1.本实用新型涉及自动化焊接设备领域,具体是指一种工位可调的双工位课桌椅自动焊接机器人。
背景技术:
2.焊接自动化目前已广泛应用在各行各业中,课桌椅焊接是工业机器人焊接的一个应用领域,每年开学季学校对学生课桌椅采购用量很大,课桌椅是一个标准产品,但不同阶段的学校对采购课桌椅的尺寸不同,同时,同阶段的学校采购课桌椅的尺寸也略有不同,这就导致生产课桌椅的生产企业要生产多种尺寸规格的课桌椅产品,种类繁多,而且工期短,每个生产企业都在加班加点的进行生产。
3.目前生产企业对于课桌椅的焊接作业大多数还是采用人工完成,人工作业有很大的局限性,一是产品品质有时无法保证,二是人工生产效率也不稳定,手工焊接已经不能满足现代化的生产需求和质量要求。市场上的焊接机器人多为工业关节臂焊接机器人,运行精度和稳定性高,但价格高昂。而对于生产课桌椅这种简单结构件的中小企业,采用关节焊接机器人进行焊接生产,会增加企业运营成本,使企业的经营环境雪上加霜。也有针对课桌椅产品开发的专机,但只是单工位焊接,只能焊接课桌椅的支腿,不能一次完成课桌椅的焊接工作。对于课桌椅的组合焊接,还需要再购买课桌椅组合焊接专机,而且焊接专机覆盖产品尺寸范围有限,这也造成企业运营成本加高,同时焊接设备不能连续作业,这也导致设备的生产效率不高。现在市场上的课桌椅自动化焊接设备不能兼容所有课桌椅产品尺寸的焊接,也不能根据课桌椅产品尺寸调节焊接工位的工作位置,满足不了使用者的多项需求,所以急需一种可调式双工位课桌椅焊接设备来解决上述问题。
技术实现要素:
4.本实用新型就是针对上述问题,弥补现有技术的不足,提供一种工位可调式双工位课桌椅焊接机器人;本实用新型模块化设计,结构简单,成本低,在方便人员操作的同时大幅度提高机器人的焊接工作效率。
5.为实现上述目的,本实用新型采用如下技术方案。
6.本实用新型提供的技术方案为一种工位可调的双工位课桌椅自动焊接机器人:包括焊机箱体,所述焊机箱体的上部连接有x轴直线模组,所述x轴直线模组的滑动板上连接有立柱模组,所述立柱模组的一侧连接有z轴直线模组,所述z轴直线模组的滑动座一侧连接有连接板,所述连接板的另一侧设有y轴直线模组,所述连接板与y轴直线模组的滑动座连接,所述y轴直线模组的一端连接有a轴转动模块,所述a轴转动模块的一端通过焊枪防撞器连接有焊枪夹持机构,所述焊枪夹持机构上设置有焊枪,所述焊机箱体在a轴转动模块所在的一侧的两端位置连接有两个变位机安装架,在所述变位机安装架上面向相对地分别设置有b轴转动模块、c轴转动模块,所述b轴转动模块与c轴转动模块的结构相同且在同一轴线上,所述焊机箱体在a轴转动模块所在的一侧贴近b轴位置安装有工位调整机构,所述工
位调整机构通过支座上下平行安装两根光轴,所述光轴上安装有滑座,所述滑座上连接有从动支撑架,所述从动支撑架上背对背安装有两个从动支撑机构,所述两个从动支撑机构分别与所述b轴转动模块、c轴转动模块相对应;两根所述光轴中间位置安装有丝杠,所述丝杠通过两端轴承座安装在焊机箱体上,所述丝杠上连接有丝母,所述丝母与从动支撑架连接,所述丝杠的一端安装有手轮,转动所述手轮带动丝杠旋转,所述丝杠带动丝母移动,同时带动所述从动支撑机构移动,实现焊接工位间距的调整,从而满足不同尺寸课桌椅产品的焊接要求。
7.进一步地,所述从动支撑机构包括从动轴、支撑轴承和连接座,所述支撑轴承设置在从动支撑架上,所述从动轴与支撑轴承配合连接,所述从动轴与连接座连接,所述从动轴的转动轴线与b轴转动模块、c轴转动模块的转动轴线相对应。
8.本实用新型与现有技术相比的优点在于:本实用新型采用直角坐标的结构形式,多轴模块化设计,结构简单,制造成本低,能够利用更节省的空间实现对课桌椅的自动化焊接工作,稳定性好。采用近距离双工位设计,能够分别对课桌椅的大部件和小部件进行交替加工,满足所有尺寸课桌椅焊接的需求,在一个工位进行上卸料时,另一工位能够进行焊接工作,大幅度提高机器人的焊接工作效率,并且近距离的双工位能够更方便地人工进行上卸件,节省时间。
附图说明
9.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及具体实施方式,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本实用新型,并不用于限定本实用新型。
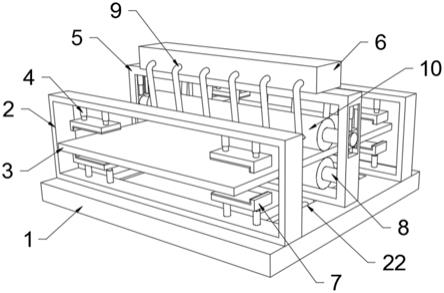
