1.本实用新型涉及焊接技术领域,具体是一种氩弧焊激光焊缝跟踪调整装置。
背景技术:
2.国内焊接机器人市场较大,但各家品牌侧重不同,实现焊接引导功能多较为单一。板式换热器的焊缝密集且通常尺寸非常小,密封精度又非常高,密封要求通常达到ip67,这就对焊枪选择及焊接方式提出较高要求。市场上目前多采用机器人氩弧焊接方式对板式换热器进行焊接,但受限于产品的批量性生产要求,换热器工件表面复杂的行径方式及焊接表面精度要求,焊接效果并不稳定,且在焊接时通过焊接机器人的焊缝跟踪传感器对焊接位置进行追踪,现有的焊缝跟踪传感器安装完成之后不便于调整追踪角度,影响焊件批量焊接时的稳定性。
3.公开号为cn209288500u的中国专利文件中基于cmos的紧凑型机器人焊缝跟踪激光视觉传感器,包括:安装支架和系统外壳,摄像机、激光器和减光滤光系统安装在系统外壳内,安装支架设置于焊枪上,通过安装支架实现激光视觉跟踪传感器角度的调整。
4.上述方案中虽然通过安装支架的设置在一定程度上提高了激光视觉跟踪传感器角度和位置调节的便捷性,但是,通过连接夹具和调位夹具的配合实现激光视觉跟踪传感器的位置和角度调节时,调节幅度较大,精准度较低,影响调节的精准性,且将整体通过安装架固定在焊枪上,增加焊枪整体的重量,影响焊枪的安装稳定性,从而影响焊接的稳定性。
技术实现要素:
5.本实用新型的目的在于提供一种氩弧焊激光焊缝跟踪调整装置,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种氩弧焊激光焊缝跟踪调整装置,包括与外界机械臂连接的安装基座,所述安装基座的右侧顶部设置有第一安装座,所述第一安装座的顶端设置有第一安装板,所述第一安装板上可拆卸设置有焊枪,所述第一安装座的下方设置有垂直于安装基座设置有第二安装座,所述第二安装座上水平滑动连接有第二安装板,所述第二安装板上竖直纵向滑动连接有第三安装板,所述第三安装板上转动安装有激光视觉跟踪传感器,所述第三安装板上开设有弧形调节槽,所述弧形调节槽与激光视觉跟踪传感器的转动同轴心,所述激光视觉跟踪传感器上对应弧形调节槽设置有调节限位组件。
8.作为本实用新型进一步的方案:所述第一安装板上设置有安装块,所述安装块上方设置有固定块,所述安装块和固定块上配合开设有固定槽,所述焊枪安装于固定槽内,通过安装块和固定块的配合提高焊枪在第一安装板上的稳定性。
9.作为本实用新型再进一步的方案:所述安装块和固定块上对应开合有四组螺栓孔,所述螺栓孔内设置有紧固螺栓,通过紧固螺栓和螺栓孔的配合便于固定块和安装块拆
卸,从而便于焊枪的安装和拆卸。
10.作为本实用新型再进一步的方案:所述第二安装座上上下对应开设有两组横向调节槽,所述第二安装板上设置有两个第一连接柱,所述第一连接柱位于对应的横向调节槽内,所述第一连接柱远离第二安装板的一端螺纹设置有第一锁紧头,通过第一连接柱、横向调节槽以及第一锁紧头的配合便于第二安装板在第二安装座上的横向移动,从而实现激光视觉跟踪传感器的横向位置调节。
11.作为本实用新型再进一步的方案:所述第二安装板上对应开设有两组纵向调节槽,所述第三安装板上设置有两组第二连接柱,所述第二连接柱位于对应的纵向调节槽内,且所述第二连接柱远离第三安装板的一侧设置有第二锁紧头,通过第二连接柱、纵向调节槽以及第二锁紧头的配合便于第三安装板在第二安装板上的纵向调节,从而实现激光视觉跟踪传感器的纵向位置调节。
12.作为本实用新型再进一步的方案:所述调节限位组件包括位于激光视觉跟踪传感器底端的第三连接柱,所述第三连接柱位于弧形调节槽内,且所述第三连接柱远离激光视觉跟踪传感器的一端设置有第三锁紧头,通过第三连接柱、弧形调节槽以及第三锁紧头的配合实现激光视觉跟踪传感器在第三安装板上的角度调节。
13.作为本实用新型再进一步的方案:所述第二安装座与安装基座之间一体成型,加强第二安装座的稳定性。
14.相比于现有技术,本实用新型的优点在于:
15.1、本实用新型包括安装基座,安装基座上设置有焊枪和激光视觉跟踪传感器,且激光视觉跟踪传感器可相对于安装基座实现水平横向移动、竖直纵向移动以及检测角度的调节。
16.2、本实用新型中焊枪通过第一安装座、第一安装板、安装块以及固定块的配合可拆卸的安装在安装基座上,便于焊枪的安装和拆卸,提高检修的便捷性,同时将激光视觉跟踪传感器与焊枪分开安装,提高了激光视觉跟踪传感器的调节便捷性,同时减轻了焊枪的重量,提高了焊枪的安装稳定性,从而提高焊接质量和焊接稳定性。
