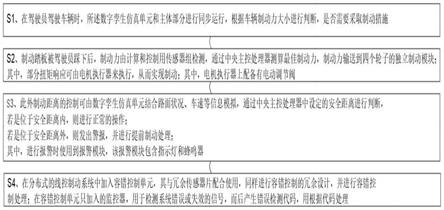
1.本发明涉及露天矿山智能运输技术领域,更具体地,涉及一种无人驾驶车辆制动系统故障诊断及处理方法。
背景技术:
2.随着国家大力推广矿山智能化的建设与无人驾驶技术的蓬勃发展,无人驾驶的引入逐渐成为了主流,现有技术方案只针对制动信号丢失进行故障诊断,未系统地对车辆制动故障进行诊断或者对各个系统采用同一故障诊断方法,无法有效定位制动系统故障,使车辆发生制动失控现象。
技术实现要素:
3.本公开的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
4.根据本公开的实施例,提供了一种制动系统故障诊断及处理方法,包括:
5.当车辆的无人驾驶控制器发出制动指令后实时获取车辆的实时制动减速度a0;
6.采集车辆所在路面的坡度;
7.基于坡度与制动减速度关系图获取与所述坡度相对应的无油门无制动状况下的车辆减速度a5;以及
8.基于实时制动减速度a0、与所述制动指令相对应的期望制动减速度a6,以及所获取的与所述坡度相对应的无油门无制动状况下的车辆减速度a5来评估所述车辆的制动系统的故障等级。
9.在根据本公开的一种示例性实施例中,基于实时制动减速度a0、与所述制动指令相对应的期望制动减速度a6,以及所获取的与所述坡度相对应的无油门无制动状况下的车辆减速度a5来评估所述车辆的制动系统的故障等级包括:从所述车辆的无人驾驶控制器发出制动指令开始的预定时间内:
10.如果a6>a0≥a5时,则判定为制动系统一级故障;
11.如果a5>a0>0时,则判定为制动系统三级故障;
12.如果a0≥a6时,则判定为制动系统无故障。
13.在根据本公开的一种示例性实施例中,在基于实时制动减速度a0、与所述制动指令相对应的期望制动减速度a6,以及所获取的与所述坡度相对应的无油门无制动状况下的车辆减速度a5来评估所述车辆的制动系统的故障等级之前还包括:
14.判断所获取的实时制动减速度a0是否小于等于0,如果所获取的实时制动减速度a0大于0,则判定为车辆仍在加速,油门未松开,如果所获取的实时制动减速度a0小于等于0,则执行所述车辆的制动系统的故障等级的评估。
15.在根据本公开的一种示例性实施例中,所述车辆的无人驾驶控制器发出的控制指令为预期制动减速度a6或者与预期致动减速度a6对应的制动踏板开度。
16.在根据本公开的一种示例性实施例中,所述制动系统故障诊断及处理方法,还包
括:
17.采集车辆在不同装载情况下并在不同坡度路面行驶时的无油门无制动状况下的制动减速度数据,以及
18.基于所采集的制动减速度数据生成坡度与制动减速度关系图。
19.在根据本公开的一种示例性实施例中,所述不同装载情况包括空载和重载。
20.在根据本公开的一种示例性实施例中,所述车辆的实时制动减速度a0是通过下式计算的:
21.a0=δv/δt,
22.其中,δt取100ms。
23.在根据本公开的一种示例性实施例中,所述车辆的实际制动减速度a0是通过惯性测量装置直接测得的。
24.在根据本公开的一种示例性实施例中,所述制动系统故障诊断及处理方法,还包括直接监测所述车辆的电子制动系统在线及故障情况。
25.在根据本公开的一种示例性实施例中,直接监测电子制动系统在线及故障情况包括:通过整车控制器识别电子制动系统相关报文,当电子制动系统报文全部丢失的时间大于等于第一预定时间段时,则判定为电子制动系统掉线,并将电子制动系统掉线故障发送给无人驾驶控制器,所述无人驾驶控制器将该电子制动系统掉线故障标记为三级故障。
26.在根据本公开的一种示例性实施例中,直接监测电子制动系统在线及故障情况包括:如果整车控制器接收到所述电子制动系统的相关故障信息,则判定为电子制动系统故障,并将所述电子制动系统故障发送给无人驾驶控制器,所述无人驾驶控制器将根据电子制动系统故障种类对所述电子制动系统故障进行分级。
27.在根据本公开的一种示例性实施例中,所述制动系统故障诊断及处理方法,还包括直接监测所述车辆的电子驻车制动系统在线及故障情况。
28.在根据本公开的一种示例性实施例中,直接监测电子驻车制动系统在线及故障情况包括:通过整车控制器识别电子驻车制动系统相关报文,当电子驻车制动系统报文全部丢失的时间大于等于第二预定时间段时,则判定为电子驻车制动系统掉线,并将电子驻车制动系统掉线故障发送给无人驾驶控制器,所述无人驾驶控制器将该电子驻车制动系统掉线故障标记为三级故障。
