1.本发明属于隧道施工技术领域,具体涉及一种机器人焊接钢拱架连接板用自动定位装置。
背景技术:
2.在隧道施工过程需要用到钢拱架对隧道底壁进行支撑,隧道钢拱架由若干钢拱架分段连接而成构成,钢拱架分段包括由工字钢制作而成的弧形结构的钢拱架主体、焊接在钢拱架主体两端的钢端板构成,使用时相邻的钢拱架分段通过钢端板平整抵接在一起然后将钢端板固定(如焊接,螺丝配合螺母锁紧)在一起实现对接,为了使得对接在一起的钢拱架分段受力不产生偏移,则要求钢端板所在的平面为同弧形主体所在的圆的直径的面且弧形主动位于钢端板的几何中心。钢拱架主体为直线结构的工字钢通过弯圆机完成对应曲率的弧形、然后用裁断结构裁断出要求长度的钢拱架主体。现有技术中将钢端板焊接到钢拱架主体上时为人工握持住进行定位在需要的位置,费力且制约了钢端板焊接自动化的实现。
技术实现要素:
3.本发明旨在提供一种机器人焊接钢拱架连接板用自动定位装置,用于将钢端板固定在钢拱架端面,为钢端板的自动化焊接奠定了基础。
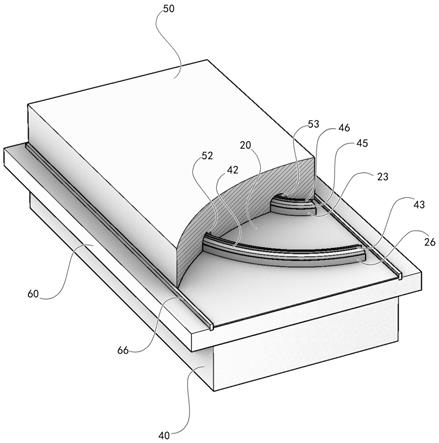
4.以上技术问题时通过以下技术方案解决的:一种机器人焊接钢拱架连接板用自动定位装置,其特征在于,包括三维移动架和连接在三维移动架上的钢端板固定机械手,所述钢端板固定机械手包括背板、连接在背板竖向一侧的背板部竖定位条、连接在背板下侧的背板部水平定位条、设置在背板上的将钢端板吸附在背板上用的电磁铁、螺纹连接在背板部竖定位条上的伸入到背板正面上的横向定位顶杆和螺纹连接在背板部水平定位条上的伸入到背板的正面上的竖向定位顶杆,背板部水平定位条同背板部竖定位条垂直,工字钢包括两块侧钢板和将两块侧钢板的中部连接在一起的连接钢板,两块侧钢板和连接钢板三者呈“工”字形连接在一起,钢端板为矩形;使钢端板同钢拱架主体连接在一起的方法为:第一步、将钢端板安装到钢端板固定机械手上:调整横向定位顶杆伸入到背板正面的距离到设定值,调整竖向定位顶杆伸入到背板正面的距离到设定值,将钢端板平置在背板上,调整钢端板的一侧边缘同背板部竖定位条抵接在一起,使钢端板抵接在背板部水平定位条上;第二步、启动所述电磁铁,电磁铁产生的磁力将钢端板吸附在背板上;第三步、通过所述三维移动架移动钢端板固定机械手而使得钢端板抵接在钢拱架主体的端面上到横向定位顶杆顶在侧钢板上、竖向定位顶杆顶在连接钢板上,此时钢端板的几何中心同工字钢横截面的几何中心对齐;第四步、将钢端板同钢拱架主体焊接在一起。能够方便地实现钢端板和钢拱架主动横截面的对中固定,从而使得每一块钢端板同钢拱架主体的位置一致性好,便于钢拱架之间通过螺丝穿过钢端板上的螺丝孔进行螺丝连接时,对接在一起的钢拱架位于同一个圆上。
5.本发明还包括控制单元和调节输送给电磁铁的电流大小的电流调节开关,钢拱架主体的端面为平面,背板的背面设有球型连接头,所述背板通过所述球型连接头球面铰接在所述三维移动架上;第三步后先调整钢端板到钢拱架主体的整个端面都同钢端板抵接在一起,然后进行第四步,第四步后停止给电磁铁供电;调整钢端板到钢拱架主体的整个端面都同钢端板抵接在一起的方法为:通过控制单元去控制电流调节开关增大输入给电磁铁的电流以增大电磁铁的吸附力,从而使得电磁铁对钢拱架主体也产生吸附力,该吸附力驱动背板以所述球型连接头为支点转动以改变钢端板的状态到钢拱架主体的整个端面都同钢端板抵接在一起,钢拱架主体的整个端面都同钢端板抵接在一起后则钢端板不能够转动。能够方便地实现钢端板同钢拱架主体的整个端面抵接在一起,使得钢拱架对接时,两根钢拱架上的钢端板能够配置贴合在一起,从而提高钢拱架对接在一起时的连接稳固性。