17.3、另外,本实用新型将激光视觉跟踪传感器通过第二基座、第二安装板和第三安装板的配合安装在安装基座上,实现在小空间内的水平横向、竖直纵向以及检测角度的调节,提高调节便捷性和灵活性,从而提高调节的精准性,且占用空间小,安装方便。
附图说明
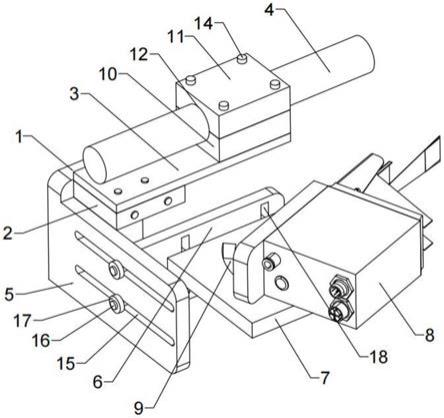
18.图1为本实用新型的一种氩弧焊激光焊缝跟踪调整装置的整体结构示意图;
19.图2为本实用新型中安装基座、第二安装座、第二安装板以及第三安装板之间的连接关系示意图一;
20.图3为本实用新型中安装基座、第二安装座、第二安装板以及第三安装板之间的连接关系示意图二;
21.图4为本实用新型中激光视觉跟踪传感器与第三安装板之间的连接关系示意图;
22.图5为本实用新型中第一安装板、安装块、焊枪以及固定块之间的连接关系分解示意图。
23.图中:1、安装基座;2、第一安装座;3、第一安装板;4、焊枪;5、第二安装座;6、第二
安装板;7、第三安装板;8、激光视觉跟踪传感器;9、弧形调节槽;10、安装块;11、固定块;12、固定槽;13、螺栓孔;14、紧固螺栓;15、横向调节槽;16、第一连接柱;17、第一锁紧头;18、纵向调节槽;19、第二连接柱;20、第二锁紧头;21、第三连接柱;22、第三锁紧头。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例1:
26.请参靠图1至图5,本实用新型实施例中:
27.一种氩弧焊激光焊缝跟踪调整装置,包括与外界机械臂连接的安装基座1,安装基座1的右侧顶部设置有第一安装座2,第一安装座2的顶端设置有第一安装板3,第一安装板3上可拆卸设置有焊枪4,第一安装座2的下方设置有垂直于安装基座1设置有第二安装座5,第二安装座5上水平滑动连接有第二安装板6,第二安装板6上竖直纵向滑动连接有第三安装板7,第三安装板7上转动安装有激光视觉跟踪传感器8,激光视觉跟踪传感器8优选深浦-la-zb006sp型号,第三安装板7上开设有弧形调节槽9,弧形调节槽9与激光视觉跟踪传感器8的转动同轴心,激光视觉跟踪传感器8上对应弧形调节槽9设置有调节限位组件。
28.参考图1和图5,在本实用新型实施例中:第一安装板3上设置有安装块10,安装块10上方设置有固定块11,安装块10和固定块11上配合开设有固定槽12,焊枪4安装于固定槽12内,安装块10和固定块11上对应开合有四组螺栓孔13,螺栓孔13内设置有紧固螺栓14,通过固定块11与安装块10的配合提高焊枪4在第一安装板3上的安装稳定性,安装时,将焊枪4首先放置在安装块10上的固定槽12内,然后将固定块11扣合在安装块10上,使得焊枪4的上部分位于固定块11的固定槽12内,然后,将紧固螺栓14旋拧在固定块11和安装块10上的螺栓孔13内,实现固定块11和安装块10之间的固定,从而通过安装块10与固定块11的配合实现焊枪4的固定,同时也便于焊枪4的安装和拆卸。
29.参考图2,在本实用新型实施例中:第二安装座5上上下对应开设有两组横向调节槽15,第二安装板6上设置有两个第一连接柱16,第一连接柱16位于对应的横向调节槽15内,第一连接柱16远离第二安装板6的一端螺纹设置有第一锁紧头17,通过第一连接柱16与横向调节槽15的配合实现第二安装板6在第二安装座5上的水平横向调节,从而位于第二安装板6上的第三安装板7的水平横向调节,进而实现位于第三安装板7上的激光视觉跟踪传感器8的水平横向调节,另外,通过第一连接柱16和第一锁紧头17的配合可以实现水平位置调节之后的锁紧,通过两组第一连接柱16和横向调节槽15的设置,提高水平横向调节时的稳定性。
30.参考图3,在本实用新型实施例中:第二安装板6上对应开设有两组纵向调节槽18,第三安装板7上设置有两组第二连接柱19,第二连接柱19位于对应的纵向调节槽18内,且第二连接柱19远离第三安装板7的一侧设置有第二锁紧头20,通过第二连接柱19与纵向调节槽18的配合实现第三安装板7在第二安装板6上的纵向调节,从而实现位于第三安装板7上的激光视觉跟踪传感器8的纵向调节,另外,通过第二连接柱19和第二锁紧头20的配合可以
