1.本发明属于光学检测相关技术领域,更具体地,涉及一种光刻缺陷衍射光强差分检测方法。
背景技术:
2.随着波长13.5nm的极紫外(extreme ultra-violet,euv)光刻技术的量产应用,集成电路制造关键尺寸(cd)突破至7nm技术节点及以下,进一步逼近摩尔定律的极限。光刻掩模作为光刻工艺重要信息载体,其表面承载着芯片设计电路图形,经由光刻、刻蚀等工艺转移到硅片上。光刻掩模上的缺陷会经由光刻工艺批量复制到所有硅片中,而且光刻掩模的微小缺陷往往会导致硅片上更大范围的缺陷,进而大幅影响生产质量和良率。随着光刻工艺进入euv光刻时代,采用反射式光刻曝光工艺,euv光刻掩模结构复杂度及光刻图形复杂度要远高于传统透射式光刻掩模。加之硅片上的电路图形对应掩模等比缩小四倍,硅片上的集成电路cd特征尺寸已突破至10nm以下。
3.现有的euv光刻缺陷检测通常是沿用传统光场显微透镜成像检测技术,检测灵敏度受限于光源波长和成像透镜的数值孔径(na),其缺陷散射信号在cd趋近于7nm时已经完全丧失了灵敏度,导致检测范围受限及检测效率低。针对euv光刻工艺的晶圆和掩模等光刻缺陷检测需求,传统广场显微镜成像技术已不再适用。近年以来,lasertech公司的apmi(actinic patterned mask defect inspection)基于euv光源结合高倍率光场成像技术,是现有唯一具备euv光刻掩模原波长缺陷检测的商用方案,但受限于euv多层膜反射镜制造工艺复杂度,其数值孔径na无法进一步提高,对于40nm以下的缺陷几乎丧失了灵敏度。扫描电子显微镜(sem)具备较高的成像分辨率,是为数不多的重要检测方案,但受限于其检测工艺复杂度高,检测效率低,且对样品有损伤,应用场景仅限于离线抽检,无法满足光刻工艺在线快速、有效、无损检测需求。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一种光刻缺陷衍射光强差分检测方法,其利用衍射光强差分算法对待测样品的衍射光强信息进行处理以实现待测样品高精度缺陷识别与定位,由此解决了现有光刻缺陷检测技术检测范围受限及检测效率低的技术问题。
5.为实现上述目的,按照本发明的一个方面,提供了一种光刻缺陷衍射光强差分检测方法,所述方法主要包括以下步骤:
6.(1)构造入射照明矩阵p(m,n,u0)以用于照明探针叠层,扫描入射待测含缺陷光刻样品o(x,y),获得待测含缺陷样品的近场电场分布u(ξ,η);
7.(2)通过菲涅尔远场衍射获得待测含缺陷光刻样品的远场衍射光强分布i(x,y)矩阵;
8.(3)基于含缺陷光刻样品远场衍射光强分布i(x,y)矩阵及无缺陷标准样品远场衍
射光强分布i
*
(x,y)求解远场衍射光强差分δi(x,y);
9.(4)对得到的远场衍射光强差分δi(x,y)进行灵敏度响应分析,并基于得到的灵敏度响应分析结果进行缺陷位置求解;
10.(5)重复步骤(1)-步骤(4)直至整个待测光刻样品被完整扫描检测完毕,并输出所有检出的缺陷位置矩阵m
xy
。
11.进一步地,步骤(1)之前包括确定检测工艺参数的步骤,检测工艺参数包括光源波长、入射照明探针光场分布及入射角。
12.进一步地,采用的探针的直径d
p
值为5μm,相邻照明探针交叠比例为50%~70%;光源波长λ=13.5nm。
13.进一步地,待测含缺陷样品的近场电场分布u(ξ,η)为:
14.u(ξ,η)=γ{p(m,n,u0),o(x,y)}
[0015][0016]
其中,lx、ly为待测光刻样品尺寸,d
p
表示入射照明探针光斑直径,overlap表示相邻探针重叠比例,m,n为照明探针扫描位置矩阵,γ{p(m,n,u0),o(x,y)}表示入射照明在(m,n)位置处以相干波前u0入射到待测光刻样品o(x,y)后所求的出射电场分布函数。
[0017]
进一步地,入射照明矩阵p(m,n,u0)为3维矩阵,m,n代表照明探针数量及位置分布坐标,即照明探针沿待测光刻样品x,y方向分别分布m行n列照明探针位置坐标,u0为每组照明探针光场分布矩阵。
[0018]
进一步地,远场衍射光强分布i(x,y)矩阵为:
[0019][0020]
其中,含缺陷光刻样品远场衍射光强i(x,y)为近场电场分布矩阵u(ξ,η)菲涅尔衍射积分的电场平方;λ为照明波长;z为远场探测器与待测光刻样品之间距离。
[0021]
