技术特征:
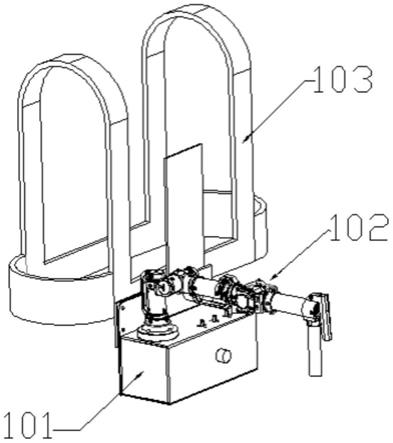
1.一种用于工业机器人的遥控装置,其特征在于:包括通过无线模块与机械臂(2)通讯的遥控臂(1),所述遥控臂(1)包括遥控臂控制盒(101)、遥控臂本体(102)和穿戴服(103);所述遥控臂本体(102)通过遥控臂基座(201)设置在遥控臂控制盒(101)上,所述遥控臂控制盒(101)通过连接板(104)设置在穿戴服(103)的下部。2.根据权利要求1所述的一种用于工业机器人的遥控装置,其特征在于:所述遥控臂本体(102)包括关节一(202)、关节二(203)、关节三(204)、关节四(205)、水平握把(206)、垂直握把(207)、扣动扳机(208)和喷涂开关(209)。3.根据权利要求2所述的一种用于工业机器人的遥控装置,其特征在于:所述遥控臂控制盒(101)包括控制盒外壳(301)、急停按钮(302)、使能按钮(303)、关节五旋钮(304)、关节六旋钮(305)和关节七旋钮(306)。4.根据权利要求3所述的一种用于工业机器人的遥控装置,其特征在于:所述控制盒外壳(301)设置遥控臂安装孔(307),并且所述遥控臂基座(201)设置在遥控臂安装孔(307)上,所述遥控臂基座(201)为中空结构。5.根据权利要求2所述的一种用于工业机器人的遥控装置,其特征在于:所述关节一(202)、关节二(203)、关节三(204)和关节四(205)均是阻尼关节。6.根据权利要求5所述的一种用于工业机器人的遥控装置,其特征在于:所述阻尼关节包括可调弹性球形阻尼(401)、阻尼轨道(402)、关节臂连接件(403)、角度传感器组件(404)和关节臂三通连接件(405)。7.根据权利要求4所述的一种用于工业机器人的遥控装置,其特征在于:所述遥控臂控制盒(101)内部设置机械臂控制器,所述关节一(202)、关节二(203)、关节三(204)、关节四(205)、水平握把(206)、垂直握把(207)、扣动扳机(208)和喷涂开关(209)以及急停按钮(302)、使能按钮(303)、关节五旋钮(304)、关节六旋钮(305)和关节七旋钮(306)均电性连接机械臂控制器。8.根据权利要求1所述的一种用于工业机器人的遥控装置,其特征在于:所述穿戴服(103)为轻量化材料穿戴服。9.根据权利要求8所述的一种用于工业机器人的遥控装置,其特征在于:所述轻量化材料穿戴服为碳纤维、铝合金或者碳纤维和铝合金混合结构。10.根据权利要求1所述的一种用于工业机器人的遥控装置,其特征在于:所述遥控臂控制盒(101)和遥控臂本体(102)均采用碳纤维或者铝合金结构。
技术总结
本实用新型公开了一种用于工业机器人的遥控装置,包括通过无线模块与机械臂通讯的遥控臂,所述遥控臂包括遥控臂控制盒、遥控臂本体和穿戴服;所述遥控臂本体通过遥控臂基座设置在遥控臂控制盒上,所述遥控臂控制盒通过连接板设置在穿戴服的下部。本实用新型提供的用于工业机器人的遥控装置,具有远程通信控制功能,可根据操作人员实时的动作让机械臂实时随动,大大降低了机械臂的使用难度;同时可以适应工地的操作人员对于施工作业的控制需求,并且可以远离施工区域,减少涂料、灰尘等对操作人员体的伤害,此装置结构简单,重量轻便,可适应操作人员的穿戴要求,操作人员在地面就可完成高空的施工任务,长时间作业也不会感到疲劳。劳。劳。
技术研发人员:高玉涛 孙是 胡永强 尹晓峰 黄世龙 贾文博 刘忠信 宋晓禹 宋安福
受保护的技术使用者:北京克莱明科技有限公司
技术研发日:2021.12.17
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。