1.本发明属于机械工程设计技术领域,具体涉及一种相交轴锥形双螺杆转子型线设计方法、转子及设备。
背景技术:
2.双螺杆转子由于高效可靠等优点,已被应用在双螺杆压缩机、扭叶罗茨机、双螺杆真空泵,螺杆泵等双螺杆机械领域。但是,这种结构也带来了间隙泄漏和转子受力不平衡等问题,以及由此产生的能量损失、噪声、轴承磨损和转子变形等问题。双螺杆机械的性能从根本上取决于一对转子的结构。因此,双螺杆转子结构的优化得到了广泛的研究。
3.近年来,双螺杆转子的内压缩技术由于其高流量和低能耗的优点被广泛使用。在双螺杆转子可变几何的研究中,变螺距转子首先被提出来。然而,由于排气端的薄齿和深槽,变螺距转子在排气端会存在较大的热变形和较差的密封性等问题,这对双螺杆机械的可靠性以及热力性能是不利的。锥形转子由于其直径沿着轴向变化的特点可以解决这一问题,锥形转子最大的优点就是其齿间面积会沿着轴向缩小,由此会带来接触线和泄露三角形的减小,从而减少泄露,因此锥形转子相比于变螺距转子具有更大的潜力。然而,目前对锥形转子的研究大都停留在平行轴传动领域,转子无法实现较大的锥度,且转子的截面形状会沿着轴向发生变形,这些问题限制了锥形转子的潜力。因此,相交轴传动的锥形转子被提出来,此时两个转子之间的关系属于空间啮合范畴,转子曲面的生成更为复杂,但目前还没有相关的公开文献。因此研究相交轴锥形双螺杆转子的生成方法是很有必要的,如何提高相交轴锥形转子的锥度,以及降低双螺杆转子的接触线和泄露三角形,从而有效减少泄露亟待研究。
技术实现要素:
4.本发明的目的在于针对上述现有技术中的问题,提供一种相交轴锥形双螺杆转子型线设计方法、转子及设备,能够使双螺杆转子的接触线和泄露三角形大幅度下降。
5.为了实现上述目的,本发明有如下的技术方案:
6.一种相交轴锥形双螺杆转子型线设计方法,包括以下步骤:
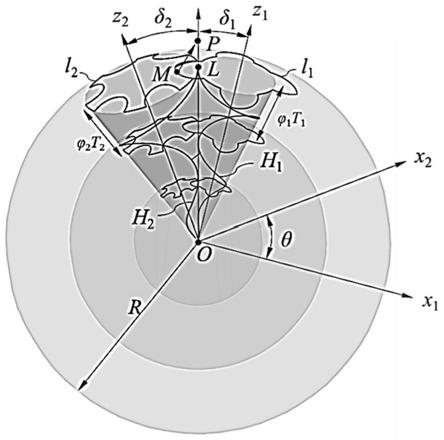
7.步骤一、建立锥形转子的空间外啮合模型;
8.所述锥形转子的空间外啮合模型如下:oz1是转子1的转轴,oz2是转子2的转轴,oz1与oz2相交于点o并且夹角为θ,转子的啮合关系由两个圆锥面来表示,两个圆锥面相切地做纯滚动运动并且它们的接触线始终为ol,ol为顺时回转轴线;
9.步骤二、在球心为o,半径不同的一系列球面上,给定转子1形成锥形所需要的型线族;
10.步骤三、根据空间啮合理论,求出给定型线族的共轭曲线族作为转子2形成锥形所需要的型线族;
11.步骤四、求出两个转子形成锥形螺杆转子各自所需要的圆锥螺旋线;
12.步骤五、将两个转子的型线族沿着各自的圆锥螺旋线扫描得到各自的转子曲面。
13.一种相交轴锥形双螺杆转子,包括空间啮合的转子1和转子2;
14.所述转子1和转子2的参数满足如下关系式:
[0015][0016]
式中,δ1为转子1上圆锥的锥角,δ2为转子2上圆锥的锥角;r1为转子1任意截面上的节圆半径,r2为转子2任意截面上的节圆半径;rs1为转子1的初始节圆半径,rs2为转子2的初始节圆半径;φ1为转子1的旋转角度,φ2为转子2的旋转角度;m1为转子1的齿数,m2为转子2的齿数;i
12
为转子1与转子2之间的传动比。
[0017]
更进一步的,所述转子1和转子2的坐标系之间还满足如下关系式:
[0018]
ox1y1z1为固结在转子1上的动坐标系,ox2y2z2为固结在转子2上的动坐标系;
[0019]
ox1y1z1为转子1的静坐标系,ox2y2z2为转子2的静坐标系;
[0020]
ox1y1z1到ox2y2z2的转换矩阵m
nm
满足:
[0021][0022]
ox1y1z1到ox1y1z1的转换矩阵m
