1.本发明涉及一种开闭车门的门闩锁装置。
背景技术:
2.车辆的门闩锁装置设置有用于对设置在车辆本体侧的撞针闩锁和解除闩锁的闩锁机构,并且通过闩锁机构关闭和打开门。
3.专利文献1说明了一种门闩锁装置,其包括能够通过马达动力释放闩锁机构与撞针之间的啮合的电动释放机构、能够通过手动操作力释放闩锁机构的啮合的手动释放机构以及能够在锁定状态和解锁状态之间切换的锁定机构,锁定状态使手动释放机构的释放操作失效,解锁状态使手动释放机构的释放操作成为可能。
4.在这种门闩锁装置中,优选地,除了设置在车辆本体侧的马达的驱动源(例如,12v电池)之外,在门闩锁装置中配备了应急供电部件。结果,即使在诸如车辆碰撞事件中不能从马达的驱动源适当地供给电力时,也可以利用来自应急供电部件的电力使锁定机构从锁定状态变到解锁状态,因而乘员可以通过手动释放机构的释放操作离开车辆。
5.另外,由于这样的门闩锁装置内置在车门中,所以需要以不阻碍窗玻璃的轨迹的方式配置门闩锁装置。因此,迄今为止采取了各种措施(例如,专利文献2至4)。
6.现有技术文献
7.专利文献
8.专利文献1:日本特许第6213927号公报
9.专利文献2:日本特开2000-027514号
10.专利文献3:日本特开平2-030868号
11.专利文献4:日本特开2001-262903号
技术实现要素:
12.发明要解决的问题
13.为了防止门闩锁装置阻碍窗玻璃的轨迹,优选地减小门闩锁装置的尺寸。即使当诸如电容器的蓄电体配置在门闩锁装置内部作为应急供电部件时,也需要采取措施防止门闩锁装置大型化。
14.本发明提供一种小型化的门闩锁装置,其设置有作为应急供电部件的蓄电体。
15.用于解决问题的方案
16.本发明是一种门闩锁装置,其设置在车辆的门中并且通过对设置在所述车辆的本体侧的撞针闩锁和解除闩锁来关闭和打开所述门,所述门闩锁装置包括:马达;机械机构,其由所述马达驱动;门锁ecu,其被构造成控制所述马达;和壳体,其用于收容所述马达、所述机械机构和所述门锁ecu,其中,所述门锁ecu包括印刷线路板和连接到所述印刷线路板的蓄电体,所述壳体具有:分隔壁;第一收容空间,其用于在所述分隔壁的一侧收容所述马达和所述机械机构;和第二收容空间,其用于在所述分隔壁的另一侧收容所述印刷线路板
和所述蓄电体,所述分隔壁设置有蓄电体收容部,所述蓄电体收容部从所述第二收容空间朝向所述第一收容空间凹陷,并且所述蓄电体置于所述蓄电体收容部中。
17.发明的效果
18.根据本发明,由于体积相对较大的蓄电体配置在从第二收容空间朝向第一收容空间凹陷的蓄电体收容部中,所以门闩锁装置可以小型化。结果,可以在不阻碍窗玻璃的轨迹的状态下将门闩锁装置配置在门内部。
附图说明
19.图1是从车辆的斜后方外侧观察的根据本发明的实施方式的门闩锁装置的立体图。
20.图2是从车辆的斜前方外侧观察的图1的门闩锁装置的立体图。
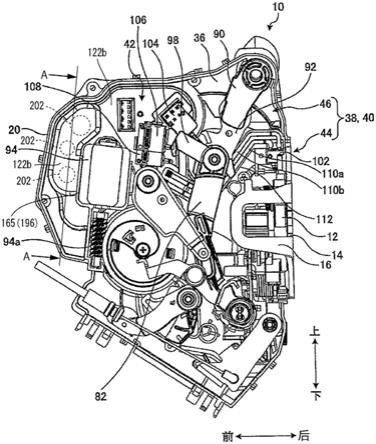
21.图3是示出图1的门闩锁装置的内部的侧视图。
22.图4是闩锁机构的立体图。
23.图5是从斜后方内侧观察的锁定机构的立体图。
24.图6是从斜前方外侧观察的锁定机构的立体图。
25.图7示出了用于说明当凸轮环正转时的锁定机构的操作的图,其中,(a)是示出凸轮环处于基准位置的基本状态的图,(b)是示出凸轮环略微从基准位置正转的状态的图,(c)是示出凸轮环从基准位置正转约40
°
的状态的图,(d)是示出凸轮环从基准位置正转约90
°
的状态的图,(e)是示出凸轮环从基准位置正转约190
°
的状态的图,以及(f)是示出凸轮环从基准位置正转约250
°
的状态的图。
26.图8示出了用于说明当凸轮环正转和反转时的锁定机构的操作的图,其中,(a)是示出凸轮环处于基准位置的基本状态的图,(b)是示出凸轮环从基准位置反转约40
°
的状态的图,(c)是示出凸轮环从(b)的状态正转约40
°
的状态的图,以及(d)是示出凸轮环从(c)的状态正转约40
°
的状态的图。
27.图9是从斜前方外侧观察的电气部件、收纳电气部件所需的部件等的分解立体图。
28.图10是从斜前方内侧观察的电气部件、收纳电气部件所需的部件等的分解立体图。
29.图11是搭载有电容器的印刷线路板的正面图。
30.图12是沿着图3的线a-a截取的截面图。
具体实施方式
31.以下,将参照附图详细说明根据本发明的实施方式的门闩锁装置。
32.以下,门闩锁装置10的说明中的方向标记以车辆为基准。以车辆为基准的方向在图上适当地用箭头表示上下、内外(即,室内侧和室外侧)以及前后。此外,旋转零件的旋转方向(顺时针方向,逆时针方向)的标记基本上遵循当时参照的图。各图所示的门闩锁装置10例示了适用于车辆的右侧门的门闩锁装置,但适用于左侧门的门闩锁装置可以是对称结构。
33.图1是从斜后方观察的根据本实施方式的门闩锁装置10的立体图,图2是从车辆外侧的斜前方观察的门闩锁装置10的立体图。
34.门闩锁装置10附接到车辆的门的内部,并通过对设置在车辆本体侧的撞针进行闩锁和解除闩锁来关闭和打开门。设置有用于闩锁撞针的门闩锁装置10的门例如是车辆的侧门,但是“门”是广义的,并且可以适用于发动机罩、后备箱盖、尾门等。首先,将说明门闩锁装置10的概略总体构造。
