人员已经选择不再从事此类行业,是绝对的高危行业。
4.为了解决上述问题,亟需发明一种用于工业机器人的遥控装置,针对现有喷涂、检测、修复等高空施工作业,需要大量的操作人员力,且费工费时,充满危险性,解决了高空施工作业难度大,不安全等问题。
技术实现要素:
5.本实用新型的目的在于提供一种用于工业机器人的遥控装置,具备实时随动控制功能,操作时实时提供阻尼力的反馈,模仿人体工程学设计的结构操作灵活轻便,随身穿戴便于移动,功能性强大可以完全满足施工作业要求等特征。填补了能够完全模拟现场施工姿态,控制高空机械臂遥控装置的空白,有效的解决了高空施工作业难度大,不安全等问题。
6.为达到上述目的,本实用新型采用的技术方案如下:
7.一种用于工业机器人的遥控装置,包括通过无线模块与机械臂通讯的遥控臂,所述遥控臂包括遥控臂控制盒、遥控臂本体和穿戴服;
8.所述遥控臂本体通过遥控臂基座设置在遥控臂控制盒上,所述遥控臂控制盒通过连接板设置在穿戴服的下部。
9.进一步的,所述遥控臂本体包括关节一、关节二、关节三、关节四、水平握把、垂直握把、扣动扳机和喷涂开关。
10.进一步的,所述遥控臂控制盒包括控制盒外壳、急停按钮、使能按钮、关节五旋钮、关节六旋钮和关节七旋钮。
11.进一步的,所述控制盒外壳设置遥控臂安装孔,并且所述遥控臂基座设置在遥控臂安装孔上,所述遥控臂基座为中空结构。
12.进一步的,所述关节一、关节二、关节三和关节四均是阻尼关节。
13.进一步的,所述阻尼关节包括可调弹性球形阻尼、阻尼轨道、关节臂连接件、角度传感器组件和关节臂三通连接件。
阻尼轨道;403-关节臂连接件;404-角度传感器组件;405-关节臂三通连接件。
具体实施方式
31.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型作进一步详细说明。
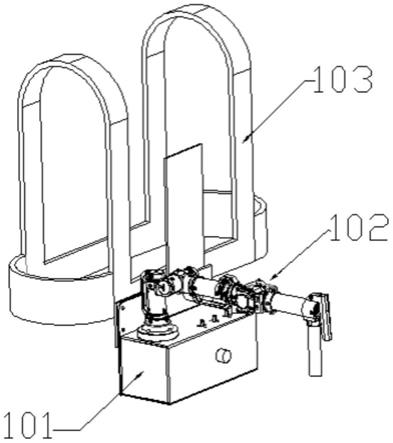
32.如图1~8所示,本实用新型一种用于工业机器人的遥控装置,包括通过无线模块与机械臂2通讯的遥控臂1,所述遥控臂1包括遥控臂控制盒101、遥控臂本体102和穿戴服103;
33.所述遥控臂本体102通过遥控臂基座201设置在遥控臂控制盒101上,所述遥控臂控制盒101通过连接板104设置在穿戴服103的下部;
34.并且遥控臂底座位置可根据身高进行高低调节,遥控臂的长度,在遥控臂伸直情况下仍可以让操作人员屈臂进行作业,这个姿态工作,可以让操作人员不会感到疲劳,完全可以在比较轻松的姿态下完成施工作业工作。
35.进一步的,所述遥控臂本体102包括关节一202、关节二203、关节三204、关节四205、水平握把206、垂直握把207、扣动扳机208和喷涂开关209。
36.进一步的,所述遥控臂控制盒101包括控制盒外壳301、急停按钮302、使能按钮303、关节五旋钮304、关节六旋钮305和关节七旋钮306。
37.进一步的,所述控制盒外壳301设置遥控臂安装孔307,并且所述遥控臂基座201设置在遥控臂安装孔307上,所述遥控臂基座201为中空结构。
38.进一步的,所述关节一202、关节二203、关节三204和关节四205均是阻尼关节。
39.进一步的,所述阻尼关节包括可调弹性球形阻尼401、阻尼轨道402、关节臂连接件403、角度传感器组件404和关节臂三通连接件405。
40.遥控臂每个运动关节都包含有特制可调阻尼器,根据关节不同,阻尼大小设置不一样,可以让操作人员在操作的时候可以感受到有力的反馈,更符合实际现场操作的手感,同时可减少误操作对机械臂带来的冲击。
