1.本公开涉及高度校正系统。
背景技术:
2.已知有使用配置在能够自行的台车之上的多关节机器人臂(以下简称为“机器人臂”)来搬运部件的机器人系统。在机器人臂的前端部设置有对部件进行把持的把持部等“前端执行器”。当台车到达目标的作业台时,机器人臂利用前端执行器来把持该部件,通过使机器人臂伸缩而使部件移动至作业台的顶板上的特定的位置,并组装于其他部件。
3.在日本特开平7-266268号公报中公开了能够进行包含机器人臂(手)的高度方向或倾斜的定位的手定位装置。手搭载于在地面上行驶的移动机器人。手定位装置利用臂前端的照相机拍摄设置在工作台表面的标记(led),并根据该图像来校正臂的高度位置。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平7-266268号公报
技术实现要素:
7.发明要解决的课题
8.在将所搬运的部件组装于其他部件时,要求以预先确定的精度使部件移动至作业台的顶板上的该其他部件的位置。机器人系统的制造商例如在机器人系统出厂前在本公司工厂内确认精度。在该出厂前检查中,典型的是在水平的地面设置台车和作业台。
9.另一方面,根据机器人系统实际导入的环境(例如交货目的地的工厂),有可能存在设置有作业台的地面和/或供台车行驶的地面不是完全水平的情况。在这样的环境下,即使在应该使机器人臂水平移动的情况下,实际上机器人臂也会远离或者接近作业台的顶板。对于机器人臂,要求校正高度方向的位置,将位置偏移抑制在预先确定的精度以内。
10.用于解决课题的手段
11.在例示性的实施方式中,本公开的高度校正系统具有:第1地面上的作业台;第2地面上的台车;多关节机器人臂,其设置在所述台车上,并且该多关节机器人臂在前端部具有前端执行器;存储装置,其存储有预先准备的校正表;以及控制器,其利用所述校正表来校正由所述第1地面的倾斜和/或所述第2地面的倾斜引起的从所述作业台的上表面到所述前端执行器的高度的偏差,使所述多关节机器人臂针对所述作业台的上表面的工件进行动作,其中,在所述校正表中,将所述作业台设置于第1基准地面且所述台车设置于第2基准地面并且所述多关节机器人臂以给定的基准动作参数进行动作时的、从所述作业台的上表面的至少一部分的区域内的多个位置分别到各所述位置的正上方的所述前端执行器的高度与各所述位置对应地进行保存,并且,所述校正表分别保存从在所述作业台的上表面预先定义的至少3个基准位置到各基准位置正上方的所述前端执行器的基准高度,所述控制器执行如下动作:从所述作业台的上表面检测所述至少3个基准位置;使所述多关节机器人臂
以所述基准动作参数进行动作,测量从检测出的各所述基准位置到所述前端执行器的高度;以及根据针对各所述基准位置而测量出的所述高度与保存在所述校正表中的各所述基准位置处的所述基准高度的偏差量来校正所述基准动作参数,由此针对所述作业台的上表面的各所述位置,校正由所述第1地面的倾斜和/或所述第2地面的倾斜引起的从所述作业台的上表面到所述前端执行器的高度的偏差。
12.发明效果
13.即使在臂侧和作业台侧双方的倾斜可能变化的环境下,也能够提高作业时的臂高度位置的精度。
附图说明
14.图1是机器人系统1的外观图。
15.图2是机器人系统1的主要是控制装置200的硬件框图。
16.图3是示出设置于用于生成校正表230的环境的机器人系统1的图。
17.图4是示出所生成的校正表230的具体例的图。
18.图5是示出保存有机器人臂a设置于水平面时的机器人臂a的高度方向的歪斜的测量结果的表的一例的图。
19.图6是示出保存有供台车300行驶的地面faref的倾斜的测量结果的表的一例的图。
20.图7是示出保存有设置有作业台u的地面furef的倾斜的测量结果的表的一例的图。
21.图8是示出导入到特定的环境的机器人系统1的图。
22.图9是设置在工作环境中的机器人系统1的立体图。
23.图10是示出供台车300行驶的地面fa1的每个位置的倾斜的图。
24.图11是示出设置有作业台u的地面fu1的每个位置的倾斜的图。
25.图12是示出作业台u的顶板utop上的3个位置p1、p2以及p3的图。
26.图13是示出3个基准位置p1、p2以及p3处的前端执行器100的高度的测量结果的例子的图。
27.图14是示出差分结果的例子的图。
28.图15是用于说明平面近似的图。
29.图16是示出通过平面近似求出的、构成格子点的各位置处的到前端执行器的高度的差分的例子的图。
30.图17是示出控制器210的处理的过程的流程图。
31.图18是示出获取主作业台mu的特性数据的机器人系统2的图。