35.如图1和图2所示,在门闩锁装置10中,用于闩锁撞针的闩锁12设置在撞针进入槽14的背侧。闩锁12是闩锁机构44的一部分,闩锁机构44通过闩锁后述的撞针来将门保持在关闭状态。撞针进入槽14形成为盖板16的一部分。主体18设置在盖板16周围。闩锁机构44的内侧和后侧由盖板16和主体18覆盖。
36.除了上述盖板16和主体18之外,门闩锁装置10还覆盖有壳体20、第一盖22和第二盖24。壳体20主要覆盖外侧,第一盖22主要覆盖内侧,第二盖24还覆盖壳体20的内侧的前上部。盖板16、主体18、壳体20、第一盖22和第二盖24形成门闩锁装置10的外壳。
37.门闩锁装置10还包括覆盖上表面的防水盖26、位于内侧下方的线缆盖28、设置在内上部的联接器30以及设置在外上部的锁芯连接部32。防水盖26覆盖壳体20和第一盖22之间的边界以防止水滴进入。线缆盖28覆盖连接到线缆35的部分。线缆35连接到内手柄(未示出)。线束连接器(未示出)连接到联接器30。海绵可以设置在联接器30周围。锁芯连接部32是锁芯插入和操作的部分。连接到外手柄(未示出)的外杆34的端部露出在门闩锁装置10的外侧面上。
38.图3是示出门闩锁装置10的内部的侧视图。图3示出了在去除主体18、第一盖22、防水盖26和线缆盖28的状态下的门闩锁装置10。
39.如图3所示,在门闩锁装置10的内侧形成第一收容空间36。第一收容空间36是外侧覆盖有壳体20并且内侧主要覆盖有第一盖22的区域。除了第一盖22之外,第一收容空间36的内侧还覆盖有盖板16、主体18和线缆盖28。
40.第一收容空间36大致可分为放置机械机构38的机构区域40和放置电气部件的电气部件区域42。电气部件区域42占据前上方部,机构区域40占据第一收容空间的剩余部分。机械机构38具有闩锁机构44和锁定机构46,闩锁机构44通过闩锁12对撞针进行闩锁和解除闩锁,锁定机构46锁定和解锁闩锁机构44。闩锁机构44置于第一收容空间36的后方并覆盖有盖板16和主体18。在门闩锁装置10中,除了第一收容空间36之外,还形成第二收容空间124(参照图10)。后面将说明第二收容空间124。
41.机械机构38包括能够通过马达94的动力释放闩锁机构44的电动释放部件和能够通过手动操作力释放闩锁机构44的手动释放部件。电动释放部件是通过具有后述的马达94和凸轮环76等的用于对撞针解除闩锁的部件。手动释放部件是经由与手动操作机械地连动的后述的外杆34以及内杆59来对撞针解除闩锁的部件。
42.图4是闩锁机构44的立体图。如图4所示,除了上述闩锁12和外杆34之外,闩锁机构44还具有基部支架50、棘轮52、棘轮保持件54、棘轮杆56、防死机杆(anti-panic lever)58和内杆59。闩锁机构44的各元件均由基部支架50支撑或枢转地支撑。
43.闩锁12由轴部60枢转地支撑并且包括撞针接合槽12a和棘轮接合部12b。当撞针从打开的门状态进入撞针接合槽12a并且棘轮52与棘轮接合部12b接合以将撞针闩锁在全闩锁位置时,闩锁12抵抗弹簧(未示出)旋转,使得门关闭。
44.棘轮52具有由轴部62枢转地支撑的基部杆64以及相对于基部杆64由根轴部66a枢
转地支撑的极杆(pole lever)66。基部杆64由弹簧65弹性地施力。极杆66相对于基部杆64在预定角度范围内弯曲。棘轮52由棘轮保持件54从侧面支撑而保持大致直线姿势,并且极杆66的尖端与棘轮接合部12b接合以将闩锁12保持在全闩锁位置。
45.棘轮保持件54由轴部68枢转地支撑并且由弹簧70弹性地施力以支撑基部杆64的侧面。棘轮保持件54基于棘轮杆56的操作抵抗弹簧70的弹性力地旋转以与基部杆64分离。于是,在根轴部66a作为基准的情况下,棘轮52的基部杆64和极杆66处于屈曲状态,并且极杆66与棘轮接合部12b分离,闩锁12被释放。闩锁12通过弹性力旋转以对撞针解除闩锁并开门。通过经由棘轮保持件54操作棘轮52,与直接地操作棘轮52时相比,可以以较轻的力操作棘轮52。
46.棘轮杆56由基部支架50枢转地支撑,并且包括向旋转轴线内侧突出的受动部56a和向旋转轴线外侧突出的作用部56b。在棘轮杆56中,随着受动部56a向上移动,作用部56b使棘轮保持件54旋转。
47.外杆34由轴部72枢转地支撑并且具有向轴部72外侧突出的手柄操作部34a、向轴部72内侧突出的作用部34b以及杆受动片(lever passive piece)34c。手柄操作部34a是由外手柄操作的部分。作用部34b插入防死机杆58的孔58a中并且是作用于防死机杆58的部分。作用部34b还插入后述的打开连杆80的异型孔80b中。杆受动片34c位于作用部34b下方并由内杆59操作。外杆34通过手柄操作部34a或杆受动片34c的操作旋转,并且向上推动防死机杆58。
48.内杆59由轴部74枢转地支撑,并且通过线缆35的操作而摆动,并且操作片59a向上推动杆受动片34c。