实现纵向位置调节之后的锁紧,通过两组第二连接柱19和纵向调节槽18的设置,提高竖直纵向调节时的稳定性。
31.参考图4,在本实用新型实施例中:调节限位组件包括位于激光视觉跟踪传感器8底端的第三连接柱21,第三连接柱21位于弧形调节槽9内,且第三连接柱21远离激光视觉跟踪传感器8的一端设置有第三锁紧头22,通过第三连接柱21与弧形调节槽9的配合,第三连接柱21在弧形调节槽9内部移动时,带动激光视觉跟踪传感器8的转动,从而实现激光视觉跟踪传感器8检测角度的调整,第三锁紧头22与第三连接柱21的配合实现第三连接柱21调节完成之后的锁紧固定。
32.参考图2,在本实用新型实施例中:第二安装座5与安装基座1之间一体成型,加强第二安装基座1的稳定性。
33.实施例2:
34.参考图1-图5,本实用新型涉及一种氩弧焊激光焊缝跟踪调整装置,包括安装基座1,安装基座1上设置有焊枪4和激光视觉跟踪传感器8,且激光视觉跟踪传感器8可相对于安装基座1实现水平横向移动、竖直纵向移动以及检测角度的调节,焊枪4通过第一安装座2、第一安装板3、安装块10以及固定块11的配合可拆卸的安装在安装基座1上,便于焊枪4的安装和拆卸,提高检修的便捷性,同时将激光视觉跟踪传感器8与焊枪4分开安装,提高了激光视觉跟踪传感器8的调节便捷性,同时减轻了焊枪4的重量,提高了焊枪4的安装稳定性,从而提高焊接质量和焊接稳定性,另外,本实用新型将激光视觉跟踪传感器8通过第二基座、第二安装板6和第三安装板7的配合安装在安装基座1上,实现在小空间内的水平横向、竖直纵向以及检测角度的调节,提高调节便捷性和灵活性,从而提高调节的精准性,且占用空间小,安装方便。
35.实施例3:
36.参考图1-图5,在实施例2的基础上,本实用新型涉及一种氩弧焊激光焊缝跟踪调整装置,包括安装基座1,安装基座1上安装有焊枪4和激光视觉跟踪传感器8,当安装焊枪4时,将焊枪4首先放置在安装块10上的固定槽12内,然后将固定块11扣合在安装块10上,使得焊枪4的上部分位于固定块11的固定槽12内,然后,将紧固螺栓14旋拧在固定块11和安装上的螺栓孔13内,实现固定块11和安装块10之间的固定,从而通过安装块10与固定块11的配合实现焊枪4的固定,同时,安装块10和固定块11之间通过紧固螺栓14和螺栓孔13的配合可拆卸连接,提高焊枪4的安装和拆卸便捷性。
37.实施例4:
38.参考图1-图5,在实施例3的基础上,本实用新型涉及一种氩弧焊激光焊缝跟踪调整装置,包括安装基座1,安装基座1上安装有焊枪4和激光视觉跟踪传感器8,当需要调节激光视觉跟踪传感器8的位置和角度时:
39.调节水平横向位置时:松拧第一锁紧头17,通过第一连接柱16与横向调节槽15的配合实现第二安装板6在第二安装座5上的水平横向调节,从而实现位于第二安装板6上的第三安装板7的水平横向调节,进而实现位于第三安装板7上的激光视觉跟踪传感器8的水平横向调节,调节完成之后,紧拧第一锁紧头17,实现第一连接柱16与第二安装座5之间的锁紧固定,从而实现第二安装板6的锁紧固定,通过两组第一连接柱16和横向调节槽15的设置,提高水平横向调节时的稳定性;
40.调节竖直纵向位置时:松拧第二锁紧头20,通过第二连接柱19与纵向调节槽18的配合实现第三安装板7在第二安装板6上的纵向调节,从而实现位于第三安装板7上的激光视觉跟踪传感器8的纵向调节,调节完成之后,紧拧第二锁紧头20,通过第二连接柱19和第二锁紧头20的配合可以实现第三安装板7纵向位置调节之后的锁紧,通过两组第二连接柱19和纵向调节槽18的设置,提高竖直纵向调节时的稳定性。
41.调节检测角度时:松拧第三锁紧头22,通过第三连接柱21与弧形调节槽9的配合,第三连接柱21在弧形调节槽9内部移动时,带动激光视觉跟踪传感器8的转动,从而实现激光视觉跟踪传感器8检测角度的调整,调节完成之后,紧拧第三锁紧头22,通过第三锁紧头22与第三连接柱21的配合实现第三连接柱21调节完成之后的锁紧固定,从而实现激光视觉跟踪传感器8的固定。
42.上文中提到的全部方案中,涉及两个部件之间连接的可以根据实际情况选择焊接、螺栓和螺母的配合连接、螺栓或螺钉连接或者其他公知的连接方式,在此不一一赘述,上文凡是涉及有写固定连接的,优先考虑焊接,以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
