1.本发明属于数字孪生领域,具体是一种基于数字孪生的线控制动系统及其动态优化控制方法。
背景技术:
2.目前,数字孪生是充分利用物理模型、传感器更新、运行历史等数据,集成多学科、多物理量、多尺度、多概率的仿真过程,在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程;数字孪生是一种超越现实的概念,可以被视为一个或多个重要的、彼此依赖的装备系统的数字映射系统;
3.现有在将数字孪生技术运用到车辆制动形成的过程时,对于车辆的线控制动系统,其为电子控制制动系统,分为机械式线控制动系统和液压式线控制动系统,其中,机械式线控制动系统简称rmb,其与常规的液压制动系统截然不同,emb以电能为能量来源,通过电机驱动制动垫块,由电线传递能量,数据线传递信号,emb是线制动系统的一种;液压式线控制动系统简称ehb,其是从传统的液压制动系统发展来的,但与传统制动方式有很大的不同,ehb以电子元件替代了原有的部分机械元件,是一个先进的机电一体化系统,它将电子系统和液压系统相结合;
4.现有使用到的车辆线控制动系统中,在车辆具体行驶时会出现如下技术问题:驾驶过程中对于系统错误或是失效的信号无法及时进行处理,或是处理的不够全面,容易影响系统的判断,对于在驾驶员进行驾驶的过程中的安全性有待提高。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种基于数字孪生的线控制动系统及其动态优化控制方法,解决现有背景技术中提到的问题。
7.(二)技术方案
8.为实现以上目的,本发明通过以下技术方案予以实现:
9.一种基于数字孪生的线控制动系统及其动态优化控制方法,包括:
10.控制单元、执行单元以及数字孪生仿真单元,所述控制单元和执行单元形成主体部分,该主体部分通过数据线与数字孪生仿真单元连接;
11.所述控制单元包含整车控制器和电机控制器,用于根据制动需求控制电机实施制动或补充;
12.所述执行单元包含计算和控制用传感器组、若干独立的电机制动模块、电源模块以及制动踏板模块;
13.所述数字孪生仿真单元用于模拟控制单元和执行单元真实制动参数,并与模拟的环境参数结合,优化制动控制信号的计算,实现间接控制主体部分的通信与数据交互;
14.还包括容错控制单元,其包含微控制芯片和监控器,该容错控制单元安装到控制
单元中,用于检测系统错误或失效的信号。
15.进一步的,所述整车控制器包括中央主控处理器、can通信模块、调试模块以及串口通信模块;
16.所述串口通信模块设置到中央主控处理器外侧,用于连接整车控制器和各个执行单元,该处串口通信模块用于对控制系统的诊断和标定;所述调试模块用于对控制系统的诊断和标定。
17.通过采用上述技术方案:上述can通信模块符合can2.0b技术规范,采用了光电隔离、电源隔离等多项抗干扰设计。
18.进一步的,所述电机控制器用于控制各个独立的电机制动模块。
19.进一步的,所述计算和控制用传感器组包含轮速传感器、压力传感器和温度传感器;其中,
20.所述轮速传感器用于监测车轮运动状态;
21.所述压力传感器和温度传感器用于轮缸压力的反馈控制以及不同温度范围的修正控制。
22.进一步的,所述电源模块包含至少两组刀片电池组,所述刀片电池组由若干刀片电池相互串连而成;该处电源模块进行了二级滤波的冗余设计,保证控制器在车载12v系统供电情况下正常工作,并具短路保护功能。
23.进一步的,所述制动踏板模块包含踏板感觉模拟器、踏板力传感器、踏板行程传感器以及制动踏板;
24.所述踏板感觉包含踏板反作用力和踏板行程,该踏板感觉模拟器用于为驾驶员提供与实际操作时的踏板感觉;
25.所述踏板传感器和踏板行程传感器均用于监测驾驶员的操作意图;具体的,踏板传感器用于监测驾驶员的操纵意图,一般采用踏板行程传感器,采用踏板力传感器的较少,也有二者同时应用,以提供冗余传感器且可用于故障诊断。
26.进一步的,所述制动踏板模块中还包括冗余传感器,且冗余传感器与踏板感觉模拟器、踏板力传感器以及踏板行程传感器均通过导线连接,用于故障诊断。
27.一种基于数字孪生的线控制动系统,该系统的优化控制方法的具体步骤为:
28.s1、在驾驶员驾驶车辆时,所述数字孪生仿真单元和主体部分进行同步运行,根据车辆制动力大小进行判断,是否需要采取制动措施;
29.s2、制动踏板被驾驶员踩下后,制动力由计算和控制用传感器组检测,通过中央主控处理器测算最佳制动力,制动力输送到四个轮子的独立制动模块;
30.其中,部分扭矩响应可由电机执行器来执行,从而实现制动;其中,电机执行器上配备有电动调节阀。
31.s3、此外制动距离的控制可由数字孪生仿真单元结合路面状况、车速等信息模拟,通过中央主控处理器中设定的安全距离进行判断,
32.若是位于安全距离内,则进行正常的操作;
33.若是位于安全距离外,则发出警报,并进行提前制动处理;
34.其中,进行报警时使用到报警模块,该报警模块包含指示灯和蜂鸣器。
35.s4、在分布式的线控制动系统中加入容错控制单元,其与冗余传感器片配合使用,
同样进行容错控制的冗余设计,并进行容错控制处理;
36.在容错控制单元只加入的监控器,用于检测系统错误或失效的信号,而后产生错误检测代码,用根据代码处理。
