1.本实用新型涉及自动化设备技术领域,尤其涉及一种机器人抓手。
背景技术:
2.在自动化生物实验室中,机器人需要拾取不同种类的耗材,操作各种仪器和设备。针对不同的仪器和设备,现有的方法是设置各种抓手来适应各种不同的仪器和设备。比如通过试管夹来抓到细管径的试管、滴液器等器件,通过多抓爪头来抓到大口径的培养瓶、瓶盖和一些器皿,通过水平双爪来抓到孔板等器材。
3.但是在自动化实验中,要频繁抓取不同类型的耗材,就要更换不同的抓手来应对不同的器材类型,这种过程不仅耗时,而且增加自动化控制步骤,增加出错概率,而且会增加设备的结构复杂度,增加产品成本。
技术实现要素:
4.本实用新型的目的是为了解决上述问题,提供一种机器人抓手,实现一个抓手应对不同耗材的抓取,减少更换抓手次数,提高工作效率。
5.本实用新型采取的技术方案是:
6.一种机器人抓手,其特征是,包括驱动头和驱动头下方设置的夹爪,所述夹爪包括对称设置的两个手指,所述驱动头驱动夹爪的两个手指做开合动作,所述手指包括水平设置的上杆和上杆两端垂直向下设置的前杆和后杆,所述上杆通过连接块连接至驱动头,所述上杆向外侧折弯成z字形,使所述前杆位于后杆的外侧。
7.进一步,所述前杆的下端内侧对称设置垫块。
8.进一步,所述后杆的下端内侧对称设置v形弹性块。
9.进一步,所述前杆的下端向前侧或后侧折弯90度形成前短杆。
10.进一步,所述前短杆内侧对称设置垫块。
11.进一步,所述驱动头上对称设置两个双连杆机构,每个双连杆机构驱动对应侧的手指平移,所述双连杆机构包括上固定杆、下活动杆和两根连杆,两根连杆分别铰接至上固定杆和下活动杆上,下活动杆连接所述连接块形成腕部,所述下活动杆上连接气动活塞,驱动下固定杆水平位移。
12.进一步,在驱动头的一侧设置摄像头,所述摄像头位于所述抓手的正上方。
13.进一步,在所述腕部设置三维力传感器和扭矩传感器。
14.进一步,所述前杆和后杆之间的间距为6至10cm,所述上杆向外侧折弯的长度为10至15mm。
15.进一步,所述前杆的下端低于后杆的下端。
16.本实用新型的有益效果是:
17.(1)结构简单,控制方便;
18.(2)行程范围大,不仅可以抓到试管、培养瓶等小径容器,还可以轻松抓到不同尺
寸的微孔板;
19.(3)配合摄像头还可以直接对抓取耗材进行二维码扫描,以及对抓到状态进行视觉评估;
20.(4)通过传感器的配置,实现抓取力调节,减少设备耗材损坏风险。
附图说明
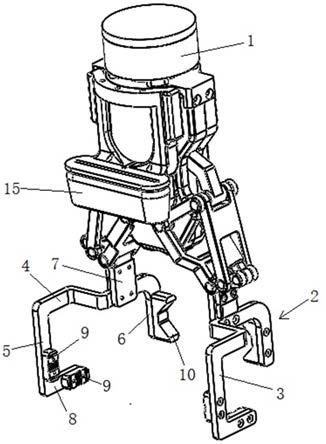
21.附图1是本实用新型的整体结构示意图;
22.附图2是连杆结构的局部放大示意图;
23.附图3是机器人抓手的一种工作状态示意图;
24.附图4是机器人抓手的另一种工作状态示意图。
25.附图中的标号分别为:
26.1.驱动头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.夹爪;
27.3.手指;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4.上杆;
28.5.前杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.后杆;
29.7.连接块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.前短杆;
30.9.垫块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10.弹性块;
31.11.上固定杆;
ꢀꢀꢀꢀꢀꢀ
12.下活动杆;
