1.本发明属于机械手臂技术领域,尤其涉及一种消防机器人用机械手臂。
背景技术:
2.随着社会的发展与进步,如今的城市高楼林立,现实生活中的安全隐患也时时刻刻的围绕在我们身边,例如我们日常生活中突发率极高的火灾,在如今一些城市,已经开始采用消防机器人进行勘探救援,在消防机器人的活动过程中,一个实用的机械手臂能够解决很多困境。
3.但是现有的机械手臂结构相对单一,现有的机械手臂在运行过程中往往会出现重心偏移,导致消防机器人重心不稳二倾倒的问题,同时,现有的机械手臂的摄像组件会随着机械手臂的偏移而偏移,使得拍摄不稳定,影响拍摄质量。
技术实现要素:
4.本发明的目的在于:为了解决中心不稳定容易失衡与摄像不稳定容易偏移的问题,而提出的一种消防机器人用机械手臂。
5.为了实现上述目的,本发明采用了如下技术方案:一种消防机器人用机械手臂,包括底座,所述底座顶部固定连接有外壳体,所述外壳体内部开设有第一腔体,所述第一腔体内壁底部通过轴承转动连接有主转轴,所述主转轴顶部固定连接有转动台,所述转动台底部固定连接有散热组件,所述转动台顶部中心位置固定连接有转柱,所述转柱内部开设有第二腔体,所述第二腔体内活动连接有配重组件,所述转柱顶部固定连接有连接座,所述连接座顶部通过第五转轴转动连接有第二连杆,所述第五转轴一端固定连接有第一驱动件,所述第二连杆远离连接座的一端通过销轴铰接有第一连杆,且销轴一端固定连接有第二驱动件,所述第一连杆一端转动连接有连接块,所述连接块底部固定连接有夹持驱动块,所述夹持驱动块一侧固定连接有拍摄组件,所述夹持驱动块底部活动连接有夹持手。
6.作为上述技术方案的进一步描述:所述拍摄组件包括连接柱,所述连接柱与夹持驱动块固定连接,所述连接柱远离夹持驱动块的一端通过第二转轴转动连接有防护外壳,所述第二转轴外表面卡接有第二齿盘,所述第二齿盘一侧通过传动链条传动连接有第一齿盘,所述第一齿盘通过第一转轴与连接柱内部开设的凹槽内壁两侧转动连接,所述第一转轴外表面卡接有连接杆,所述连接杆与连接柱底部开设的第一滑槽滑动连接,所述第一滑槽与凹槽相连通,所述连接杆底部固定连接有配重块。
7.作为上述技术方案的进一步描述:所述第一滑槽两端均设置有安装块,所述安装块与连接柱底部固定连接,所述安装块内部通过第六转轴转动连接有移动丝杠,且两个移动丝杠之间固定连接,且两个移动丝杠沿中心位置呈对称分布,且两个移动丝杠螺纹方向相反,所述移动丝杠外表面螺纹连
接有第一丝杠座,所述第一丝杠座一侧与连接柱底部相贴合,所述第一丝杠座一侧与连接杆相贴合,且第六转轴一端固定连接有第二电机,所述第二电机通过安装板与夹持驱动块一侧固定安装。
8.作为上述技术方案的进一步描述:所述防护外壳内部中心位置嵌设有摄像头,所述摄像头两侧均设置有风扇,所述摄像头上下两端均设置有照明灯,所述风扇与照明灯均嵌设于防护壳体一侧。
9.作为上述技术方案的进一步描述:所述配重组件包括固定箱,所述固定箱底部与转动台顶部固定连接,所述固定箱内壁两侧之间通过第三转轴转动连接有调整丝杠,所述第三转轴一端延伸至第二腔体内并固定连接有第三锥齿轮,所述第三锥齿轮一侧啮合有第四锥齿轮,所述第四锥齿轮通过第四转轴转动连接于第二腔体内壁,所述第四转轴一端贯穿第二腔体与连接座并固定连接有第二锥齿轮,所述第二锥齿轮顶部啮合有第一锥齿轮,所述第一锥齿轮与第五转轴相卡接。