37.(三)综上所述,本发明包括以下至少一种有益技术效果:
38.一是,本发明通过在分布式的线控制动系统中加入中央控制芯片,其进行容错控制的冗余设计,可配以专门编写的软件来进行容错控制处理;并在系统中引入一个监控器,可以检测可能导致系统错误和失效的信号,然后产生错误检测代码,与制动踏板模块中的冗余传感器结合,可以更加全面的与根据代码来处理失效和提高安全性;
39.二是,本发明通过将数字孪生仿真单元与报警模块结合使用,可在车辆行驶过程中,提前模拟刹车的情况,通过环境模拟和检测在遇到前方障碍的情况下,通过中央主控处理器进行安全距离的判断,可引导驾驶员进行提前制动处理,在一定程度上,大大提高了驾驶过程中的安全性。
附图说明
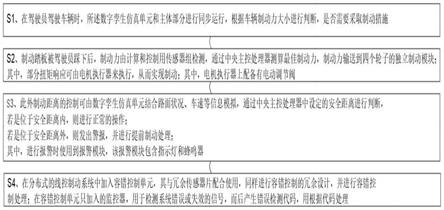
40.图1是本发明的系统优化控制方法的具体步骤示意图。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。此外,下文为了描述方便,所引用的“上”、“下”、“左”、“右”等于附图本身的上、下、左、右等方向一致,下文中的“第一”、“第二”等为描述上加以区分,并没有其他特殊含义。
42.实施例1:
43.本实施例给出线控制动系统的具体结构,一种基于数字孪生的线控制动系统,包括:控制单元、执行单元以及数字孪生仿真单元,所述控制单元和执行单元形成主体部分,该主体部分通过数据线与数字孪生仿真单元连接;
44.所述控制单元包含整车控制器和电机控制器,用于根据制动需求控制电机实施制动或补充;
45.所述执行单元包含计算和控制用传感器组、若干独立的电机制动模块、电源模块以及制动踏板模块;
46.所述数字孪生仿真单元用于模拟控制单元和执行单元真实制动参数,并与模拟和检测的环境参数结合,优化制动控制信号的计算,实现间接控制主体部分的通信与数据交互;
47.还包括容错控制单元,其包含微控制芯片和监控器,该容错控制单元安装到控制单元中,用于检测系统错误或失效的信号。
48.在一些示例中,所述整车控制器包括中央主控处理器、can通信模块、调试模块以及串口通信模块;所述串口通信模块设置到中央主控处理器外侧,用于连接整车控制器和各个执行单元,所述调试模块用于对控制系统的诊断和标定;所述电机控制器用于控制各
个独立的电机制动模块;
49.所述计算和控制用传感器组包含轮速传感器、压力传感器和温度传感器;其中,所述轮速传感器用于监测车轮运动状态;所述压力传感器和温度传感器用于轮缸压力的反馈控制以及不同温度范围的修正控制;
50.所述电源模块包含至少两组刀片电池组,所述刀片电池组由若干刀片电池相互串连而成,该电源模块用于对整个系统供能。
51.在一些示例中,所述制动踏板模块包含踏板感觉模拟器、踏板力传感器、踏板行程传感器以及制动踏板;
52.所述踏板感觉包含踏板反作用力和踏板行程,该踏板感觉模拟器用于为驾驶员提供与实际操作时的踏板感觉;
53.所述踏板传感器和踏板行程传感器均用于监测驾驶员的操作意图。
54.其中,所述制动踏板模块中还包括冗余传感器,且冗余传感器与踏板感觉模拟器、踏板力传感器以及踏板行程传感器均通过导线连接,用于故障诊断。
55.通过采用上述技术方案:
56.本发明通过在分布式的线控制动系统中加入中央控制芯片,其进行容错控制的冗余设计,可配以专门编写的软件来进行容错控制处理;并在系统中引入一个监控器,可以检测可能导致系统错误和失效的信号,然后产生错误检测代码,与制动踏板模块中的冗余传感器结合,可以更加全面的与根据代码来处理失效和提高安全性。
57.实施例2:
58.本实施例给出该系统优化控制方法的具体步骤,如图1所示,一种基于数字孪生的线控制动系统,该系统的优化控制方法的具体步骤为:
59.s1、在驾驶员驾驶车辆时,所述数字孪生仿真单元和主体部分进行同步运行,根据车辆制动力大小进行判断,是否需要采取制动措施;
60.s2、制动踏板被驾驶员踩下后,制动力由计算和控制用传感器组检测,通过中央主控处理器测算最佳制动力,制动力输送到四个轮子的独立制动模块;
61.其中,部分扭矩响应可由电机执行器来执行,从而实现制动;其中,电机执行器上配备有电动调节阀。
62.s3、此外制动距离的控制可由数字孪生仿真单元结合路面状况、车速等信息模拟,通过中央主控处理器中设定的安全距离进行判断,
63.若是位于安全距离内,则进行正常的操作;
64.若是位于安全距离外,则发出警报,并进行提前制动处理;
65.其中,进行报警时使用到报警模块,该报警模块包含指示灯和蜂鸣器。
66.s4、在分布式的线控制动系统中加入容错控制单元,其与冗余传感器片配合使用,同样进行容错控制的冗余设计,并进行容错控制处理;
67.在容错控制单元只加入的监控器,用于检测系统错误或失效的信号,而后产生错误检测代码,用根据代码处理。
68.通过采用上述技术方案:
69.本发明通过将数字孪生仿真单元与报警模块结合使用,可在车辆行驶过程中,提前模拟刹车的情况,通过环境模拟和检测在遇到前方障碍的情况下,通过中央主控处理器
进行安全距离的判断,可引导驾驶员进行提前制动处理,在一定程度上,大大提高了驾驶过程中的安全性。
70.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