32.图19是示出保存有主作业台mu的歪斜的测量结果的表的一例的图。
33.图20是示出组合了新臂na和主作业台mu而得的机器人系统3的图。
34.图21是示出保存有新臂na的歪斜的测量结果的表的一例的图。
35.图22是示出组合了主机器人臂ma和新作业台nu而得的机器人系统4的图。
36.图23是示出保存有新作业台nu的歪斜的测量结果的表的一例的图。
37.图24是示出设置于作业台u的双轴自动测角台400和微型计算机500的图。
38.图25a是双轴自动测角台400的外观图。
39.图25b是双轴自动测角台400的外观图。
40.图26是示出控制双轴自动测角台400的微型计算机500的处理的过程的流程图。
具体实施方式
41.以下,参照附图对本发明的高度校正系统的实施方式进行说明。以下,作为高度校正系统的实施方式,举出机器人系统来进行说明。
42.图1是机器人系统1的外观图。机器人系统1具有在前端部安装有前端执行器100的多关节机器人臂a(以下,简称为“机器人臂a”)、控制装置200、台车300以及作业台u。
43.机器人臂a除了腰部102之外,还具有关节104和106,通过使关节旋转或伸缩,使机器人臂a的姿势变化。
44.前端执行器100是以使机器人臂a能够进行作业的方式安装在机器人臂a的前端部来使用的设备。前端执行器的典型例包括把持部、螺母旋转器、焊枪以及喷枪。前端执行器能够供用户根据机器人臂a的用途而适当更换来使用。
45.控制装置200控制机器人臂a的动作。在控制装置200的上部固定有机器人臂a的腰部102。控制装置200和机器人臂a通过未图示的电源线缆、控制用线缆而连接。
46.台车300是载置机器人臂a和控制装置200而移动的装置。在本实施方式中,台车300是具有产生用于移动的驱动力(traction)的车轮并自动行驶的无人搬运车。自动行驶包括基于通过通信连接无人搬运车的计算机的运行管理系统(未图示)的指令的行驶和利用无人搬运车所具备的控制装置(未图示)进行的自主行驶。并且,在本实施方式中,控制装置200与台车300通过未图示的控制用线缆而连接,台车300也能够根据来自控制装置200的指令而行驶。
47.在自主行驶中,不仅包含无人搬运车沿着规定的路径而朝向目的地的行驶,还包含追随追踪目标的行驶。另外,无人搬运车也可以临时进行基于作业者的指示的手动行驶。
[0048]“自动行驶”通常可以包括“引导式”的行驶和“无引导式”的行驶双方。“引导式”是指连续或断续地设置诱导体,利用诱导体来引导无人搬运车的方式。“无引导式”是指不设置诱导体而进行引导的方式。本公开的实施方式中的台车300具有自身位置估计装置,能够以无引导式进行行驶。
[0049]“自身位置估计装置”是根据由激光测距仪等外界传感器获取的传感器数据来估计环境地图上的自身位置的装置。“外界传感器”是感测移动体的外部的状态的传感器。外界传感器例如有激光测距仪(也称为测域传感器)、照相机(或图像传感器)、lidar(light detection and ranging:光检测和测距)、毫米波雷达以及磁传感器。
[0050]
台车300能够通过所谓的“slam(simultaneous localization and mapping:同时定位和映射)”技术而同时进行自身位置估计和环境地图制作。
[0051]
作业台u具有顶板utop。在本说明书中,有时将顶板utop称为“作业台u的上表面”。机器人臂a在顶板utop上进行作业。例如,机器人臂a将由前端执行器100把持的工件(部件)组装在载置于顶板utop上的部件上。或者,机器人臂a将由前端执行器100把持的部件载置于顶板utop的规定的位置。
[0052]
在机器人系统1中,台车300在地面fa上行驶,作业台u设置在地面fu上。另外,在本
实施方式中,对作业台u固定地设置在地面fu上的情况进行说明,但作业台u也可以具有产生用于移动的驱动力的车轮而自动行驶。
[0053]
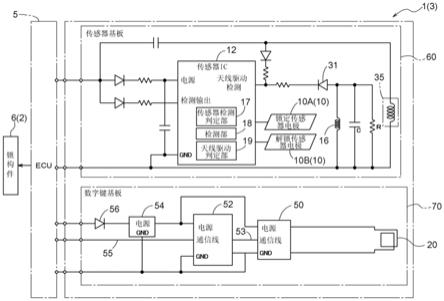
图2是机器人系统1的主要是控制装置200的硬件框图。控制装置200具有控制器210和存储装置220。控制器210是所谓的计算机,例如具有未图示的cpu、内部存储器(缓存器、寄存器)、用于与机器人臂a和台车300之间分别收发数据的通信端子。
[0054]
存储装置220例如是ram。存储装置220保存有校正表230。校正表230是使机器人臂a在规定的环境下进行动作而预先测量出的、将位置与高度对应起来的表。校正表的生成方法的详细内容在后面说明。