49.防死机杆58包括插入作用部34b的孔58a和在上方屈曲的作用片58b。当后述的打开连杆80处于解锁位置时,通过外杆34的旋转,防死机杆58被作用部34b向上推动,并且作用片58b向上推动棘轮杆56的受动部56a。因此,棘轮保持件54和棘轮52进行解除闩锁操作。防死机杆58由于防死机机构而具有与打开连杆80分离的结构。
50.图5是从内侧斜后方倾斜地观察的锁定机构46的立体图,图6是从外侧前方倾斜地观察的锁定机构46的立体图。在图5中,为了能够理解锁定机构46的配置,简单地一起示出了壳体20。在图5和图6中,锁定机构46处于锁定状态。
51.如图5和图6所示,锁定机构46包括由轴部76a枢转地支撑的凸轮环76,由轴部78a枢转地支撑并由凸轮环76驱动的凸轮杆78、由凸轮杆78驱动的打开连杆80、与打开连杆80连动的副锁定杆82以及由轴部84a枢转地支撑并由凸轮环76驱动的打开杆84。锁定机构46还包括与副锁定杆82连动的锁定杆86和辅助杆88,以及与锁芯操作连动以驱动副锁定杆82的锁芯杆90和副锁芯杆92。在各图中,为了便于识别部件,锁定杆86示出于暗点区域并且打开连杆80示出于亮点区域。
52.凸轮环76为圆盘状并且通过马达94的旋转轴的蜗杆94a通过设置在外周面上的驱动齿而旋转。省略了齿的图示。马达94置于电气部件区域42(参照图3)。至于凸轮环76的旋转方向,以图5为基准,顺时针方向为正转,逆时针方向为反转。
53.凸轮环76包括凸轮76b。当凸轮环76处于基准位置时,凸轮76b具有直径从轴部76a的正下方沿逆时针方向在大致270
°
的范围上逐渐增大的形状。凸轮76b在大致270
°
的位置处接近凸轮环76的半径,并且该直径被维持到逆时针方向上的大致180
°
。
54.如图6所示,凸轮环76在内表面上设置有辅助部件77。凸轮环76和辅助部件77固定并且实质上为一个部件。弹簧76c设置在由辅助部件77形成的圆筒77a的内部。弹簧76c施力使得凸轮环76处于中立的基准位置。凸轮环76可以通过马达94的操作抵抗弹簧76c从基准位置正转和反转。
55.辅助部件77包括在外周附近向内突出的突起77b和设置在突起77b的大致相反侧的第一倾斜壁77c。当凸轮环76反转时,突起77b抵接设置在壳体20(参照图2)中的弹性止动件96,以限制凸轮环76的旋转。第一倾斜壁77c形成为宽度从圆筒77a的圆筒面沿着逆时针方向径向增大。
56.凸轮环76还包括第二倾斜壁76d和保持壁76e。第二倾斜壁76d形成为宽度从圆筒77a的圆筒面沿着顺时针方向径向增大。第一倾斜壁77c和第二倾斜壁76d形成为在靠近位置彼此相对并且彼此相反地倾斜。第一倾斜壁77c配置在第二倾斜壁76d的外侧。保持壁76e设置在第二倾斜壁76d的略微逆时针方向侧并且是沿着凸轮环76的周面向外突出的圆弧状的壁。如图6所示,保持壁76e的顺时针方向侧闭合,逆时针方向侧开放。
57.返回到图5,凸轮杆78的下表面78d抵接凸轮76b,并且当凸轮环76旋转时,凸轮杆78由凸轮76b驱动并且抵抗弹簧78b逆时针地摆动。凸轮杆78前端的旋钮78c嵌合在打开连杆80的侧面引导槽80a中,当凸轮杆78沿顺时针方向摆动时,处于倾斜状态的打开连杆80直立。
58.异型孔80b形成在打开连杆80的下端位置。外杆34的作用部34b(参照图4)插入异型孔80b中并且打开连杆80通过外杆34的操作被向上抬起。防死机杆58附接到打开连杆80的下端部并且与打开连杆80一体地升降和倾斜。
59.打开连杆80是可以通过凸轮杆78在倾斜姿势(在图5所示的姿势)的锁定位置和直立姿势(参照图8的(b))的解锁位置之间切换的部件。当打开连杆80在锁定位置时,锁定机构46处于锁定状态,当打开连杆80在解锁位置时,锁定机构46处于解锁状态。打开连杆80的位置也可以通过锁定杆86切换。
60.即,当打开连杆80在锁定位置时,即使在防死机杆58被外杆34抬起时,防死机杆58(参照图4)也与打开连杆80一起倾斜,使得防死机杆58不抵接棘轮杆56(参照图4),即,防死机杆58空振。因此,棘轮杆56不操作,并且门在关闭时处于锁定状态。
61.另一方面,当打开连杆80在解锁位置时,当防死机杆58被外杆34抬起时,防死机杆58还与打开连杆80一起直立,使得防死机杆58抵接棘轮杆56并被向上推动。因此,棘轮杆56操作,并且门处于可以被打开的解锁状态。
62.副锁定杆82由轴部82a枢转地支撑并且能摆动。副锁定杆82通过锁芯杆90和副锁芯杆92摆动驱动,使得打开连杆80可以在锁定位置和解锁位置之间切换。即,副锁定杆82可以在锁定状态和解锁状态之间切换。当副锁定杆82在锁芯杆90和副锁芯杆92的作用下逆时针方向摆动时,打开连杆80的上部经由锁定杆86的内旋钮86i(参照图7的(d))从副锁定杆82被推出并且沿顺时针方向摆动以到达解锁位置。当副锁定杆82沿顺时针方向摆动并返回初始位置时,凸轮杆78传递弹簧78b的弹性力,因此打开连杆80沿逆时针方向摆动以到达锁定位置。从轴部82a向前突出的臂98设置在副锁定杆82的上部。臂98用作用于识别锁定机构46是锁定状态还是解锁状态的部件,并且执行后述第一锁定位置开关106和第二锁定位置开关108(参照图3)的切换操作。
