1.本发明涉及危废品处理设备技术领域,具体涉及一种医疗废弃物周转箱的倾倒机器人系统。
背景技术:
2.医疗废物,是指医疗卫生机构在医疗、预防、保健以及其他相关活动中产生的具有直接或者间接感染性、毒性以及其他危害性的废物。医疗废弃物收集运送时,需要按类别分置于专用包装物或容器内,确保包装物或容器无破损、渗漏和其他缺陷,破损的包装应按治疗废物处理。
3.目前常用的收集运输方式是采用周转箱集运,周转箱装载废弃物至处理厂后,传统的方式是人工开箱、倾倒、清洗,然后再将卸空的周转箱堆摞,以便再次使用。
4.传统人工方式,不仅让人与医疗废弃物近距离接触存在危险,而且人工搬运耗费人工有效率低下,因此本公司研发全自动机器人处理周转箱方案。
5.倾倒方案研发的难点在于,机械臂夹取的周转箱需要进行翻转、上下抖动等动作,需要有效夹紧周转箱,避免脱落,且需要判断箱内废弃物是否倾倒干净。同时,周转箱的大小规格多,需要适应夹取不同规格的周转箱。
技术实现要素:
6.本发明为了解决上述技术的不足,提供了一种医疗废弃物周转箱的倾倒机器人系统。本发明的技术方案:一种医疗废弃物周转箱的倾倒机器人系统,包括周转箱、机械臂及夹爪机构,所述机械臂驱动夹爪机构夹取周转箱,所述夹爪机构包括与机械臂固定连接的底座、一对夹爪、一对连杆、活塞杆及驱动气缸,所述夹爪包括呈l型连接的横臂部及纵臂部,该横臂部与底座平行设置,所述横臂部末端设有第一铰接头,中段设有第二铰接头,该第二铰接头与底座铰接,所述一对夹爪呈镜像设置于底座上,所述气动气缸及活塞杆设置于该一对夹爪的中间,所述连杆两端分别与第一铰接头、活塞杆铰链连接,所述驱动气缸驱动活塞杆往复运动,带动一对夹爪做开合运动。
7.采用上述技术方案,夹爪可以灵活夹取周转箱。
8.本实用新型的进一步设置:所述纵臂部的竖直方向端面设有连接螺孔,所述夹爪机构还包括竖向钩件,该竖向钩件上设有连接孔,并通过螺丝与连接螺孔固定。
9.采用上述技术方案,通过设置的竖向钩件,对周转箱箱口进行挂钩,这样周转箱翻转倾倒时,就有了底部支撑,加强夹爪的抓力,避免倾倒动作导致箱体脱离。同时竖向钩件采用可拆卸的固定连接,可以对应周转箱规格更换钩件尺寸,适应不同周转箱。
10.本实用新型的进一步设置:所述纵臂部的水平方向端面设有连接螺孔,所述夹爪机构还包括水平撑件,该水平撑件设置于纵臂部与周转箱之间,所述水平撑件上设有连接孔,并通过螺栓与连接螺孔固定。
11.采用上述技术方案,周转箱尺寸变化时,会导致夹爪合拢状态,无法充分接触到周
转箱,就会造成无法夹紧,因此通过设置的水平撑件,在不拆卸夹爪的情况下,通过换装不同尺寸的水平撑件,使夹爪始终能接触到不同规格的周转箱。
12.本实用新型的进一步设置:所述底座上沿水平方向设有若干个朝向周转箱的第三接近开关,该第三接近开关检测夹爪靠近周转箱。
13.本实用新型的进一步设置:所述机器人系统还包括外置激光测距传感器,该外置激光测距传感器设置于倾倒口处,对倾倒完的周转箱空腔进行激光检测。
14.本实用新型的进一步设置:所述纵臂部的末端设有弧形引导板。
15.采用上述技术方案,弧形引导板便于将周转箱向夹爪内归拢,同时合拢后抵触周转箱外壁,辅助夹紧。
16.本实用新型的有益效果:夹爪适应多种规格的医疗废弃物周转箱。外置激光测距传感器一套,倒料完成后由机器人抓取空箱进行激光检测,采用激光测距固定,机器人夹取空箱进行多点位的检测方式,以确定是否倾倒干净。
附图说明
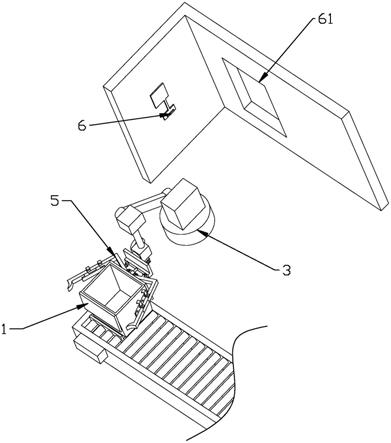
17.图1为本发明实施例的结构图1;
18.图2为本发明实施例的结构图2;
19.图3为本发明实施例的爆炸图。
20.其中,1-周转箱、3-机械臂、5-夹爪机构、51-底座、52-夹爪、521-横臂部、522-纵臂部、523-第一铰接头、524-第二铰接头、525-连接螺孔、526-弧形引导板、53-连杆、54-活塞杆、55-驱动气缸、56-竖向构件、57-水平撑件、6-外置激光测距传感器、61-倾倒口。
具体实施方式
21.如图1-3所示,一种医疗废弃物周转箱1的倾倒机器人系统,包括周转箱1、机械臂3及夹爪机构5,所述机械臂3驱动夹爪机构5夹取周转箱1,所述夹爪机构5包括与机械臂3固定连接的底座51、一对夹爪52、一对连杆53、活塞杆54及驱动气缸55,所述夹爪52包括呈l型连接的横臂部521及纵臂部522,该横臂部521与底座51平行设置,所述横臂部末端设有第一铰接头523,中段设有第二铰接头524,该第二铰接头524与底座51铰接,所述一对夹爪52呈镜像设置于底座51上,所述气动气缸及活塞杆54设置于该一对夹爪52的中间,所述连杆53两端分别与第一铰接头523、活塞杆54铰链连接,所述驱动气缸55驱动活塞杆54往复运动,带动一对夹爪52做开合运动。