[0055]
在机器人系统1从制造商出货而实际导入到例如交货目的地的工厂内时,控制装置200的控制器210能够使用在导入的环境下获取的数据和校正表230,通过后述的过程能够校正机器人臂a的高度方向的偏移。
[0056]
关于图2所示的机器人臂a和台车300,省略具体的内部硬件的结构的记载和说明。机器人臂a和台车300只要分别具有公知的机器人臂和无人搬运车(所谓的agv)的硬件结构即可。通过这样的硬件结构,机器人臂a和台车300分别能够按照来自控制装置200的控制器210的指令进行动作。
[0057]
接着,参照图3至图7对校正表230的具体例和生成校正表230的过程进行说明。
[0058]
图3示出了设置于用于生成校正表230的环境的机器人系统1。典型的是,图3所示的机器人系统1设置在机器人系统1的制造商的检查工厂中。作为其他例子,机器人系统1也可以在临时设置于交货目的地工厂等之后,移设于工厂内的不同的位置。
[0059]
在用于生成校正表230的环境下,预先知道设置有作业台u的地面furef和供台车300行驶的地面faref。因此,能够预先获取地面furef的倾斜和地面faref的倾斜,能够利用所获取的倾斜来生成校正表230。另外,在本说明书中,有时将设置有作业台u的地面furef称为“第1基准地面”,将供台车300行驶的地面faref称为“第2基准地面”。
[0060]
如图3所示,取x轴和y轴,与以下说明的校正表230的横轴和纵轴对应。
[0061]
图4示出了所生成的校正表230的具体例。校正表230的右方向对应于图3的 x方向,下方向对应于图3的 y方向。
[0062]
对图4所示的校正表230所表示的含义进行说明。首先,在作业台u的顶板utop上,将由x坐标和y坐标确定的多个位置设定为格子点状。使机器人臂a进行动作以使前端执行器100来到各格子点的正上方150mm的高度,测量此时的实际的高度。“正上方”不限于与作业台u的顶板utop垂直。是从各格子点沿铅垂方向观察时在上方的意思。
[0063]
在表示格子点的坐标位置记述了测量出的高度的表是校正表230。即,校正表230是将按照与作业台u的关系使机器人臂a实际动作时的顶板utop上的位置与此时的前端执行器100的高度对应地进行保存的表。例如,在坐标(-10,-10)的位置处,本来应该是150mm的高度,但意味着在该机器人系统1中为149.6196mm。另外,坐标位置和150mm这样的数值是一个例子。根据作业台u的顶板utop的大小、前端执行器100所需的作业位置,能够适当地变更坐标的获取方法和高度。
[0064]
在校正表230中反映了影响机器人系统1的高度方向的动作精度的各种主要原因。具体而言,在校正表230中,反映了(1)机器人臂a的高度方向的精度的偏差、(2)供台车300行驶的地面faref的倾斜以及(3)设置有作业台u的地面furef的倾斜。机器人臂a的高度方
向的精度的偏差还可能包含机器人臂a的腰部102固定于控制装置200时的倾斜、机器人臂a的各关节的动作精度的偏差。
[0065]
为了生成校正表230,独立地获取上述的主要原因(1)~(3)。
[0066]
图5示出了保存有机器人臂a设置于水平面时的机器人臂a的高度方向的歪斜的测量结果的表的一例。在使设置有作业台u的地面和供台车300行驶的地面双方与水平面一致的状态下,测量前端执行器100距顶板utop的高度。在测量高度时,例如考虑利用安装于前端执行器100附近的激光测距装置(未图示)的方法。
[0067]
控制器210使前端执行器100依次移动到例如坐标(5
·
m,5
·
n)(m:-2到2的整数,n:-2到2的整数)的上方150mm的位置。每当位置改变时,激光测距装置测量使机器人臂a以从顶板utop移动到150mm的高度的方式进行动作时的、从与各位置对应的前端执行器100到顶板utop的高度。在这样获取到的高度的测量结果中,没有地面的倾斜的影响,仅反映了机器人臂a的高度方向的歪斜。
[0068]
图6示出了保存有供台车300行驶的地面faref的倾斜的测量结果的表的一例。另外,图7示出了保存有设置有作业台u的地面furef的倾斜的测量结果的表的一例。这些表示位置(x,y)处的相对于水平面的高度方向的偏差量。在比水平面高的情况下被赋予正值,在比水平面低的情况下被赋予负值。
[0069]
将位置(x,y)处的表示主要原因(1)的表(图5)的值表示为“v1(x,y)”,将表示主要原因(2)的表(图6)的值表示为“v2(x,y)”,将表示主要原因(3)的表(图7)的值表示为“v3(x,y)”。于是,校正表230的值v(x,y)通过以下的式子来计算。