63.打开杆84是用于基于电动释放(即驾驶员等的切换操作)来打开门的部件。打开杆84包括向前突出的凸轮受动部84b和向后突出的棘轮操作部84c,并且由弹簧84d顺时针施力。当凸轮环76正转时,凸轮76b向下推动凸轮受动部84b,打开杆84抵抗弹簧84d绕轴部84a逆时针旋转,因此棘轮操作部84c上升。随着棘轮操作部84c上升,棘轮杆56的受动部56a被向上推动,闩锁机构44解除闩锁,因此门被打开。当凸轮环76返回基准位置时,打开杆84也通过弹簧84d返回基准姿势。
64.打开杆84可以独立于打开连杆80来操作棘轮杆56。因此,根据打开杆84,即使当锁定机构46处于锁定状态(即,打开连杆80处于锁定位置)时,也可以基于电动释放部件打开门。
65.如图6所示,锁定杆86由轴部86a枢转地支撑并且包括向上延伸的臂86b、从臂86b的前端向外侧突出的外旋钮86c、从向下延伸部86d向前突出的第一突起86e、从轴部86a的附近向前突出的第二突起86f、从向下延伸部86d向外侧突出的弹簧接收部86g以及两个推动部86h。外旋钮86c嵌合在形成于副锁定杆82的下端的引导孔82b中。当副锁定杆82摆动时,锁定杆86通过外旋钮86c摆动。锁定杆86可以移位到用于将打开连杆80从锁定位置切换到解锁位置的作用位置以及不切换打开连杆80的非作用位置。锁定杆86由凸轮环76或副锁定杆82驱动。
66.弹簧接收部86g抵接弹簧100的屈曲部100a并且副锁定杆82摆动,因此弹簧接收部86g通过在使屈曲部100a弹性变形的同时跨越过屈曲部100a而配置在锁定位置和解锁位置中的任一者。因此,副锁定杆82可以采取图6所示的锁定姿势和解锁姿势(参照图8的(b))中的任一者。
67.第一突起86e被第一倾斜壁77c推出。因此,锁定杆86沿顺时针方向旋转。第二突起86f被第二倾斜壁76d推出。因此,锁定杆86沿逆时针方向旋转。第二突起86f可以进入凸轮环76的侧面和第一倾斜壁77c之间的间隙。两个推出部86h从下方支撑辅助杆88。
68.如图5所示,辅助杆88如锁定杆86地由轴部86a枢转地支撑,并且包括向前突出的臂88a和设置在臂88a的前端上方的圆弧突起88b。圆弧突起88b具有可与保持壁76e(参照图6)接合的形状。辅助杆88被弹簧88c相对于锁定杆86沿逆时针方向施力,并且辅助杆88的下表面抵接被支撑的推动部86h。
69.接下来,将说明锁定机构46的作用。
70.图7示出了用于说明当凸轮环76正转时锁定机构46的操作的图,其中,(a)是示出凸轮环76处于基准位置的基本状态的图,(b)是示出凸轮环76略微从基准位置正转的状态的图,(c)是示出凸轮环76从基准位置正转大约40
°
的状态的图,(d)是示出凸轮环76从基准位置正转大约90
°
的状态的图,(e)是示出凸轮环76从基准位置正转大约190
°
的状态的图,以及(f)是示出凸轮环76从基准位置正转大约250
°
的状态的图。图7示出了从内侧观察的锁定机构46并且凸轮环76的正转方向为顺时针方向的图。
71.从图7的(a)所示的基本状态起,通过马达94的作用,凸轮环76正转。如图7的(b)所示,当凸轮环76略微旋转时,凸轮76b抵接凸轮杆78的下表面78d并且开始沿逆时针方向驱动凸轮杆78。如图7的(c)所示,当凸轮环76旋转大致40
°
时,凸轮76b的半径扩大开始部76ba抵接打开杆84的凸轮受动部84b并且开始沿逆时针方向驱动打开杆84。如图7的(d)所示,当凸轮环76旋转大致90
°
时,凸轮76b的最大直径圆弧部76bb到达凸轮杆78的下表面78d并且
凸轮杆78在逆时针方向上被最大地移位,之后,维持最大移位直到图7的(f)所示的状态。当凸轮杆78被最大地移位时,打开连杆80通过旋钮78c被推出并摆动以到达解除闩锁位置。然而,在该情况下,副锁定杆82、锁定杆86以及辅助杆88不操作并且维持图7的(a)所示的姿势。
72.另外,当打开杆84沿逆时针方向旋转时,棘轮操作部84c抵接棘轮杆56的受动部56a并向上推动受动部56a。当受动部56a被向上推动时,棘轮杆56开始围绕轴线枢转。
73.如图7的(e)所示,当凸轮环76旋转大致190
°
时,打开杆84沿逆时针方向被驱动并且棘轮操作部84c向上推动棘轮杆56的受动部56a。大致在此时,打开杆84开始作用在棘轮保持器54(参照图4)上并且开始解除闩锁操作。
74.如图7的(f)所示,当凸轮环76大致旋转250
°
时,凸轮76b的最大直径圆弧部76bb到达凸轮受动部84b并且打开杆84在逆时针方向上被最大地移位,因此棘轮杆56的受动部56a被充分地向上推动并且闩锁机构44对撞针解除闩锁。因此,门被打开。然后,通过停止对马达94的供电,凸轮环76通过弹簧76c(参照图6)的作用而沿逆时针方向枢转并且锁定机构46返回图7的(a)所示的基本状态。
75.在这种电动释放时,如图7的(a)至图7的(f)所示,通过使打开杆84在马达94的作用下旋转并作用在闩锁机构44上,可以对撞针解除闩锁。
76.图8示出了用于说明当凸轮环76反转和正转时锁定机构46的操作的图,其中,(a)是示出凸轮环76处于基准位置的基本状态的图,(b)是示出凸轮环76从基准位置反转大约40