29.在根据本公开的一种示例性实施例中,直接监测电子驻车制动系统在线及故障情况包括:如果整车控制器接收到电子驻车制动系统的相关故障信息,则判定为电子驻车制动系统故障,并将该电子驻车制动系统故障发送给所述无人驾驶控制器,所述无人驾驶控制器将根据电子驻车制动系统故障种类对所述电子驻车制动系统故障进行分级
30.根据本公开上述各种实施例所述的制动系统故障诊断及处理方法可以有效识别无人驾驶过程中制动系统故障,避免因制动系统故障引起的车辆失控情况。
31.应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
32.附图用于更好地理解本方案,不构成对本公开的限定。其中:
33.图1是根据本公开的一种示例性实施例的无人驾驶制动故障诊断系统的硬件框架图。
34.图2是根据本公开的一种示例性实施例的制动系统故障诊断及处理方法的流程图。
35.图3是根据本公开的一种示例性实施例的坡度与制动减速度关系图。
具体实施方式
36.为更清楚地阐述本公开的目的、技术方案及优点,以下将结合附图对本公开的实施例进行详细的说明。应当理解,下文对于实施例的描述旨在对本公开的总体构思进行解释和说明,而不应当理解为是对本公开的限制。在说明书和附图中,相同或相似的附图标记指代相同或相似的部件或构件。为了清晰起见,附图不一定按比例绘制,并且附图中可能省略了一些公知部件和结构。
37.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。措词“一”或“一个”不排除多个。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”“顶”或“底”等等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。当诸如层、膜、区域或衬底基板之类的元件被称作位于另一元件“上”或“下”时,该元件可以“直接”位于另一元件“上”或“下”,或者可以存在中间元件。
38.如图1所示,根据本公开的无人驾驶制动故障诊断系统包括无人驾驶控制器(automated driving control unit,adcu)10、整车控制器(vehicle control unit,vcu)20、电子驻车制动系统(electric parking brake,epb)30、电子制动系统(electronic brake systems,ebs)40、引擎控制模块(engine control module,ecm)50。其中,无人驾驶控制器10与整车控制器20之间通过can总线通信;整车控制器20与电子制动系统40、电子驻车制动系统30、引擎控制模块50之间通过can总线进行通信。
39.根据本公开的制动系统故障诊断方法将故障等级分为一级故障、二级故障和三级故障,其中三级故障为最严重故障,二级故障为严重故障,一级故障为不严重故障。
40.如图2所示,根据本公开的一种示例性实施例的一种制动系统故障诊断及处理方法,包括:
41.s10:当车辆的无人驾驶控制器10发出制动指令后实时获取车辆的实时制动减速度a0;
42.s20:采集车辆所在路面的坡度信息;
43.s30:基于坡度与制动减速度关系图获取与所述坡度相对应的无油门无制动状况下的车辆减速度a5;以及
44.s40:基于实时制动减速度a0、与所述制动指令所对应的期望制动减速度a6,以及所获取的与所述坡度相对应的无油门无制动状况下的车辆减速度a5来评估车辆的制动系
统的故障等级。
45.在车辆自动驾驶运行中,当车辆的无人驾驶控制器10发出制动指令后,无人驾驶控制器10例如可以根据整车控制器20反馈的车速计算车辆的实时制动减速度a0,或者通过与无人驾驶控制器10通信的惯性测量装置60所测得的数据实时计算车辆的实时制动减速度a0;其中车辆所在路面的坡度信息可以由惯性测量装置60直接采集,并发送给无人驾驶控制器10。然后无人驾驶控制器10基于坡度与制动减速度关系图获取与所述坡度相对应的无油门无制动状况下的车辆减速度a5;并基于实时制动减速度a0、与所述制动指令所对应的期望制动减速度a6,以及所获取的与所述坡度相对应的无油门无制动状况下的车辆减速度a5来评估车辆的制动系统的故障等级。
46.具体地,基于实时制动减速度a0、与所述制动指令所对应的期望制动减速度a6,以及所获取的与所述坡度相对应的无油门无制动状况下的车辆减速度a5来评估车辆的制动系统的故障等级包括:从所述车辆的无人驾驶控制器1010发出制动指令开始的预定时间内:
47.如果a6>a0≥a5时,则判定为制动系统一级故障;
48.如果a5>a0>0时,则判定为制动系统三级故障;