[0070]
(式1)
[0071]
v(x,y)=v1(x,y) v2(x,y)-v3(x,y)
[0072]
另外,在本实施方式中,假定作业台u的顶板utop是凹凸少到能够忽略的程度的平坦面。然而,在顶板utop上存在无法忽略的凹凸,为了机器人臂a的前端执行器100的对位而需要考虑的情况下,也可以进一步考虑对顶板utop的每个位置的凹凸进行测量而得到的表,来生成校正表230的值v(x,y)。
[0073]
通过以上的考虑方法和过程,能够预先准备校正表230。在本说明书中,有时将构成校正表230的每个坐标的高度称为该坐标下的“基准高度”。另外,在本实施方式中,有时将多个坐标中的至少3个坐标称为“基准位置”。基准位置的坐标例如为(-10,-10)、(-10,10)以及(10,10),均采用顶板utop的端部的位置。在校正表230中,关联有与基准位置对应的高度。“基准高度”和“基准位置”在后面进行说明。
[0074]
接着,对在机器人系统1实际导入的环境下用于使机器人臂a在高度方向上高精度地进行动作的高度校正方法进行说明。
[0075]
为了校正高度,事先获取规定的数据。
[0076]
图8示出了导入到特定的环境中的机器人系统1。图9是设置在工作环境中的机器人系统1的立体图。图8所示的点划线表示水平面。为了表示是与图1不同的环境,在图8和图9中,稍微强调并记载了供台车300行驶的地面fa1和设置有作业台u的地面fu1倾斜。即,地面fa1与地面fa(图1)不同,地面fu1也与地面fu(图1)不同。另外,地面fa1或地面fu1的一方的倾斜也可以与图1的例子不同。除了地面的倾斜以外,与图1的例子相同。由于图1所示的作业台u和机器人臂a直接导入到不同的环境,因此在图8的机器人系统1中,机器人臂a的高
度方向的精度的偏差与图1的机器人系统1相同。
[0077]
在导入了机器人系统1的环境中,能够测量供台车300行驶的地面fa1的倾斜和设置有作业台u的地面fu1的倾斜。在本实施方式中,设置者分别独立地求出地面fa1的倾斜和地面fu1的倾斜,并将该数据保存在控制装置200的存储装置220中。
[0078]
图10示出了供台车300行驶的地面fa1的每个位置的倾斜,图11示出了设置有作业台u的地面fu1的每个位置的倾斜。根据图10的例子,供台车300行驶的地面fa1以越靠近前(越向 y方向)越高的方式倾斜。另一方面,根据图11的例子,设置有作业台u的地面fu1的倾斜以越靠右手(越向 x方向)越高的方式倾斜。
[0079]
接着,在导入的环境下测量机器人臂a的高度。在生成校正表230时,按格子点状的每个位置测量高度(图5)。但是,这里,只要测量至少3个位置处的高度即可。以下,对由控制装置200自动进行的例子进行说明。
[0080]
图12示出了作业台u的顶板utop上的3个位置p1、p2以及p3。这里所说的3个位置p1、p2以及p3与在上述的校正表230中与高度相对应的基准位置相同。因此,以下也称为基准位置p1、p2以及p3。基准位置p1、p2以及p3的各坐标为(-10,-10)、(-10,10)以及(10,10)。
[0081]
控制装置200的控制器210从顶板utop检测上述的3个基准位置。作为检测方法的一例,控制器210只要利用未图示的摄像装置来拍摄顶板utop,并将从所获取的图像中识别出的顶板utop的3个角(端部)决定为基准位置p1、p2以及p3即可。
[0082]
控制器210使多关节机器人臂进行动作,测量从检测出的各基准位置到前端执行器的高度。作为测量方法的一例,控制器210与生成图5所示的表时同样地能够使用激光测距装置(未图示)。
[0083]
图13示出了3个基准位置p1、p2以及p3处的前端执行器100的高度的测量结果的例子。
[0084]
控制器210根据针对各基准位置而测量出的高度与保存在校正表230中的各基准位置处的所述基准高度的偏差量来校正高度的偏差。以下,具体地进行说明。
[0085]
为了使机器人臂a进行动作,控制器210预先保存有“基准动作参数”。考虑使前端执行器100移动到某个特定的三维坐标位置的例子。控制器210指定腰部102的马达的旋转方向及旋转角的大小、分别设置于多个关节的马达的旋转方向及旋转角的大小,并作为控制量发送至机器人臂a。机器人臂a根据接收到的控制量使各马达沿指定的旋转方向旋转指定的角度。为了使前端执行器100移动到这样的期望的三维坐标位置而决定机器人臂a的姿势的控制量为“基准动作参数”。在本实施方式中,可以认为预先准备有用于位于顶板utop上的格子点的各位置的上方150mm的各个“基准动作参数”。
