技术特征:
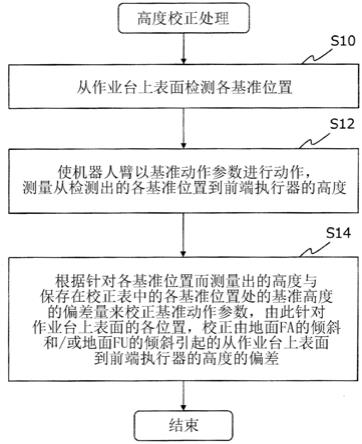
1.一种高度校正系统,其具有:第1地面上的作业台;第2地面上的台车;多关节机器人臂,其设置在所述台车上,并且该多关节机器人臂在前端部具有前端执行器;存储装置,其存储有预先准备的校正表;以及控制器,其利用所述校正表来校正由所述第1地面的倾斜和/或所述第2地面的倾斜引起的从所述作业台的上表面到所述前端执行器的高度的偏差,使所述多关节机器人臂对所述作业台的上表面的工件进行动作,其中,在所述校正表中,将所述作业台设置于第1基准地面且所述台车设置于第2基准地面并且所述多关节机器人臂以给定的基准动作参数进行动作时的、从所述作业台的上表面的至少一部分的区域内的多个位置分别到各所述位置的正上方的所述前端执行器的高度与各所述位置对应地进行保存,并且,所述校正表分别保存从在所述作业台的上表面预先定义的至少3个基准位置到各基准位置正上方的所述前端执行器的基准高度,所述控制器执行如下动作:从所述作业台的上表面检测所述至少3个基准位置;使所述多关节机器人臂以所述基准动作参数进行动作,测量从检测出的各所述基准位置到所述前端执行器的高度;以及根据针对各所述基准位置而测量出的所述高度与保存在所述校正表中的各所述基准位置处的所述基准高度的偏差量来校正所述基准动作参数,由此针对所述作业台的上表面的各所述位置,校正由所述第1地面的倾斜和/或所述第2地面的倾斜引起的从所述作业台的上表面到所述前端执行器的高度的偏差。2.根据权利要求1所述的高度校正系统,其中,所述控制器校正所述基准动作参数,以使针对各所述基准位置而测量出的所述高度与保存在所述校正表中的各所述基准位置处的所述基准高度的偏差量更小。3.根据权利要求1或2所述的高度校正系统,其中,所述至少3个基准位置包含所述作业台的上表面的第1基准位置、第2基准位置以及第3基准位置,在所述校正表中,将所述第1基准位置与所述第1基准位置处的到所述前端执行器的第1基准高度对应地进行保存,在所述校正表中,将所述第2基准位置与所述第2基准位置处的到所述前端执行器的第2基准高度对应地进行保存,在所述校正表中,将所述第3基准位置与所述第3基准位置处的到所述前端执行器的第3基准高度对应地进行保存,在所述校正表中,将所述作业台的上表面的其他n个位置分别与所述n个位置各自的到所述前端执行器的高度对应地进行保存,n为正整数,所述控制器执行如下动作:
计算经过由所述第1基准位置和在所述第1基准位置处测量出的所述高度的组、所述第2基准位置和在所述第2基准位置处测量出的所述高度的组以及所述第3基准位置和在所述第3基准位置处测量出的所述高度的组确定的3个三维位置的假想的平面;将分别经过所述n个位置的铅垂线与所述假想的平面相交的位置处的高度近似为所述n个位置各自的到所述前端执行器的高度;以及根据针对所述n个位置分别在所述校正表中对应的高度与近似的所述高度的偏差量来校正所述n个位置各自的所述基准动作参数。4.根据权利要求3所述的高度校正系统,其中,所述控制器校正所述n个位置各自的所述基准动作参数,以使针对所述n个位置分别近似的所述高度与保存在所述校正表中的所述n个位置各自的所述高度的偏差量更小。5.根据权利要求1至4中的任意一项所述的高度校正系统,其中,所述第1基准位置、所述第2基准位置、所述第3基准位置以及所述n个位置是所述作业台的上表面的格子点的位置。6.根据权利要求1至5中的任意一项所述的高度校正系统,其中,所述第1地面的倾斜与所述第1基准地面的倾斜不同,所述控制器校正由所述第1地面的倾斜引起的从所述作业台的上表面到所述前端执行器的高度的偏差。7.根据权利要求1至6中的任意一项所述的高度校正系统,其中,所述第2地面的倾斜与所述第2基准地面的倾斜不同,所述控制器校正由所述第2地面的倾斜引起的从所述作业台的上表面到所述前端执行器的高度的偏差。8.根据权利要求1至7中的任意一项所述的高度校正系统,其中,所述作业台与制作所述校正表时的作业台不同。9.根据权利要求1至7中的任意一项所述的高度校正系统,其中,所述台车和所述多关节机器人臂的组合与制作所述校正表时的台车和多关节机器人臂的组合不同。
技术总结
高度校正系统具有:第1地面上的作业台;第2地面上的台车;台车上的多关节机器人臂,其具有前端执行器;存储装置,其存储有校正表;控制器。在校正表中,将针对作业台上表面的各位置而从上表面到该上表面的正上方的前端执行器的高度与各位置对应地进行保存,并且保存从在作业台上表面预先定义的至少3个基准位置到各基准位置正上方的前端执行器的基准高度。控制器使臂以基准动作参数进行动作,测量从各基准位置到前端执行器的高度,根据针对各基准位置而测量出的高度与保存在校正表中的基准高度的偏差量来校正基准动作参数从而校正高度的偏差。偏差。偏差。
技术研发人员:池尻匡隆
受保护的技术使用者:日本电产株式会社
技术研发日:2020.09.23
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。