m1
满足:
[0023][0024]
ox2y2z2到ox2y2z2的转换矩阵m
2n
满足:
[0025][0026]
其中,φ=φ1,φ2=
±i12
φ;正号代表内啮合,负号代表外啮合。
[0027]
作为本发明相交轴锥形双螺杆转子的一种优选方案,所述转子1的型线族表示为l1(r,t),转子1的型线族在动坐标系ox1y1z1中的表达式为:
[0028][0029]
其中,t为任意球面上的型线参数,r为转子型线所在球面的球面半径;
[0030]
l1(r,t)在动坐标系ox1y1z1中的法向量为:
[0031][0032]
l1(r,t)在动坐标系ox2y2z2中的曲线族为:
[0033][0034]
l1(r,t)的共轭曲线在动坐标系ox2y2z2中由如下表达式确定:
[0035][0036]
其中f=0为啮合方程,转子1和转子2在它们的啮合点m处有相同的法线且公法线通过瞬时回转轴线ol,假设公法线与ol的交点为p,p点在动坐标系ox1y1z1中的相对坐标为:
[0037][0038]
啮合方程符合如下关系式:
[0039][0040]
其中u为p点在ol上的位置参数,通过求解啮合方程解出φ,得到转子2的型线族l2(r,t);转子2的型线族l2(r,t)在动坐标系ox2y2z2中的表达式为:
[0041][0042]
作为本发明相交轴锥形双螺杆转子的一种优选方案,在圆锥螺旋线中,转子1的螺旋角为螺距为t1;转子2的螺旋角为螺距为t2;满足以下表达式:
[0043][0044]
球面半径r满足以下关系:
[0045][0046]
转子1的螺旋线h1的方程为:
[0047]
[0048]
转子2的螺旋线h2的方程为:
[0049][0050]
其中,m
h1
为转子1的螺旋变换矩阵,计算表达式如下:
[0051][0052]mh2
为转子2的螺旋变换矩阵,计算表达式如下:
[0053][0054]
作为本发明相交轴锥形双螺杆转子的一种优选方案,所述转子1和转子2的曲面由球面型线族沿着圆锥螺旋线扫描而成;
[0055]
转子1的曲面σ1的方程为:
[0056][0057]
转子2的曲面σ2的方程为:
[0058][0059]
作为本发明相交轴锥形双螺杆转子的一种优选方案,所述转子1和转子2在求解过程中的独立变量包括转子1的齿数m1,转子2的齿数m2,两转子转轴的夹角θ,转子1的螺距t1和螺旋角两转子转轴的夹角θ决定相交轴锥形双螺杆转子的锥度大小。
[0060]
一种双螺杆机械设备,转子采用本发明所述的相交轴锥形双螺杆转子。
[0061]
所述双螺杆机械设备包括双螺杆压缩机、螺杆泵、扭叶罗茨鼓风机以及双螺杆真空泵。
[0062]
相较于现有技术,本发明至少具有如下的有益效果:
[0063]
本发明可以生成在双螺杆机械中被视为具有极大潜力的锥形转子,设计者可以采用本发明提供的设计方法生成相交轴锥形双螺杆转子,包括内啮合和外啮合。相比于现有的平行轴锥形转子,本发明生成的相交轴锥形转子的锥度更大,可以实现转子间的齿间面积沿着轴向大幅度下降,从而使双螺杆转子的接触线和泄露三角形大幅度下降,理论上可以有效的减少双螺杆机械的泄露,同时锥形结构还可以改善转子的受力情况。本发明基于空间啮合模型,通过球面上的型线族沿着圆锥螺旋线扫描生成转子的三维曲面,转子的型线可以多种多样。本发明相交轴锥形双螺杆转子型线设计方法解决了这类锥形转子生成困难的问题,生成的锥形转子可以实现较大的锥度,可以应用在双螺杆压缩机、螺杆泵、扭叶罗茨鼓风机以及双螺杆真空泵等领域,从而改善它们的泄露与受力问题,进一步提高这些双螺杆机械的性能。
附图说明
[0064]