[0086]
本来,如果以基准动作参数进行动作,则应该能够使前端执行器100移动到所期望的三维坐标位置,但在因上述各种主要原因而高度方向的位置发生偏移的状况下,需要校正“基准动作参数”以成为本来的高度。通过校正“基准动作参数”,能够针对顶板utop的各位置,校正由供台车300行驶的地面fa1的倾斜和设置有作业台u的地面fu1的倾斜引起的从顶板utop到前端执行器100的高度的偏差。
[0087]
因此,控制器210计算针对3个基准位置p1、p2以及p3而获取的测量结果与校正表230中的值v的差分。图14示出了差分结果的例子。可以知晓虽然在基准位置p1(-10,-10)和p3(10,10)处没有误差,但在基准位置p2(-10,10)处产生0.4mm的误差。
[0088]
不仅针对3个基准位置,对构成格子点的各位置也求出误差,因此本技术发明人对由地面faref的倾斜和地面furef的倾斜引起的高度的偏差进行平面近似。
[0089]
图15是用于说明平面近似的图。
[0090]
若使用基准位置p1~p3的坐标值和校正表的值v,则能够得到表示三维位置的3个点。即,通过基准位置p1和基准位置p1处的校正表230的值v的组、基准位置p2和基准位置p2处的校正表230的值v的组以及基准位置p3和基准位置p3处的校正表230的值v的组,能够求出3个三维位置。将以这3个点展开的假想的平面称为“平面kref”。
[0091]
另一方面,使用基准位置p1~p3的坐标值和获取的测量结果(图13)也能够得到表示三维位置的3个点。即,根据基准位置p1和在基准位置p1处测量出的高度的组、基准位置p2和在基准位置p2处测量出的高度的组以及基准位置p3和在基准位置p3处测量出的高度的组,能够求出3个三维位置。将通过这3个三维位置而展开的假想的平面称为“平面km”。
[0092]
根据图14所示的差分,平面kref和平面km共享基准位置p1上方的坐标(-10,-10,149.6196)的点和基准位置p3上方的坐标(10,10,149.948)的点。即,平面kref和平面km以通过这2点的直线l相交。而且,可以说在基准位置p2的上方产生0.4mm的误差。
[0093]
本技术发明人在导入了机器人系统1的环境下,求出与设定于顶板utop的多个格子点的位置中的基准位置以外的n个格子点的位置对应的高度作为到平面km的高度。即,控制器210将分别通过构成格子点的该n个位置的铅垂线与假想的平面km相交的位置处的高度近似为该n个位置各自的到前端执行器的高度。
[0094]
图16示出了通过平面近似求出的、构成格子点的各位置处的到前端执行器的高度的差分的例子。当按每个位置将校正表230的值v与图16所示的差分表的值相加时,能够在新导入的环境下估计机器人臂a的高度。
[0095]
控制器210校正3个基准位置和n个位置各自的基准动作参数,以使近似的各位置处的高度接近本来需要的高度(在本实施方式中为150mm)。由此,能够针对顶板utop的各位置,校正由供台车300行驶的地面fa1的倾斜和设置有作业台u的地面fu1的倾斜引起的从顶板utop到前端执行器100的高度的偏差。
[0096]
另外,有时可以说保存在校正表230(图4)中的每个位置的高度值的精度足够高。在该情况下,也可以使控制器210校正与n个位置分别相关的基准动作参数,以使针对上述的n个各位置而近似的高度与保存在校正表230中的n个各位置处的高度的偏差量(差分)更小。
[0097]
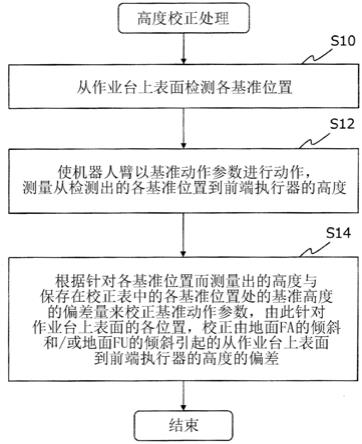
图17是示出控制器210的处理的过程的流程图。
[0098]
在步骤s10中,控制器210从作业台u的顶板utop(上表面)检测各基准位置。
[0099]
在步骤s12中,控制器210使机器人臂以基准动作参数进行动作,测量从检测出的各基准位置到前端执行器的高度。
[0100]
在步骤s14中,控制器210根据针对各基准位置而测量出的高度与保存在校正表中的各基准位置处的基准高度的偏差量来校正基准动作参数。由此,能够针对作业台上表面的各位置,校正由地面fa的倾斜和/或地面fu的倾斜引起的从作业台上表面到前端执行器的高度的偏差。
[0101]
在上述的说明中,控制器210检测3个基准位置以及对高度进行测量不是必须的,也可以使用其他方法。例如,如果能够充分确保水平方向的移动的精度,则只要能够在水平