10.作为上述技术方案的进一步描述:所述调整丝杠外表面螺纹连接有第二丝杠座,所述第二丝杠座顶部固定连接有配重水箱,所述配重水箱顶部固定连接有伸缩软管,所述伸缩软管顶部固定连接有滑动环,所述滑动环顶部转动连接有固定环,所述固定环顶部与第一腔体内壁固定连接,所述固定环顶部一侧固定连接有进出液管,所述进出液管延伸至外壳体外部。
11.作为上述技术方案的进一步描述:所述第二丝杠座底部固定连接有两个第一移动轮,所述第一移动轮与固定箱内壁底部开设的第二滑槽滑动连接。
12.作为上述技术方案的进一步描述:所述第一腔体内壁底部固定连接有第一电机,所述第一电机输出轴一端固定连接有主动轮,所述主动轮一侧通过传动带传动连接有从动轮,所述从动轮与主转轴外表面卡接。
13.作为上述技术方案的进一步描述:所述散热组件包括支撑环,所述支撑环顶部与转动台底部固定连接,所述支撑环内壁一侧固定连接有挤压块,所述挤压块一侧贴合有气囊,所述气囊与第一腔体内壁底部固定连接,所述气囊一端固定连接有多个出气管,所述出气管正对第一电机。
14.作为上述技术方案的进一步描述:所述支撑环底部固定连接有多个第二移动轮,所述第二移动轮与第一腔体内壁底部开设的第三滑槽滑动连接,所述第三滑槽横截面形状为环形。
15.综上所述,由于采用了上述技术方案,本发明的有益效果是:1、本发明中,通过设置配重组件,当第二连杆向下转动时,第二连杆带动第一锥齿轮转动,第一锥齿轮通过第二锥齿轮带动第四转轴转动,第四转轴通过第四锥齿轮带动第三锥齿轮转动,第三锥齿轮带动调整丝杠转动,调整丝杠带动第二丝杠座向第一腔体外侧移动,使中心始终保持在中心位置,从而提高了机械手臂的运行中的中心平衡,避免机械手臂因为重心失衡而影响运行,同时,通过控制配重水箱内的水的质量,能够更具不同的情况调整机械手臂的重心位置,提高机械手臂的适用性。
16.2、本发明中,通过设置拍摄组件,当夹持驱动块角度发生变化时配重块在自身重
力作用下发生转动,配重块带动第一转轴转动,第一转轴通过一齿盘带动第二齿盘转动,第二齿盘通过第二转轴带动防护外壳转动,使防护外壳始终稳定在水平状态,从而避免摄像头在火灾现场移动时不稳定而影响拍摄效果,能够提高拍摄质量,方便消防人员了解火灾现场的具体情况,提高救援效果,同时,拍摄组件通过第二丝杠座对连接杆的限位,能够使摄像头随着连接柱移动偏移,提供多种的摄像方式,方便消防人员根据实际需要进行选择。
17.3、本发明中,通过设置散热组件,支撑环带动第二移动轮在第三滑槽内滑动,支撑环带动挤压块转动,挤压块周期性气囊进行挤压,气囊受到挤压后排出空气,空气通过出气管对第一电机进行散热降温,从而能够避免第一电机因温度过高而损坏,提高了第一电机的使用寿命,同时也提高了机械手臂在高温情况下的运行流畅度。
附图说明
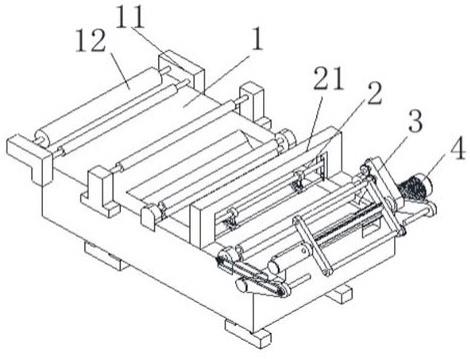
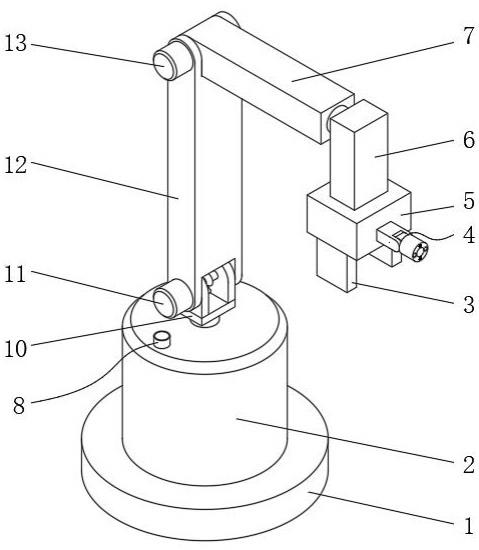
18.图1为本发明提出的一种消防机器人用机械手臂的立体结构示意图;图2为本发明提出的一种消防机器人用机械手臂的正视剖面结构示意图;图3为本发明提出的一种消防机器人用机械手臂的拍摄组件正视剖面结构示意图;图4为本发明提出的一种消防机器人用机械手臂的防护外壳的侧视平面结构示意图;图5为本发明提出的一种消防机器人用机械手臂的a部分放大结构示意图;图6为本发明提出的一种消防机器人用机械手臂的固定环与滑动环的立体拆分结构示意图;图7为本发明提出的一种消防机器人用机械手臂的b部分放大结构示意图。