49.如果a0≥a6时,则判定为制动系统无故障。
50.在该实施例中,从所述车辆的无人驾驶控制器1010发出制动指令开始的预定时间可以选取为1秒,需要说明的是,在本公开的其它一些实施例中,从所述车辆的无人驾驶控制器1010发出制动指令开始的预定时间也可以选取为2秒,2.5秒、3秒等其它数值。
51.在该实施例中,该制动系统故障诊断及处理方法还包括在执行步骤s40之前,执行步骤s15:判断所获取的实时制动减速度a0是否小于等于0,如果所获取的实时制动减速度a0小于等于0,则执行步骤s50;如果所获取的实时制动减速度a0大于0,则判定为车辆仍在加速,油门未松开,此时提醒无人驾驶车辆。
52.在本实施例中,车辆的无人驾驶控制器1010发出的控制指令为所期望的制动减速度a6,然而,在本公开未示出的一些实施例中,车辆的无人驾驶控制器1010发出的控制指令也可以为与预期致动减速度a6对应的制动踏板开度,所期望的制动减速度a6可以基于该制动踏板开度计算得出。
53.在本实施例中,该制动系统故障诊断及处理方法还包括:s51:采集车辆在不同装载情况下在不同坡度路面行驶时的无油门无制动状况下的制动减速度数据,并s52:基于所采集的制动减速度数据生成坡度与制动减速度关系图。例如,在空载情况下对车辆数据进行采集,并写入无人驾驶控制器1010:采集车辆在平路(即,坡度为0)上运行并在无油门无制动状况下的制动减速度;采集在多个典型的坡度路面上运行并在无油门无制动状况下的制动减速度。然而基于所采集的制动减速度数据生成车辆在空载情况下的坡度与制动减速度关系图(其中,车辆下坡坡度为正,上坡坡度为负),如图3所示。同样地,也可以在重载情况下对车辆在不同坡度路面行驶时的无油门无制动状况下的制动减速度数据进行采集,并基于所采集的制动减速度数据生成车辆在重载情况下的坡度与制动减速度关系图。
54.在该实施例中,车辆的装载情况包括空载和重载。然而,在本发明的其他一些实施例中,也可以将车辆的装载情况划分得更加细致,例如空载,25%装载、50%装载、75%装载和满载等。
55.在一种示例性实施例中,在自动驾驶运行中,根据整车控制器20反馈的车速通过下式计算车辆的实时制动减速度a0:
56.a0=δv/δt,
57.其中,δv是车辆在δt内的速度差;
58.δt取100ms。
59.然而,在本公开未示出的一些实施例中,车辆的实时制动减速度a0也可以通过惯性测量装置60或本领域技术人员已知的设备直接测得。该惯性测量装置60与无人驾驶控制器10通信,以将所测量的实时制动减速度a0传送给无人驾驶控制器10。
60.在该实施例中,该制动系统故障诊断及处理方法还包括直接监测电子制动系统40在线及故障情况。具体地,通过整车控制器20识别电子制动系统40相关报文,当电子制动系统40报文全部丢失的时间大于等于第一预定时间段时,则判定为电子制动系统40掉线,并将电子制动系统40掉线故障发送给无人驾驶控制器1010,所述无人驾驶控制器1010将该电子制动系统40掉线故障标记为三级故障。此外,如果整车控制器20接收到电子制动系统40的相关故障信息,则判定为电子制动系统40故障,并将电子制动系统40丢失故障发送给无人驾驶控制器1010,无人驾驶控制器1010将根据电子制动系统40故障种类对故障进行分级。
61.在该实施例中,该制动系统故障诊断及处理方法还包括直接监测电子驻车制动系统30在线及故障情况。具体地,通过整车控制器20识别电子驻车制动系统30相关报文,当电子驻车制动系统30报文全部丢失的时间大于等于第二预定时间段时,则判定为电子驻车制动系统30掉线,并将电子驻车制动系统30掉线故障发送给无人驾驶控制器1010,所述无人驾驶控制器1010将该电子驻车制动系统30掉线故障标记为三级故障。此外,如果整车控制器20接收到电子驻车制动系统30的相关故障信息,则判定为电子驻车制动系统30故障,并将该电子驻车制动系统30故障发送给所述无人驾驶控制器1010,所述无人驾驶控制器1010将根据电子驻车制动系统30故障种类对所述电子驻车制动系统30故障进行分级。
62.根据本公开上述各种实施例所述的可以有效识别无人驾驶过程中制动系统故障,避免因制动系统故障引起的车辆失控情况。
63.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开公开的技术方案所期望的结果,本文在此不进行限制。
64.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。