方向上示教3个基准位置的位置,使机器人臂a在基准位置上方分别停止,则控制器210不需要检测3个基准位置。另外,也可以人为地测量3个基准位置的上方的前端执行器100的位置(高度),并发送测量结果使其保存在存储装置220中。
[0102]
至此,对设想1组机器人臂a和作业台u而制作校正表230的环境与所设置的环境不同的情况下的高度方向的校正处理的例子进行了说明。
[0103]
以下,对校正处理的2个变形例进行说明。
[0104]
作为第1变形例,以特定的机器人臂和作业台的组合为基准,对设想了机器人臂相同但组合了其他作业台的情况或者作业台相同但新组合了其他机器人臂的情况的校正处理进行说明。
[0105]
作为第2变形例,对不使机器人臂校正高度方向的位置偏移,而是使用能够调整上下方向的高度和角度的作业台的例子进行说明。
[0106]
在第1变形例中,导入“主机器人臂”和“主作业台”这样的用语。“主机器人臂”和“主作业台”是指作为组合的基准的特定的机器人臂和作业台。以下,对主机器人臂标注“ma”这样的参照标号,对主作业台标注“mu”这样的参照标号。主机器人臂ma和主作业台mu的组合的例子是图1~图3中的机器人臂a和作业台u。主机器人臂ma和主作业台mu的各硬件结构与机器人臂a和作业台u的各硬件结构相同。以下,适当标注相同的参照标号来进行说明。
[0107]
在本变形例中,对组合了与“主机器人臂”不同的其他机器人臂(新臂)和“主作业台”的情况以及组合了“主机器人臂ma”和与“主作业台mu”不同的其他作业台(新作业台)的情况的例子进行说明。
[0108]
首先,获取表示主机器人臂ma和主作业台mu各自所固有的特性的特性数据。
[0109]
主机器人臂ma的特性数据的获取方法与图5所示的表的获取方法相同。即,主机器人臂a设置于水平面时的主机器人臂a的高度方向的歪斜是主机器人臂ma的特性数据。
[0110]
另一方面,作业台mu的特性数据的获取方法如下。
[0111]
图18示出了获取主作业台mu的特性数据的机器人系统2。地面fu和fa为水平面。
[0112]
控制器210例如控制主机器人臂ma,以使前端执行器100位于顶板utop的坐标(-10,-10)的上方150mm的高度。然后,在原样维持该姿势的同时,控制器210使台车300与x方向平行地移动定量间距(例如 5)并停止,并重复执行使台车300移动并停止的动作。在每次停止时,激光测距装置测量从顶板utop到前端执行器100的高度。其结果为,获取坐标(-10,-10)、(-5,-10)、(0,-10)、(5,-10)以及(10,-10)的各坐标位置处的高度的测量结果。
[0113]
进而以同样的方式移动到在y方向上偏移了 5的位置,获取顶板utop的坐标(-10,-5)、(-5,-5)、
…
、(10,-5)的各位置处的高度的测量结果。继续进行同样的动作,直至获取到坐标(10,10)的位置处的高度的测量结果为止。
[0114]
通过地面fu和fa为水平面并且维持了主机器人臂ma的姿势,从而得到的高度的测量结果可以说反映了主作业台mu的“歪斜”。图19示出了保存有主作业台mu的歪斜的测量结果的表的一例。
[0115]
接着,对组合了新臂na和主作业台mu的情况下的高度校正处理的例子进行说明。
[0116]
图20示出了组合了新臂na和主作业台mu而得的机器人系统3。首先,控制新臂na的控制装置200获取新臂na的歪斜的测量结果。测量方法和与图5相关联地进行了说明的、使
用了机器人臂a的高度方向的歪斜的测量方法相同。在测量新臂na的歪斜时,新臂na设置在测量了主机器人臂ma的歪斜时的主机器人臂ma的位置。如上所述,在本变形例中,作为主机器人臂ma和主作业台mu的组合的例子,举出了图1~图3中的机器人臂a和作业台u。若沿用该例子,则新臂na设置于图3所示的机器人臂a的位置。另外,载置有新臂na的控制装置200和台车300不需要与图3中的载置有机器人臂a的控制装置200和台车300完全相同。
[0117]
图21示出了保存有新臂na的歪斜的测量结果的表的一例。歪斜的测量条件与图5所示的主机器人臂ma的歪斜的测量时相同。因此,图21所示的测量结果是新臂na的特性数据。将位置(x,y)处的该表的值表示为“v1
na
(x,y)”。
[0118]
如上所述,校正表230的值v(x,y)通过上述的(式1)来计算。再次揭示(式1)。
[0119]
(式1)
[0120]
v(x,y)=v1(x,y) v2(x,y)-v3(x,y)