进一步地,步骤(2)中,采用的衍射系统菲涅尔数nf小于0.1。
[0022]
进一步地,远场衍射光强差分δi(x,y)的计算公式为:δi(x,y)=|i(x,y)-i
*
(x,y)|。
[0023]
进一步地,通过截取邻近衍射差分响应下照明探针交叠区域照明探针中心坐标以对(xi,yi)衍射差分响应δi(i)
uniform
极值进行加权归一化,进而对缺陷精确位置(x,y)进行近似求解,所采用的公式为:
[0024][0025][0026]
其中,k为所检测缺陷位置临近区域重叠照明探针数量,max(δi(i)
uniform
)为k组衍射差分光强矩阵归一化后分别对其求极值,其范围在(0,1)之间。
[0027]
进一步地,差分信号交叠区域l(x,y)的计算公式为:
[0028][0029]
其中,∩{∑
m,n
p
singal(m,n)
}表示为衍射差分信号响应对应所有入射照明探针位置交集;∪{∑
m,n
p
noise(m,n)
}表示为衍射差分丢失信噪比对应所有入射照明探针位置并集。
[0030]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的光刻缺陷衍射光强差分检测方法主要具有以下有益效果:
[0031]
1.本发明通过待测样品与无缺陷标准样品进行衍射差分快速求解,以实现待测样品高效率缺陷识别与定位。
[0032]
2.本发明所提供的光刻缺陷衍射光强差分检测方法具备高精度、高效率、高正确率缺陷检测优势,能够实现半导体前道工艺光刻掩膜、晶圆等缺陷高精度、高效率、高正确率的检测。
附图说明
[0033]
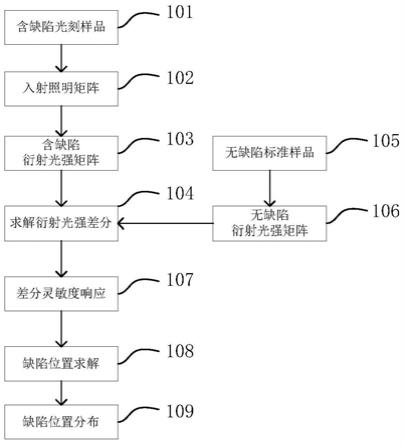
图1是本发明提供的一种光刻缺陷衍射光强差分检测方法的流程示意图;
[0034]
图2中的201、202分别是示例性缺陷光刻结构标准图形和有缺陷图形;
[0035]
图3中的301、302、303分别是示例性入射照明探针扫描轨迹及对应远场衍射光强谱;
[0036]
图4中的401、402、403、404、405、406分别是零级光强滤波下衍射光强差分对比示意图;
[0037]
图5是示例性缺陷位置求解示意图。
[0038]
在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:203-断线,204-切边,205-桥接,206-颗粒。
具体实施方式
[0039]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0040]
请参阅图1及图2,本发明提供的一种光刻缺陷衍射光强差分检测方法,所述检测方法主要包括以下步骤:
[0041]
步骤101,输入待测含缺陷光刻样品,确定检测工艺参数。其中,检测工艺参数包括光源波长、入射照明探针光场分布、入射角等。
[0042]
本实施方式中,所述照明探针直径d
p
典型值为5μm,相邻照明探针交叠比例overlap典型值为50%~70%;工艺参数包含光源波长λ=13.5nm、入射照明探针光场分布u0,远场探测器与待测光刻样品之间距离z=50mm。
[0043]
含缺陷光刻样品缺陷形态及位置见表1:
[0044]
表1
[0045][0046][0047]
步骤102,构造入射照明矩阵p(m,n,u0),以用于照明探针叠层,扫描入射待测含缺陷光刻样品o(x,y),获得样品近场电场分布u(ξ,η),所述样品近场电场分布u(ξ,η)定义为:
[0048]
u(ξ,η)=γ{p(m,n,u0),o(x,y)}
[0049][0050]
其中,lx、ly为待测光刻样品尺寸,d
p
表示入射照明探针光斑直径,overlap表示相邻探针重叠比例,m,n为照明探针扫描位置矩阵,γ{p(m,n,u0),o(x,y)}表示入射照明在(m,n)位置处以相干波前u0入射到待测光刻样品o(x,y)后所求的出射电场分布函数。
[0051]
本实施方式中,入射照明矩阵p(m,n,u0)为3维矩阵,m,n代表照明探针数量及位置分布坐标,即照明探针沿待测光刻样品x,y方向分别分布m行n列照明探针位置坐标,u0为每组照明探针光场分布矩阵。
[0052]
γ{p(m,n,u0),o(x,y)},对于3d光刻纳米结构,其采用标量衍射求解方式会引入较大近似误差,需采用基于麦克斯韦物质方程组的严格矢量衍射求解理论,求解出衍射样品近场电场分布矩阵u(ξ,η)。