10.图1是本实用新型的整体结构示意图。
11.图2是本实用新型工位调整机构的安装后结构示意图。
12.图3是本实用新型从动支撑机构的整体安装后放大结构示意图。
13.图中标记:1-焊机箱体、2-x轴直线模组、3-立柱模组、4-z轴直线模组、5-连接板、6-y轴直线模组、7-a轴转动模块、8-焊枪防撞器、9-焊枪夹持机构、10-焊枪、11-b轴变位机安装架、12-c轴变位机安装架11、13-b轴转动模块、14-c轴转动模块、15-工位调整机构、16-从动支撑架、17-从动支撑机构、18-支座、19-光轴、20-丝杠、21-滑座、22-丝母、23-轴承座、24-手轮、25-从动轴、26-支撑轴承、27-连接座。
具体实施方式
14.结合附图1所示,本实施方式提供了一种工位可调式双工位课桌椅焊接机器人,包括焊机箱体1,焊机箱体1的上部连接有x轴直线模组2,x轴直线模组2行程2200mm;x轴直线模组2的滑动板上连接有立柱模组3,立柱模组3的一侧连接有z轴直线模组4,z轴直线模组4行程600mm;z轴直线模组4的滑动座与连接板5的一侧连接,连接板5的另一侧与y轴直线模组6的滑动座连接,y轴直线模组6行程1000mm。x轴直线模组2、y轴直线模组6和z轴直线模组4的结构均为常规技术手段的直线轴模组结构,详细结构不做赘述。
15.y轴直线模组6的一端连接有a轴转动模块7,调整角度为
±
180
°
。a轴转动模块7为常规技术手段的角度调整轴旋转的结构,具体结构在此不做赘述。
16.a轴转动模块7的一端通过焊枪防撞器8连接有焊枪夹持机构9,用于手动调整焊枪10的仰俯姿态。焊枪夹持机构9已申报专利,详细结构不做赘述。
17.焊机箱体1在a轴转动模块7所在的一侧两端位置连接有在b轴变位机安装架11、c轴变位机安装架12,上面分别设置有b轴转动模块13和c轴转动模块14,调整角度均为
±
360
°
。b轴转动模块13与c轴转动模块14的结构相同且在同一轴线上布置。
18.焊机箱体1在a轴转动模块7所在的一侧靠近b轴变位机安装架11的位置安装有工位调整机构15,工位调整机构15连接有从动支撑架16,从动支撑架16上安装有两个相对布置的从动支撑机构17,两个从动支撑机构17分别对应于b轴转动模块13与c轴转动模块14,配合b轴转动模块13与c轴转动模块14一同转动。由于b轴转动模块13和c轴转动模块14是面对布置,且是单独的运动机构,因此整个b轴转动模块13和整个c轴转动模块14在组装后形成了双工位。
19.结合附图2所示,焊机箱体1在所述a轴转动模块7所在的一侧贴近b轴转动模块13位置安装有工位调整机构15,工位调整机构15是通过支座18上下平行安装两根光轴19,光轴19上安装有滑座21,滑座21上连接有从动支撑架16,从动支撑架16上背对背安装有两个从动支撑机构17,两个从动支撑机构17分别与所述b轴转动模块13、c轴转动模块14相对应。两根平行光轴19中间位置安装有丝杠20,丝杠20通过两端轴承座23安装在焊机箱体1上,丝杠20上连接有丝母22,丝母22与从动支撑架16连接,丝杠20的一端安装有手轮24,转动手轮24带动丝杠20旋转,丝杠20带动丝母22移动,同时带动从动支撑机构17移动,实现焊接工位间距的调整,从而满足不同尺寸课桌椅产品的焊接要求。
20.这样,通过调整从动支撑机构17的位置,将c轴转动模块14与从动支撑机构17的空间尺寸加大,由于此工位空间较长,则能够用于将课桌椅的大部件置于此工位并进行焊接。b轴转动模块13也能够单独形成一个工位,能够用于将课桌椅的小部件通过工装置于b轴转动模块13上进行焊接。这样的双工位结构模式,能够在一个工位进行上卸料时,另一工位能够进行焊接工作,大幅度提高机器人的焊接工作效率。
21.结合附图3所示,从动支撑机构17包括支撑轴承26、从动轴25和连接座27,支撑轴承26安装在从动支撑架16上,从动轴25与支撑轴承26配合连接,从动轴25的前端连接连接座27,从动轴25的转动轴线与所述b轴转动模块13、c轴转动模块14的转动轴线相对应。
22.可以理解的是,以上关于本实用新型的具体描述,仅用于说明本实用新型而并非受限于本实用新型实施方式所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本实用新型进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。