32.13.连杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14.气动活塞;
33.15.摄像头。
具体实施方式
34.下面结合附图对本实用新型机器人抓手的具体实施方式作详细说明。
35.参见附图1,机器人抓手包括驱动头1和驱动头1下方设置的夹爪2,夹爪2包括对称设置的两个手指3,驱动头1驱动夹爪2的两个手指3做开合动作。开合动作使夹爪2实现对耗材器件的取放。将机器人抓手设置于机械手末端,实现实验室操作自动化。
36.手指3包括水平设置的上杆4和上杆4两端垂直向下设置的前杆5和后杆6,上杆4通过连接块7连接至驱动头1,上杆4向外侧折弯成z字形,使前杆5位于后杆6的外侧。连接块7的位置可设置在上杆4靠近后杆6的位置。前杆5的下端向前侧或后侧折弯90度形成前短杆8。在前杆5的下端内侧以及前短杆8的内侧均对称设置垫块9,在后杆6的下端内侧对称设置v形弹性块10。
37.手指3的各杆均可使用扁平钢材或铝材,垫块9和弹性块10沿各杆的长度方向设置,垫块9和弹性块10可选用硅胶材质。
38.根据生物实验室耗材的应用情况,将前杆5和后杆6之间的间距设置为6至10cm,上杆4向外侧折弯的长度为10至15mm。前杆5的下端低于后杆6的下端,方便抓取较长器件。
39.参见附图2,机器人抓手可通过电动或气动驱动动力实现对耗材的取放操作。本专利中使用气动活塞14杆实现。驱动头1上对称设置两个双连杆13机构,每个双连杆13机构驱动对应侧的手指3平移,双连杆13机构包括上固定杆11、下活动杆12和两根连杆13,两根连杆13分别铰接至上固定杆11和下活动杆12上,下活动杆12连接连接块7形成腕部,下活动杆12上连接气动活塞14,驱动下固定杆水平位移。气动活塞14顶出时,将手指3向两侧张开,气
动活塞14收回时,将手指3回拢。
40.另外,在驱动头1的一侧设置摄像头15,摄像头15位于抓手的正上方。摄像头15通过控制系统,实现条形码和二维码读取功能,还可以通过视觉处理,帮助定位和自动调整位置偏差。
41.在下活动杆12连接连接块7的腕部位置,设置三维力传感器和扭矩传感器。使抓手可以感知施加到末端执行器上的力和扭矩。这将大大提高你的机器人的灵巧度,通过增加力控制功能,机器人可以在执行任务时检测到意外故障。此外,当发生意外碰撞时,机器人能够快速做出反应,这将大大降低实验室设备损坏的风险。
42.参见附图3,机器人抓手水平状态工作,手指3的后杆6位于下方,这种状态适用于抓取试管类器件。驱动气动活塞14伸出,使手指3向外张开,移动抓手至试管位置,驱动活塞杆收回,后杆6上的弹性块10向试管靠近后将试管夹持,进行相应的实验操作,完成后,气动活塞14伸出,将试管释放。
43.参见附图4,机器人抓手水平状态工作,手指3的前杆5位于下方,这种状态适用于抓取孔板类器件,将孔板进行水平位移或推入推出孔板架。驱动气动活塞14伸出,使手指3向外张开,移动抓手至孔板位置,驱动活塞杆收回,前杆5上的垫块9向孔板的侧边靠近后将孔板夹持,进行相应的实验操作,完成后,气动活塞14伸出,将孔板释放。
44.对于一般孔板,抓手可以对孔板的长度侧边进行夹持,对于微孔板,还可以夹持其宽度边。
45.参见附图1,机器人抓手在竖直状态工作,手指3的下方前短杆8处于工作位置,这种状态适用于抓取孔板类器件,将孔板进行上下位移操作为主。驱动气动活塞14伸出,使手指3向外张开,移动抓手至孔板位置,驱动活塞杆收回,前短杆8上的垫块9向孔板的侧边靠近后将孔板夹持,进行相应的实验操作,完成后,气动活塞14伸出,将孔板释放。
46.以上仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。