°
的状态的图,(c)是示出凸轮环76从(b)的状态开始正转大约40
°
的状态的图,以及(d)是示出凸轮环76从(c)的状态开始正转大约40
°
的状态的图。图8示出了从外侧观察锁定机构46并且凸轮环76的反转为顺时针方向的图。
77.从图8的(a)所示的基本状态起,凸轮环76通过马达94的作用反转。如图8的(b)所示,当凸轮环76反转大约40
°
时,凸轮环76的第二倾斜壁76d按压第二突起86f。因此,锁定杆86沿逆时针方向枢转并且弹簧接收部86g跨越弹簧100的屈曲部100a并且移位到预定倾斜位置。随着锁定杆86枢转,副锁定杆82被外旋钮86c驱动并沿顺时针方向枢转,打开连杆80被内旋钮86i驱动并沿逆时针方向枢转,另外,辅助杆88由推动部86h(参照图5)驱动并沿逆时针方向枢转。因此,副锁定杆82和打开连杆80处于解锁位置,并且辅助杆88的圆弧突起88b移位到靠近圆筒77a的位置。
78.如图8的(c)所示,当凸轮环76从图8的(b)的状态正转大约40
°
时,凸轮环76返回图8的(a)所示的位置。然而,由于弹簧接收部86g被屈曲部100a保持,所以锁定杆86、副锁定杆82和打开连杆80维持图8的(b)所示的姿势。因此,锁定机构46处于解锁状态。
79.在该情况下,圆弧突起88b开始与凸轮环76的保持壁76e的内径侧面接合,并且辅助杆88维持图8的(b)所示的姿势。
80.如图8的(d)所示,当凸轮环76从图8的(c)的状态进一步正转大约40
°
时,第一倾斜壁77c按压第一突起86e。因此,锁定杆86沿顺时针方向枢转,弹簧接收部86g跨越弹簧100的屈曲部100a,返回图8的(a)所示的位置。随着锁定杆86的枢转,副锁定杆82由外旋钮86c驱动并且沿逆时针方向枢转,打开连杆80由凸轮杆78(参照图7)驱动并且沿顺时针方向枢转。因此,副锁定杆82和打开连杆80分别返回图8的(a)所示的状态。
81.另一方面,由于圆弧突起88b与凸轮环76的保持壁76e的内径侧面接合,所以辅助
杆88维持图8的(d)所示的姿势。然后,当凸轮环76进一步正转时,圆弧突起88b的逆时针侧端部最终抵接保持壁76e的逆时针侧闭合面并且限制旋转。这防止了凸轮环76的过度旋转。然后,当凸轮环76反转到图8的(a)所示的位置时,圆弧突起88b与保持壁76e之间的接合被释放,使得辅助杆88通过弹簧88c的弹性力沿顺时针方向枢转,因此辅助杆88返回图8的(a)所示的位置。以此方式,锁定机构46整体上返回到图8的(a)所示的基本姿势。以此方式,在门闩锁装置10中,单个马达94可以释放闩锁机构44的啮合并且可以在锁定机构46的使手动释放部件的操作失效的锁定状态和使手动释放部件能够操作的解锁状态之间切换。
82.返回图3,除了上述马达94之外,门闩锁装置10中的电气部件的示例还包括检测闩锁12的状态的闩锁位置开关102、检测副锁芯杆92的旋转状态的锁芯杆位置开关104以及经由臂98检测锁定机构46的状态的第一锁定位置开关106和第二锁定位置开关108。闩锁位置开关102被构造为使得闩锁机构44的闩锁12在半闩锁位置和全闩锁位置之间切换。
83.尽管马达94、锁芯杆位置开关104、第一锁定位置开关106和第二锁定位置开关108共同地置于电气部件区域42,但是闩锁位置开关102连接到从电气部件区域42延伸的两根母线110a、110b,以便置于闩锁12附近。母线110a和110b由板112保持。
84.图9是从外侧斜前方观察的电气部件、收纳电气部件所需的部件等的分解立体图,图10是从斜前方内侧倾斜地观察的电气部件、收纳电气部件所需的部件等的分解立体图。
85.如图9和图10所示,门闩锁装置10包括被构造成控制马达94的门锁ecu 2。门锁ecu 2包括印刷线路板120、配置在印刷线路板120上的微计算机200以及连接到印刷线路板120的电容器202。门锁ecu 2可以控制多个马达。凹部122形成在壳体20的外表面的上部并且位于与电气部件区域42的背侧相对应的区域中。凹部122通过利用上述第二盖24覆盖外表面而形成第二收容空间124。即,在壳体20的上部,第二收容空间124设置在凹部122的底板122b的外侧,并且第一收容空间36设置在凹部122的底板122b的内侧。门锁ecu 2收容在第二收容空间124中。壳体20的凹部122的边缘与第二盖24之间设置有外部防水密封件126,使外部与第二收容空间124之间的空间防水。通过将带状密封材料切割成预定长度来获得外部防水密封件126,并且不需要专用成型品。外部防水密封件126的下端部被配置为略微重叠。
86.印刷线路板120包括朝向外侧直立的引脚128、130、132、134和136(以下,还统称为引脚p)、通过覆盖引脚p的根部周围来相对于印刷线路板120支撑引脚的引脚保持器138、140、142、144和146(以下,还统称为引脚保持器h)以及两个定位孔147a和147b。引脚保持器h具有适当的强度,并且可以按压后述的内部防水密封件b。另外,引脚保持器h具有适当的弹性并且对插入的引脚p有密封作用。引脚保持器h由树脂制成,并且例如是由聚缩醛制成的成型品。