6.本发明还包括无线信号发生器和无线信号接收器,钢端板的几何中心设有工艺孔,所述工艺孔为通孔,所述背板的正面设有盲孔,所述无线信号发生器安装在所述盲孔内,钢端板固定在钢端板固定机械手上时所述工艺孔同所述盲孔对齐;判断钢拱架主体的整个端面是否都同钢端板抵接在一起的方法为:通过无线信号发生器发出信号的同时通过无线信号接收器接收无线信号发生器发出的信号,如果无线信号接收器接收到了无线信号发生器发出的信号则表示钢拱架主体的整个端面没有都同钢端板抵接在一起,如果无线信号接收器没有接收无线信号发生器发出的信号则表示钢拱架主体的整个端面都同钢端板抵接在一起。封闭住了工艺孔而屏蔽掉了无线信号发生器发出的信号,则信号不能够发出。能够方便地获知电磁铁的力是否驱动到了钢端板移动到钢拱架主体的端面同钢端板全部抵接在一起(即垂直)。
7.作为优选,所述三维移动架包括移动架部底架、通过移动架部纵向移动结构支撑在移动架底座上的移动架部中架、通过移动架部升降结构连接在移动架部中架上的移动架部顶架和通过移动架部横向移动结构连接在移动架部顶架上的移动架部连接臂,所述钢端板固定机械手连接在所述移动架部连接臂上。
8.作为优选,所述移动架部纵向移动结构包括设置在移动架部底架上的底架部纵滑轨、滑动连接在底架部纵滑轨上的中架部滑块、连接在移动架部中架上的中架部螺纹套、螺纹连接在中架部螺纹套上的中架部纵向丝杆和驱动中架部纵向丝杆转动的纵向丝杆驱动电机,所述纵向丝杆驱动电机固定在移动架部底架上,移动架部中架同所述中架部滑块连接在一起。
9.作为优选,所述移动架部升降结构包括中架部升降气缸和下端连接在移动架部中架上的中架部竖导向杆,所述移动架部顶架通过所述中架部升降气缸支撑在所述移动架部中架上,所述中架部竖导向杆的上端穿设在移动架部顶架上的导向孔内。
10.作为优选,所述移动架部横向移动结构包括设置在移动架部顶架上的顶架部横滑轨、滑动连接在顶架部横滑轨上的连接臂部滑块、设置在连接臂部滑块上的滑块部螺纹通孔、螺纹连接在滑块部螺纹通孔内的顶架部横向丝杆和驱动顶架部横向丝杆转动的横向丝杆驱动电机,所述横向丝杆驱动电机固定在移动架部顶架上,移动架部连接臂同所述顶架部滑块固定在一起。
11.本发明的有益效果为:能够在焊接上钢端板时替代人工握持钢端板,推提高了钢端板焊接时的安全性,为钢端板的自动化焊接奠定了基础。
附图说明
12.图1为本发明的使用状态示意图;图2为图1的d—d剖视示意图;图3为钢端板上料结构的电气部分的示意图;图4为工字钢的横截面示意图。
13.图中:工字钢37、侧钢板22、连接钢板23、钢槽24、背板105、背板部竖定位条106、背板部水平定位条109、电磁铁110、横向定位顶杆111、竖向定位顶杆112、钢端板113、电源114、控制单元115、电流调节开关116、球型连接头117、无线信号发生器118、无线信号接收器119、工艺孔120、盲孔121、移动架部底架122、移动架部中架123、移动架部顶架124、移动架部连接臂125、底架部纵滑轨126、中架部滑块127、中架部螺纹套128、中架部纵向丝杆129、纵向丝杆驱动电机130、中架部升降气缸131、中架部竖导向杆132、顶架部横滑轨133、连接臂部滑块134、顶架部横向丝杆135、横向丝杆驱动电机136。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
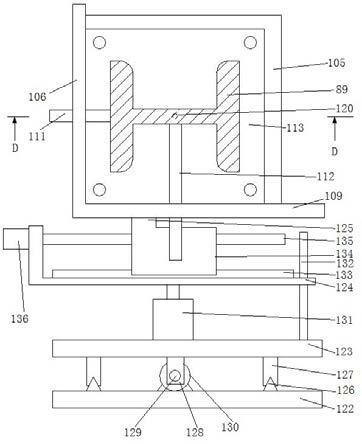
15.参见图1到图4,一种机器人焊接钢拱架连接板用自动定位装置,包括三维移动架和连接在三维移动架上的钢端板固定机械手。钢端板固定机械手包括背板105、连接在背板竖向一侧的背板部竖定位条106、连接在背板下侧的背板部水平定位条109、设置在背板上的将钢端板吸附在背板上用的电磁铁110、螺纹连接在背板部竖定位条上的伸入到背板正面上的横向定位顶杆111和螺纹连接在背板部水平定位条上的伸入到背板的正面上的竖向定位顶杆112,背板部水平定位条同背板部竖定位条垂直。
