技术特征:
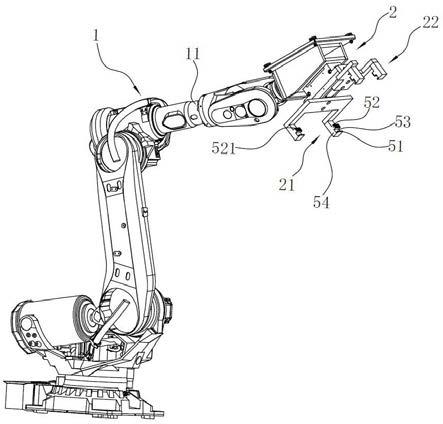
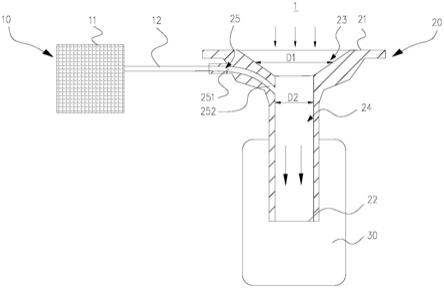
1.一种电池盒抓取转移装置,包括有:搬运装置(1);抓取机构(2),设于搬运装置(1)上,包括相对设置的第一抓取部(21)和第二抓取部(22),以形成对待转移电池盒(3)的两侧进行抓取的夹持空间;驱动机构(4),设于搬运装置(1)上,与第一抓取部(21)和第二抓取部(22)驱动相连,以用于驱动第一抓取部(21)和第二抓取部(22)相互靠近或相互远离;其特征在于:所述第一抓取部(21)和第二抓取部(22)上均具有朝向夹持空间内部设置的夹持机构,所述夹持机构包括:第一夹持部(51),与待转移电池盒(3)的上边沿相抵,以夹紧待转移电池盒(3)的上边沿;以及第二夹持部(52),与所述第一夹持部(51)相对设置,所述第一夹持部(51)与第二夹持部(52)之间形成朝向所述夹持空间的卡口(53),所述第二夹持部(52)的前端能在驱动机构(4)驱动第一抓取部(21)和第二抓取部(22)相互靠近的状态下,与待转移电池盒(3)的侧壁相抵并夹紧待转移电池盒(3)的侧边。2.根据权利要求1所述的电池盒抓取转移装置,其特征在于:所述第二夹持部(52)的前端表面上设置有凹凸不平的纹路(521),以增大第二夹持部(52)与待转移电池盒(3)之间的摩擦力。3.根据权利要求2所述的电池盒抓取转移装置,其特征在于:所述夹持机构呈侧“u”字型,包括呈板状的第一夹持部(51)、呈板状的第二夹持部(52)以及连接第一夹持部(51)和第二夹持部(52)之间的连接部(54)。4.根据权利要求1~3任一项所述的电池盒抓取转移装置,其特征在于:所述搬运装置(1)为具有机械臂(11)的机器人,所述抓取机构(2)设于所述机器人的机械臂(11)前端上。5.根据权利要求4所述的电池盒抓取转移装置,其特征在于:所述机器人的机械臂(11)前端还设有与驱动机构(4)相连接的传动机构以及在驱动机构(4)的驱动作用下由传动机构带动相互靠近或相互远离的第一传动块(71)和第二传动块(72),所述第一传动块(71)与所述第一抓取部(21)相连接,所述第二传动块(72)与第二抓取部(22)相连接。6.根据权利要求5所述的电池盒抓取转移装置,其特征在于:所述机器人的机械臂(11)前端还设有用于供第一传动块(71)和第二传动块(72)安装的基座(8),所述基座(8)内设有滑槽(81),所述第一传动块(71)和第二传动块(72)并排设于滑槽(81)内,所述滑槽(81)的两侧设有第一齿条(810),相应地,所述第一传动块(71)和第二传动块(72)的两侧壁均设有与第一齿条(810)相啮合的第二齿条(710)。7.根据权利要求5或6所述的电池盒抓取转移装置,其特征在于:所述传动机构包括:齿轮(61),套设在所述驱动机构(4)的输出轴(41)上;第三齿条(62),具有与所述第一传动块(71)相固定连接的第一端以及具有朝向第二传动块(72)方向延伸的第二端,所述第三齿条(62)与齿轮(61)相啮合;以及第四齿条(63),具有与所述第二传动块(72)相固定安装的第一端以及朝向第一传动块(71)方向延伸的第二端,所述第四齿条(63)与所述第三齿条(62)相对设置且与齿轮(61)相啮合。
技术总结
本实用新型涉及一种电池盒抓取转移装置,包括有:搬运装置;抓取机构,设于搬运装置上,包括相对设置的第一抓取部和第二抓取部,以形成夹持空间;驱动机构,设于搬运装置上,与第一抓取部和第二抓取部驱动相连;第一抓取部和第二抓取部上均具有朝向夹持空间内部设置的第一夹持部和第二夹持部,第一夹持部与待转移电池盒的上边沿相抵,以夹紧待转移电池盒的上边沿;第二夹持部与第一夹持部相对设置,第一夹持部与第二夹持部之间形成朝向所述夹持空间的卡口,第二夹持部的前端能在驱动机构驱动第一抓取部和第二抓取部相互靠近的状态下,与待转移电池盒的侧壁相抵并夹紧待转移电池盒的侧边。该抓取过程易实现,且抓取牢固以及易放下电池盒。下电池盒。下电池盒。
技术研发人员:马焕祥 牛朋 南林涛
受保护的技术使用者:宁波旭升汽车技术股份有限公司
技术研发日:2022.03.17
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。