图1本发明转子空间外啮合模型示意图;
[0065]
图2本发明转子空间内啮合模型示意图;
[0066]
图3本发明外啮合转子生成过程的型线族和螺旋线示意图;
[0067]
图4本发明外啮合转子生成过程的三维曲面示意图;
[0068]
图5本发明内啮合转子生成过程的型线族和螺旋线示意图;
[0069]
图6本发明内啮合转子生成过程的三维曲面示意图;
[0070]
图7本发明实施例球面上的外啮合型线示意图;
[0071]
图8本发明实施例θ=20
°
锥度下的外啮合相交轴锥形双螺杆转子三维曲面示意图;
[0072]
图9本发明实施例θ=30
°
锥度下的外啮合相交轴锥形双螺杆转子三维曲面示意图;
[0073]
图10本发明实施例θ=40
°
锥度下的外啮合相交轴锥形双螺杆转子三维曲面示意图;
[0074]
图11本发明实施例θ=50
°
锥度下的外啮合相交轴锥形双螺杆转子三维曲面示意图;
[0075]
图12本发明实施例球面上的内啮合型线示意图;
[0076]
图13本发明实施例θ=4
°
锥度下的内啮合相交轴锥形双螺杆转子三维曲面示意图;
[0077]
图14本发明实施例θ=6
°
锥度下的内啮合相交轴锥形双螺杆转子三维曲面示意图;
[0078]
图15本发明实施例θ=8
°
锥度下的内啮合相交轴锥形双螺杆转子三维曲面示意图;
[0079]
图16本发明实施例θ=10
°
锥度下的内啮合相交轴锥形双螺杆转子三维曲面示意图。
具体实施方式
[0080]
下面结合附图及实施例对本发明做进一步的详细说明。
[0081]
实施例1
[0082]
本发明提出的一种相交轴锥形双螺杆转子型线设计方法,包括以下步骤:
[0083]
如图1和图2所示,第一步,建立锥形转子的空间外啮合模型。图中oz1是转子1的转轴,oz2是转子2的转轴,oz1与oz2相交于点o并且夹角为θ。转子的啮合关系可以由两个圆锥面来表示。两个圆锥相切地做纯滚动运动并且它们的接触线始终为ol,ol被称为顺时回转轴线。如图3和图4以及图5和图6所示,第二步,在球心为o,半径不同的一系列球面上,给定转子1形成锥形所需要的型线族。第三步,根据空间啮合理论,求出给定型线族的共轭曲线族作为转子2形成锥形所需要的型线族。第四步,求出两个转子形成锥形螺杆转子各自所需要的圆锥螺旋线。第五步,将两个转子的型线族沿着各自的圆锥螺旋线扫描得到各自的转子曲面。如图7所示,本发明设计了一种球面上的外啮合型线可用于外啮合的相交轴锥形转子的生成,该型线有着正确的空间外啮合关系。如图8,9,10,11所示,根据本发明的方法用
这种外啮合型线可以生成不同锥度下的外啮合相交轴锥形双螺杆转子。如图12所示,本发明设计了一种球面上的内啮合型线可用于内啮合的相交轴锥形转子的生成,该型线有着正确的空间内啮合关系。如图13,14,15,16所示,根据本发明的方法用这种内啮合型线可以生成不同锥度下的内啮合相交轴锥形双螺杆转子。
[0084]
本发明实施例的一种相交轴锥形双螺杆转子如下:
[0085]
如图1和图2所示,转子1上圆锥的锥角为δ1,转子2上圆锥的锥角为δ2。r1是转子1任意截面上的节圆半径,r2是转子2任意截面上的节圆半径。rs1是转子1的初始节圆半径,rs2是转子2的初始节圆半径。φ1是转子1的旋转角度,φ2是转子2的旋转角度。转子1的齿数为m1,转子2的齿数为m2。转子1与转子2之间的传动比为i
12
。
[0086]
上述参数之间满足:
[0087][0088]
ox1y1z1为固结在转子1上的动坐标系,ox2y2z2为固结在转子2上的动坐标系。ox1y1z1为转子1的静坐标系,ox2y2z2为转子2的静坐标系。