16.使钢端板同钢拱架主体连接在一起的方法为:第一步、将钢端板安装到钢端板固定机械手上:调整横向定位顶杆伸入到背板正面的距离到设定值,调整竖向定位顶杆伸入到背板正面的距离到设定值,将钢端板平置在背板上,调整钢端板的一侧边缘同背板部竖定位条抵接在一起,使钢端板抵接在背板部水平定位条上;第二步、启动电磁铁(即使电源114给电磁铁供电),电磁铁产生的磁力将钢端板吸附在背板上;第三步、通过所述三维移动架移动钢端板固定机械手而使得钢端板抵接在钢拱架主体的端面上到横向定位顶杆顶在侧钢板上、竖向定位顶杆顶在连接钢板上,此时钢端板的几何中心同工字钢横截面的几何中心对齐;第四步、将钢端板同钢拱架主体通过电弧机焊接在一起。电焊机为焊接机器人。本发明还包括控制单元115和调节输送给电磁铁的电流大小的电流调节开关116,钢拱架主体的端面为平面,背板的背面设有球型连接头117,背板通过所述球型连接头球面铰接在三维移动架上;第三步后先调整钢端板到钢拱架主体的整个端面都同钢端板抵接在一起,然后进行第四步,第四步后停止给电磁铁供电;调整钢端板到钢拱架主体的整个端面都同钢端板抵接在一起的方法为:通过控制单元去控制电流调节开关增大输入给电磁铁的电流以增大电磁铁的吸附力,从而使得电磁铁对钢拱架主体也产生吸附力,该吸附力驱动背板以所述球型连接头为支点转动以改变钢端板的状态到钢拱架主体的整个端面都同钢端板抵
接在一起,钢拱架主体的整个端面都同钢端板抵接在一起后则钢端板不能够转动。还包括无线信号发生器118和无线信号接收器119,钢端板的几何中心设有工艺孔120,工艺孔为通孔,背板的正面设有盲孔121,无线信号发生器安装在盲孔内,钢端板固定在钢端板固定机械手上时工艺孔同盲孔对齐;判断钢拱架主体的整个端面是否都同钢端板抵接在一起的方法为:通过无线信号发生器发出信号的同时通过无线信号接收器接收无线信号发生器发出的信号,如果无线信号接收器接收到了无线信号发生器发出的信号则表示钢拱架主体的整个端面没有都同钢端板抵接在一起,此时控制装置使得电路调节开关继续加大供给电磁铁的电路以提高吸引力,如果无线信号接收器没有接收无线信号发生器发出的信号则表示钢拱架主体的整个端面都同钢端板抵接在一起,此时控制装置时电源输送给电磁铁的电流维持不变。焊接维持后控制装置使电源停止供电给电磁铁。三维移动架包括移动架部底架122、通过移动架部纵向移动结构支撑在移动架底座上的移动架部中架123、通过移动架部升降结构连接在移动架部中架上的移动架部顶架124和通过移动架部横向移动结构连接在移动架部顶架上的移动架部连接臂125,钢端板固定机械手连接在移动架部连接臂上。移动架部纵向移动结构包括设置在移动架部底架上的底架部纵滑轨126、滑动连接在底架部纵滑轨上的中架部滑块127、连接在移动架部中架上的中架部螺纹套128、螺纹连接在中架部螺纹套上的中架部纵向丝杆129和驱动中架部纵向丝杆转动的纵向丝杆驱动电机130,纵向丝杆驱动电机固定在移动架部底架上,移动架部中架同中架部滑块连接在一起。移动架部升降结构包括中架部升降气缸131和下端连接在移动架部中架上的中架部竖导向杆132,移动架部顶架通过中架部升降气缸支撑在移动架部中架上,中架部竖导向杆的上端穿设在移动架部顶架上的导向孔内。移动架部横向移动结构包括设置在移动架部顶架上的顶架部横滑轨133、滑动连接在顶架部横滑轨上的连接臂部滑块134、设置在连接臂部滑块上的滑块部螺纹通孔、螺纹连接在滑块部螺纹通孔内的顶架部横向丝杆135和驱动顶架部横向丝杆转动的横向丝杆驱动电机136,横向丝杆驱动电机固定在移动架部顶架上,移动架部连接臂同顶架部滑块固定在一起。工字钢包括两块侧钢板22和将两块侧钢板的中部连接在一起的连接钢板23,侧钢板和连接钢板围出两个钢槽24,两块侧钢板和连接钢板三者呈“工”字形连接在一起,钢端板113为矩形,工字钢在整个加工过程中都为钢槽沿上下方向的方式进行移动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。