19.图例说明:1、底座;2、外壳体;3、夹持手;4、拍摄组件;401、凹槽;402、连接柱;403、第一齿盘;404、第一转轴;405、传动链条;406、第二转轴;407、防护外壳;408、第二电机;409、第一滑槽;410、连接杆;411、移动丝杠;412、第一丝杠座;413、安装块;414、配重块;415、照明灯;416、风扇;417、摄像头;418、第二齿盘;5、夹持驱动块;6、连接块;7、第一连杆;8、配重组件;801、第一锥齿轮;802、第二锥齿轮;803、进出液管;804、固定环;805、滑动环;806、伸缩软管;807、固定箱;808、第二滑槽;809、第一移动轮;810、第二丝杠座;811、调整丝杠;812、第三转轴;813、第三锥齿轮;814、第四锥齿轮;815、第四转轴;816、配重水箱;9、散热组件;901、出气管;902、气囊;903、支撑环;904、第三滑槽;905、第二移动轮;906、挤压块;10、连接座;11、第一驱动件;12、第二连杆;13、第二驱动件;14、转动台;15、主动轮;16、传动带;17、第一电机;18、主转轴;19、第一腔体;20、转柱;21、第二腔体;22、从动轮;23、第五转轴。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
21.请参阅图1-7,本发明提供一种技术方案:一种消防机器人用机械手臂,包括底座
1,底座1顶部固定连接有外壳体2,外壳体2内部开设有第一腔体19,第一腔体19内壁底部通过轴承转动连接有主转轴18,主转轴18顶部固定连接有转动台14,转动台14底部固定连接有散热组件9,转动台14顶部中心位置固定连接有转柱20,转柱20内部开设有第二腔体21,第二腔体21内活动连接有配重组件8,转柱20顶部固定连接有连接座10,连接座10顶部通过第五转轴23转动连接有第二连杆12,第五转轴23一端固定连接有第一驱动件11,第二连杆12远离连接座10的一端通过销轴铰接有第一连杆7,且销轴一端固定连接有第二驱动件13,第一连杆7一端转动连接有连接块6,连接块6底部固定连接有夹持驱动块5,夹持驱动块5一侧固定连接有拍摄组件4,夹持驱动块5底部活动连接有夹持手3。
22.第一腔体19内壁底部固定连接有第一电机17,第一电机17输出轴一端固定连接有主动轮15,主动轮15一侧通过传动带16传动连接有从动轮22,从动轮22与主转轴18外表面卡接。
23.散热组件9包括支撑环903,支撑环903顶部与转动台14底部固定连接,支撑环903内壁一侧固定连接有挤压块906,挤压块906一侧贴合有气囊902,气囊902与第一腔体19内壁底部固定连接,气囊902一端固定连接有多个出气管901,出气管901正对第一电机17,支撑环903底部固定连接有多个第二移动轮905,第二移动轮905与第一腔体19内壁底部开设的第三滑槽904滑动连接,第三滑槽904横截面形状为环形。