87.两个引脚128连接到马达94。三个引脚130连接到第一锁定位置开关106和第二锁定位置开关108。三个引脚132连接到锁芯杆位置开关104。两个引脚134经由母线110a和110b连接到闩锁位置开关102。多个引脚136从第一盖22的端子壁30a中的孔向内突出并且成为联接器30的一部分。引脚p焊接在印刷线路板120的背面上。
88.引脚保持器138保持两个引脚128,引脚保持器140串联保持三个引脚130。引脚保持器142串联保持三个引脚132,引脚保持器144保持两个引脚134,引脚保持器146以两列保持多个引脚136。
89.定位孔147a和定位孔147b设置在彼此分开的位置处。定位孔147a是圆孔,定位孔147b是指向定位孔147a的长孔,因此允许后述的定位销167a、167b的制造误差。印刷线路板120具有大致沿着第二收容空间124的不规则形状。
90.引脚孔148、150、152、154和156(以下,还统称为引脚孔a)形成在壳体20中的凹部122的底板122b中。引脚孔a在第一收容空间36和第二收容空间124之间连通。引脚128、130、132、134和136依次从引脚孔148、150、152、154和156突出到第一收容空间36中,插入设置在各电气部件上的引脚连接孔中并电连接到电气部件。各电气部件均由设置在壳体20的外表面上的保持壁165保持。在引脚保持器138、140、142、144和146的外周边缘和引脚孔148、150、152、154和156之间依次设置矩形的环状内部防水密封件158、160、162、164和166(以下,统称为内部防水密封件b)。内部防水密封件b在第一收容空间36和第二收容空间124之间防水。第二收容空间124通过外部防水密封件126和内部防水密封件b防水,并且适于收容印刷线路板120。内部防水密封件b优选地是对应于相应的引脚孔a的矩形环状,但视情况而定,非环状体的一部分可以重叠并用于外部防水密封件126。
91.底板122b还形成有两个定位销167a、167b和多个内侧基板支撑件169。定位销167a和167b插入定位孔147a和147b中并定位印刷线路板120。内侧基板支撑件169设置在沿着印刷线路板120的周围的位置并且抵接印刷线路板120的内侧面。
92.密封槽173沿着围绕凹部122的周壁122a的外周形成。外部防水密封件126配置在密封槽173中。密封槽173形成有用于以重叠的方式配置外部防水密封件126的下端部的重叠槽173a。
93.在第二盖24的内侧面上形成成对的支撑突起168、170、172、174和176。支撑突起168、170、172、174和176依次设置在面对引脚保持器138、140、142、144和146的位置处,其中印刷线路板120夹在两者之间。
94.在第二盖24的内侧面上还形成两个定位柱177a和177b、多个外基板支撑件178、密封按压突起180和可渗透膜保持器182。在定位柱177a中形成圆孔,并且在177b中形成指向定位柱177b的长孔。贯通定位孔147a、147b的定位销167a、167b插入定位柱177a、177b的孔中,定位第二盖24。
95.外基板支撑件178设置在沿着印刷线路板120的周围的位置处以及经由印刷线路板120面对内侧基板支撑件169的位置处。外侧基板支撑件178与内基板支撑件169一起夹持并保持印刷线路板120。内侧基板支撑件169和外侧基板支撑件178设置有相同的截面形状和相同的取向以便彼此面对。
96.密封按压突起180是沿着密封槽173的大致环形细突起,并且按压外部防水密封件126的外表面。外部防水密封件126通过由密封按压突起180按压和密封而起到密封作用。
97.可渗透膜保持器182是向外侧突出的筒状体并且前端具有孔。可渗透膜过滤器184从内侧附接到可渗透膜保持器182。可渗透膜过滤器184可以防止水滴通过并且允许水蒸气通过钻孔,从而防止第二收容空间124处于高湿度状态。可渗透膜保持器182和可渗透膜过滤器184配置在第二收容空间124中的印刷线路板120下方的空间中。
98.在第二盖24的周围设置有多个螺钉孔186,通过将螺钉188拧过螺钉孔186进入设置在壳体20中的螺钉柱190而将第二盖24固定到壳体20。
99.在第一盖22周围设置有多个钩192,通过使钩192与设置在壳体20中的爪194接合
而将第一盖22固定到壳体20。在第一盖22和第二盖24附接到壳体20之后,从上方附接防水盖26。
100.在壳体20和第一盖22之间形成的第一收容空间36不是完全防水的,而是所谓的防滴结构。原因是收容在第一收容空间36中的各部件都具有防滴结构。另一方面,如上所述,由于精密电子部件等安装在印刷线路板120上,所以第二收容空间124通过外部防水密封件126和内部防水密封件b而具有防水结构。
101.微计算机200包括中央处理单元(cpu)、诸如rom和ram的存储器和接口(i/f)。门锁ecu 2经由连接到联接器30(参照图1)的线束连接器(未示出)连接到设置在车辆主体侧的电池(例如,12v电池),并且通常通过来自电池的电力驱动马达94。来自设置在门内侧的内侧解除闩锁开关和内侧锁定开关的信号、来自设置在门外侧的外侧解除闩锁开关的信号等输入到门锁ecu 2。当从内侧解除闩锁开关和外侧解除闩锁开关输入预定信号时,门锁ecu 2通过电动释放部件对撞针解锁并打开门。当从内侧锁定开关输入预定信号时,锁定机构46切换到锁定状态或解锁状态。