22.夹爪52可以灵活夹取周转箱1。
23.所述纵臂部522的竖直方向端面设有连接螺孔525,所述夹爪机构5还包括竖向钩件56,该竖向钩件56上设有连接孔,并通过螺丝与连接螺孔525固定。
24.通过设置的竖向钩件56,对周转箱1箱口进行挂钩,这样周转箱1翻转倾倒时,就有了底部支撑,加强夹爪52的抓力,避免倾倒动作导致箱体脱离。同时竖向钩件56采用可拆卸的固定连接,可以对应周转箱1规格更换钩件尺寸,适应不同周转箱1。
25.所述纵臂部522的水平方向端面设有连接螺孔525,所述夹爪机构5还包括水平撑件57,该水平撑件57设置于纵臂部522与周转箱1之间,所述水平撑件57上设有连接孔,并通过螺栓与连接螺孔525固定。
26.周转箱1尺寸变化时,会导致夹爪52合拢状态,无法充分接触到周转箱1,就会造成无法夹紧,因此通过设置的水平撑件57,在不拆卸夹爪52的情况下,通过换装不同尺寸的水平撑件57,使夹爪52始终能接触到不同规格的周转箱1。
27.所述底座51上沿水平方向设有若干个朝向周转箱1的第三接近开关58,该第三接近开关58检测夹爪52靠近周转箱1。
28.所述机器人系统还包括外置激光测距传感器6,该外置激光测距传感器6设置于倾倒口61处,对倾倒完的周转箱1空腔进行激光检测。
29.所述纵臂部522的末端设有弧形引导板526。
30.弧形引导板526便于将周转箱1向夹爪52内归拢,同时合拢后抵触周转箱1外壁,辅助夹紧。
31.夹爪52适应多种规格的医疗废弃物周转箱1。外置激光测距传感器6一套,倒料完成后由机器人抓取空箱进行激光检测,采用激光测距固定,机器人夹取空箱进行多点位的检测方式,以确定是否倾倒干净。
技术特征:
1.一种医疗废弃物周转箱的倾倒机器人系统,包括周转箱、机械臂及夹爪机构,所述机械臂驱动夹爪机构夹取周转箱,其特征在于:所述夹爪机构包括与机械臂固定连接的底座、一对夹爪、一对连杆、活塞杆及驱动气缸,所述夹爪包括呈l型连接的横臂部及纵臂部,该横臂部与底座平行设置,所述横臂部末端设有第一铰接头,中段设有第二铰接头,该第二铰接头与底座铰接,所述一对夹爪呈镜像设置于底座上,所述驱动气缸及活塞杆设置于该一对夹爪的中间,所述连杆两端分别与第一铰接头、活塞杆铰链连接,所述驱动气缸驱动活塞杆往复运动,带动一对夹爪做开合运动。2.根据权利要求1所述的一种医疗废弃物周转箱的倾倒机器人系统,其特征在于:所述纵臂部的竖直方向端面设有连接螺孔,所述夹爪机构还包括竖向钩件,该竖向钩件上设有连接孔,并通过螺丝与连接螺孔固定。3.根据权利要求2所述的一种医疗废弃物周转箱的倾倒机器人系统,其特征在于:所述纵臂部的水平方向端面设有连接螺孔,所述夹爪机构还包括水平撑件,该水平撑件设置于纵臂部与周转箱之间,所述水平撑件上设有连接孔,并通过螺栓与连接螺孔固定。4.根据权利要求1-3任意一项所述的一种医疗废弃物周转箱的倾倒机器人系统,其特征在于:所述底座上沿水平方向设有若干个朝向周转箱的第三接近开关,该第三接近开关检测夹爪靠近周转箱。5.根据权利要求4所述的一种医疗废弃物周转箱的倾倒机器人系统,其特征在于:所述机器人系统还包括外置激光测距传感器,该外置激光测距传感器设置于倾倒口处,对倾倒完的周转箱空腔进行激光检测。6.根据权利要求5所述的一种医疗废弃物周转箱的倾倒机器人系统,其特征在于:所述纵臂部的末端设有弧形引导板。
技术总结
一种医疗废弃物周转箱的倾倒机器人系统,包括周转箱、机械臂及夹爪机构,所述机械臂驱动夹爪机构夹取周转箱,所述夹爪机构包括与机械臂固定连接的底座、一对夹爪、一对连杆、活塞杆及驱动气缸,所述夹爪包括呈L型连接的横臂部及纵臂部,该横臂部与底座平行设置,所述横臂部末端设有第一铰接头,中段设有第二铰接头,该第二铰接头与底座铰接,所述一对夹爪呈镜像设置于底座上,所述气动气缸及活塞杆设置于该一对夹爪的中间,所述连杆两端分别与第一铰接头、活塞杆铰链连接,所述驱动气缸驱动活塞杆往复运动,带动一对夹爪做开合运动。带动一对夹爪做开合运动。带动一对夹爪做开合运动。
技术研发人员:白周翔 金辉钒 叶礼 钱胜鹏 陈传周 潘成志 马骅 陈志伟
受保护的技术使用者:温州市环境发展有限公司
技术研发日:2021.11.08
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