24.实施方式具体为:通过设置散热组件9,挤压块906周期性气囊902进行挤压,气囊902受到挤压后排出空气,空气通过出气管901对第一电机17进行散热降温,从而能够避免第一电机17因温度过高而损坏,提高了第一电机17的使用寿命,同时也提高了机械手臂在高温情况下的运行流畅度,同时,支撑环903底部的第二移动轮905配合第三滑槽904,能够减少支撑环903与第一腔体19内壁底座1的摩擦力,减少了转动台14的转动难度,同时,支撑环903对转动台14起到支撑作用,提高了转动台14的稳定性能。
25.配重组件8包括固定箱807,固定箱807底部与转动台14顶部固定连接,固定箱807内壁两侧之间通过第三转轴812转动连接有调整丝杠811,第三转轴812一端延伸至第二腔体21内并固定连接有第三锥齿轮813,第三锥齿轮813一侧啮合有第四锥齿轮814,第四锥齿轮814通过第四转轴815转动连接于第二腔体21内壁,第四转轴815一端贯穿第二腔体21与连接座10并固定连接有第二锥齿轮802,第二锥齿轮802顶部啮合有第一锥齿轮801,第一锥齿轮801与第五转轴23相卡接,调整丝杠811外表面螺纹连接有第二丝杠座810,第二丝杠座810顶部固定连接有配重水箱816,配重水箱816顶部固定连接有伸缩软管806,伸缩软管806顶部固定连接有滑动环805,滑动环805顶部转动连接有固定环804,固定环804顶部与第一腔体19内壁固定连接,固定环804顶部一侧固定连接有进出液管803,进出液管803延伸至外壳体2外部,第二丝杠座810底部固定连接有两个第一移动轮809,第一移动轮809与固定箱807内壁底部开设的第二滑槽808滑动连接。
26.实施方式具体为:通过设置配重组件8,调整丝杠811带动第二丝杠座810向第一腔体19外侧移动,使中心始终保持在中心位置,从而提高了机械手臂的运行中的中心平衡,避免机械手臂因为重心失衡而影响运行,同时,通过控制配重水箱816内的水的质量,能够更具不同的情况调整机械手臂的重心位置,提高机械手臂的适用性。
27.拍摄组件4包括连接柱402,连接柱402与夹持驱动块5固定连接,连接柱402远离夹持驱动块5的一端通过第二转轴406转动连接有防护外壳407,第二转轴406外表面卡接有第
二齿盘418,第二齿盘418一侧通过传动链条405传动连接有第一齿盘403,第一齿盘403通过第一转轴404与连接柱402内部开设的凹槽401内壁两侧转动连接,第一转轴404外表面卡接有连接杆410,连接杆410与连接柱402底部开设的第一滑槽409滑动连接,第一滑槽409与凹槽401相连通,连接杆410底部固定连接有配重块414,第一滑槽409两端均设置有安装块413,安装块413与连接柱402底部固定连接,安装块413内部通过第六转轴转动连接有移动丝杠411,且两个移动丝杠411之间固定连接,且两个移动丝杠411沿中心位置呈对称分布,且两个移动丝杠411螺纹方向相反,移动丝杠411外表面螺纹连接有第一丝杠座412,第一丝杠座412一侧与连接柱402底部相贴合,第一丝杠座412一侧与连接杆410相贴合,且第六转轴一端固定连接有第二电机408,第二电机408通过安装板与夹持驱动块5一侧固定安装,防护外壳407内部中心位置嵌设有摄像头417,摄像头417两侧均设置有风扇416,摄像头417上下两端均设置有照明灯415,风扇416与照明灯415均嵌设于防护壳体一侧。