102.随后,将参照图3、图11和图12详细说明设置在印刷线路板120上的电容器202。图3是示出上述的图1的门闩锁装置10的内部的侧视图。更具体地,图3是沿着内外方向(车辆的车宽方向)从车辆内侧观察的门闩锁装置10的内部的图。图11是搭载有电容器202的印刷线路板120的正面图,更具体地,图11是从车辆内侧观察的印刷线路板120的图。图12是沿着图3的线a-a截取的截面图,更具体地,图12是沿着前后方向从车辆的前方观察的沿着图3的线a-a截取的截面图。
103.如图11所示,在印刷线路板120中,电容器202配置在内侧面的前方上部。电容器202可以是一个,优选的是多个电容器并联电连接。与设置一个具有大电容量的电容器相比,使用多个电容器改善了配置的自由度。另外,通过并联电连接多个电容器,必要的电容量可以由多个电容器的电容量的合计(合成电容量)来提供。在本实施方式中,印刷线路板120上设置有三个电容器202。
104.电容器202被构造为能够作为应急供电部件对马达94供电。诸如在车辆碰撞事件中,当不能从马达94的电池正确地供电时,由电容器202中储存的电力使锁定机构46从锁定状态变为解锁状态。因此,即使当来自电池的电力供应被切断而锁定机构46处于解锁状态时,乘员也可以通过手动释放机构的释放操作离开车辆。
105.可以采用电解质电容器、陶瓷电容器、膜电容器等作为电容器202,并且电解质电容器是优选的。电容器202仅需要能够存储足够的电力以在紧急时将锁定机构46从锁定状态变为解锁状态。当电容量过小时,锁定机构46不能从锁定状态变为解锁状态,并且当电容量过大时,电容器202大型化。电容器202的可放电时间优选地为50ms以上且1s以下,并且更优选地为100ms以上且500ms以下。电容器202的电容量(在多个情况下为合成电容量)优选地为50μf以上且200μf以下,更优选地为80μf以上且150μf以下。
106.电容器202与印刷线路板120一起配置在第二收容空间124的电容器收容部125中。电容器收容部125凹入第二收容空间124的凹部122中。更具体地,作为分隔第一收容空间36和第二收容空间124的分隔壁的底板122b的一部分从第二收容空间124朝向第一收容空间36突出,并且第二收容空间124以使得形成电容器收容部125的方式变得比其它区域宽。即,第二收容空间124的电容器收容部125在内外方向上的宽度大于第二收容空间124的其它区
域。
107.以此方式,由于体积较大的电容器202配置在从第二收容空间124朝向第一收容空间36凹陷的电容器收容部125中,所以门闩锁装置10可以小型化。因此,可以将门闩锁装置10配置在门中而不阻碍窗玻璃的轨迹。优选的是,电容器202以长度方向面对内外方向的方式配置在电容器收容部125中。例如,当电容器202为圆柱形状时,优选的是电容器202以圆柱的高度方向面对内外方向的方式配置在电容器收容部125中。
108.另外,当如图3所示从内外方向观察时,在保持马达94的位于前方的保持壁165(以下,保持壁165将被称为划分壁196)夹在电容器202和马达94之间的情况下,以邻近马达94的方式配置电容器202,并且当如图12所示从前后方向观察时,电容器202被配置为使得电容器202的至少一部分在内外方向上与马达94重叠。以此方式,以当从内外方向观察时彼此邻近的方式将具有大体积的马达94和电容器202配置为交错状态,并且马达94和电容器202的至少一部分配置为当从前后方向观察时彼此重叠。因此,可以进一步抑制门闩锁装置在划分壁196的高度方向上的尺寸(内外方向上的宽度)。
109.另外,当如图3所示从内外方向观察时,在马达94夹在电容器202和机械机构38之间的情况下,电容器202和机械机构38配置在相反两侧。即,电容器202配置在马达94的前方,机械机构38配置在马达94的后方。以此方式,在马达94夹在电容器202和机械机构38之间的情况下,通过将电容器202配置在与具有大量部件的机械机构38的相反侧,可以进一步抑制门闩锁装置10在划分壁196的高度方向上的尺寸(内外方向上的宽度)。
110.尽管以上参照附图说明了各种实施方式,但不言而喻,本发明不限于这些示例。显然,本领域技术人员可以在权利要求的范围内提出各种变更例或修改例,当然应当理解这些也属于本发明的技术范围。另外,只要不偏离本发明的主旨,可以任意组合上述实施方式中的部件。
111.例如,在上述实施方式中,作为蓄电体例示了电容器202,但蓄电体不限于电容器202,也可以使用不具有电介质的电容器。
112.另外,本实施方式的电容器收容部125被形成为在上下方向上比在前后方向上长,但本发明不限于此。电容器收容部125可以被形成为在前后方向上比在上下方向上长,或者可以设置多个电容器收容部125。在本实施方式中,通过将多个电容器202配置在单个电容器收容部125中,可以防止印刷线路板120的结构变得复杂。