[0089]
ox1y1z1到ox2y2z2的转换矩阵为m
nm
,则:
[0090][0091]
ox1y1z1到ox1y1z1的转换矩阵为m
m1
,则:
[0092][0093]
ox2y2z2到ox2y2z2的转换矩阵为m
2n
,则:
[0094][0095]
其中,φ=φ1,φ2=
±i12
φ。正号代表内啮合,负号代表外啮合。
[0096]
如图3和图4以及图5和图6所示,转子1的型线族表示为l1(r,t),其在ox1y1z1中的表达式为:
[0097][0098]
其中t为任意球面上的型线参数,r为转子型线所在球面的球面半径。
[0099]
l1(r,t)在ox1y1z1中的法向量为:
[0100][0101]
l1(r,t)在ox2y2z2中的曲线族为:
[0102][0103]
l1(r,t)的共轭曲线在ox2y2z2中由下列式子确定:
[0104][0105]
其中f=0为啮合方程,转子1和转子2在它们的啮合点m处有相同的法线且公法线通过瞬时回转轴线ol,假设公法线与的ol交点为p。假设p点在ox1y1z1中的相对坐标为:
[0106][0107]
根据这一性质啮合方程可以导出如下:
[0108][0109]
其中,u为p点在ol上的位置参数。
[0110]
通过求解啮合方程解出φ,从而得到转子2的型线l2(r,t)。
[0111][0112]
所述圆锥螺旋线中,转子1的螺旋角为螺距为t1。转子2的螺旋角为螺距为t2。它们满足:
[0113][0114]
则球面半径r满足以下关系:
[0115][0116]
转子1的螺旋线h1的方程为:
[0117]
[0118]
转子2的螺旋线h2的方程为:
[0119][0120]
其中,m
h1
为转子1的螺旋变换矩阵,满足:
[0121][0122]mh2
为转子2的螺旋变换矩阵,满足:
[0123][0124]
转子的曲面由球面型线族沿着圆锥螺旋线扫描而成。
[0125]
转子1的曲面σ1的方程为:
[0126][0127]
转子2的曲面σ2的方程为:
[0128][0129]
以上求解过程中的独立变量为:
[0130]
转子1的齿数m1,转子2的齿数m2,两转子转轴的夹角θ,转子1的螺距t1和螺旋角对于锥形转子,θ是最为关键的参数,因为其决定了转子的锥度大小。
[0131]
如图7以及图8,9,10,11所示,为了使用本发明所述方法生成一种外啮合的相交轴锥形双螺杆转子,本发明进一步设计了一种球面上的外啮合型线,如图7所示。
[0132]
其设计过程如下:
[0133]
1、取转子1的齿数m1为4,转子2的齿数m2为6。
[0134]
2、取转子1型线l1的单个齿的组成型线为ab,bc,cf,fg。转子2型线l2是l1的共轭曲线,l2单个齿的组成型线为bc,cd,de。
[0135]
其中,bc为球面上的一段销齿圆弧,其上所有点的法线都通过ol。故bc既是转子1的齿顶型线,又是转子2的齿根型线。bc在ox1y1z1中方程为:
[0136][0137]
其中k为齿高系数,一般取0.2~0.3。
[0138]
b点落在转子2的节圆上,b点在ox2y2z2中的坐标满足:
[0139][0140]
c点在ox1y1z1中的坐标满足:
[0141][0142]
其中,g为保护角度,一般取0
°
~10
°
。
[0143]
转子1上c点的点啮合摆线为cd,其作为转子2的型线。cd在ox2y2z2中的方程为:
[0144][0145]
d点落在转子2的节圆上,d点在ox2y2z2中的坐标满足:
[0146][0147]
转子2上d点的点啮合摆线为cf,其作为转子1的型线。cf在ox1y1z1中的方程为:
[0148][0149]
f点落在转子1的节圆上,f点在ox1y1z1中的坐标满足:
[0150][0151]
fg是转子1节圆上的一段圆弧,a点到f点对应的弧度为2π/m1。de是转子2节圆上的一段圆弧,b点到e点对应的弧度为2π/m2。
[0152]
在得到球面上的外啮合型线后,就可以利用本发明所述方法生成该型线所对应的外啮合相交轴锥形双螺杆转子。生成过程如下:
[0153]
首先,选取不同的θ值(20
°
,30
°
,40
°
,50
°
),适当选取其他参数,其它参数的选取与常规的平行轴双螺杆转子类似,不再赘述。然后根据下式可生成转子1的螺旋线h1。
[0154][0155]
根据下式可生成转子2的螺旋线h2。
[0156][0157]
最后,根据下式可生成转子1的三维曲面σ1。
[0158][0159]
根据下式可生成转子2的曲面σ2。
[0160][0161]
如图8,9,10,11所示,根据上述过程可生成不同锥度大小的外啮合相交轴锥形双螺杆转子三维曲面。
[0162]
如图12以及图13,14,15,16所示,为了使用本发明所述方法生成一种内啮合的相交轴锥形双螺杆转子,本发明还设计了一种球面上的内啮合型线,如图12所示。
[0163]
其设计过程如下:
[0164]
1、取转子1的齿数m1为1,转子2的齿数m2为2。
[0165]
2、取转子1型线l1为球面上的整圆。l1在ox1y1z1中方程为:
[0166][0167]
其中q为决定该整圆半径大小的的角度。
[0168]
转子2型线l2是l1的共轭曲线,l2单个齿的组成型线为mn,nw。
[0169]
其中,mn为l1的一半圆弧。nw是球面上的一段圆弧,nw在ox2y2z2中的方程为:
[0170][0171]
在得到球面上的内啮合型线后,就可以利用本发明所述方法生成该型线所对应的内啮合相交轴锥形双螺杆转子。生成过程如下:
[0172]
首先,选取不同的θ值(4
°
,6
°
,8
°
,10
°
),适当选取其他参数。然后根据下式可生成转子1的螺旋线h1。
[0173][0174]
根据下式可生成转子2的螺旋线h2。
[0175][0176]
最后,根据下式可生成转子1的三维曲面σ1。
[0177][0178]
根据下式可生成转子2的曲面σ2。
[0179][0180]
如图13,14,15,16所示,根据上述过程可生成不同锥度大小的内啮合相交轴锥形双螺杆转子三维曲面。
[0181]
本发明相交轴锥形双螺杆转子型线设计方法基于空间啮合模型,通过球面上的型线族沿着圆锥螺旋线扫描生成转子的三维曲面。通过本发明的设计方法可以生成相交轴的锥形双螺杆转子机构,转子的型线可以多种多样。为了说明本发明的转子生成过程,本发明设计了一种球面上的外啮合型线和一种球面上的内啮合型线,型线由圆弧、点和点啮合摆线组成,可以实现正确的空间啮合关系。根据本发明所述方法,可以用所设计的型线生成不同锥度下的内啮合和外啮合相交轴锥形双螺杆转子的三维曲面。本发明相交轴锥形双螺杆转子型线设计方法生成的锥形转子可以实现较大的锥度,可应用在双螺杆压缩机、螺杆泵、扭叶罗茨鼓风机和双螺杆真空泵等领域,改善泄露与转子受力,进一步提高这些双螺杆机械的性能。
[0182]
以上所述的仅仅是本发明的较佳实施例,并不用以对本发明的技术方案进行任何
限定,本领域技术人员应当理解的是,在不脱离本发明精神和原则的前提下,该技术方案还可以进行若干简单的修改和替换,这些修改和替换也均属于权利要求书涵盖的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。