[0121]
该式的“v1(x,y)”表示主机器人臂ma的歪斜。因此,代替“v1(x,y)”,而使用“v1
na
(x,y)”求出终止了(式1)的(式2)。
[0122]
(式2)
[0123]
vrev(x,y)=v1
na
(x,y) v2(x,y)-v3(x,y)
[0124]
能够得到这样修正后的校正表的值vrev(x,y)。另外,v2(x,y)和v3(x,y)分别表示保存有供台车300行驶的地面的倾斜的测量结果的表的值和保存有设置有主作业台mu的地面的倾斜的测量结果的表的值。需要根据设置有新臂na和主作业台mu的环境来测量。
[0125]
利用修正后的校正表对前端执行器100的高度进行校正的方法如上述那样。即,如果将上述的“机器人臂a”替换为“新臂na”,则即使在新臂na或者主作业台mu设置于不是水平面的地面的情况下,也能够校正前端执行器100的高度。
[0126]
接着,对组合了主机器人臂ma和新作业台nu的情况下的高度校正处理的例子进行说明。
[0127]
图22示出了组合了主机器人臂ma和新作业台nu而得的机器人系统4。首先,控制装置200获取新作业台nu的歪斜的测量结果。测量方法和与图18和图19相关联地进行了说明的、主作业台mu的高度方向的歪斜的测量方法相同。在测量新作业台nu的歪斜时,新作业台nu设置于测量主作业台mu的歪斜时的主作业台mu的位置。例如主作业台mu设置于图18所示的主作业台mu的位置。
[0128]
图23示出了保存有新作业台nu的歪斜的测量结果的表的一例。控制器210按每个位置计算该表的值与图19所示的保存有主作业台mu的歪斜的测量结果的表的值的差分。将所得到的差分按每个位置配置而得的差分表是以主作业台mu的特性数据为基准的新作业台nu的特性数据。将位置(x,y)处的该差分表的值表示为“v
diff
(x,y)”。
[0129]
图5所示的表是将主作业台mu和主机器人臂ma设置于水平面时的主机器人臂ma的特性数据。在代替主作业台mu而采用新作业台nu的情况下,在主机器人臂ma的高度方向的歪斜的测量结果中反映了上述新作业台nu的特性数据。换言之,通过利用上述的差分表来修正图5所示的表,能够得到将新作业台nu和主机器人臂ma设置于水平面时的主机器人臂ma的特性数据。
[0130]
具体而言,通过下述的(式3),能够得到修正后的校正表的值vrev(x,y)。
[0131]
(式3)
[0132]
vrev(x,y)=v1(x,y) v
diff
(x,y) v2(x,y)-v3(x,y)
[0133]
另外,v2(x,y)和v3(x,y)分别表示保存有供台车300行驶的地面的倾斜的测量结果的表的值和保存有设置有新作业台nu的地面的倾斜的测量结果的表的值。需要根据设置主机器人臂ma和新作业台nu的环境来测量。
[0134]
在此前的说明中,通过校正机器人臂的基准动作参数,校正了从作业台上表面(顶板)到前端执行器的高度的偏差。以下,不是对机器人臂的基准动作参数进行校正,而是具有对顶板的倾斜进行调整的机构(倾斜调整机构)的作业台对顶板的倾斜进行调整。在本实施方式中,采用双轴自动测角台作为倾斜调整机构。
[0135]
图24示出了设置于作业台u的双轴自动测角台400和微型计算机500。微型计算机500控制双轴自动测角台400(以下简称为“测角台400”),以调整作业台u的顶板utop的倾斜。
[0136]
首先,对作为倾斜调整机构的双轴自动测角台400进行说明。在采用双轴自动测角台的情况下,即使不对机器人臂的基准动作参数进行校正,也能够进行调整以使前端执行器与顶板的高度为恒定的。与顶板垂直的z轴方向的绝对高度通过机器人臂的动作来调整。
[0137]
在本实施方式中,利用例如日本特开2006-090510公报中记载的公知的双轴自动测角台。以下,对日本特开2006-090510公报的图2和图3中记载的双轴自动测角台进行说明。
[0138]
图25a和图25b是双轴自动测角台400的外观图。图25a示出了使滑动体42的顶板处于与地面平行的状态时的测角台400。图25b示出了使滑动体42的顶板倾斜的测角台400。以下,对测角台400的概要进行说明。
[0139]
测角台400是使各自在一个轴向上纵弯曲线滑动的2个载台以轴相互垂直的方式旋转90度而重叠来构成的。
[0140]
滑动体42设置成相对于轴体41纵弯曲线滑动。
[0141]