113.此外,在本说明书中至少说明了以下事项。与上述实施方式的部件等相对应的部件等被示出在括号中,但本发明不限于此。
114.(1)一种门闩锁装置(门闩锁装置10),其设置在车辆的门中,并且通过对设置在车辆本体侧的撞针闩锁和解除闩锁来关闭和打开门,门闩锁装置包括:马达(马达94);由马达驱动的机械机构(机械机构38);用于控制马达的门锁ecu(门锁ecu 2);以及用于收容马达、机械机构和门锁ecu的壳体(壳体20),其中,门锁ecu包括印刷线路板(印刷线路板120)和连接到印刷线路板的蓄电体(电容器202),其中,壳体具有:分隔壁(底板122b);第一收容空间(第一收容空间36),其用于在分隔壁的一侧收容马达和机械机构;以及第二收容空间(第二收容空间124),其用于在分隔壁的另一侧收容印刷线路板和蓄电体,其中,分隔壁设置有从第二收容空间朝向第一收容空间凹陷的蓄电体收容部(电容器收容部125),其中,蓄电体置于蓄电体收容部中。
115.根据(1),由于具有较大体积的蓄电体置于从第二收容空间朝向第一收容空间凹陷的蓄电体收容部中,所以可以使门闩锁装置小型化。因此,可以将门闩装置配置在门内而不阻碍窗玻璃的轨迹。
116.(2)根据(1)所述的门闩锁装置,其中,当从正交于分隔壁的第一方向(内外方向)观察时,在划分壁(划分壁196)从夹在蓄电体和马达之间的分隔立设的情况下,蓄电体和马达被配置为彼此邻近。
117.根据(2),当从与分隔壁正交的第一方向观察时,具有大体积的马达和蓄电体以彼此邻近的方式配置为交错状态,以此方式可以抑制门闩锁装置在划分壁的高度方向上的尺寸。
118.(3)根据(2)所述的门闩锁装置,其中,机械机构包括:闩锁机构(闩锁机构44),其用于将门保持在关闭状态;电动释放部件,其被构造为通过马达的动力释放闩锁机构;手动释放部件,其被构造为通过手动操作力释放闩锁机构;以及锁定机构(锁定机构46),其在使手动释放机构的操作无效的锁定状态和使手动释放机构能够操作的解锁状态之间切换,其中,当从第一方向观察时,在马达夹在蓄电体和机械机构之间的情况下,蓄电体配置在机械机构的相反侧。
119.根据(3),在马达夹在蓄电体和机械机构之间的情况下,通过将蓄电体配置在与具有大量部件的机械机构的相反侧,可以抑制门闩锁装置在划分壁的高度方向上的尺寸。
120.(4)根据(1)至(3)中任一项所述的门闩锁装置,其中,蓄电体和马达被配置成使得当从与分隔壁平行的第二方向(前后方向)观察时,蓄电体的至少一部分和马达的至少一部分重叠。
121.根据(4),通过将具有大体积的马达和蓄电体配置成使得当从平行于分隔壁的第二方向观察时马达的至少一部分和蓄电体的至少一部分重叠,可以进一步减小门闩锁装置在划分壁的高度方向上的尺寸。
122.(5)根据(1)至(4)中任一项所述的门闩锁装置,其中,多个蓄电体配置在蓄电体收容部中。
123.根据(5),通过利用多个蓄电体而不是一个具有大电容量的蓄电体来确保电容量,配置蓄电体的自由度高并且可以使门闩锁装置小型化。
124.(6)根据(1)至(5)中任一项所述的门闩锁装置,还包括:第一盖(第一盖22),其通过覆盖位于分隔壁的一侧的面来形成第一收容空间;第二盖(第二盖24),其通过覆盖位于分隔壁的另一侧的面来形成第二收容空间;引脚孔(引脚孔148),其设置于分隔壁中并且在第一收容空间和第二收容空间之间连通;引脚(引脚128),其从印刷线路板立设并从引脚孔突出到第一收容空间中;引脚保持器(引脚保持器138),其通过覆盖引脚的根部周围而抵靠印刷线路板支撑引脚;外部防水密封件(外部防水密封件126),其设置在壳体和第二盖之间,以对外部和第二收容空间之间的空间进行防水;以及内部防水密封件(内部防水密封件160),其设置在引脚保持器和引脚孔之间,以对第一收容空间和第二收容空间之间的空间进行防水。
125.根据(6),可以通过外部防水密封件和内部防水密封件对印刷线路板的整个表面和蓄电体进行防水。
126.(7)根据(6)所述的门闩锁装置,其中,马达经由引脚连接到印刷线路板。
127.根据(7),通过经由引脚将马达连接到印刷线路板,即使相对于印刷线路板将马达置于第一收容空间中并将蓄电体置于第二收容空间中,也能够抑制防水功能的劣化。
128.本技术基于2019年12月26日提交的日本专利申请(日本特愿2019-236973),其内容通过引用并入本文。
129.附图标记列表
130.2 门锁ecu
131.10 门闩锁装置
132.20 壳体
133.22 第一盖
134.24 第二盖
135.38 机械机构
136.44 闩锁机构
137.46 锁定机构
138.94 马达
139.120 印刷线路板
140.122b 底板(分隔壁)
141.124 第二收容空间
142.125 电容器收容部
143.126 外部防水密封件
144.160 内部防水密封件
145.128 引脚
146.138 引脚保持器
147.148 引脚孔
148.196 划分壁
149.202 电容器(蓄电体)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