41.遥控臂各个关节均装有角度传感器,可通过操作人员手臂运动带动操作遥控臂,并通过通信实时将遥控臂各关节的角度和速度信息传递给机械臂控制器,控制器通过滤波重构与再规划等处理手段对上述的角度、速度信息进行再现,使高空机械臂可实时重现地面遥控臂的一系列动作,实现对高空机械臂遥控操作的目的。
42.进一步的,所述遥控臂控制盒101内部设置机械臂控制器,所述关节一202、关节二203、关节三204、关节四205、水平握把206、垂直握把207、扣动扳机208和喷涂开关209以及急停按钮302、使能按钮303、关节五旋钮304、关节六旋钮305和关节七旋钮306均电性连接机械臂控制器。
43.进一步的,所述穿戴服103为轻量化材料穿戴服,优选的,所述轻量化材料穿戴服为碳纤维、铝合金或者碳纤维和铝合金混合结构;所述遥控臂控制盒101和遥控臂本体102均采用碳纤维或者铝合金结构;
44.遥控臂设计时考虑满足使用强度的情况下进行轻量化设计,因为是穿戴装备,尽量减轻本体重量,设计了主要以轻量化材料为主的结构,使用材质主要以碳纤维及铝合金为主,所有的连接臂都采用碳纤维,关节、连接件则采用了铝合金。
45.本实施例的遥控方法是:首先将穿戴服103穿上,调整好背心高度和松紧度,后将遥控臂控制盒101与机械臂2通过无线传输通信连接,并开启遥控臂控制模式。
46.此时打开遥控臂控制盒101上的使能旋钮303。打开后可以开始操控遥控臂本体102对机械臂2进行遥控。遥控臂本体每个关节(即关节一202、关节二203、关节三204和关节四205)对应了机械臂相对应的关节,向左转动遥控臂1关节一202,机械臂1关节也同样向左旋转。以此类推其它关节控制原理是一样的。在每个关节内部安装有相对应的特制可调弹性球形阻尼401,转动时,可调弹性球形阻尼在阻尼轨道上滚动,与阻尼轨道402之间的阻力提供阻尼力效果。可针对每个关节受力不同进行调节阻尼力的大小,每个关节位置不同,设置的阻尼力也不一样,在操作时可以给予实时力的反馈,操作更稳定,更符合实际施工状态,不操作时,可以避免遥控臂随意震动而导致误操作,在直臂状态下也可以将其关节轻微锁住,关节不会自己转动。
47.关节臂连接件403内部设计有暗孔,在结构内部,方便走线时可从暗孔中穿过,避免线路外露,影响操作者。
48.正常使用时,可以握住垂直握把207,扣压扳机208可打开喷涂开关209,则机械臂开始作业,松开扳机,扳机自动回弹,则机械臂停止作业。另外一个姿态是可以使用水平握把206,先将扣压扳机抬起,直接用食指按动喷涂开关,按下去后,机械臂开始作业,松开则停止作业。此方式来控制,适合机械臂面对天花板部分的施工。遥控臂控制手柄采用两种姿态设计,在喷涂、探测、修复作业环境下,可手握垂直把手,进行类似手枪扣动扳机开关的姿态进行作业。另一个姿态可以将扳机掀开,直接用手握住直臂部分进行作业,两种姿态在施工作业时,分别可以适用于立面作业和天花面作业姿态,可以让操作操作人员员长时间工作情况下减少因为姿态问题产生的疲劳感。
49.多关节操作时,关节一202、关节二203、关节三204、关节四205,在遥控臂部分操作,关节五旋钮304、关节六旋钮305和关节七旋钮306在控制盒上用左手操作,此设计可以让左右手协调工作,满足多关节机械臂的控制,避免因为关节都放在遥控臂上,关节会自己转动的问题。
50.当然,本实用新型还可有其它多种实施方式,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。