具体而言,在轴体41设置有形成有纵弯曲形状的第1负载槽47a的第1负载部构成材料47。另一方面,在滑动体42设置有形成有纵弯曲形状的第2负载槽48a的第2负载部构成材料48。第1负载槽47a和第2负载槽48a对置而形成负载路43,在该负载路43中配设有在该负载路43中滚动移动的多个滚动体(省略图示)。这些滚动体以由在负载路43中移动的板状的滚动体保持器(省略图示)保持规定的间隔的方式配设。另外,在重叠后的各载台上,在左右各一个部位设置有负载路43。
[0142]
各载台具有驱动蜗杆46的伺服马达44、承接蜗杆46的轴承45、阻止滚动体保持器脱落的止挡螺钉49。蜗杆46经由连结体与伺服马达44的驱动轴连结。蜗杆46与设置于滑动体42的下表面的螺合部(未图示)螺合。当伺服马达44驱动蜗杆46时,螺合部被向与蜗杆46的旋转方向对应的方向送出,滑动体42的倾斜发生变化。若使双方的载台的各伺服马达44按照与所期望的移动量对应的转速旋转,则能够使滑动体42的顶板的倾斜变化。移动量能够通过表示滑动体42的移动量的刻度板50而获知。
[0143]
通过将上述测角台400的顶板和作业台u的顶板utop的背面固定,能够调整顶板utop的倾斜。控制测角台400的微型计算机500与控制器210进行通信,微型计算机从控制器210接收为了进行顶板utop的倾斜的调整而所需的数据,进行各伺服马达的控制,也可以省略微型计算机500,而由控制装置200的控制器210直接进行测角台400的各伺服马达的控
制。对前者的具体例进行说明。
[0144]
考虑图15所示的状况。当前的顶板utop与假想的平面km平行。微型计算机500从控制器210获取与设想的平面km上的位置的z坐标相当的、针对基准位置p1~p3而分别测量出的高度的数据。并且,微型计算机500获取保存在校正表230中的各基准高度的偏差量的数据。然后,微型计算机500根据针对基准位置p1~p3而分别测量出的高度和偏差量,调整当前的顶板utop(假想的平面km)的倾斜,以使按照当前的基准动作参数进行了动作的机器人臂的前端执行器100的高度无论顶板utop上的位置如何均是恒定的。即,通过使用测角台400来调整顶板utop的倾斜,能够针对顶板utop的各位置,校正由设置有作业台u的地面的倾斜和/或供台车300行驶的地面的倾斜引起的从顶板utop到前端执行器100的高度的偏差。
[0145]
另外,也可以不严格地将前端执行器100的高度无论顶板utop上的位置如何均保持为恒定。例如,微型计算机500也可以调整顶板utop的倾斜,以使针对各基准位置而测量出的高度与保存在校正表中的各基准位置处的基准高度的偏差量为规定的阈值以下。本变形例的顶板utop的倾斜的调整是代替机器人臂的基准动作参数的校正的处理。其他处理可以直接在本变形例中采用。另外,实际组合的情况下的处理的说明由于重复而省略。
[0146]
图26是示出微型计算机500的处理的过程的流程图。
[0147]
在步骤s20中,微型计算机500从控制器210接收使机器人臂以基准动作参数进行动作时的从各基准位置到前端执行器的高度的测量结果。在微型计算机500不具有校正表230的情况下,微型计算机500也可以从控制器210接收校正表230。
[0148]
在步骤s22中,微型计算机500根据针对各基准位置而测量出的高度与保存在校正表中的各基准位置处的基准高度的偏差量来调整作业台上表面的倾斜。由此,微型计算机500针对作业台上表面的各位置,校正由供台车行驶的地面的倾斜和/或设置有作业台的地面的倾斜引起的从作业台上表面到前端执行器的高度的偏差。
[0149]
另外,测角台无需为双轴,也可以为三轴。在三轴的情况下,只要在高度方向(z方向)上设置上下的机构即可。例如,也可以利用线性步进马达而在z轴方向上上下移动。由于作业台侧能够调整三轴的全部,因此不需要机器人臂调整高度方向。即,不需要在机器人臂的动作程序中包含调整高度方向的处理。并且,在机器人臂侧的三轴方向的定位通过使用了其他的机械机构、力传感器的仿形动作来保障的情况下,通过示教回放,能够使机器人臂进行一定的动作,使作业台承担微调整。
[0150]
产业上的可利用性
[0151]
本发明的例示性的实施方式能够利用于具有要求高度方向的精度的机器人臂的机器人系统。
[0152]
标号说明
[0153]
a:机器人臂;fu、fa:地面;u:作业台;utop:顶板;1:机器人系统;100:前端执行器;200:控制装置;210:控制器;220:存储装置;230:校正表;300:台车;400:双轴自动测角台;500:微型计算机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。