[0053]
图3中301示出了入射照明探针扫描轨迹,302示出了入射照明矩阵p(m,n,u0)叠层扫描入射待测含缺陷光刻样品o(x,y),overlap典型值设定为0.5。
[0054]
步骤103,通过菲涅尔远场衍射获得含缺陷光刻样品远场衍射光强分布i(x,y)矩阵,所述含缺陷光刻样品远场衍射光强分布i(x,y)定义为:
[0055][0056]
其中,含缺陷光刻样品远场衍射光强i(x,y)为近场电场分布矩阵u(ξ,η)菲涅尔衍射积分的电场平方,λ为照明波长,z为远场探测器与待测光刻样品之间距离。
[0057]
光刻缺陷尺寸小于光刻图形尺寸,衍射光强高频信号中包含更多的缺陷衍射信号信息,这要求衍射系统需遵从远场夫琅禾费衍射模型,即衍射系统菲涅尔数nf典型值《0.1,其中所述菲涅尔数nf可表示为:
[0058][0059]
为了保证远场探测器的采样灵敏度带宽,一般会通过高通滤波器将远场衍射光强i(x,y)的零级衍射低频信息进行滤波以保留高频分量,提高缺陷位置处衍射光强高频分量的信噪比。
[0060]
图3中303示出了对应302入射照明矩阵p(m,n,u0)叠层扫描入射待测含缺陷光刻样品o(x,y)后远场获得的衍射光强分布矩阵i(x,y)。
[0061]
步骤104,求解远场衍射光强差分δi(x,y),其中无缺陷标准样品远场衍射光强分布i
*
(x,y)为已知输入条件,所述远场衍射光强差分δi(x,y)定义为:
[0062]
δi(x,y)=|i(x,y)-i
*
(x,y)|。
[0063]
其中105为提供无缺陷标准样品的步骤,106为求解得到无缺陷标准样品的远场衍射光强分布矩阵的步骤;无缺陷标准样品远场衍射光强分布i
*
(x,y)可通过两种方式获得:一是通过无缺陷样品设计版图输入至衍射光强计算模型求解得出;二是通过无缺陷样品进行衍射实验标定测量采样获得。其中,实测衍射光强i(x,y)引入了探测器噪声,探测器动态范围16bits,读出噪声6e服从高斯分布。
[0064]
步骤107,对得到的远场衍射光强差分δi(x,y)进行灵敏度响应分析,以对缺陷进行判别分析。
[0065]
其中,实测衍射光强i(x,y),为了保证远场探测器的采样灵敏度带宽,一般的会通过高通滤波器将远场衍射光强i(x,y)的零级衍射低频信息进行滤波以保留高频分量,提高缺陷位置处衍射光强高频分量的信噪比。
[0066]
图4中401示出了含缺陷位置处衍射光强高通滤波后的信噪比分布,对比402示出的无高通滤波前的信噪比分布,反应缺陷信息的
±
1、2级次的衍射光强信噪比通过高通滤波后提升了3倍;403示出了含缺陷位置处经过高通滤波后的衍射差分信号,404示出了无高通滤波前的衍射差分信号,405、406分别为403和404图中水平白线上的信噪比分布曲线,反映缺陷信息的差分光强信噪比提升了3倍。
[0067]
步骤108,基于得到的灵敏度响应分析结果进行缺陷位置求解。其中,通过截取邻近衍射差分响应下照明探针交叠区域照明探针中心坐标(xi,yi)加权归一化衍射差分响应δi(i)
uniform
极值,对缺陷精确位置(x,y)进行近似求解。所采用的公式为:
[0068][0069][0070]
其中,k为所检测缺陷位置临近区域重叠照明探针数量,max(δi(i)
uniform
)为k组衍射差分光强矩阵归一化后分别对其求极值,其范围在(0,1)之间。
[0071]
其中,差分信号交叠区域l(x,y)定位可由如下公式定义:
[0072][0073]
其中,∩{∑
m,n
p
singal(m,n)
}表示为衍射差分信号响应对应所有入射照明探针位置交集;∪{∑
m,n
p
noise(m,n)
}表示为衍射差分丢失信噪比对应所有入射照明探针位置并集。
[0074]
步骤109,重复自行步骤102-步骤108,直至整个待测光刻样品被完整扫描检测完毕,输出所有检出的缺陷位置矩阵m
xy
。
[0075]
图5中601示出了含缺陷光刻样品中通过本发明方法识别到的缺陷位置,601位置对应断线203,602位置对应切边204,603位置对应桥接205,604位置对应颗粒206。求解的缺陷精确位置(x,y)坐标距离缺陷设计位置坐标偏离度可控制在百纳米范围内。
[0076]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。