28.实施方式具体为:通过设置拍摄组件4,当夹持驱动块5角度发生变化时配重块414在自身重力作用下发生转动,配重块414带动第一转轴404转动,第一转轴404通过一齿盘带动第二齿盘418转动,第二齿盘418通过第二转轴406带动防护外壳407转动,使防护外壳407始终稳定在水平状态,从而避免摄像头417在火灾现场移动时不稳定而影响拍摄效果,能够提高拍摄质量,方便消防人员了解火灾现场的具体情况,提高救援效果,同时,拍摄组件4通过第二丝杠座810对连接杆410的限位,能够使摄像头417随着连接柱402移动偏移,提供多种的摄像方式,方便消防人员根据实际需要进行选择,通过设置风扇416,能够对火灾现场的烟雾进行一定的驱散,提高拍摄质量。
29.工作原理:使用时,工作人员根据实际情况先通过进出液管803对配重水箱816内添加清水,调整机械手臂的稳定性,机械手臂需要轴向旋转动时,工作人员打开第一电机17,第一电机17带动主动轮15转动,主动轮15通过传动带16带动从动轮22转动,从动轮22带动主转轴18转动,主转轴18带动转动台14转动,转动台14带动转柱20转动,转柱20带动连接座10转动,从而带动第一连杆7、第二连杆12与连接块6转动,在此过程中,固定箱807始终处于与第一连杆7、第二连杆12与连接块6的相反方向,保持机械手臂的重心,同时,当第二连杆12向下转动时,机械手臂重心向前偏移,在此过程中,第二连杆12通过第五转轴23带动第一锥齿轮801转动,第一锥齿轮801带动第二锥齿轮802转动,第二锥齿轮802带动第四转轴815转动,第四转轴815带动第四锥齿轮814转动,第四锥齿轮814带动第三锥齿轮813转动,第三锥齿轮813通过第三转轴812带动调整丝杠811转动,调整丝杠811带动第二丝杠座810向第一腔体19外侧移动,从而保证了机械手臂的稳定性。
30.在第一电机17转动的过程中,转动台14带动支撑环903转动,支撑环903带动第二移动轮905在第三滑槽904内滑动,支撑环903带动挤压块906转动,挤压块906周期性气囊902进行挤压,气囊902受到挤压后排出空气,空气通过出气管901对第一电机17进行散热降温。
31.在机械手臂运作的过程中,夹持驱动块5竖直方向上的角度不断发生变化,在此过程中,配重块414在重力的作用下始终保持与水平面垂直的状态,当夹持驱动块5角度发生变化时,夹持驱动块5带动连接柱402偏移,配重块414在自身重力作用下发生转动,配重块414通过连接杆410带动第一转轴404转动,第一转轴404带动第一齿盘403转动,第一齿盘403通过传动链条405带动第二齿盘418转动,第二齿盘418带动第二转轴406转动,第二转轴
406带动防护外壳407转动,使防护外壳407始终稳定在水平状态,从而使摄像头417终稳定在水平状态,若需要摄像头417跟随连接柱402一同偏转,工作人员打开第二电机408,第二电机408带动通过第六转轴带动两个移动丝杠411转动,两个移动丝杠411带动两个第一丝杠座412相互靠近并对连接杆410进行夹持限位,从而能够阻止第一齿盘403转动,从而能够使摄像头417能够随着连接柱402一同偏转。
32.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。